
Improved Streamflow Forecast in a Small-Medium Sized River Basin with Coupled WRF and WRF-Hydro: Effects of Radar Data Assimilation



Abstract
:
1. Introduction
2. Radar Data Assimilation Methodologies and the Coupled Model
2.1. Radar Data Assimilation Method and Quality Control
2.1.1. WRF-3DVar Data Assimilation
2.1.2. Radar Data Quality Control and Observation Operators
2.2. The Coupling Flood Forecasting Methods Based on Radar Data Assimilation
3. Experimental Setups of the Atmospheric-Hydrological Coupled Model
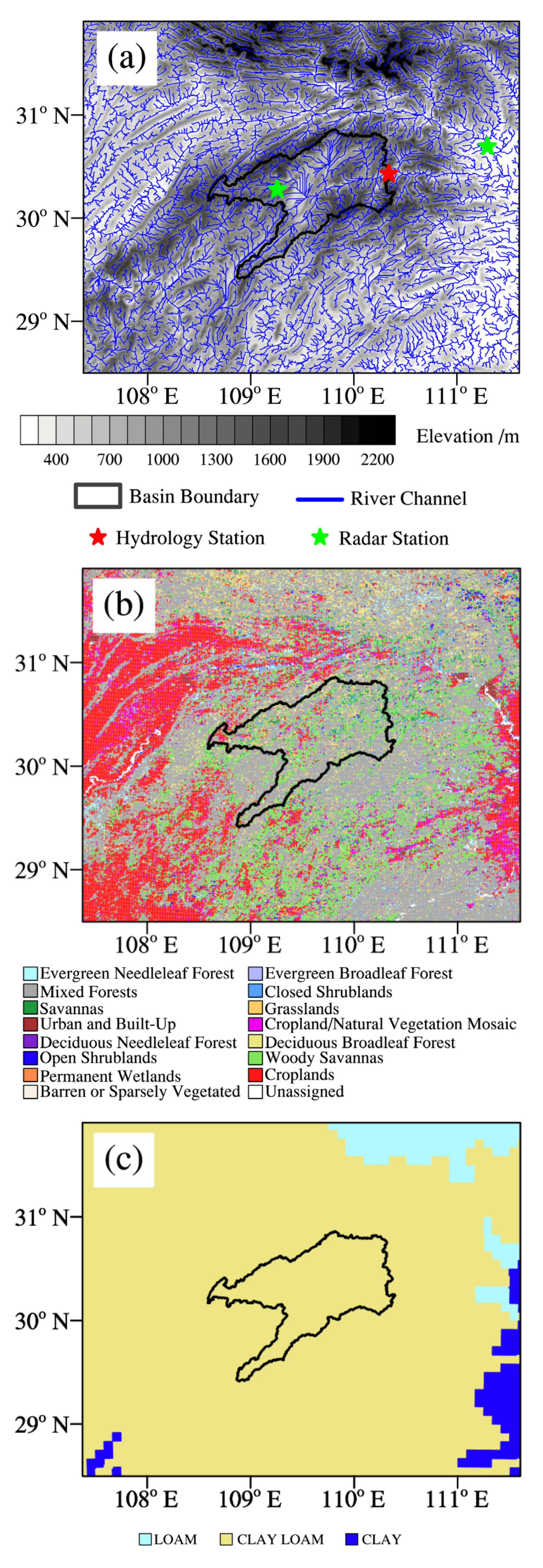
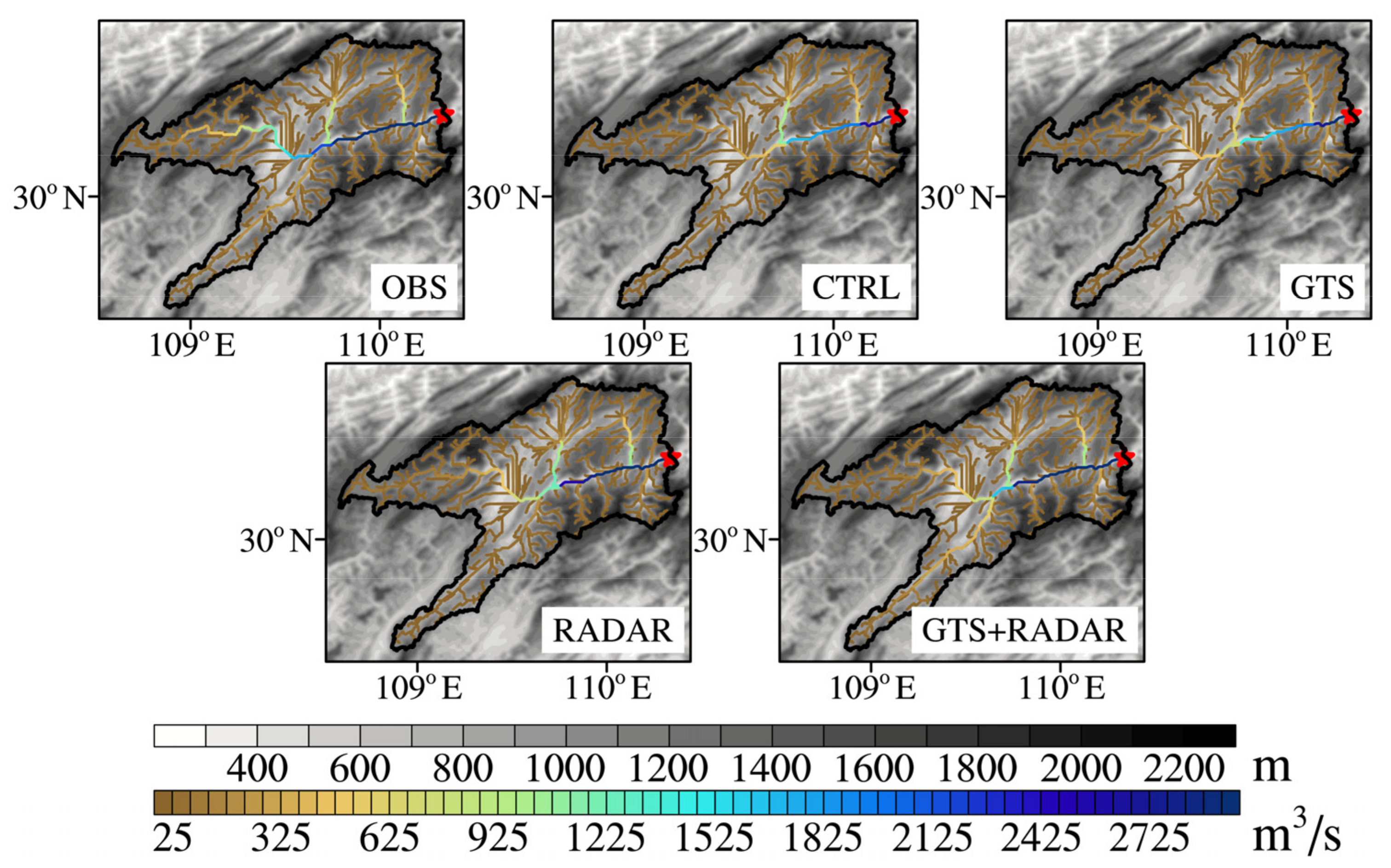
3.1. Qingjiang River Basin
3.2. The Coupled Model Configurations
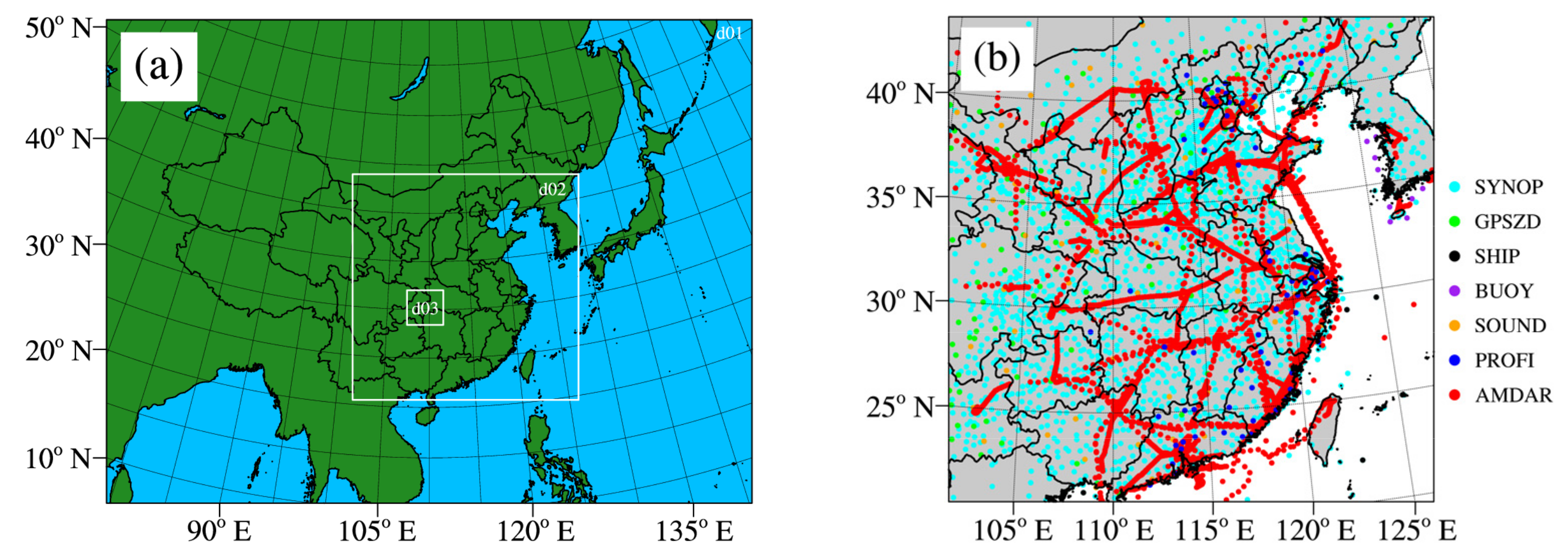
3.2.1. WRF Model and Data Assimilation Configurations
3.2.2. WRF-Hydro Model Configurations
4. Calibration and Validation of WRF-Hydro Model
4.1. Calibration Methods
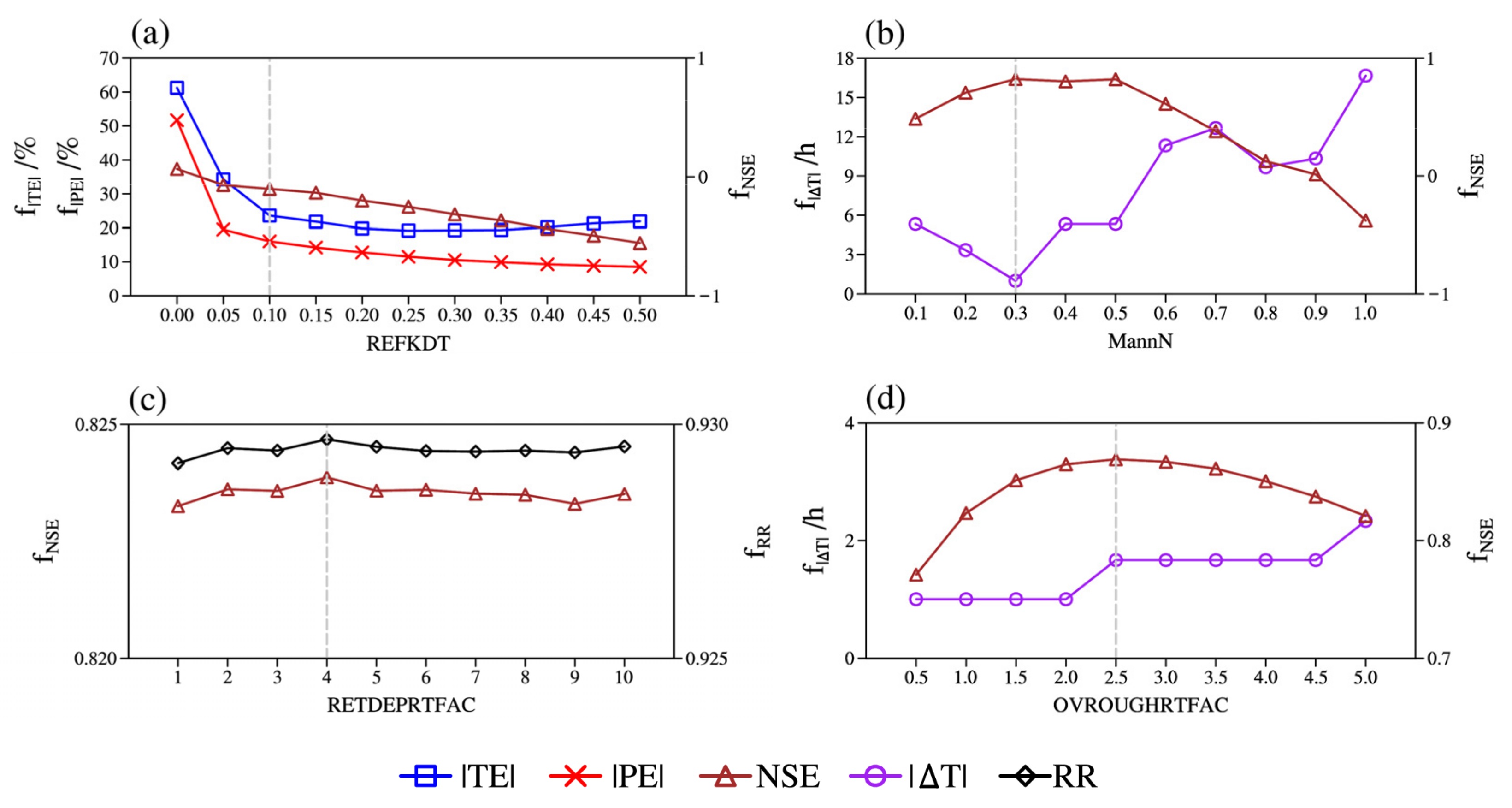
4.2. Results of Four Calibrated Parameters
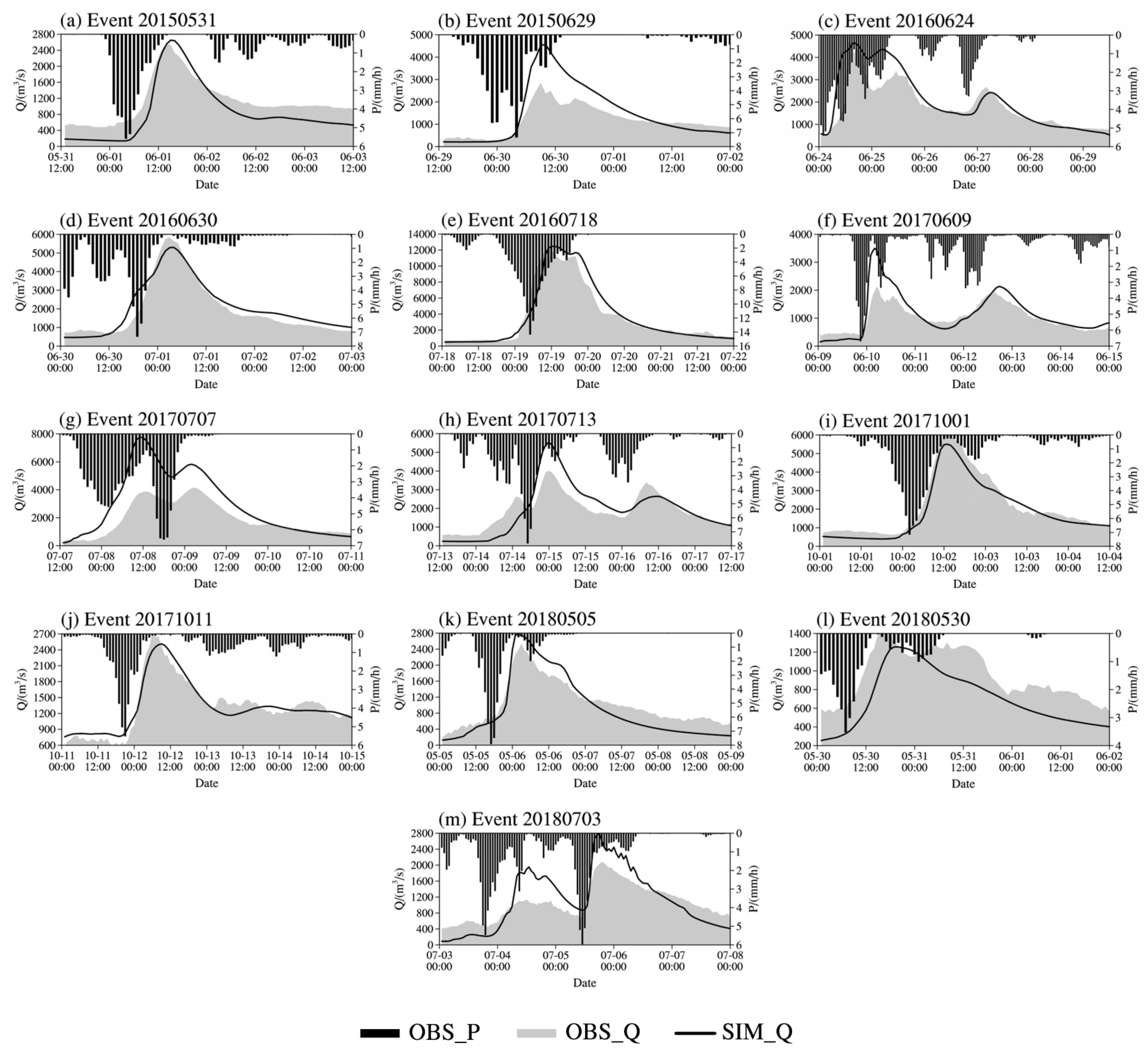
4.3. Validation of WRF-Hydro Model
5. Analysis of Coupling Forecast Results
5.1. Statistical Evaluation of Eight Flood Events
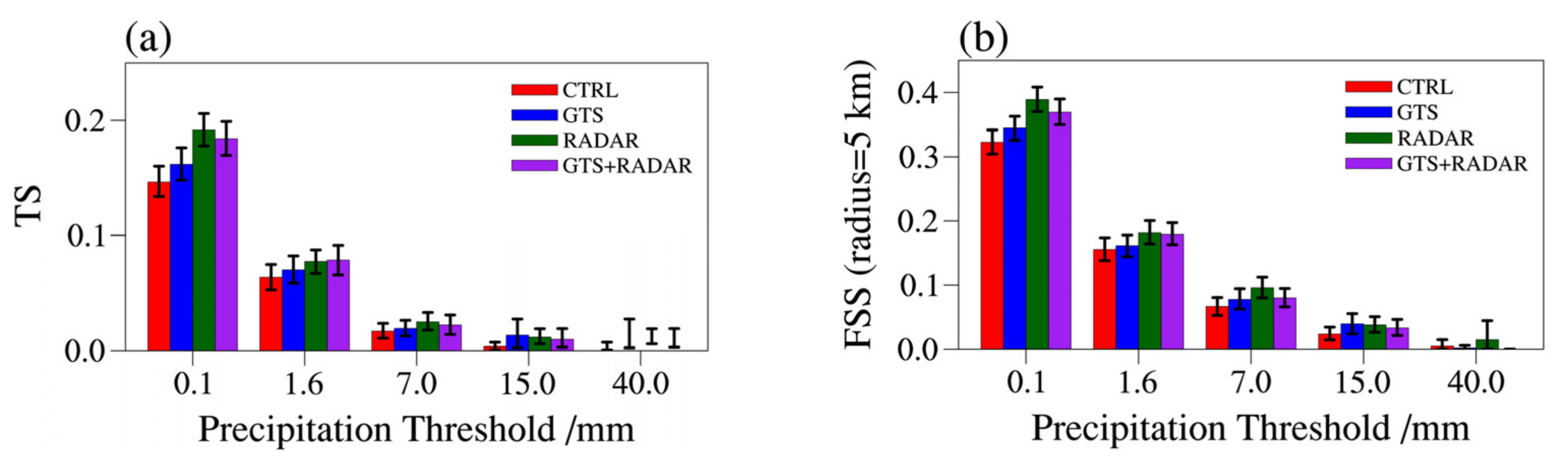
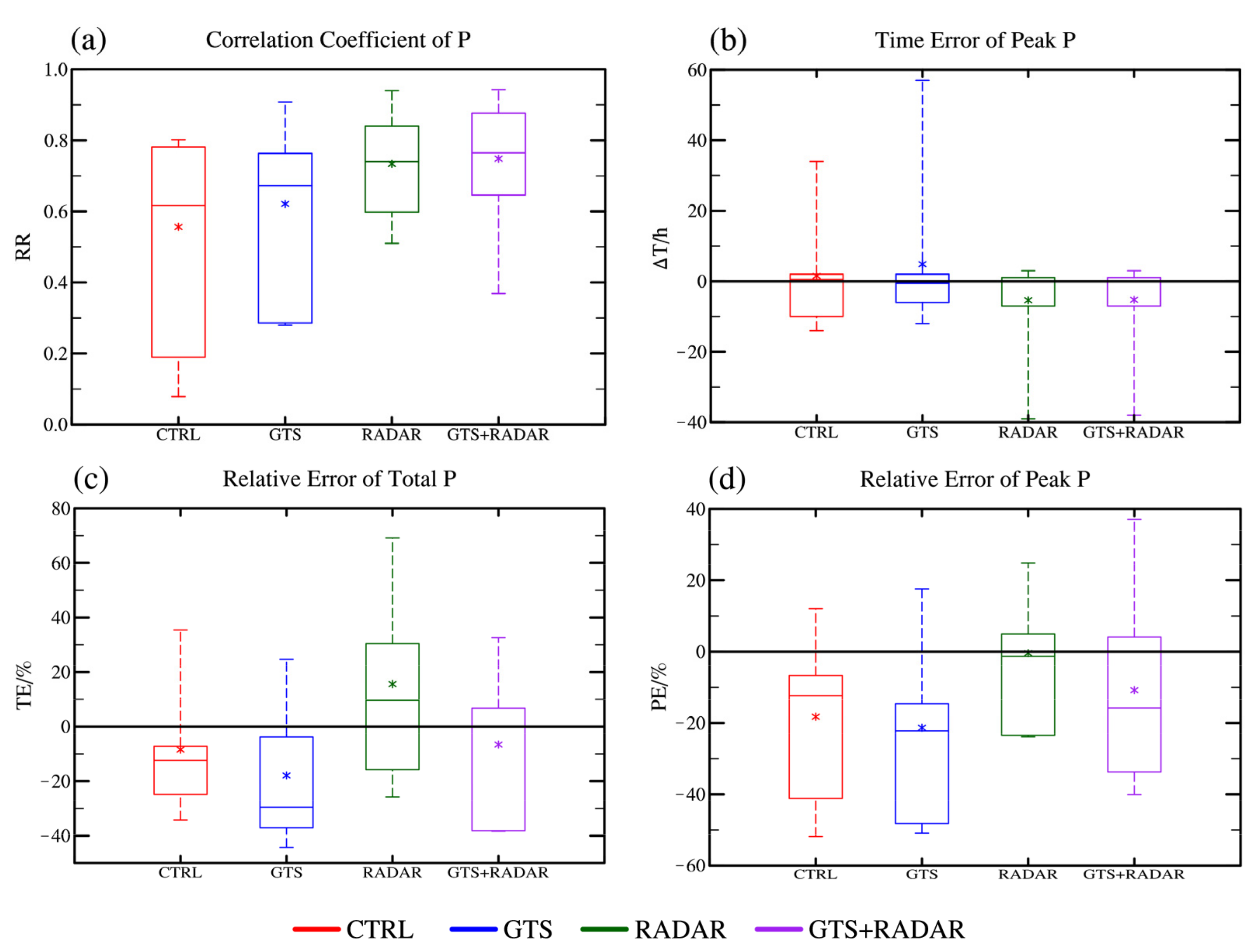
5.1.1. Evaluation of Rainfall
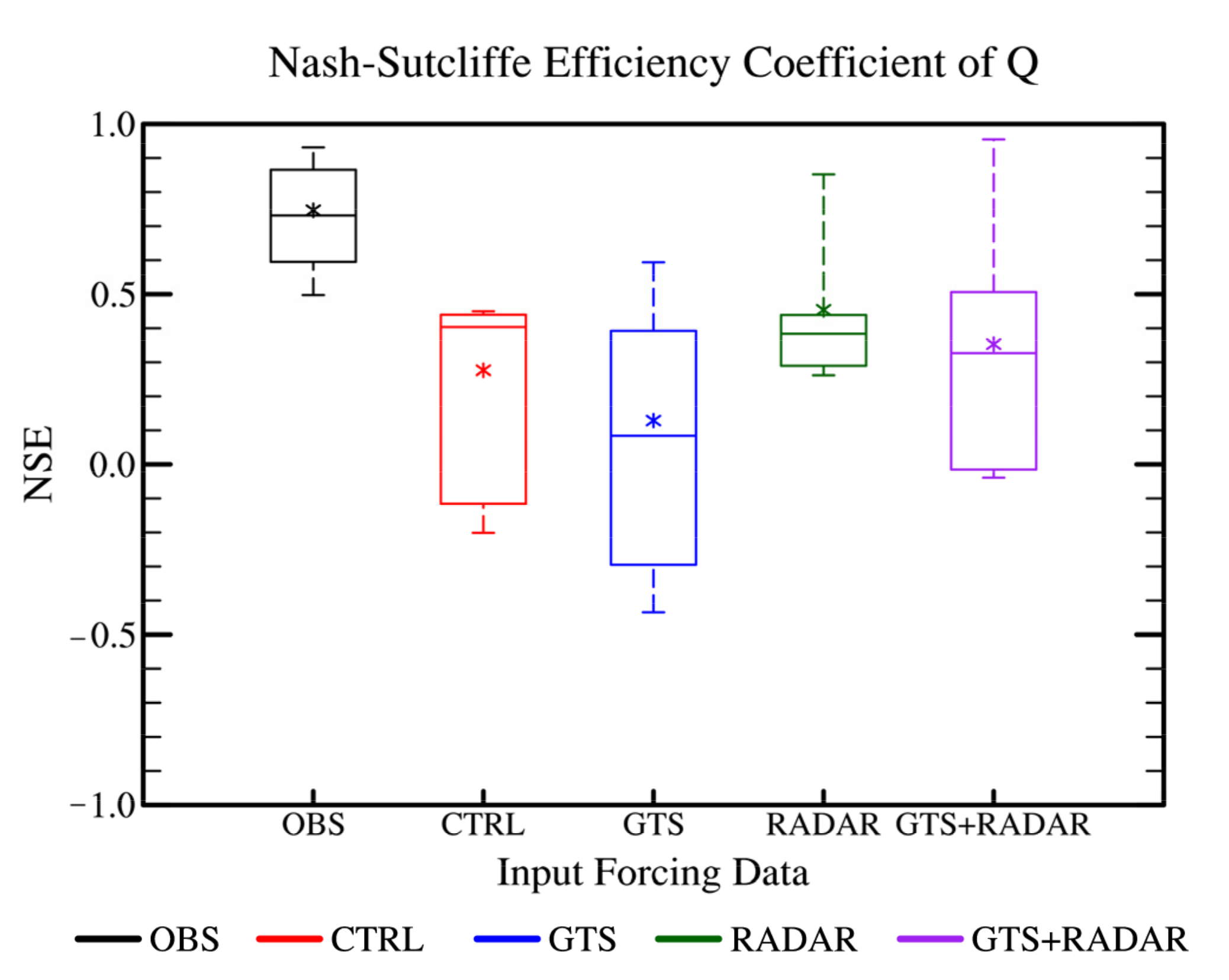
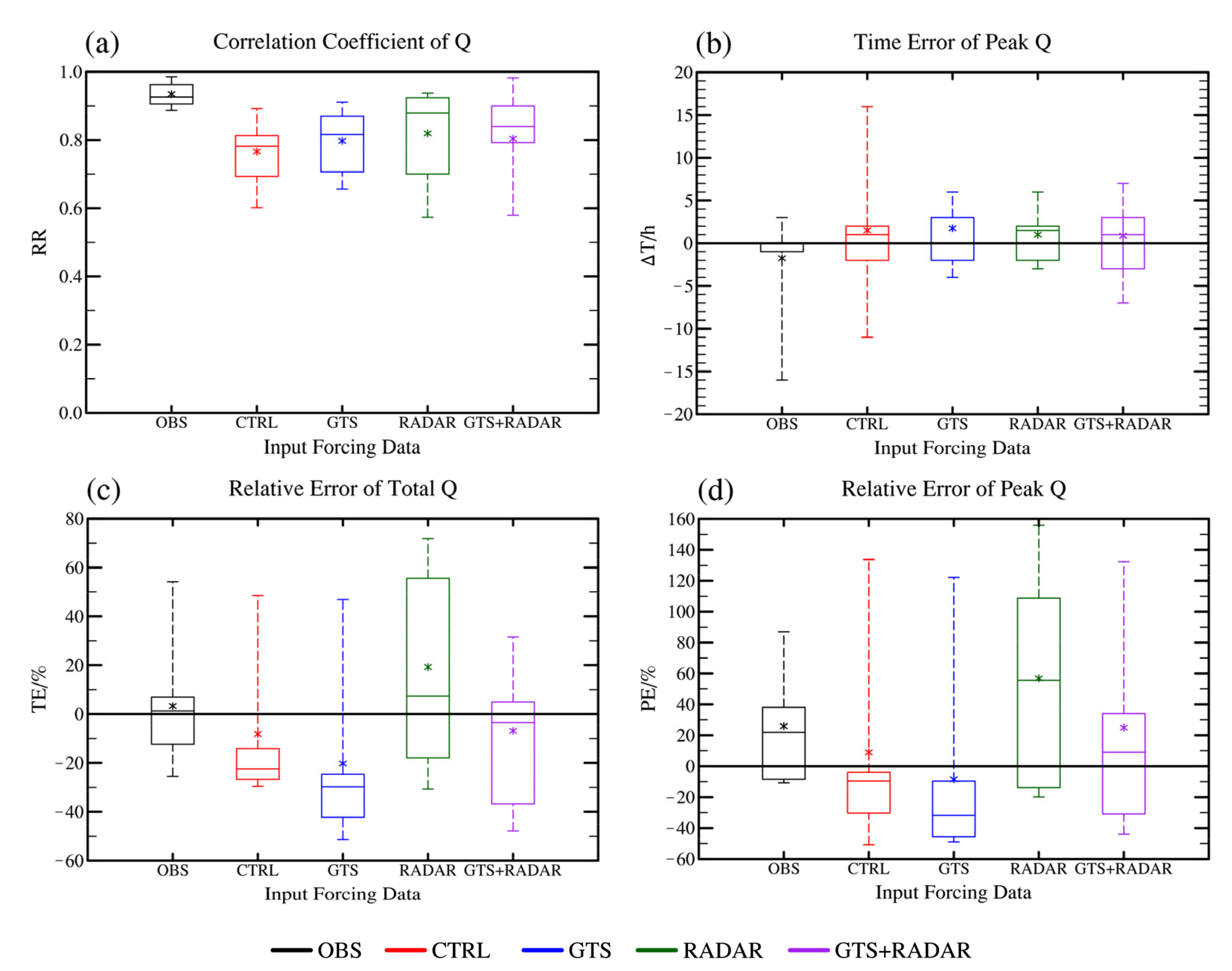
5.1.2. Evaluation of Streamflow
5.2. Diagnosis of Different Flood Events
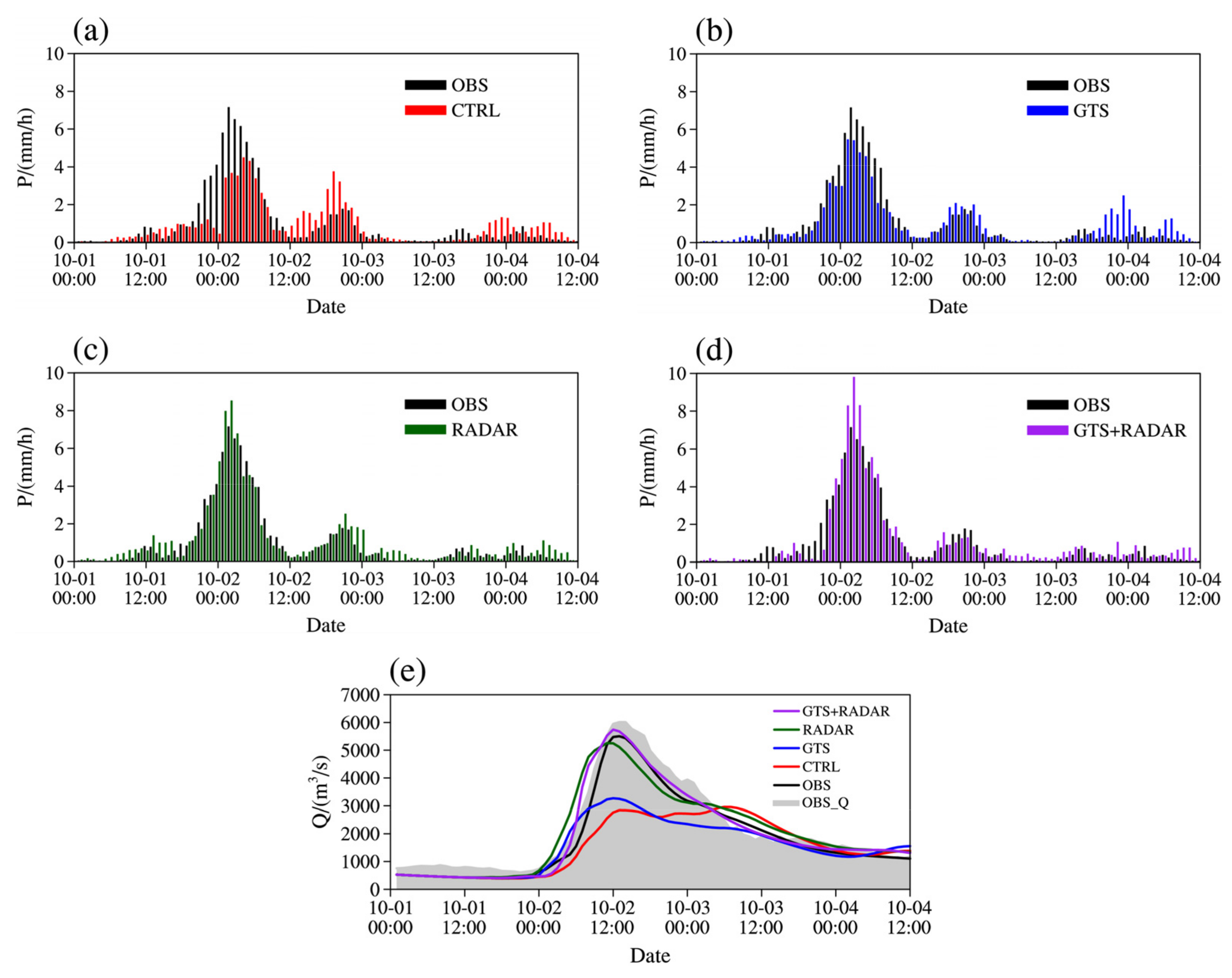
5.2.1. A Single-Peak Flood Event
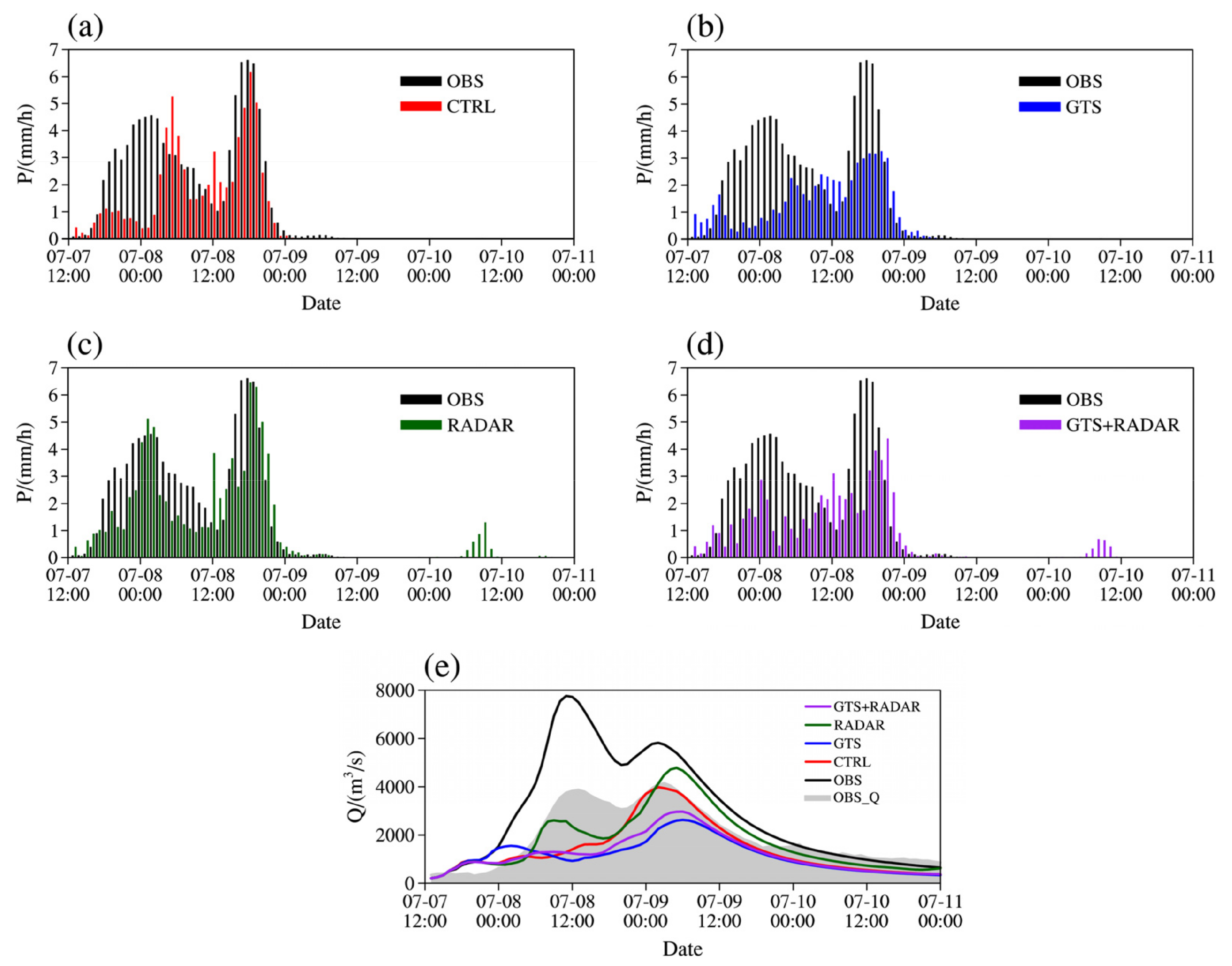
5.2.2. A Multi-Peak Flood Event
6. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moral, A.; Llasat, M.C.; Rigo, T. Connecting flash flood events with radar-derived convective storm characteristics on the northwestern Mediterranean coast: Knowing the present for better future scenarios adaptation. Atmos. Res. 2020, 238, 104863. [Google Scholar] [CrossRef]
- Belabid, N.; Zhao, F.; Brocca, L.; Huang, Y.; Tan, Y. Near-real-time flood forecasting based on satellite precipitation products. Remote Sens. 2019, 11, 252. [Google Scholar] [CrossRef] [Green Version]
- Salas, F.R.; Somos-Valenzuela, M.A.; Dugger, A.; Maidment, D.R.; Gochis, D.J.; David, C.H.; Yu, W.; Ding, D.; Clark, E.P.; Noman, N. Towards real-time continental scale streamflow simulation in continuous and discrete space. J. Am. Water. Resour. Assoc. 2018, 54, 7–27. [Google Scholar] [CrossRef]
- Ercolani, G.; Castelli, F. Variational assimilation of streamflow data in distributed flood forecasting. Water Resour. Res. 2017, 53, 158–183. [Google Scholar] [CrossRef] [Green Version]
- Zabel, F.; Mauser, W. 2-way coupling the hydrological land surface model PROMET with the regional climate model MM5. Hydrol. Earth Syst. Sci. 2013, 17, 1705–1714. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Li, J.; Xu, H. Improving flood forecasting capability of physically based distributed hydrological models by parameter optimization. Hydrol. Earth Syst. Sci. 2016, 20, 375–392. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Li, J.; Wang, H.; Qin, J.; Dong, L. Large-watershed flood forecasting with high-resolution distributed hydrological model. Hydrol. Earth Syst. Sci. 2017, 21, 735–749. [Google Scholar] [CrossRef] [Green Version]
- Sayama, T.; Yamada, M.; Sugawara, Y.; Yamazaki, D. Ensemble flash flood predictions using a high-resolution nationwide distributed rainfall-runoff model: Case study of the heavy rain event of July 2018 and Typhoon Hagibis in 2019. Prog. Earth Planet. Sci. 2020, 7, 1–18. [Google Scholar] [CrossRef]
- Gochis, D.J.; Barlage, M.; Dugger, A.; FitzGerald, K.; Karsten, L.; McAllister, M.; McCreight, J.; Mills, J.; RafieeiNasab, A.; Read, L.; et al. The WRF-Hydro Modeling System Technical Description, Version 5.0; NCAR Technical Note; NCAR: Boulder, CO, USA, 2018; p. 107. [Google Scholar]
- Arnault, J.; Wei, J.; Rummler, T.; Fersch, B.; Zhang, Z.; Jung, G.; Wagner, S.; Kunstmann, H. A joint soil-vegetation-atmospheric water tagging procedure with WRF-Hydro: Implementation and application to the case of precipitation partitioning in the upper Danube River Basin. Water Resour. Res. 2019, 55, 6217–6243. [Google Scholar] [CrossRef]
- Rummler, T.; Arnault, J.; Gochis, D.; Kunstmann, H. Role of lateral terrestrial water flow on the regional water cycle in a complex terrain region: Investigation with a fully coupled model system. J. Geophys. Res. Atmos. 2019, 124, 507–529. [Google Scholar] [CrossRef]
- Xiang, T.; Vivoni, E.R.; Gochis, D.J.; Mascaro, G. On the diurnal cycle of surface energy fluxes in the North American monsoon region using the WRF-Hydro modeling system: WRF-Hydro diurnal surface energy fluxes. J. Geophys. Res. Atmos. 2017, 122, 9024–9049. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, P.; Gao, S.; Fang, Z. Understanding the re-infiltration process to simulating streamflow in North Central Texas using the WRF-hydro modeling system. J. Hydrol. 2020, 587, 124902. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Li, C.; Yu, F.; Wang, W.; Qiu, Q. Parameter sensitivity analysis of the WRF-Hydro modeling system for streamflow simulation: A case study in semi-humid and semi-arid catchments of Northern China. Asia-Pac. J. Atmos. Sci. 2021, 57, 451–466. [Google Scholar] [CrossRef]
- Li, J.; Chen, Y.; Wang, H.; Qin, J.; Li, J.; Chiao, S. Extending flood forecasting lead time in large watershed by coupling WRF QPF with distributed hydrological model. Hydrol. Earth Syst. Sci. 2017, 21, 1279–1294. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Li, Z.; Yao, C.; Liu, Z.; Wang, J.; Hou, A.; Zhang, K.; Huo, W.; Liu, M. Evaluation of flood prediction capability of the WRF-Hydro model based on multiple forcing scenarios. Water 2020, 12, 874. [Google Scholar] [CrossRef] [Green Version]
- Lin, P.; Rajib, M.A.; Yang, Z.L.; Somos-Valenzuela, M.; Merwade, V.; Maidment, D.R.; Wang, Y.; Chen, L. Spatiotemporal evaluation of simulated evapotranspiration and streamflow over Texas using the WRF-Hydro-RAPID modeling framework. J. Am. Water Resour. Assoc. 2018, 54, 40–54. [Google Scholar] [CrossRef]
- Ming, X.; Liang, Q.; Xia, X.; Li, D.; Fowler, H.J. Real-time flood forecasting based on a high-performance 2D hydrodynamic model and numerical weather predictions. Water Resour. Res. 2020, 56, e2019WR025583. [Google Scholar] [CrossRef]
- Givati, A.; Gochis, D.; Rummler, T.; Kunstmann, H. Comparing one-way and two-way coupled hydrometeorological forecasting systems for flood forecasting in the Mediterranean region. Hydrology 2016, 3, 19. [Google Scholar] [CrossRef] [Green Version]
- Yi, L.; Zhang, W.; Li, X. Assessing hydrological modelling driven by different precipitation datasets via the SMAP soil moisture product and gauged streamflow data. Remote Sens. 2018, 10, 1872. [Google Scholar] [CrossRef] [Green Version]
- Ozkaya, A.; Akyurek, Z. WRF-Hydro model application in a data-scarce, small and topographically steepcatchment in Samsun, Turkey. Arab. J. Sci. Eng. 2020, 45, 3781–3798. [Google Scholar] [CrossRef]
- Li, L.; Gochis, D.J.; Sobolowksi, S.; Mesquita, M.D.S. Evaluating the present annual water budget of a Himalayan headwater river basin using a high-resolution atmosphere-hydrologymodel. J. Geophys. Res. Atmos. 2017, 122, 4786–4807. [Google Scholar] [CrossRef]
- Verri, G.; Pinardi, N.; Gochis, D.J.; Tribbia, J.; Navarra, A.; Coppini, G.; Vukicevic, T. A meteo-hydrological modelling system for the reconstruction of river runoff: The case of the Ofanto river catchment. Nat. Hazards Earth Syst. Sci. 2017, 17, 1741–1761. [Google Scholar] [CrossRef] [Green Version]
- Chandrasekar, R.; Balaji, C. Impact of physics parameterization and 3DVAR data assimilation on prediction of tropical cyclones in the Bay of Bengal region. Nat. Hazards 2016, 80, 223–247. [Google Scholar] [CrossRef]
- Lagasio, M.; Silvestro, F.; Campo, L.; Parodi, A. Predictive capability of a high-resolution hydrometeorological forecasting framework coupling WRF cycling 3DVAR and continuum. J. Hydrometeorol. 2019, 20, 1307–1337. [Google Scholar] [CrossRef]
- Mazzarella, V.; Maiello, I.; Ferretti, R.; Capozzi, V.; Picciotti, E.; Alberoni, P.P.; Marzano, F.S.; Budilon, G. Reflectivity and velocity radar data assimilation for two flash flood events in central Italy: A comparison between 3D and 4D variational methods. Q. J. R. Meteorol. Soc. 2020, 146, 348–366. [Google Scholar] [CrossRef]
- Srinivas, C.V.; Yesubabu, V.; Hari Prasad, K.B.R.R.; Venkatraman, B.; Ramakrishna, S.S.V.S. Numerical simulation of cyclonic storms fanoos, nargis with assimilation of conventional and satellite observations using 3DVAR. Nat. Hazards 2012, 63, 867–889. [Google Scholar] [CrossRef]
- Srinivas, C.V.; Yesubabu, V.; Venkatesan, R.; Ramakrishna, S.S.V.S. Impact of assimilation of conventional and satellite meteorological observations on the numerical simulation of a Bay of Bengal Tropical Cyclone of November 2008 near Tamilnadu using WRF model. Meteorol. Atmos. Phys. 2010, 110, 19–44. [Google Scholar] [CrossRef]
- Fortin, V.; Roy, G.; Donaldson, N.; Mahidjiba, A. Assimilation of radar quantitative precipitation estimations in the Canadian Precipitation Analysis (CaPA). J. Hydrol. 2015, 531, 296–307. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, Y.; Xu, M.; Liu, Y.; Pan, L.; Wang, H.; Cheng, W.Y.Y.; Jiang, Y.; Lan, H.; Yang, H.; et al. Forecasting severe convective storms with WRF-based RTFDDA radar data assimilation in Guangdong, China. Atmos. Res. 2018, 209, 131–143. [Google Scholar] [CrossRef]
- Liu, C.; Xue, M.; Kong, R. Direct assimilation of radar reflectivity data using 3DVAR: Treatment of hydrometeor background errors and OSSE tests. Mon. Weather Rev. 2019, 147, 17–29. [Google Scholar] [CrossRef]
- Lorenc, A.C. Analysis methods for numerical weather prediction. Q. J. R. Meteorol. Soc. 1986, 112, 1177–1194. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling, Data Assimilation and Predictability; Cambridge University Press: Cambridge, UK, 2002; p. 342. [Google Scholar]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s spectral statisticalinterpolation analysis system. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Descombes, G.; Auligné, T.; Vandenberghe, F.; Barker, D.M.; Barré, J. Generalized background error covariance matrix model (GEN_BE v2.0). Geosci. Model Dev. 2015, 8, 669–696. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Liu, L.P. A test pattern identification algorithm and its application to CINRAD)/SA(B). Adv. Atoms. Sci. 2014, 31, 331–343. [Google Scholar] [CrossRef]
- Xu, Q.; Jiang, Y.; Liu, L.P. Fitting parametric vortices to aliased Doppler velocities scanned from hurricanes. Mon. Weather Rev. 2012, 142, 94–106. [Google Scholar] [CrossRef]
- Chen, H.Q.; Chen, Y.D.; Gao, J.D.; Sun, T.; Carlin, J. A radar reflectivity data assimilation method based on background-dependent hydrometeor retrieval: An observing system simulation experiment. Atmos. Res. 2020, 243, 105022. [Google Scholar] [CrossRef]
- Chen, H.Q.; Gao, J.D.; Wang, Y.H.; Chen, Y.D.; Sun, T.; Carlin, J.; Zheng, Y. Radar reflectivity data assimilation method based on background-dependent hydrometeor retrieval: Comparison with direct assimilation for real cases. Q. J. R. Meteorol. Soc. 2021, 147, 2409–2428. [Google Scholar] [CrossRef]
- Sun, J.Z. Convective-scale assimilation of radar data: Progress and challenges. Q. J. R. Meteorol. Soc. 2005, 131, 3439–3463. [Google Scholar] [CrossRef]
- Gao, J.D.; Stensrud, D.J. Assimilation of reflectivity data in a convective-scale, cycled 3DVAR framework with hydrometeor classification. J. Atmos. Sci. 2012, 69, 1054–1065. [Google Scholar] [CrossRef]
- Radhakrishnan, C.; Chandrasekar, V. CASA prediction system over Dallas–Fort Worth urban network: Blending of nowcasting and high-resolution Numerical Weather Prediction model. J. Atmos. Ocean. Tech. 2020, 37, 211–228. [Google Scholar] [CrossRef]
- Dowell, D.C.; Wicker, L.J.; Snyder, C. Ensemble Kalman filter assimilation of radar observations of the 8 May 2003 Oklahoma City supercell: Influences of reflectivity observations on storm-scale analyses. Mon. Weather Rev. 2011, 139, 272–294. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.L.; Farley, R.D.; Orville, H.D. Bulk parameterization of the snow field in a cloud model. J. Clim. Appl. Meteorol. Climatol. 1983, 22, 1065–1092. [Google Scholar] [CrossRef] [Green Version]
- Gilmore, M.S.; Straka, J.M.; Rasmussen, E.N. Precipitation and evolution sensitivity in simulated deep convective storms: Comparisons between liquid-only and simple ice and liquid phase microphysics. Mon. Weather Rev. 2004, 132, 1897–1916. [Google Scholar] [CrossRef]
- Smith, P.L.; Myers, C.G.; Orville, H.D. Radar reflectivity factor calculations in numerical cloud models using bulk parameterization of precipitation. J. Appl. Meteorol. 1975, 14, 1156–1165. [Google Scholar] [CrossRef] [Green Version]
- Gunn, K.L.S.; Marshall, J.S. The distribution with size of aggregate snowflakes. J. Meteorol. 1958, 15, 452–461. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Sun, J.; Fan, S.; Huang, X. Indirect Assimilation of Radar Reflectivity with WRF 3D-Var and Its Impact on Prediction of Four Summertime Convective Events. J. Appl. Meteorol. Climatol. 2013, 52, 889–902. [Google Scholar] [CrossRef]
- Senatore, A.; Mendicino, G.; Gochis, D.J.; Yu, W.; Yates, D.N.; Kunstmann, H. Fully coupled atmosphere-hydrology simulations for the central Mediterranean: Impact of enhanced hydrological parameterization for short and long time scales. J. Adv. Model. Earth Syst. 2015, 7, 1693–1715. [Google Scholar] [CrossRef]
- Arnault, J.; Rummler, T.; Baur, F.; Lerch, B.; Wagner, S.; Fersch, B.; Zhang, Z.; Kerandi, N.; Keil, C.; Kunstmann, H. Precipitation sensitivity to the uncertainty of terrestrial water flow in WRF-Hydro: An ensemble analysis for central Europe. J. Hydrometeorol. 2018, 19, 1007–1025. [Google Scholar] [CrossRef]
- Arnault, J.; Wagner, S.; Rummler, T.; Fersch, B.; Bliefernicht, J.; Andresen, S.; Kunstmann, H. Role of runoff-infiltration partitioning and resolved overland flow on land-atmosphere feedbacks: A case-study with the WRF-Hydro coupled modeling system for West Africa. J. Hydrometeorol. 2015, 17, 1489–1516. [Google Scholar] [CrossRef]
- Ryu, Y.; Lim, Y.J.; Ji, H.S.; Park, H.H.; Chang, E.C.; Kim, B.J. Applying a coupled hydrometeorological simulation system to flash flood forecasting over the Korean Peninsula. Asia-Pac. J. Atmos. Sci. 2017, 53, 421–430. [Google Scholar] [CrossRef]
- Chen, Y.D.; Yu, Z.; Han, W.; He, J.; Chen, M. Case study of a retrieval method of 3D proxy reflectivity from FY-4A lightning data and its impact on the assimilation and forecasting for severe rainfall storms. Remote Sens. 2020, 12, 1165. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.B.; Chen, Y.D.; Min, J. Impact of assimilating China Precipitation Analysis data merging with remote sensing products using the 4DVar method on the prediction of heavy rainfall. Remote Sens. 2019, 11, 973. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.Z.; Wang, H.L.; Tong, W.X.; Zhang, Y.; Lin, C.; Xu, D.M. Comparison of the impacts of momentum control variables on high-resolution variational data assimilation and precipitation forecasting. Mon. Weather Rev. 2016, 144, 149–169. [Google Scholar] [CrossRef]
- Shen, Y.; Zhao, P.; Pan, Y.; Yu, J. A high spatiotemporal gauge-satellite merged precipitation analysis over China. J. Geophys. Res. Atmos. 2014, 119, 3063–3075. [Google Scholar] [CrossRef]
- Kerandi, N.; Arnault, J.; Laux, P.; Wagner, S.; Kitheka, J.; Kunstmann, H. Joint atmospheric-terrestrial water balances for East Africa: A WRF-Hydro case study for the upper Tana River basin. Theor. Appl. Climatol. 2017, 131, 1337–1355. [Google Scholar] [CrossRef] [Green Version]
- Naabil, E.; Lamptey, B.L.; Arnault, J.; Olufayo, A.; Kunstmann, H. Water resources management using the WRF-Hydro modelling system: Case-study of the Tono dam in West Africa. J. Hydrol. Reg. Stud. 2017, 12, 196–209. [Google Scholar] [CrossRef]
- Yucel, I.; Onen, A.; Yilmaz, K.K.; Gochis, D.J. Calibration and evaluation of a flood forecasting system: Utility of numerical weather prediction model, data assimilation and satellite-based rainfall. J. Hydrol. 2015, 523, 49–66. [Google Scholar] [CrossRef] [Green Version]
- Gao, S.; Huang, D. Assimilating conventional and Doppler radar data with a hybrid approach to improve forecasting of a convective system. Atmosphere 2017, 8, 188. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Name | Assimilation Scheme |
|---|---|
| CTRL | No assimilation |
| GTS | GTS conventional observations |
| RADAR | Radar radial velocity and reflectivity |
| GTS + RADAR | GTS conventional observations + Radar radial velocity and reflectivity |
| Flood ID | Start Date | End Date | Peak Flow/m3 s−1 | |
|---|---|---|---|---|
| 20150531 | 12:00 31-05-2015 | 12:00 03-06-2015 | 2564.2 | |
| 20150629 | 12:00 29-06-2015 | 00:00 02-07-2015 | 2845 | |
| 20160624 | 00:00 24-06-2016 | 12:00 29-06-2016 | 4847 | |
| 20160630 | 00:00 30-06-2016 | 00:00 03-07-2016 | 5826.9 | |
| Calibration | 20160718 | 00:00 18-07-2016 | 00:00 22-07-2016 | 12320 |
| 20170609 | 00:00 09-06-2017 | 00:00 15-06-2017 | 2122.7 | |
| 20170707 | 12:00 07-07-2017 | 00:00 11-07-2017 | 4152.4 | |
| 20170713 | 12:00 13-07-2017 | 12:00 17-07-2017 | 4005.8 | |
| 20171001 | 00:00 01-10-2017 | 12:00 04-10-2017 | 6013.9 | |
| 20171011 | 00:00 11-10-2017 | 00:00 15-10-2017 | 2708.7 | |
| 20180505 | 00:00 05-05-2018 | 00:00 09-05-2018 | 2531 | |
| Validation | 20180530 | 00:00 30-05-2018 | 00:00 02-06-2018 | 1409.1 |
| 20180703 | 00:00 03-07-2018 | 00:00 08-07-2018 | 2079 |
| Parameter | REFKDT | MannN | RETDEPRTFAC | OVROUGHRTFAC |
|---|---|---|---|---|
| Lower | 0 | 0.1 | 1 | 0.5 |
| Upper | 0.5 | 1 | 10 | 5 |
| Increment | 0.05 | 0.1 | 1 | 0.5 |
| Flood ID | RR | PE/% | TE/% | NSE | ΔT/h | |
|---|---|---|---|---|---|---|
| 20150531 | 0.98 | 3.41 | −24.11 | 0.79 | 1 | |
| 20150629 | 0.96 | 60.31 | 27.30 | 0.69 | 1 | |
| 20160624 | 0.89 | −3.86 | 12.78 | 0.75 | 2 | |
| 20160630 | 0.97 | −9.04 | 7.68 | 0.92 | 1 | |
| Calibration | 20160718 | 0.97 | 1.20 | 2.46 | 0.94 | 2 |
| 20170609 | 0.91 | 64.89 | 11.55 | 0.73 | −1 | |
| 20170707 | 0.94 | 40.25 | 54.14 | 0.59 | −16 | |
| 20170713 | 0.89 | 38.10 | 2.83 | 0.74 | 0 | |
| 20171001 | 0.99 | −8.46 | −12.34 | 0.93 | −1 | |
| 20171011 | 0.96 | −7.24 | −0.26 | 0.91 | 3 | |
| 20180505 | 0.98 | 9.43 | −10.93 | 0.87 | −1 | |
| Validation | 20180530 | 0.91 | −10.78 | −25.51 | 0.50 | 3 |
| 20180703 | 0.91 | 34.42 | 6.92 | 0.71 | −1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, T.; Chen, Y.; Gao, Y.; Qin, L.; Wu, Y.; Wu, Y. Improved Streamflow Forecast in a Small-Medium Sized River Basin with Coupled WRF and WRF-Hydro: Effects of Radar Data Assimilation. Remote Sens. 2021, 13, 3251. https://doi.org/10.3390/rs13163251
Gu T, Chen Y, Gao Y, Qin L, Wu Y, Wu Y. Improved Streamflow Forecast in a Small-Medium Sized River Basin with Coupled WRF and WRF-Hydro: Effects of Radar Data Assimilation. Remote Sensing. 2021; 13(16):3251. https://doi.org/10.3390/rs13163251
Chicago/Turabian StyleGu, Tianwei, Yaodeng Chen, Yufang Gao, Luyao Qin, Yuqing Wu, and Yazhen Wu. 2021. "Improved Streamflow Forecast in a Small-Medium Sized River Basin with Coupled WRF and WRF-Hydro: Effects of Radar Data Assimilation" Remote Sensing 13, no. 16: 3251. https://doi.org/10.3390/rs13163251
APA StyleGu, T., Chen, Y., Gao, Y., Qin, L., Wu, Y., & Wu, Y. (2021). Improved Streamflow Forecast in a Small-Medium Sized River Basin with Coupled WRF and WRF-Hydro: Effects of Radar Data Assimilation. Remote Sensing, 13(16), 3251. https://doi.org/10.3390/rs13163251