
Assessment of the Reprocessed Suomi NPP VIIRS Enterprise Cloud Mask Product




Abstract
1. Introduction
2. Method and Data
3. Results and Discussion
3.1. Cloud Mask Type Comparison
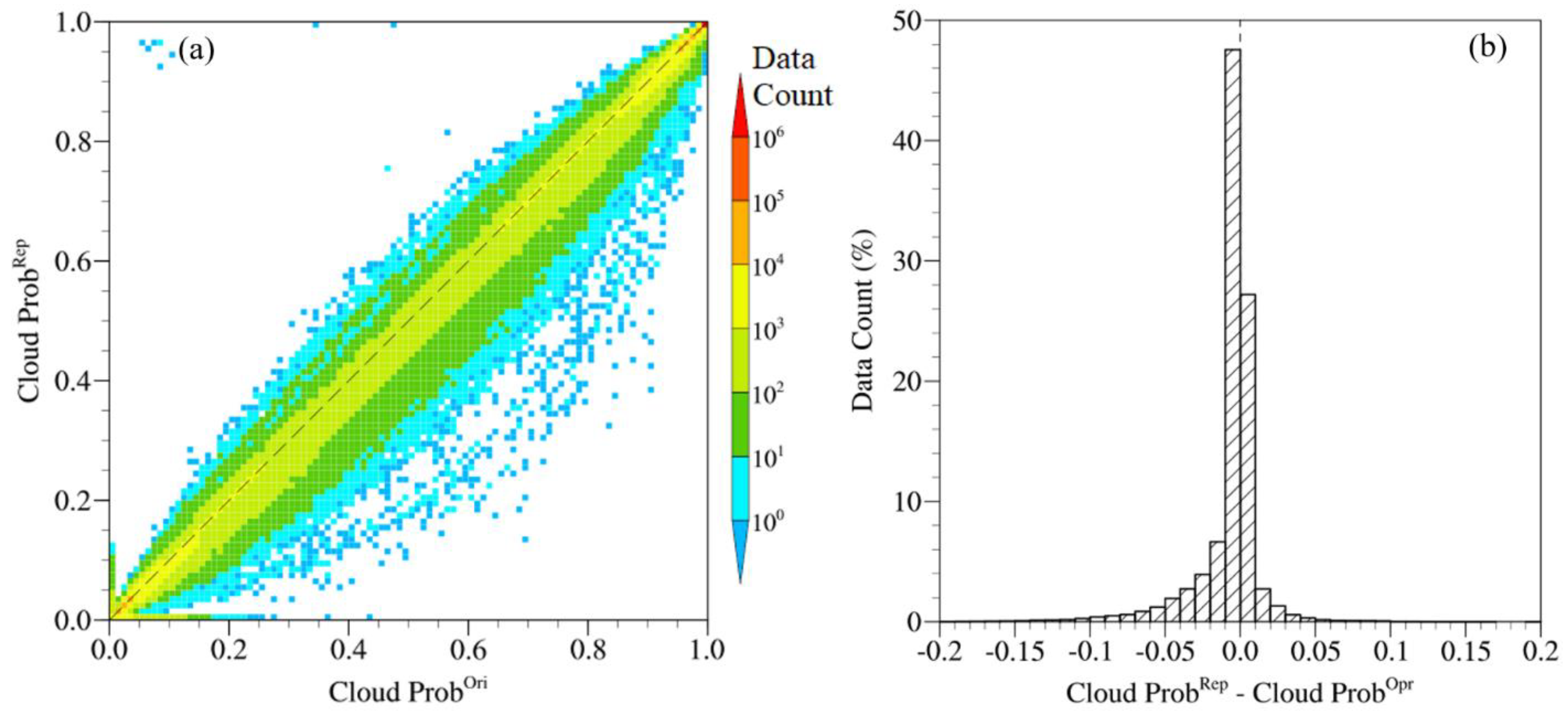
3.2. Cloud Probability Comparison
4. Discussion and Conclusions
Disclaimer
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cao, C.; Xiong, X.J.; Wolfe, R.; DeLuccia, F.; Liu, Q.M.; Blonski, S.; Lin, G.G.; Nishihama, M.; Pogorzala, D.; Oudrari, H.; et al. Visible Infrared Imaging Radiometer Suite (VIIRS) Sensor Data Record (SDR) User’s Guide, Version 1.2, NOAA Technical Report NESDIS 142A; NESDIS/NOAA/Department of Commerce: Washington, DC, USA, 2013; p. 46.
- Cao, C.; De Luccia, F.J.; Xiong, X.; Wolfe, R.; Weng, F. Early on-orbit performance of the visible infrared imaging radiometer suite onboard the suomi national polar-orbiting partnership (S-NPP) satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef]
- Zhou, L.; Divakarla, M.; Liu, X. An Overview of the Joint Polar Satellite System (JPSS) Science Data Product Calibration and Validation. Remote Sens. 2016, 8, 139. [Google Scholar] [CrossRef]
- Cao, C.; Xiong, J.; Blonski, S.; Liu, Q.; Uprety, S.; Shao, X.; Bai, Y.; Weng, F. Suomi NPP VIIRS sensor data record verification, validation, and long-term performance monitoring. J. Geophys. Res.-Atmos. 2013, 118, 11664–11678. [Google Scholar] [CrossRef]
- Blonski, S.; Cao, C. Suomi NPP VIIRS Reflective Solar Bands operational calibration reprocessing. Remote Sens. 2015, 7, 16131–16149. [Google Scholar] [CrossRef]
- Cao, C.; Wang, W.; Blonski, S.; Zhang, B. Radiometric traceability diagnosis and bias correction for the Suomi NPP VIIRS long-wave infrared channels during blackbody unsteady states. J. Geophys. Res.-Atmos. 2017, 122, 5285–5297. [Google Scholar] [CrossRef]
- Wang, W.; Cao, C.; Zhang, B.; Wang, L. Operational Correction and Validation of the VIIRS TEB Longwave Infrared Band Calibration Bias during Blackbody Temperature Changes. In Proceedings of the SPIE, San Diego, CA, USA, 21–23 August 2017. [Google Scholar]
- Wang, W.; Cao, C.; Ignatov, A.; Liang, X.; Li, Z.; Wang, L.; Zhang, B.; Blonski, S.; Li, J. Improving the Calibration of Suomi NPP VIIRS Thermal Emissive Bands during Blackbody Warm-Up/Cool-Down. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1977–1994. [Google Scholar] [CrossRef]
- Uprety, S.; Cao, C.; Xiong, X.; Wang, W.; Zhang, B.; Choi, T.; Blonski, S.; Shao, X. Improving S-NPP VIIRS Reflective Solar Band (RSB) calibration accuracy through reprocessing. Glob. Space-Based Inter-Calibration Syst. Q. Newsl. 2018, 12, 15. [Google Scholar]
- Uprety, S.; Cao, C.; Gu, Y.; Shao, X.; Blonski, S.; Zhang, B. Calibration improvements in S-NPP VIIRS DNB Sensor Data Record using version 2 reprocessing. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9602–9611. [Google Scholar] [CrossRef]
- Cao, C.; Sun, J.; Zhang, B.; Wang, Z.; Cao, C.; Weng, F.; Wang, M. Suomi-NPP VIIRS initial reprocessing improvements and validations in the reflective solar bands. In Earth Observing Systems XXII; International Society for Optics and Photonics: Bellingham, WA, USA, 2017; Volume 10402, p. 104021V. [Google Scholar]
- Wang, W.; Cao, C.; Bai, Y.; Blonski, S.; Schull, M.A. Assessment of the NOAA S-NPP VIIRS geolocation reprocessing improvements. Remote Sens. 2017, 9, 974. [Google Scholar] [CrossRef]
- Cao, C.; Zhang, B.; Shao, X.; Wang, W.; Uprety, S.; Choi, T.; Blonsky, S.; Gu, Y.; Bai, Y.; Lin, L.; et al. Mission-long Recalibrated Science Quality Suomi NPP VIIRS Radiometric Dataset using Advanced Algorithms for Time Series Studies. Remote Sens. 2021, 13, 1075. [Google Scholar] [CrossRef]
- Zou, C.-Z.; Zhou, L.; Lin, L.; Sun, N.; Chen, Y.; Flynn, L.E.; Zhang, B.; Cao, C.; Iturbide-Sanchez, F.; Beck, T.; et al. The Reprocessed Suomi NPP Satellite Observations. Remote Sens. 2020, 12, 2891. [Google Scholar] [CrossRef]
- Thuillier, G.; Hersé, M.; Labs, D.; Foujols, T.; Peetermans, W.; Gillotay, D.; Simon, P.C.; Mandel, H. The Solar Spectral Irradiance from 200 to 2400 nm as Measured by the SOLSPEC Spectrometer from the ATLAS and EURECA Missions. Sol. Phys. 2003, 214, 1–22. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Platnick, S.; Bhartia, P.; Duncan, B.; L’Ecuyer, T.; Heidinger, A.; Skofronick-Jackson, G.; Loeb, N.; Schmidt, T.; Smith, W. Satellites see the world’s atmosphere. Meteorol. Monogr. 2018, 59. [Google Scholar] [CrossRef]
- Brun, F.; Dumont, M.; Wagnon, P.; Berthier, E.; Azum, M.; Shea, J.; Sirguey, P.; Rabatel, A.; Ramanathan, A. Seasonal changes in surface albedo of Himalayan glaciers from MODIS data and links with the annual mass balance. Cryosphere 2015, 9, 341–355. [Google Scholar] [CrossRef]
- Lehnert, L.; Thies, B.; Bendix, J. A new high spatial low stratus/fog retrieval for the Atacama Desert. Remote Sens. Environ. 2020, 236, 111445–111455. [Google Scholar] [CrossRef]
- Uddstrom, M.; Gray, W.; Murphy, R.; Oien, N.; Murray, T.A. Bayesian cloud mask for sea surface temperature retrieval. J. Atmos. Ocean Technol. 1999, 16, 117–133. [Google Scholar] [CrossRef]
- Liu, R.; Liu, Y. Generation of new cloud masks from MODIS land surface reflectance products. Remote Sens. Environ. 2013, 133, 21–37. [Google Scholar] [CrossRef]
- Rossow, W.; Walker, A.; Garder, L. Comparison of ISCCP and other cloud amounts. J. Clim. 1993, 6, 2394–2418. [Google Scholar] [CrossRef]
- Frey, R.; Ackerman, S.; Soden, B. Climate parameters from satellite spectral measurements. Part I: Collocated AVHRR and HIRS/2 observations of spectral greenhouse parameter. J. Clim. 1996, 9, 327–344. [Google Scholar] [CrossRef][Green Version]
- Minnis, P.; Young, D.; Spangenberg, D.; Heck, P.; Doelling, D.; Trepte, Q.; Chen, Y. Cloud mask for CERES from VIRS on the TRMM satellite. In Proceedings of the ALPS 99 Symposium, Meribel, France, 18–22 January 1999; WK-P-06. pp. 1–4. [Google Scholar]
- Heidinger, A.; Evan, A.; Foster, M.; Walther, A. A naïve Bayesian cloud-detection scheme derived from CALIPSO and applied within PATMOS-x. J. Appl. Meteorol. Clim. 2012, 51, 1129–1144. [Google Scholar] [CrossRef]
- Heidinger, A.; Straka, W.C. Algorithm Theoretical Basis Document: ABI Cloud Mask. NOAA NESDIS Center for Satellite Applications and Research. Ver. 3.0. 2012. Available online: https://www.star.nesdis.noaa.gov/goesr/documents/ATBDs/Baseline/ATBD_GOES-R_Cloud_Mask_v3.0_July2012.pdf (accessed on 25 June 2021).
- Heidinger, A.; Botambekov, D.; Walther, A. A Naïve Bayesian Cloud Mask Delivered to NOAA Enterprise. Ver. 1.2. 2016. Available online: https://www.star.nesdis.noaa.gov/goesr/documents/ATBDs/Enterprise/ATBD_Enterprise_Cloud_Mask_v1.2_Oct2016.pdf (accessed on 25 June 2021).
- Rosenfeld, D.; Liu, G.; Yu, X.; Zhu, Y.; Dai, J.; Xu, X.; Yue, Z. High-resolution (375 m) cloud microstructure as seen from the NPP/VIIRS satellite imager. Atmos. Chem. Phys. 2014, 14, 2479–2496. [Google Scholar] [CrossRef]
- Okada, Y.; Mukai, S.; Sano, I. Modified Cloud Flag for SeaWiFS Data over Turbid Water Regions. Geophys. Res. Lett. 2003, 30, 1–4. [Google Scholar] [CrossRef]
- Nordkvist, K.; Loisel, H.; Gaurier, L.D. Cloud Masking of SeaWiFS Images over Coastal Waters Using Spectral Variability. Opt. Express. 2009, 17, 12246–12258. [Google Scholar] [CrossRef] [PubMed]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A Multi-Temporal Method for Cloud Detection, Applied to FORMOSAT-2, Venμs, LANDSAT and SENTINEL-2 Images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef]
- Banks, A.C.; Mélin, F. An assessment of cloud masking schemes for satellite ocean colour data of marine optical extremes. Int. J. Remote Sens. 2015, 36, 797–821. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Csiszar, I. Early evaluation of the VIIRS calibration, cloud mask and surface reflectance Earth data records. Remote Sens. Environ. 2014, 148, 134–145. [Google Scholar] [CrossRef]
- Franch, B.; Vermote, E.F.; Roger, J.C.; Murphy, E.; Becker-Reshef, I.; Justice, C.; Claverie, M.; Nagol, J.; Csiszar, I.; Meyer, D.; et al. A 30+ year AVHRR land surface reflectance climate data record and its application to wheat yield monitoring. Remote Sens. 2017, 9, 296. [Google Scholar] [CrossRef]
- Coluzzi, R.; Imbrenda, V.; Lanfredi, M.; Simoniello, T. A first assessment of the Sentinel-2 Level 1-C cloud mask product to support informed surface analyses. Remote Sens. Environ. 2018, 217, 426–443. [Google Scholar] [CrossRef]
- Frey, R.A.; Ackerman, S.A.; Holz, R.E.; Dutcher, S.; Griffith, Z. The continuity MODIS-VIIRS cloud mask. Remote Sens. 2020, 12, 3334. [Google Scholar] [CrossRef]
- Chi, Y.; Zhang, T. Validation and Comparison Among Different VIIRS Cloud Mask Products. In Geoinformatics in Sustainable Ecosystem and Society; Springer: Singapore, 2019; pp. 83–92. [Google Scholar]
- Chen, N.; Li, W.; Gatebe, C.; Tanikawa, T.; Hori, M.; Shimada, R.; Aoki, T.; Stamnes, K. New neural network cloud mask algorithm based on radiative transfer simulations. Remote Sens. Environ. 2018, 219, 62–71. [Google Scholar] [CrossRef]
- White, C.H.; Heidinger, A.K.; Ackerman, S.A. Evaluation of Visible Infrared Imaging Radiometer Suite (VIIRS) neural network cloud detection against current operational cloud masks. Atmos. Meas. Tech. 2021, 14, 3371–3394. [Google Scholar] [CrossRef]
- Sun, L.; Yang, X.; Jia, S.; Jia, C.; Wang, Q.; Liu, X.; Wei, J.; Zhou, X. Satellite data cloud detection using deep learning supported by hyperspectral data. Int. J. Remote Sens. 2020, 41, 1349–1371. [Google Scholar] [CrossRef]
- Kopp, T.J.; Thomas, W.; Heidinger, A.K.; Botambekov, D.; Frey, R.A.; Hutchison, K.D.; Iisager, B.D.; Brueske, K.; Reed, B. The VIIRS Cloud Mask: Progress in the first year of S-NPP toward a common cloud detection scheme. J. Geophys. Res.-Atmos. 2014, 119, 2441–2456. [Google Scholar] [CrossRef]
- Ackerman, S.A.; Frey, R.A.; Menzel, W.P.; Gumley, L.; Moeller, C.C.; Strabala, K.I.; Tobin, D.; Heidinger, A. MODIS Cloud Mask: Approach, Results, and Validation. 2002. Available online: https://cimss.ssec.wisc.edu/itwg/itsc/itsc13/thursday/ackerman_poster.pdf (accessed on 25 June 2021).
- Wielicki, B.A.; Baum, B.A.; Coakley, J.A.; Green, R.N.; Hu, Y.; King, M.D.; Lin, B.; Kratz, D.P.; Minnis, P.; Stowe, L.L. Clouds and the Earth’s Radiant Energy System (CERES) Algorithm Theoretical Basis Document Overview of Cloud Retrieval and Radiative Flux Inversion (Subsystem 4.0). 1997. Available online: https://ceres.larc.nasa.gov/documents/ATBD/pdf/r2_2/ceres-atbd2.2-s4.0.pdf (accessed on 25 June 2021).
- Key, R.J. The Cloud and Surface Parameter Retrieval (CASPR) System for Polar AVHRR User’s Guide v4.0. 2003. Available online: http://library.ssec.wisc.edu/research_Resources/publications/pdfs/SSECPUBS/SSEC_Publication_No_02_01_K1.pdf (accessed on 25 June 2021).
- Kossin, J.P.; Matthew, S. An objective model for identifying secondary eyewall formation in hurricanes. Mon. Wea. Rev. 2009, 137, 876–892. [Google Scholar] [CrossRef]
- Liu, C.; Reynolds, R.W.; Hall, A.D.; Banzon, V. The Optimum Interpolation Sea Surface Temperature (OISST) From Research to Operation. In AGU Fall Meeting Abstracts; American Geophysical Union: San Francisco, CA, USA, 2011; Available online: https://ui.adsabs.harvard.edu/abs/2011AGUFMIN11B1274L/abstract (accessed on 25 June 2021).
- Ramsay, B.H. The interactive multisensor snow and ice mapping system. Hydrol. Process. 1998, 12, 1537–1546. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VIIRS Band and Wavelength (µm) | ABI Band and Wavelength (µm) | SEVIRI Band and Wavelength (µm) |
|---|---|---|
| M5 (0.672) | 2 (0.64) | 1 (0.64) |
| M7 (0.865) | ||
| M9 (1.378) | 4 (1.37) | |
| M10 (1.61) | 5 (1.61) | 3 (1.64) |
| M12 (3.70) | 7 (3.90) | 4 (3.92) |
| 9 (6.93) | ||
| 10 (7.34) | ||
| M14 (8.55) | 11 (8.44) | 7 (8.70) |
| M15 (10.763) | 14 (11.21) | 9 (10.80) |
| M16 (12.013) | 15 (12.29) | 10 (12.00) |
| DNB (0.7) |
| Operational | Clear | Probably Clear | Probably Cloudy | Cloudy | |
|---|---|---|---|---|---|
| Reprocessed | |||||
| Clear | 4,227,726 | 10,150 | 0 | 0 | |
| Probably Clear | 1935 | 380,084 | 9156 | 0 | |
| Probably Cloudy | 3 | 2049 | 515,177 | 8617 | |
| Cloudy | 4 | 2 | 2435 | 9,588,262 | |
| Operational | Clear | Probably Clear | Probably Cloudy | Cloudy | |
|---|---|---|---|---|---|
| Reprocessed | |||||
| Clear | 739,311,193 | 1,424,287 | 18,845 | 4808 | |
| Probably Clear | 732,226 | 149,238,446 | 1,141,409 | 41,737 | |
| Probably Cloudy | 5117 | 587,786 | 185,431,688 | 1,071,928 | |
| Cloudy | 385 | 2022 | 547,127 | 1,407,532,196 | |
| Operational | 0 | (0, 0.5] | (0.5, 1.0) | 1.0 | |
|---|---|---|---|---|---|
| Reprocessed | |||||
| 0 | 4,140,839 | 10,520 | 0 | 0 | |
| (0, 0.5] | 1944 | 466,592 (292,216) | 9156 | 0 | |
| (0.5, 1.0) | 0 | 2058 | 1,396,398 (764,337) | 10,843 | |
| 1.0 | 0 | 0 | 3376 | 8,703,874 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Hao, X.; Zhang, B.; Zou, C.-Z.; Cao, C. Assessment of the Reprocessed Suomi NPP VIIRS Enterprise Cloud Mask Product. Remote Sens. 2021, 13, 2502. https://doi.org/10.3390/rs13132502
Lin L, Hao X, Zhang B, Zou C-Z, Cao C. Assessment of the Reprocessed Suomi NPP VIIRS Enterprise Cloud Mask Product. Remote Sensing. 2021; 13(13):2502. https://doi.org/10.3390/rs13132502
Chicago/Turabian StyleLin, Lin, Xianjun Hao, Bin Zhang, Cheng-Zhi Zou, and Changyong Cao. 2021. "Assessment of the Reprocessed Suomi NPP VIIRS Enterprise Cloud Mask Product" Remote Sensing 13, no. 13: 2502. https://doi.org/10.3390/rs13132502
APA StyleLin, L., Hao, X., Zhang, B., Zou, C.-Z., & Cao, C. (2021). Assessment of the Reprocessed Suomi NPP VIIRS Enterprise Cloud Mask Product. Remote Sensing, 13(13), 2502. https://doi.org/10.3390/rs13132502