
A Spatio-Temporal Brightness Temperature Prediction Method for Forest Fire Detection with MODIS Data: A Case Study in San Diego

Abstract
:
1. Introduction
2. Materials
2.1. Study Area
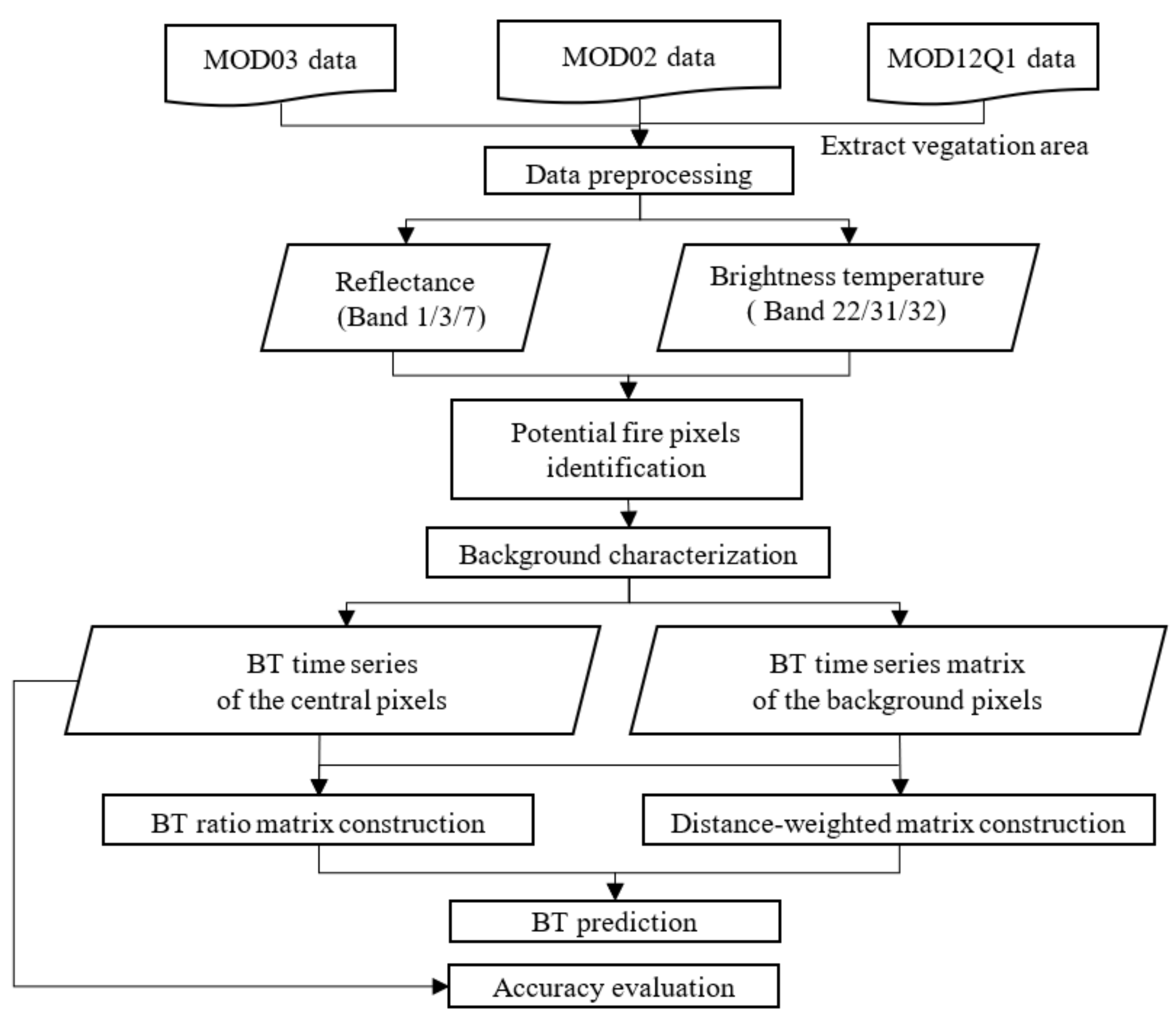
2.2. Data and Data Preprocessing
3. Methods
3.1. Overview of the Existing Algorithms
3.1.1. Contextual Model (CM)
3.1.2. Temporal-Contextual Model (TCM)
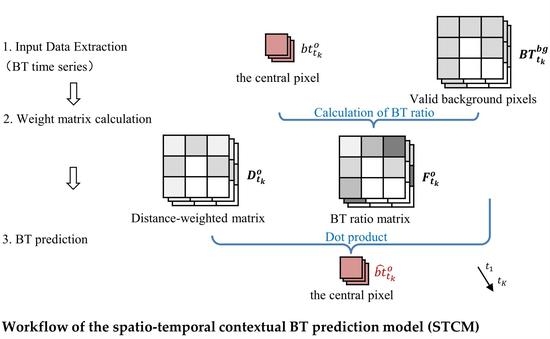
3.2. Spatio-Temporal Contextual Model (STCM)
3.2.1. Input Data Extraction
3.2.2. Weight Matrix Calculation
BT Ratio Matrix Construction
Distance-Weighted Matrix Construction
3.2.3. BT Prediction
3.3. Statistical Analysis
Pearson Correlation Coefficient (PCC)
- a.
- Kendall’s Coefficient (τ) of Rank Correlation
- b.
- Root–Mean–Square Error (RMSE)
- c.
- Bias
4. Results
4.1. RMSE of the Predicted BT
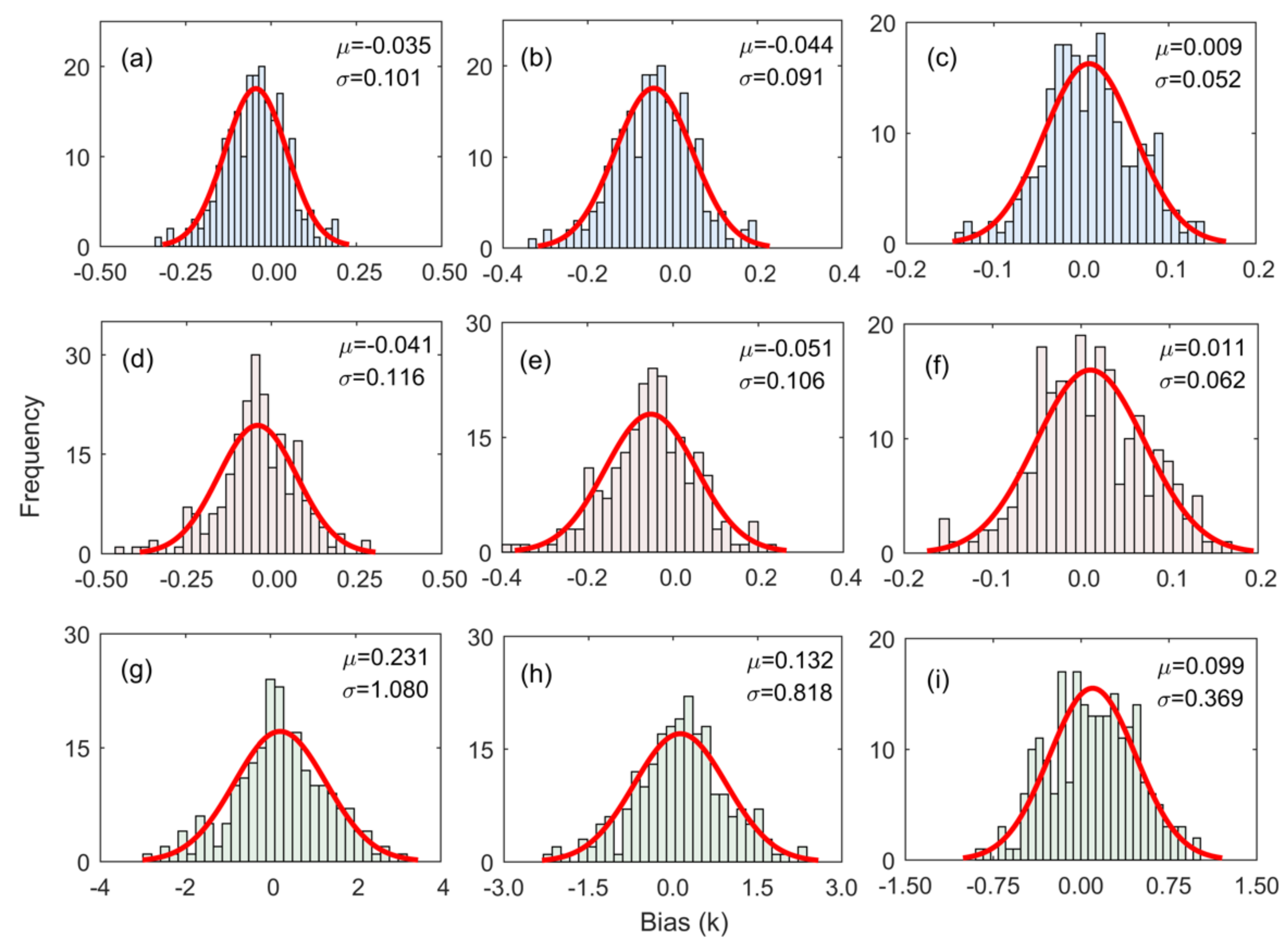
4.2. Bias Analysis
5. Discussion
5.1. The Influence of Parameter Selection on the Accuracy of STCM
5.2. Application of STCM
5.3. Advantages and Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wright, R.; Flynn, L.; Garbeil, H.; Harris, A.; Pilger, E. Automated volcanic eruption detection using MODIS. Remote Sens. Environ. 2002, 82, 135–155. [Google Scholar] [CrossRef] [Green Version]
- Ardakani, A.S.; Zoej, M.J.V.; Mohammadzadeh, A.; Mansourian, A. Spatial and temporal analysis of fires detected by MODIS data in northern Iran from 2001 to 2008. IEEE J. Sel. Topics Appl. Earth Observ. Remote Sens. 2010, 4, 216–225. [Google Scholar] [CrossRef]
- Mazzeo, G.; Marchese, F.; Filizzola, C.; Pergola, N.; Tramutoli, V. A Multi-temporal Robust Satellite Technique (RST) for forest fire detection. In Proceedings of the 2007 International Workshop on the Analysis of Multi-temporal Remote Sensing Images, Leuven, Belgium, 18–20 July 2007; pp. 1–6. [Google Scholar]
- Ya’acob, N.; Najib, M.S.M.; Tajudin, N.; Yusof, A.L.; Kassim, M. Image processing based forest fire detection using infrared camera. J. Phys. Conf. Ser. 2021, 1768, 012014. [Google Scholar] [CrossRef]
- Piñol, J.; Terradas, J.; Lloret, F. Climate warming, wildfire hazard, and wildfire occurrence in coastal eastern Spain. Clim. Chang. 1998, 38, 345–357. [Google Scholar] [CrossRef]
- Pierce, J.; Meyer, G. Long-term fire history from alluvial fan sediments: The role of drought and climate variability, and implications for management of Rocky Mountain forests. Int. J. Wildland Fire 2008, 17, 84–95. [Google Scholar] [CrossRef] [Green Version]
- Running, S.W. Is global warming causing more, larger wildfires? Science 2006, 313, 927–928. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.-D.; Miao, L.; Peng, G.-X. An improved algorithm for forest fire detection using HJ data. Procedia Environ. Sci. 2012, 13, 140–150. [Google Scholar] [CrossRef] [Green Version]
- Tomlinson, C.J.; Chapman, L.; Thornes, J.E.; Baker, C. Remote sensing land surface temperature for meteorology and climatology: A review. Meteorol. Appl. 2011, 18, 296–306. [Google Scholar] [CrossRef] [Green Version]
- Giglio, L.; Descloitres, J.; Justice, C.O.; Kaufman, Y.J. An enhanced contextual fire detection algorithm for MODIS. Remote Sens. Environ. 2003, 87, 273–282. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Van der Werf, G.R.; Randerson, J.T.; Giglio, L.; Collatz, G.; Mu, M.; Kasibhatla, P.S.; Morton, D.C.; DeFries, R.; Jin, Y.v.; van Leeuwen, T.T. Global fire emissions and the contribution of deforestation, savanna, forest, agricultural, and peat fires (1997–2009). Atmos. Chem. Phys. 2010, 10, 11707–11735. [Google Scholar] [CrossRef] [Green Version]
- Roy, D.P.; Frost, P.; Justice, C.; Landmann, T.; Le Roux, J.; Gumbo, K.; Makungwa, S.; Dunham, K.; Du Toit, R.; Mhwandagara, K. The Southern Africa Fire Network (SAFNet) regional burned-area product-validation protocol. Int. J. Remote Sens. 2005, 26, 4265–4292. [Google Scholar] [CrossRef]
- Mouillot, F.; Schultz, M.G.; Yue, C.; Cadule, P.; Tansey, K.; Ciais, P.; Chuvieco, E. Ten years of global burned area products from spaceborne remote sensing—A review: Analysis of user needs and recommendations for future developments. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 64–79. [Google Scholar] [CrossRef] [Green Version]
- Boschetti, L.; Roy, D.P.; Justice, C.O.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar] [CrossRef]
- Fu, Y.; Li, R.; Wang, X.; Bergeron, Y.; Valeria, O.; Chavardès, R.D.; Wang, Y.; Hu, J. Fire detection and fire radiative power in forests and low-biomass lands in Northeast Asia: MODIS versus VIIRS fire products. Remote Sens. 2020, 12, 2870. [Google Scholar] [CrossRef]
- Flasse, S.; Ceccato, P. A contextual algorithm for AVHRR fire detection. Int. J. Remote Sens. 1996, 17, 419–424. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amraoui, M.; DaCamara, C.; Pereira, J. Detection and monitoring of African vegetation fires using MSG-SEVIRI imagery. Remote Sens. Environ. 2010, 114, 1038–1052. [Google Scholar] [CrossRef]
- Csiszar, I.; Schroeder, W.; Giglio, L.; Ellicott, E.; Vadrevu, K.P.; Justice, C.O.; Wind, B. Active fires from the Suomi NPP Visible Infrared Imaging Radiometer Suite: Product status and first evaluation results. J. Geophys. Res. Atmos. 2014, 119, 803–816. [Google Scholar] [CrossRef]
- Wooster, M.J.; Xu, W.; Nightingale, T. Sentinel-3 SLSTR active fire detection and FRP product: Pre-launch algorithm development and performance evaluation using MODIS and ASTER datasets. Remote Sens. Environ. 2012, 120, 236–254. [Google Scholar] [CrossRef]
- Bechtel, B. Robustness of annual cycle parameters to characterize the urban thermal landscapes. IEEE Geosci. Remote. Sens. Lett. 2012, 9, 876–880. [Google Scholar] [CrossRef]
- Laneve, G.; Castronuovo, M.M.; Cadau, E.G. Continuous monitoring of forest fires in the Mediterranean area using MSG. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2761–2768. [Google Scholar] [CrossRef]
- Roberts, G.; Wooster, M. Development of a multi-temporal Kalman filter approach to geostationary active fire detection & fire radiative power (FRP) estimation. Remote Sens. Environ. 2014, 152, 392–412. [Google Scholar]
- Su, Y.R. MODIS forest detection method using mixed pixel decomposition. Bachelor’s Thesis, Beijing Normal University, Beijing, China, 2015. [Google Scholar]
- Pavlidou, E.; van der Meijde, M.; van der Werff, H.; Hecker, C. Finding a needle by removing the haystack: A spatio-temporal normalization method for geophysical data. Comput Geosci. 2016, 90, 78–86. [Google Scholar] [CrossRef]
- Lin, L.; Meng, Y.; Yue, A.; Yuan, Y.; Liu, X.; Chen, J.; Zhang, M.; Chen, J. A spatio-temporal model for forest fire detection using HJ-IRS satellite data. Remote Sens. 2016, 8, 403. [Google Scholar] [CrossRef] [Green Version]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World map of the Köppen-Geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]
- Pugnaire, F.; Valladares, F. Functional Plant Ecology; CRC Press: Boca Raton, FL, USA, 2007. [Google Scholar]
- Wan, Z. MODIS Level 1B Algorithm Theoretical Basis Document. Institute for Computational Earth System Science, University of California: Santa Barbara, CA, USA, 1999. [Google Scholar]
- Sabins, F.F. Remote Sensing: Principles and Applications; Waveland Press: Long Grove, IL, USA, 2007. [Google Scholar]
- Qin, Z.; Gao, M.; Qin, X. Methodology to inverse land surface temperature from MODIS data for agricultural drought monitoring in China. J. Nat. Disaster Sci. 2005, 14, 64. [Google Scholar]
- Stroppiana, D.; Pinnock, S.; Gregoire, J.-M. The global fire product: Daily fire occurrence from April 1992 to December 1993 derived from NOAA AVHRR data. Int. J. Remote Sens. 2000, 21, 1279–1288. [Google Scholar] [CrossRef]
- Zhan, H.; Xie, W.; Sun, H.; Huang, H. Using ENVI-met to simulate 3D temperature distribution in vegetated scenes. J. Beijing For. Univ. 2014, 36, 64–74. [Google Scholar]
- Zhang, F.C.; Sun, X.G. Application of inverse distance weighted interpolation method in finite temperature point temperature field. Appl. Mech. Mater 2014, 599, 1268–1271. [Google Scholar]
- Kendall, M.G.; Kendall, S.F.; Smith, B.B. The distribution of Spearman’s coefficient of rank correlation in a universe in which all rankings occur an equal number of times. Biometrika 1939, 30, 251–273. [Google Scholar]
- Hyndman, R.J.; Koehler, A.B. Another look at measures of forecast accuracy. Int. J. Forecast. 2006, 22, 679–688. [Google Scholar] [CrossRef] [Green Version]
- Weng, Q.; Fu, P.; Gao, F. Generating daily land surface temperature at Landsat resolution by fusing Landsat and MODIS data. Remote Sens. Environ. 2014, 145, 55–67. [Google Scholar] [CrossRef]
- Bechtel, B.; Daneke, C. Classification of local climate zones based on multiple earth observation data. IEEE J. Sel. Topics Appl. Earth Observ. 2012, 5, 1191–1202. [Google Scholar] [CrossRef]
- Weng, Q.; Lu, D.; Schubring, J. Estimation of land surface temperature–vegetation abundance relationship for urban heat island studies. Remote Sens. Environ. 2004, 89, 467–483. [Google Scholar] [CrossRef]
- Weng, Q.; Liu, H.; Liang, B.; Lu, D. The spatial variations of urban land surface temperatures: Pertinent factors, zoning effect, and seasonal variability. IEEE J. Sel. Topics Appl. Earth Observ. 2008, 1, 154–166. [Google Scholar] [CrossRef]
- Lemmetyinen, J.; Derksen, C.; Pulliainen, J.; Strapp, W.; Toose, P.; Walker, A.; Tauriainen, S.; Pihlflyckt, J.; Karna, J.-P.; Hallikainen, M.T. A comparison of airborne microwave brightness temperatures and snowpack properties across the boreal forests of Finland and Western Canada. IEEE Trans. Geosci. Remote Sens. 2009, 47, 965–978. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band (Central Wavelength/μm) | Physical Quantity | Application |
|---|---|---|
| 1 (0.65) | reflectance | Cloud masking |
| 2 (0.86) | reflectance | Cloud masking |
| 7 (2.13) | reflectance | Cloud masking |
| 22 (4.0) | BT | BT prediction |
| 31 (11.0) | BT | BT prediction, Cloud masking |
| 32 (12.0) | BT | Cloud masking |

| Model | Mean | Maximum | Minimum | Standard Deviation | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Band | 22 | 31 | D | 22 | 31 | D | 22 | 31 | D | 22 | 31 | D |
| CM | 1.74 | 1.71 | 1.01 | 3.85 | 4.39 | 2.27 | 0.87 | 0.72 | 0.24 | 0.55 | 0.90 | 0.63 |
| TCM | 1.57 | 1.65 | 1.03 | 3.67 | 4.24 | 2.27 | 1.02 | 0.80 | 0.41 | 0.59 | 0.95 | 0.63 |
| STCM | 1.43 | 1.49 | 0.94 | 3.20 | 3.80 | 2.08 | 0.91 | 0.76 | 0.40 | 0.47 | 0.82 | 0.55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, A.; Li, J.; Chen, Y. A Spatio-Temporal Brightness Temperature Prediction Method for Forest Fire Detection with MODIS Data: A Case Study in San Diego. Remote Sens. 2021, 13, 2900. https://doi.org/10.3390/rs13152900
Gong A, Li J, Chen Y. A Spatio-Temporal Brightness Temperature Prediction Method for Forest Fire Detection with MODIS Data: A Case Study in San Diego. Remote Sensing. 2021; 13(15):2900. https://doi.org/10.3390/rs13152900
Chicago/Turabian StyleGong, Adu, Jing Li, and Yanling Chen. 2021. "A Spatio-Temporal Brightness Temperature Prediction Method for Forest Fire Detection with MODIS Data: A Case Study in San Diego" Remote Sensing 13, no. 15: 2900. https://doi.org/10.3390/rs13152900
APA StyleGong, A., Li, J., & Chen, Y. (2021). A Spatio-Temporal Brightness Temperature Prediction Method for Forest Fire Detection with MODIS Data: A Case Study in San Diego. Remote Sensing, 13(15), 2900. https://doi.org/10.3390/rs13152900