
A GPR-Based Pavement Density Profiler: Operating Principles and Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Coring at several locations and conducting air void tests in the laboratory as indicated in [11] is a time consuming, costly, and destructive process;
- Desire for real-time feedback on compaction with devices that would increase productivity of the construction, facilitate shorter construction times, and reduce construction costs;
- Existing methods for density measurements such as nuclear gauges have added complexities relative to licensing, equipment handling, and storage;
- Existing methods all provide only point measurements at spatial limited pavement locations;
- Safety concerns for any operator in trafficked areas.
2. Asphalt Pavement Overview
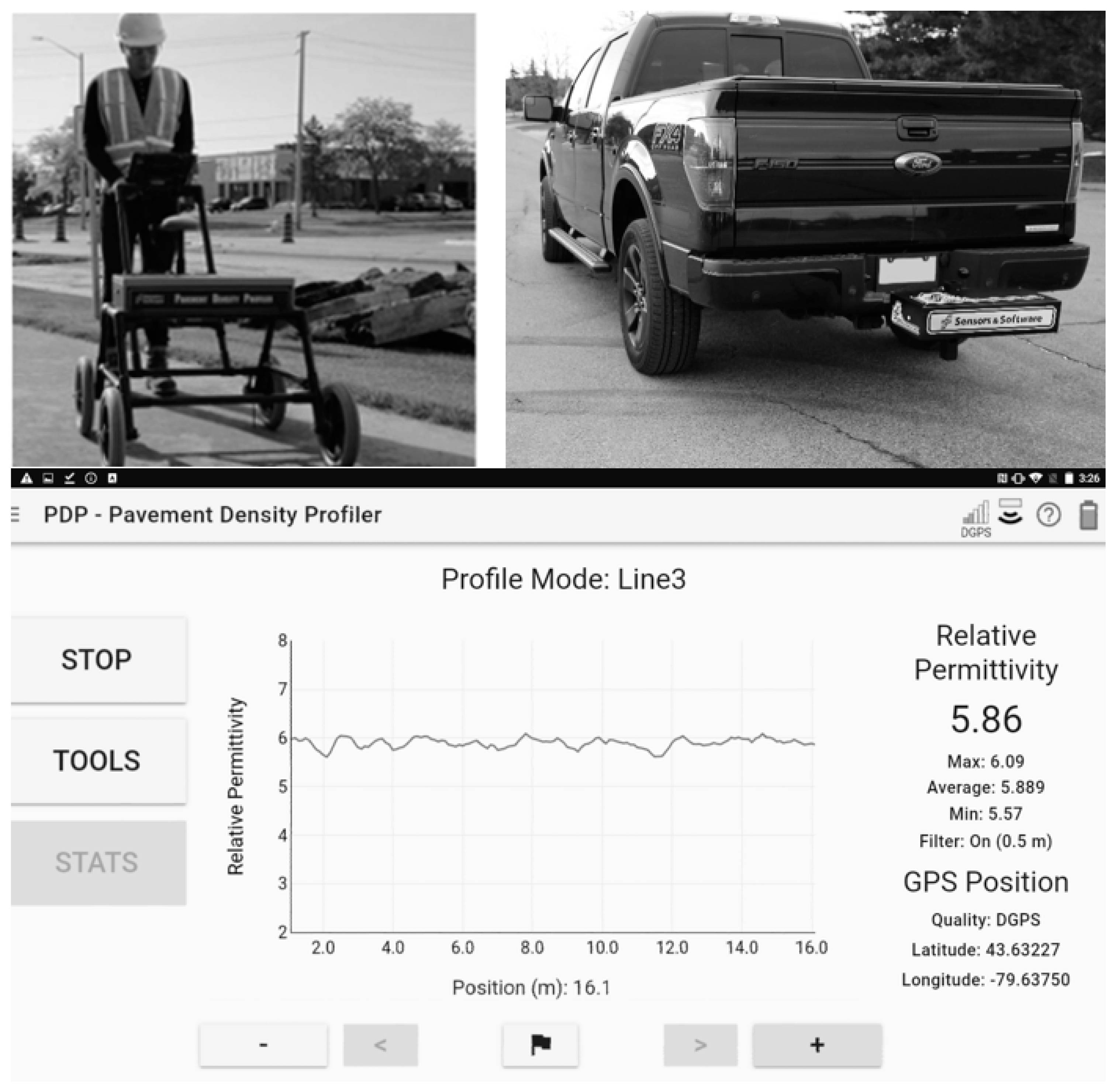
3. PDP Operating Principles and Technical Specifications
4. Density Derivation from PDP Responses
- Relative dielectric permittivity (kr): This is the initial value calculated by PDP. kr is expressed as a unitless quantity relative to the permittivity of free space. All other parameters below are derived from the relative permittivity.
- Density (ρ): This is a display for an absolute density of the asphalt, expressed in units of g/cm3, calculated from the observed relative permittivity. If the user has a core sample with a known density value, a density offset can be applied, such that the measured PDP parameter at the core location equals the known density of the core. This offset is then applied to all the PDP data.
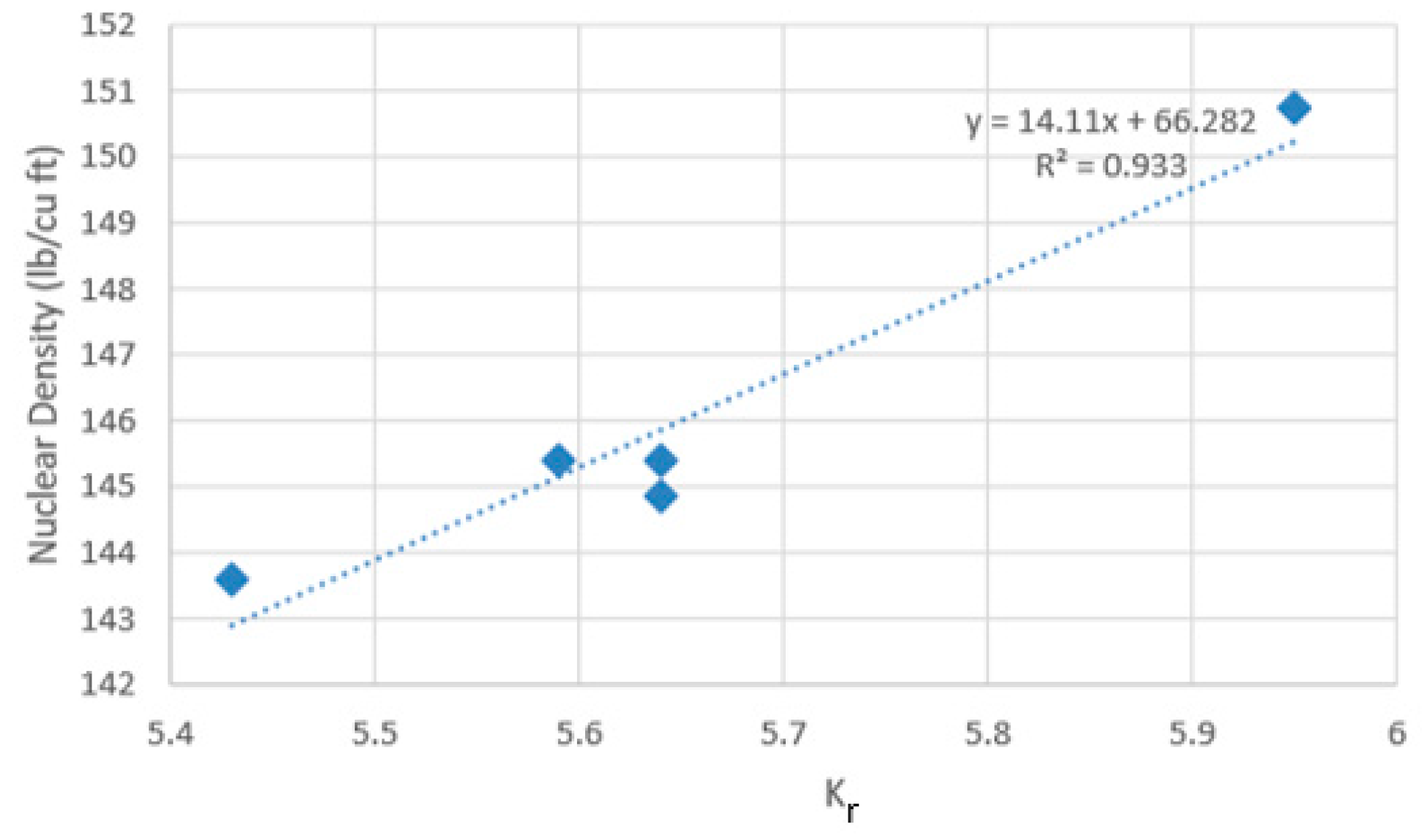
- Density (ρ)—site specific: Measurements of the asphalt properties at the survey site are used to create a unique, site-specific means of translating relative permittivity to density. When the information is available (either from direct density measurements done on cores or from indirect measurements such as using nuclear density gauges), other parameters such as relative density can be displayed in addition to the absolute density of the asphalt, expressed in units of g/cm3. This is a more complex calculation that relies on inputting the coefficients of a parametric relationship as well as the maximum density (). These values can be obtained from a core sample. While more complex, this is a more accurate representation of the true density at the survey site.
- Relative density (): As stated already, this quantity is sometimes called normalized density or percentage compaction. This output expresses the density measured as a percentage of the site-specific maximum density. To calculate , the user must provide . This is usually obtained from a core sample via a testing lab (note that: ).
- Air void content (): It is expressed as a percentage of how much of the volume of the asphalt is air. This also requires inputting (note that: ).
5. Field Examples
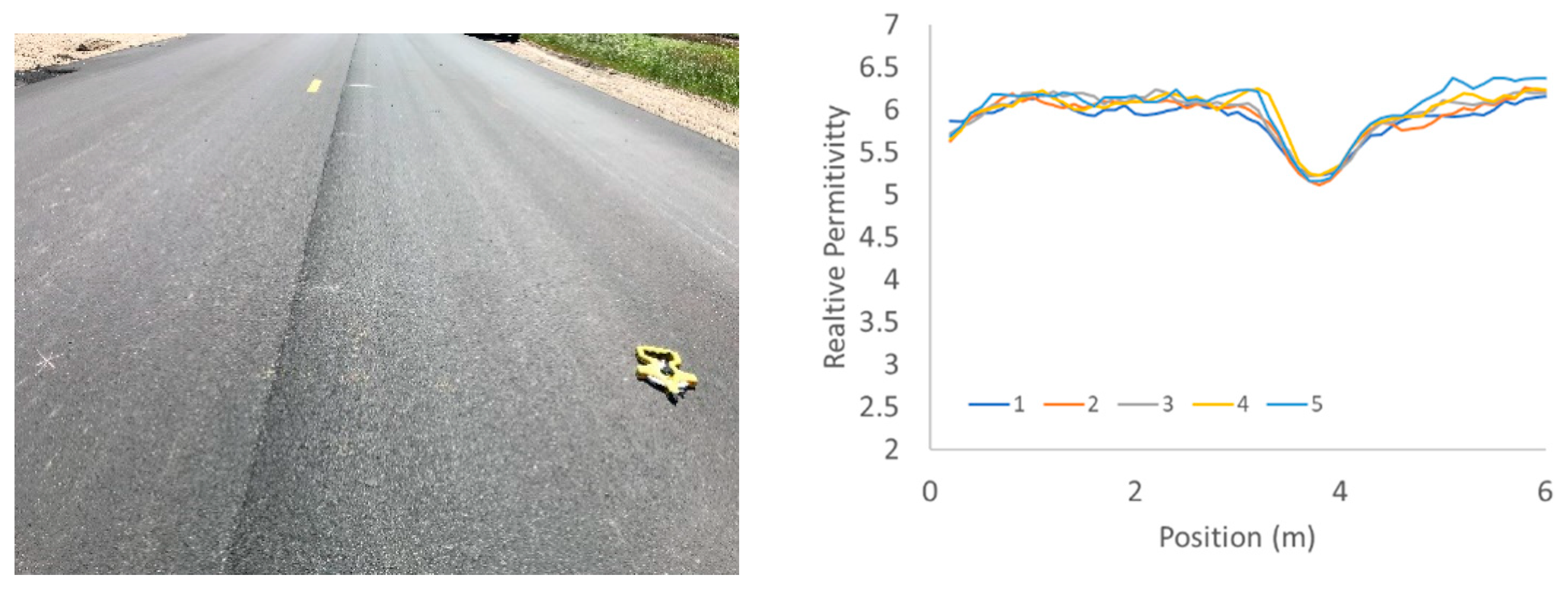
5.1. Repeatability Demonstration
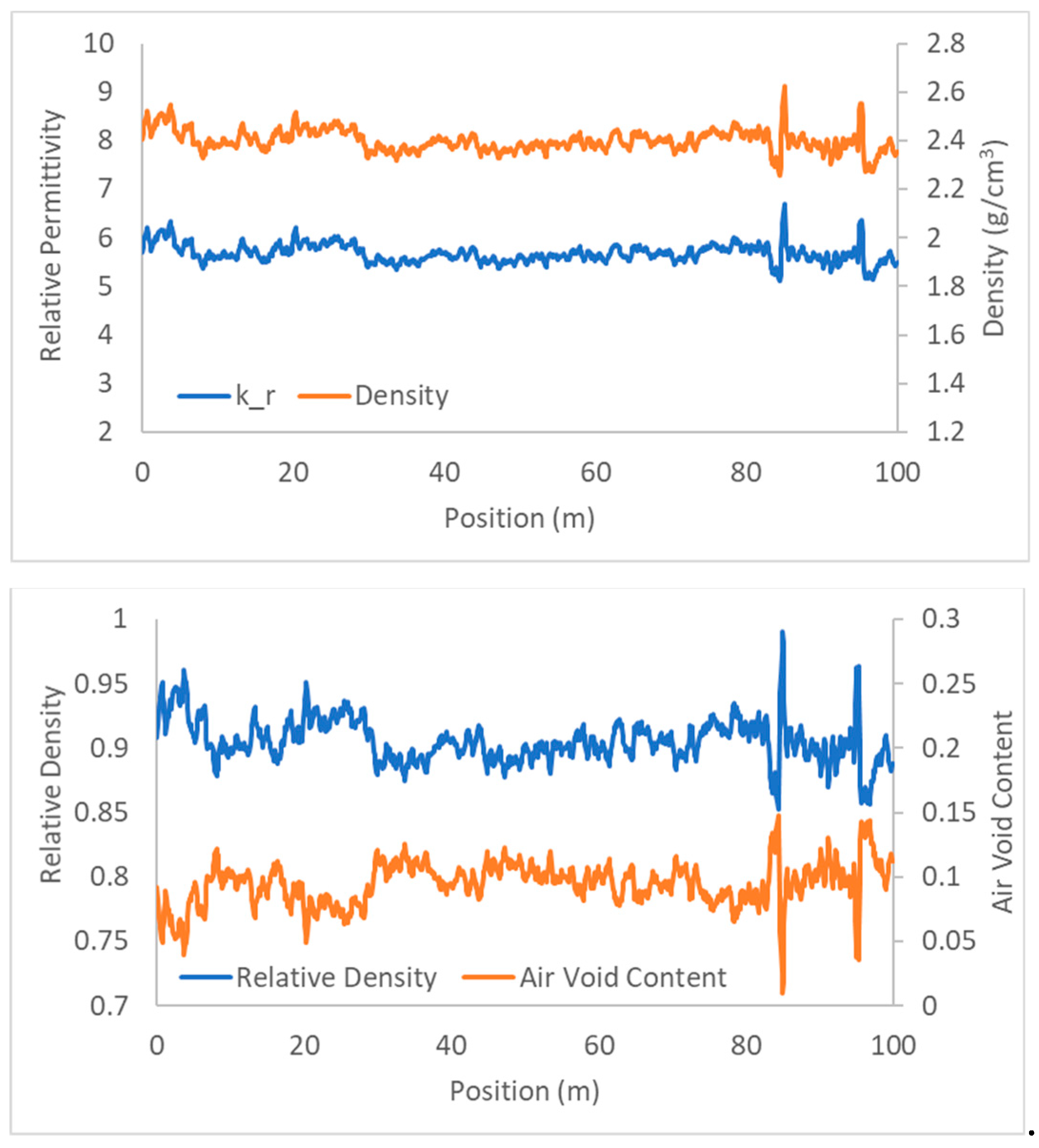
5.2. Full Lane Plan Map
5.3. Various Output Displays
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zube, E. Compaction Studies of Asphalt Concrete Pavement as Related to the Water Permeability Test. In Proceedings of the 41st Annual Meeting of the Highway Research Board, Washington, DC, USA, 8–12 January 1962. [Google Scholar]
- Santucci, L.E.; Allen, D.D.; Coats, R.L. The Effects of Moisture and Compaction on the Quality of Asphalt Pavements. Assoc. Asph. Paving Technol. 1985, 54, 168–208. [Google Scholar]
- Ford, M.C. Pavement Densification Related to Asphalt Mix Characteristics. In Proceedings of the 1988 Annual Meeting of the Transportation Research Board, Washington, DC, USA, January 1988. [Google Scholar]
- Brown, E.R.; Cross, S. A Study of In-Place Rutting of Asphalt Pavements. In Proceedings of the 1989 Annual Meeting of the Association of Asphalt Paving Technologist, Nashville, TN, USA, 22–26 February 1989. [Google Scholar]
- Brown, E.R.; Collins, R.; Brownfield, J.R. Investigation of Segregation of Asphalt Mixtures in State of Georgia. In Proceedings of the 68th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 1989. [Google Scholar]
- Brown, E.R. Density of asphalt concrete: How much is needed? Transp. Res. Rec. J. Transp. Res. Board 1990, 1282, 27–32. [Google Scholar]
- Huber, G.A.; Heiman, G.H. Effect of Asphalt Concrete Parameters on Rutting Performance: A Field Investigation. In Proceedings of the Association of Asphalt Paving Technologists 56, Reno, NV, USA, February 1987; pp. 33–61. [Google Scholar]
- Roberts, F.L.; Kandhal, P.S.; Brown, E.R.; Lee, D.Y.; Kennedy, T.W. Hot Mix Asphalt Materials, Mixture Design, and Construction; National Asphalt Paving Association Education Foundation: Lanham, MD, USA, 1996. [Google Scholar]
- Killingsworth, B.M. Quality Characteristics for Use with Performance Related Specifications for Hot Mix Asphalt; NCHRP Project 9-15 Research Results Digest 291; Transportation Research Board, National Research Council: Washington, DC, USA, 2004. [Google Scholar]
- Commuri, S. Intelligent Asphalt Compaction Analyzer; Final Report FHWA-HIF-12-019; University of Oklahoma: Norman, OK, USA, 2011. [Google Scholar]
- AASHTO T 166. Standard Method of Test for Bulk Specific Gravity (G mb) of Compacted Asphalt Mixtures Using Saturated Surface-Dry Specimens; WSDOT Materials Manual M 46-01.37; American Association of State Highway and Transportation Officials (AASHTO): Washington, DC, USA, 2020. [Google Scholar]
- AASHTO. Asphalt Surface Dielectric Profiling System Using Ground Penetrating Radar; American Association of State Highway and Transportation Officials (AASHTO) Standard Practice; Designation: PP 98-201; AASHTO: Washington, DC, USA, 2020; pp. 98.1–98.9. [Google Scholar]
- Diamanti, N.; Redman, J.D.; Annan, A.P. A GPR-based Sensor to Measure Asphalt Pavement Density. In Proceedings of the 17th International Conference on Ground Penetrating Radar, Rapperswil, Switzerland, 18–21 June 2018. [Google Scholar]
- Diamanti, N.; Annan, A.P.; Jackson, S.R. Measuring Asphalt Pavement Density with a GPR-based Sensor: A Case Study. In Proceedings of the 10th International Workshop on Advanced Ground Penetrating Radar, The Hague, The Netherlands, 8–12 September 2019. [Google Scholar]
- Mallick, R.B.; El-Korchi, T. Pavement Engineering: Principles and Practice; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Chanzy, A.; Tarussov, A.; Bonn, F.; Judge, A. Soil Water Content Determination Using a Digital GPR. Soil Sci. Soc. Am. J. 1996, 60, 1318–1326. [Google Scholar] [CrossRef]
- Redman, J.D.; Davis, J.L.; Galagedara, L.W.; Parkin, G.W. Field Studies of GPR Air Launched Surface Reflectivity Measurements of Soil Water Content. In Proceedings of the 9th International Conference on Ground Penetrating Radar, Santa Barbara, CA, USA, 29 April–2 May 2002; pp. 156–161. [Google Scholar]
- Redman, J.D.; Galagedara, L.; Parkin, G. Measuring soil water content with the ground penetrating radar surface reflectivity method: Effects of spatial variability. In Proceedings of the ASAE Annual International Meeting, Las Vegas, NV, USA, 27–30 July 2003. Paper Number: 032279. [Google Scholar]
- Serbin, G.; Or, D. Near-surface water content measurements using horn antenna radar: Methodology and overview. Vadose Zone J. 2003, 2, 500–510. [Google Scholar] [CrossRef]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Annan, A.P. Ground-Penetrating Radar. In Near-Surface Geophysics; Butler, D.K., Ed.; Society of Exploration Geophysicists (SEG): Tulsa, OK, USA, 2005; No. 13, Chapter 11; pp. 357–438. [Google Scholar]
- FCC. USA Regulations on UWB GPR; Federal Communications Commission (FCC) Regulations, Part 15.503; FCC: Washington, DC, USA, 2003. [Google Scholar]
- RSS-220 Industry Canada. Devices Using UWB Technology; Radio Standards Specification RSS-220; Industry Canada, 2009; Issue 1; p. 19.
- Diamanti, N.; Redman, J.D.; Hogan, C.M.; Annan, A.P. Air-launched GPR depth of investigation. In Proceedings of the 18th International Conference on Ground Penetrating Radar, SEG, Golden, CO, USA, 14–19 June 2020. [Google Scholar]
- Shangguan, P.; Al-Qadi, I.; Lahouar, S. Pattern recognition algorithms for density estimation of asphalt pavement during compaction: A simulation study. J. Appl. Geophys. 2014, 107, 8–15. [Google Scholar] [CrossRef]
- Shangguan, P.; Al-Qadi, I.L. Calibration of FDTD Simulation of GPR Signal for Asphalt Pavement Compaction Monitoring. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1538–1548. [Google Scholar] [CrossRef]
- Leng, Z.; Al-Qadi, I.; Lahouar, S. Development and validation for insitu asphalt mixture density prediction models. NDT & E Int. 2011, 44, 369–375. [Google Scholar]
- Wang, S.; Al-Qadi, I.L.; Cao, Q. Factors impacting monitoring asphalt pavement density by ground penetrating radar. NDT & E Int. 2020, 115, 102296. [Google Scholar]
- Saarenketo, T.; Roimela, P. Ground Penetrating Radar Technique in Asphalt Pavement Density Quality Control. In Proceedings of the 7th International Conference on Ground Penetrating Radar, Lawrence, KS, USA, 27–30 May 1998; pp. 461–466. [Google Scholar]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Maser, K. Infrasense—Development of a Pavement Thickness Density Meter; NCHRP-61 Final Report; Infrasense Inc.: Arlington, MA, USA, 2002. [Google Scholar]
- Sebesta, S.; Wang, F.; Scullion, T.; Liu, W. New Infrared and Radar Systems for Detecting Segregation in Hot-Mix Asphalt Construction; Report: FHWA/TX-05/0-4577-2; Texas Transportation Institute, The Texas A&M University System: Austin, TX, USA, 2002. [Google Scholar]
- Saarenketo, T. Electrical Properties of Road Materials and Subgrade Soils and the Use of Ground Penetrating Radar in Traffic Infrastructure Surveys. Ph.D. Thesis, University of Oulu, Oulu, Finland, 2006. [Google Scholar]
- Popik, M.; Lee, H.; Aho, B.; Maser, K.; Holzschuher, C. Using ground penetrating radar for evaluation of asphalt density measurements. In Proceedings of the 89th Annual Meeting of the Transportation Research Board, Washington, DC, USA; 2010. [Google Scholar]
- Al-Qadi, I.; Leng, Z.; Larkin, A. In-place hot mix asphalt density estimation using ground penetrating radar. In Nondestructive Testing and Evaluation (NDTE) Technologies for Airport Pavement Acceptance and Quality Assurance Activities; ICT Report No. 11-096; University of Illinois: Champaign, IL, USA, 2011. [Google Scholar]
- Plati, C.; Loizos, A. Estimation of in-situ density and moisture content in HMA pavements based on GPR trace reflection amplitude using different frequencies. J. Appl. Geophys. 2013, 97, 3–10. [Google Scholar] [CrossRef]
- Lichtenecker, K. Die Dielektrizitätskonstante natürlicher und künstlicher Mischkörper. Phys. Zeitschr. 1926, XXVII, 115–158. [Google Scholar]
- Olhoeft, G.R. Electrical properties of rocks. In Physical Properties of Rocks and Minerals; Touloukian, Y.S., Judd, W.R., Roy, R.F., Eds.; McGraw-Hill: New York, NY, USA, 1981; pp. 257–330. [Google Scholar]
- Birchak, J.R.; Gardner, C.G.; Hipp, J.E.; Victor, J.M. High dielectric constant microwave probes for sensing soil moisture. Proc. IEEE 1974, 62, 93–98. [Google Scholar] [CrossRef]
- Sensors & Software Inc. PDP Toolkit User’s Guide. v. 2020-00058-00; Sensors & Software Inc.: Mississauga, ON, Canada, 2020. [Google Scholar]
- Kalogeropoulos, A.; van der Kruk, J.; Hugenschmidt, J.; Bikowski, J.; Bruhwiler, E. Full-waveform GPR inversion to assess chloride gradients in concrete. NDT & E Int. 2013, 57, 74–84. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diamanti, N.; Annan, A.P.; Jackson, S.R.; Klazinga, D. A GPR-Based Pavement Density Profiler: Operating Principles and Applications. Remote Sens. 2021, 13, 2613. https://doi.org/10.3390/rs13132613
Diamanti N, Annan AP, Jackson SR, Klazinga D. A GPR-Based Pavement Density Profiler: Operating Principles and Applications. Remote Sensing. 2021; 13(13):2613. https://doi.org/10.3390/rs13132613
Chicago/Turabian StyleDiamanti, Nectaria, A. Peter Annan, Steven R. Jackson, and Dylan Klazinga. 2021. "A GPR-Based Pavement Density Profiler: Operating Principles and Applications" Remote Sensing 13, no. 13: 2613. https://doi.org/10.3390/rs13132613
APA StyleDiamanti, N., Annan, A. P., Jackson, S. R., & Klazinga, D. (2021). A GPR-Based Pavement Density Profiler: Operating Principles and Applications. Remote Sensing, 13(13), 2613. https://doi.org/10.3390/rs13132613