
Petri-Net Based Multi-Objective Optimization in Multi-UAV Aided Large-Scale Wireless Power and Information Transfer Networks


Abstract
:
1. Introduction
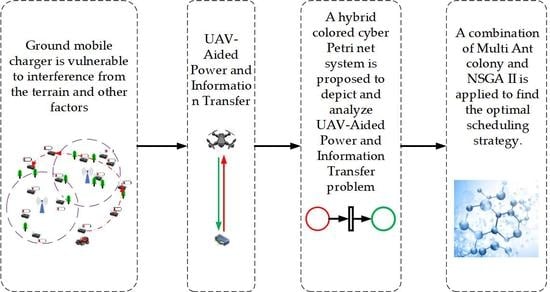
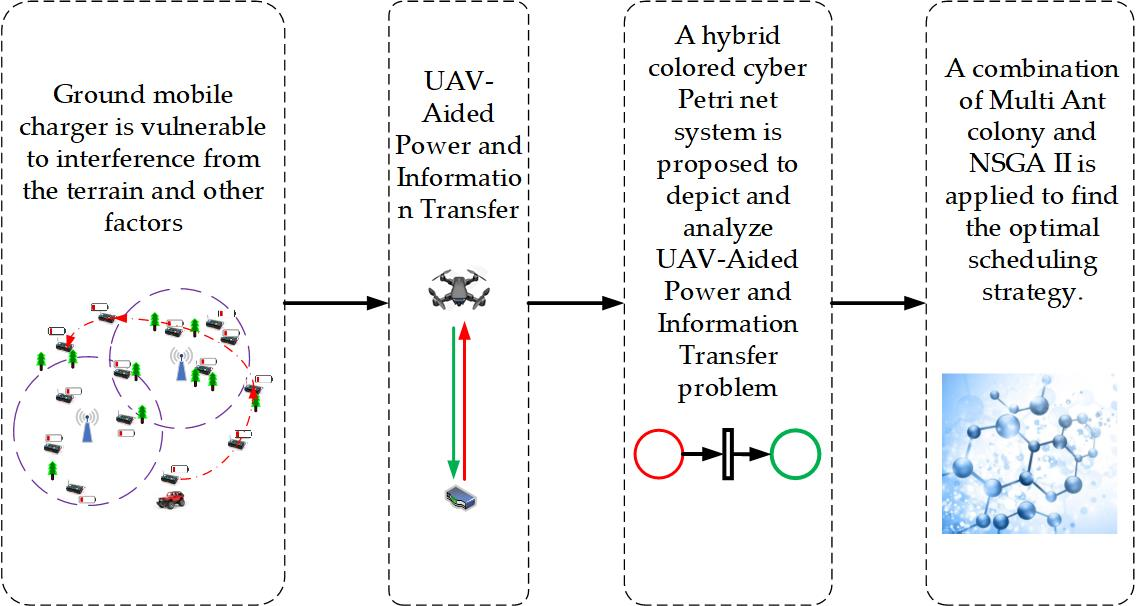
- The HCCPNS (hybrid colored cyber Petri net system) is proposed for the first time to model the multi-UAV aided wireless power and information transfer system. The place represents the status of the UAV or SD, where the continuous part is the energy, and the discrete part is information. The variation of a marking or a token corresponds to the continuous transition and the discrete transition, respectively. To the best of our knowledge, this is the first time that Petri net is employed to express the energy flow, control flow, and information flow simultaneously.
- The multi-UAV aided wireless power and information transfer is constructed as a multi-objective optimization problem. On the one hand, we hoped that the UAV can replenish more energy for SDs, thus improving energy efficiency. Since the wireless charging power is constant, this inevitably results in a longer hovering time. On the other hand, when an SD sends out the request for information transmission, it expects a UAV to arrive at the corresponding position to receive data as soon as possible, that is, the time delay of information collection should be minimal. It is not difficult to see that the two targets are in conflict and a trade-off needs to be found.
- Under the premise of one-to-one service, the strategy of trajectory assignment and hover of multiple UAVs is designed. The MAC-NSGA II is proposed in order to optimize the energy utilization and average delay of information simultaneously based on the optimal trajectory of multiple UAVs. Numerical simulation results demonstrate that the proposed algorithm has excellent performance, especially for large scale networks.
2. Related Work
3. System Model and Problem Formulation
3.1. UAV-Aided Wireless Power and Information Transfer Model
3.2. The Specification of Petri Net
- (1)
- is a directed net, which is named the basic net of;
- (2)
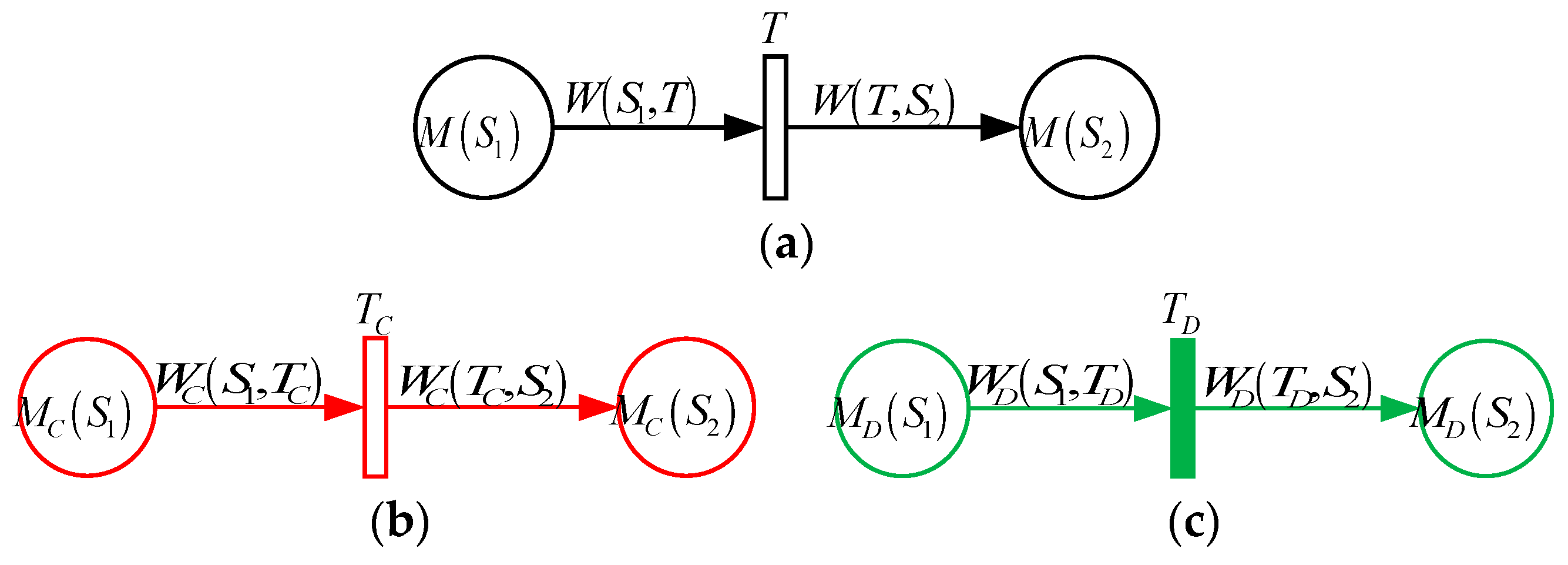
- C is the vector of colors with red and green,;
- (3)
- The place, transition, and weight function of directed arc all contain two colors; the red one represents the continuous part and the green one represents the discrete part, i.e.,,,;
- (4)
- ,,and;,,,andis the flow, read, write, inhibitor, and permission relationship;
- (5)
- is the lower and upper capacity function of, and,whereis a set of real numbers;
- (6)
- is the weight function, whereis the set of functional expressions for;
- (7)
- is the marking, andis the initial marking.
4. Multiple Ant Colony-Nondominated Sorting Genetic Algorithm II
4.1. Ant State Transition Strategy
| Algorithm 1 Pseudo-code of the multiple ant colony-nondominated sorting genetic algorithm II |
| Input: Number of UAVs and SDs, Location of the depot and SDs, Residual energy and power consumption of SDs |
| Output: Optimal trajectory of UAVs, the set of hovering |
| 1: Initialize all parameters and pheromone trails; 2: ; |
| 3: while do |
| 4: for each UAV 5: for each SD 6: generate initial solution with pheromone concentration and distances between SDs; 7: end for 8: construct solution following (20); 9: update the pheromone following (21) and according to the residual pheromone and the length of path; |
| 10: end for |
| 11: end while |
| 12: Obtain the optimal flying trajectory; 13: Taking the hovering time above every SD as independent variable, initialize the population ; 14: Combine parent and offspring population ; 15: all nondominated of : ; 16: and ; 17: while do 18: calculate crowding-distance in ; 19: ; 20: ; 21: ; 22: Choose the first element of ,; 23: Use selection, crossover and mutation to create a new population ; 24: ; 25: end while 26: The pareto set of hovering time. |
- The greater the pheromone concentration from one location to the next, the more likely the ant is to choose that path.
- The shorter the distance between the current position and the next position the ant traverses, the greater the probability that the ant chooses the path.
4.2. Pheromone Update Strategies
- (1)
- Pheromones that are positively correlated with the superiority of feasible solutions are uniformly added to all subpath.
- (2)
- If the length of the subpath is less than the mean of all the subpaths, is reduced to . On the contrary, is reduced to .
- (3)
- The pheromone of the shortest subpath and the longest subpath is reduced to, so that they can be recombined to form a better feasible solution.
5. Simulation and Numeric Results
5.1. Simulation Setup and Environment Parameters
- (1)
- UAV’s trajectory. This indicator reflects the influence of the number of UAVs on the trajectory length.
- (2)
- UAV’s energy efficiency. It represents the proportion of the energy received by SDs in the total energy consumption of UAVs, which is affected by different network sizes and the number of UAVs.
- (3)
- Average time delay of information collection. This index reflects the timeliness of gathering information perceived by SDs.
5.2. Performance
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aceto, G.; Persico, V.; Pescape, A. Industry 4.0 and Health: Internet of Things, Big Data, and Cloud Computing for Healthcare 4.0. J. Ind. Inf. Integr. 2020, 18. [Google Scholar] [CrossRef]
- Lu, Y.; Xu, L.D. Internet of Things (IoT) Cybersecurity Research: A Review of Current Research Topics. IEEE Internet Things J. 2019, 6, 2103–2115. [Google Scholar] [CrossRef]
- Al Homssi, B.; Al-Hourani, A.; Chandrasekharan, S.; Gomez, K.M.; Kandeepan, S. On the Bound of Energy Consumption in Cellular IoT Networks. IEEE Trans. Green Commun. Network. 2020, 4, 355–364. [Google Scholar] [CrossRef]
- Hsu, C.F.; Harn, L.; Xia, Z.; Zhang, M.Y.; Zhao, Z. Non-interactive integrated membership authentication and group arithmetic computation output for 5G sensor networks. IET Commun. 2021, 15, 328–336. [Google Scholar] [CrossRef]
- Ali, K.; Nguyen, H.X.; Vien, Q.T.; Shah, P.; Raza, M.; Paranthaman, V.V.; Er-Rahmadi, B.; Awais, M.; Islam, S.u.; Rodrigues, J. Review and Implementation of Resilient Public Safety Networks: 5G, IoT, and Emerging Technologies. IEEE Netw. 2021, 35, 18–25. [Google Scholar] [CrossRef]
- Al Homssi, B.; Al-Hourani, A.; Chavez, K.G.; Chandrasekharan, S.; Kandeepan, S. Energy-Efficient IoT for 5G: A Framework for Adaptive Power and Rate Control. In Proceedings of the 2018 12th International Conference on Signal Processing and Communication Systems (ICSPCS), Cairns, Australia, 17–19 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Khan, R.; Kumar, P.; Jayakody, D.N.K.; Liyanage, M. A Survey on Security and Privacy of 5G Technologies: Potential Solutions, Recent Advancements, and Future Directions. IEEE Commun. Surv. Tutor. 2020, 22, 196–248. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless Networks with RF Energy Harvesting: A Contemporary Survey. IEEE Commun. Surv. Tutor. 2015, 17, 757–789. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Wang, P.; Niyato, D.; Kim, D.I.; Han, Z. Wireless Charging Technologies: Fundamentals, Standards, and Network Applications. IEEE Commun. Surv. Tutor. 2016, 18, 1413–1452. [Google Scholar] [CrossRef] [Green Version]
- Karimi, M.J.; Schmid, A.; Dehollain, C. Wireless Power and Data Transmission for Implanted Devices via Inductive Links: A Systematic Review. IEEE Sens. J. 2021, 21, 7145–7161. [Google Scholar] [CrossRef]
- Mo, L.; Kritikakou, A.; He, S.B. Energy-Aware Multiple Mobile Chargers Coordination for Wireless Rechargeable Sensor Networks. IEEE Internet Things J. 2019, 6, 8202–8214. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Yang, P.L.; Dai, H.P.; Xiang, C.C.; Rao, X.P.; Huang, J.; Ma, T. Joint Sensor Selection and Energy Allocation for Tasks-Driven Mobile Charging in Wireless Rechargeable Sensor Networks. IEEE Internet Things J. 2020, 7, 11505–11523. [Google Scholar] [CrossRef]
- Sha, C.; Sun, Y.; Malekian, R. Research on Cost-Balanced Mobile Energy Replenishment Strategy for Wireless Rechargeable Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 3135–3150. [Google Scholar] [CrossRef]
- Lan, X.L.; Zhang, Y.M.; Cai, L.; Chen, Q.C. Adaptive Transmission Design for Rechargeable Wireless Sensor Network with a Mobile Sink. IEEE Internet Things J. 2020, 7, 9011–9025. [Google Scholar] [CrossRef]
- Lyu, Z.W.; Wei, Z.C.; Wang, X.; Fan, Y.Q.; Xia, C.K.; Shi, L. A Periodic Multinode Charging and Data Collection Scheme With Optimal Traveling Path in WRSNs. IEEE Syst. J. 2020, 14, 3518–3529. [Google Scholar] [CrossRef]
- Zhao, C.X.; Zhang, X.; Wu, C.Z.; Chen, S.G.; Chen, F.L. Design of optimal utility of wireless rechargeable sensor networks via joint spatiotemporal scheduling. Appl. Math. Model. 2020, 86, 54–73. [Google Scholar] [CrossRef]
- Yang, M.Y.; Liu, N.B.; Zuo, L.; Feng, Y.; Liu, M.H.; Gong, H.G.; Liu, M. Dynamic Charging Scheme Problem with Actor-Critic Reinforcement Learning. IEEE Internet Things J. 2021, 8, 370–380. [Google Scholar] [CrossRef]
- Erdelj, M.; Krol, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86. [Google Scholar] [CrossRef]
- Liu, M.; Yang, J.; Gui, G. DSF-NOMA: UAV-Assisted Emergency Communication Technology in a Heterogeneous Internet of Things. IEEE Internet Things J. 2019, 6, 5508–5519. [Google Scholar] [CrossRef]
- Cheng, F.; Gui, G.; Zhao, N.; Chen, Y.F.; Tang, J.; Sari, H. UAV-Relaying-Assisted Secure Transmission with Caching. IEEE Trans. Commun. 2019, 67, 3140–3153. [Google Scholar] [CrossRef] [Green Version]
- Cavone, G.; Dotoli, M.; Seatzu, C. A Survey on Petri Net Models for Freight Logistics and Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1795–1813. [Google Scholar] [CrossRef]
- Ahmed, F.D.; Majid, M.A. Towards agent-based petri net decision making modelling for cloud service composition: A literature survey. J. Netw. Comput. Appl. 2019, 130, 14–38. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef] [Green Version]
- Du, Y.; Yang, K.; Wang, K.Z.; Zhang, G.P.; Zhao, Y.Z.; Chen, D.W. Joint Resources and Workflow Scheduling in UAV-Enabled Wirelessly-Powered MEC for IoT Systems. IEEE Trans. Veh. Technol. 2019, 68, 10187–10200. [Google Scholar] [CrossRef]
- Hu, Y.L.; Yuan, X.P.; Xu, J.; Schmeink, A. Optimal 1D Trajectory Design for UAV-Enabled Multiuser Wireless Power Transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef] [Green Version]
- Xie, L.F.; Xu, J.; Zhang, R. Throughput Maximization for UAV-Enabled Wireless Powered Communication Networks. IEEE Internet Things J. 2019, 6, 1690–1703. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Han, S.I.; Han, Y. Optimal UAV Route in Wireless Charging Sensor Networks. IEEE Internet Things J. 2020, 7, 1327–1335. [Google Scholar] [CrossRef]
- Su, C.X.; Ye, F.; Wang, L.C.; Wang, L.; Tian, Y.; Han, Z. UAV-Assisted Wireless Charging for Energy-Constrained IoT Devices Using Dynamic Matching. IEEE Internet Things J. 2020, 7, 4789–4800. [Google Scholar] [CrossRef]
- Wu, P.F.; Xiao, F.; Sha, C.; Huang, H.P.; Sun, L.J. Trajectory Optimization for UAVs’ Efficient Charging in Wireless Rechargeable Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 4207–4220. [Google Scholar] [CrossRef]
- Wu, P.F.; Xiao, F.; Huang, H.P.; Wang, R.C. Load Balance and Trajectory Design in Multi-UAV Aided Large-Scale Wireless Rechargeable Networks. IEEE Trans. Veh. Technol. 2020, 69, 13756–13767. [Google Scholar] [CrossRef]
- Yan, H.; Chen, Y.F.; Yang, S.H. UAV-Enabled Wireless Power Transfer with Base Station Charging and UAV Power Consumption. IEEE Trans. Veh. Technol. 2020, 69, 12883–12896. [Google Scholar] [CrossRef]
- Hu, H.; Huang, Y.C.; Da, X.Y.; Zhang, H.; Gao, W.T.; Ni, L.; Pan, Y. Optimization of Energy Utilization in Cognitive UAV Systems. IEEE Sens. J. 2021, 21, 3933–3943. [Google Scholar] [CrossRef]
- Hu, H.M.; Xiong, K.; Qu, G.; Ni, Q.; Fan, P.Y.; Letaief, K.B. AoI-Minimal Trajectory Planning and Data Collection in UAV-Assisted Wireless Powered IoT Networks. IEEE Internet Things J. 2021, 8, 1211–1223. [Google Scholar] [CrossRef]
- De Suman, S. Optimal UAV-Aided RFET System Design in Presence of Hovering Inaccuracy. IEEE Trans. Commun. 2021, 69, 558–572. [Google Scholar] [CrossRef]
- Yuan, X.P.; Yang, T.Y.; Hu, Y.L.; Xu, J.; Schmeink, A. Trajectory Design for UAV-Enabled Multiuser Wireless Power Transfer with Nonlinear Energy Harvesting. IEEE Trans. Wirel. Commun. 2021, 20, 1105–1121. [Google Scholar] [CrossRef]
- Caillouet, C.; Razafindralambo, T.; Zorbas, D. Optimal placement of drones for fast sensor energy replenishment using wireless power transfer. In 2019 Wireless Days; IEEE: New York, NY, USA, 2019. [Google Scholar] [CrossRef] [Green Version]
- Baek, J.; Han, S.I.; Han, Y. Energy-Efficient UAV Routing for Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 1741–1750. [Google Scholar] [CrossRef]
- Subash, J.S.; Vijay, M.; Preveen, V.; Mohith, V.; Panda, M. Sensor Data Harvesting Using an Autonomous Drone. In Proceedings of the 2020 5th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 10–12 June 2020. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P. Inter-UAV Routing Scheme Testbeds. Drones 2021, 5, 2. [Google Scholar] [CrossRef]
- Casalino, A.; Zanchettin, A.M.; Piroddi, L.; Rocco, P. Optimal Scheduling of Human-Robot Collaborative Assembly Operations with Time Petri Nets. IEEE Trans. Autom. Sci. Eng. 2021, 18, 70–84. [Google Scholar] [CrossRef]
- Cao, R.M.; Hao, L.N.; Gao, Q.; Deng, J.X.; Chen, J.M. Modeling and Decision-Making Methods for a Class of Cyber-Physical Systems Based on Modified Hybrid Stochastic Timed Petri Net. IEEE Syst. J. 2020, 14, 4684–4693. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, H.S. A Distributed Control Approach to Automated Manufacturing Systems with Complex Routes and Operations Using Petri Nets. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3670–3684. [Google Scholar] [CrossRef]
- Luo, J.L.; Wan, Y.X.; Wu, W.M.; Li, Z.W. Optimal Petri-Net Controller for Avoiding Collisions in a Class of Automated Guided Vehicle Systems. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4526–4537. [Google Scholar] [CrossRef]
- Luo, J.L.; Huang, Y.S.; Weng, Y.S. Design of Variable Traffic Light Control Systems for Preventing Two-Way Grid Network Traffic Jams Using Timed Petri Nets. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3117–3127. [Google Scholar] [CrossRef]
- Qin, H.; Xu, L.; Zhao, B.; Wan, J. Petri-Net based Modelling and Multi-Objective Optimal Deployment for WRSN. Control Eng. Appl. Inform. 2020, 22, 3–12. [Google Scholar]
- Qin, H.Y.; Zhao, B.H.; Xu, L.J.; Bai, X. Hybrid Cyber Petri net Modelling, Simulation and Analysis of Master-Slave Charging for Wireless Rechargeable Sensor Networks. Sensors 2021, 21, 551. [Google Scholar] [CrossRef] [PubMed]
- Lu, L.C.; Yue, T.W. Mission-oriented ant-team ACO for min-max MTSP. Appl. Soft Comput. 2019, 76, 436–444. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| number of UAVs | |
| number of SDs | |
| moving power of the UAV | |
| hovering power of the UAV | |
| transmitting power of the UAV | |
| received energy of the th SD from the th UAV | |
| moving energy of the th UAV | |
| hovring energy of the th UAV | |
| transmitting energy of the th UAV |
| Name | Function |
|---|---|
| Place when the -th UAV hovers directly over the -th SD | |
| Place of the -th SD | |
| Transition that the -th UAV flies from the -th to ()th SD | |
| Transition that the -th UAV hovers directly over the -th SD | |
| Transition that the -th UAV collects information from the -th SD | |
| Transition that the -th SD consumes energy | |
| Transition that the -th UAV returns to the depot emergently |
| Arc | Weight |
|---|---|
| - | |
| 1 | |
| 1 | |
| ,, | |
| ,, | |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ) | 0.503 | 4.03 | |
| 120 | 0.6 | ||
| 0.05 | 1.225 | ||
| 20 | 13.7 | ||
| 10 | 30 | ||
| 90% | 3 | ||
| −60 |
| Number of SDs | Number of UAVs | MAC-NSGA II | NSGAIII | MOEA/D | |||||
|---|---|---|---|---|---|---|---|---|---|
| Optimal | Worst | Average | Median | Optimal | Median | Optimal | Median | ||
| 200 | 6 | 2.13% | 1.08% | 1.64% | 1.69% | 2.02% | 1.59% | 1.93% | 1.54% |
| 9 | 2.15% | 1.13% | 1.69% | 1.72% | 2.06% | 1.62% | 1.97% | 1.57% | |
| 12 | 2.16% | 1.17% | 1.75% | 1.82% | 2.09% | 1.72% | 1.97% | 1.69% | |
| 15 | 2.21% | 1.32% | 1.84% | 1.88% | 2.12% | 1.79% | 2.00% | 1.70% | |
| 400 | 6 | 1.90% | 0.66% | 1.32% | 1.33% | 1.80% | 1.27% | 1.73% | 1.25% |
| 9 | 1.92% | 0.69% | 1.33% | 1.35% | 1.83% | 1.30% | 1.75% | 1.27% | |
| 12 | 2.00% | 0.80% | 1.42% | 1.39% | 1.92% | 1.34% | 1.82% | 1.30% | |
| 15 | 2.09% | 0.98% | 1.58% | 1.61% | 1.97% | 1.51% | 1.84% | 1.47% | |
| 600 | 6 | 1.58% | 0.39% | 0.93% | 0.90% | 1.49% | 0.84% | 1.43% | 0.79% |
| 9 | 1.72% | 0.51% | 1.09% | 1.03% | 1.61% | 0.97% | 1.55% | 0.92% | |
| 12 | 1.74% | 0.51% | 1.17% | 1.19% | 1.67% | 1.12% | 1.57% | 1.07% | |
| 15 | 1.88% | 0.64% | 1.28% | 1.30% | 1.77% | 1.22% | 1.71% | 1.14% | |
| 800 | 6 | 1.48% | 0.33% | 0.83% | 0.84% | 1.39% | 0.80% | 1.35% | 0.73% |
| 9 | 1.51% | 0.35% | 0.86% | 0.87% | 1.44% | 0.77% | 1.37% | 0.75% | |
| 12 | 1.70% | 0.47% | 1.03% | 1.00% | 1.62% | 0.94% | 1.57% | 0.89% | |
| 15 | 1.77% | 0.53% | 1.12% | 1.13% | 1.67% | 1.07% | 1.63% | 1.04% | |
| 1000 | 6 | 1.20% | 0.22% | 0.62% | 0.58% | 1.13% | 0.54% | 1.09% | 0.51% |
| 9 | 1.49% | 0.34% | 0.86% | 0.83% | 1.42% | 0.79% | 1.35% | 0.74% | |
| 12 | 1.54% | 0.36% | 0.90% | 0.87% | 1.47% | 0.82% | 1.39% | 0.78% | |
| 15 | 1.60% | 0.40% | 0.95% | 0.95% | 1.51% | 0.89% | 1.46% | 0.84% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, H.; Zhao, B.; Xu, L.; Bai, X. Petri-Net Based Multi-Objective Optimization in Multi-UAV Aided Large-Scale Wireless Power and Information Transfer Networks. Remote Sens. 2021, 13, 2611. https://doi.org/10.3390/rs13132611
Qin H, Zhao B, Xu L, Bai X. Petri-Net Based Multi-Objective Optimization in Multi-UAV Aided Large-Scale Wireless Power and Information Transfer Networks. Remote Sensing. 2021; 13(13):2611. https://doi.org/10.3390/rs13132611
Chicago/Turabian StyleQin, Huaiyu, Buhui Zhao, Leijun Xu, and Xue Bai. 2021. "Petri-Net Based Multi-Objective Optimization in Multi-UAV Aided Large-Scale Wireless Power and Information Transfer Networks" Remote Sensing 13, no. 13: 2611. https://doi.org/10.3390/rs13132611
APA StyleQin, H., Zhao, B., Xu, L., & Bai, X. (2021). Petri-Net Based Multi-Objective Optimization in Multi-UAV Aided Large-Scale Wireless Power and Information Transfer Networks. Remote Sensing, 13(13), 2611. https://doi.org/10.3390/rs13132611