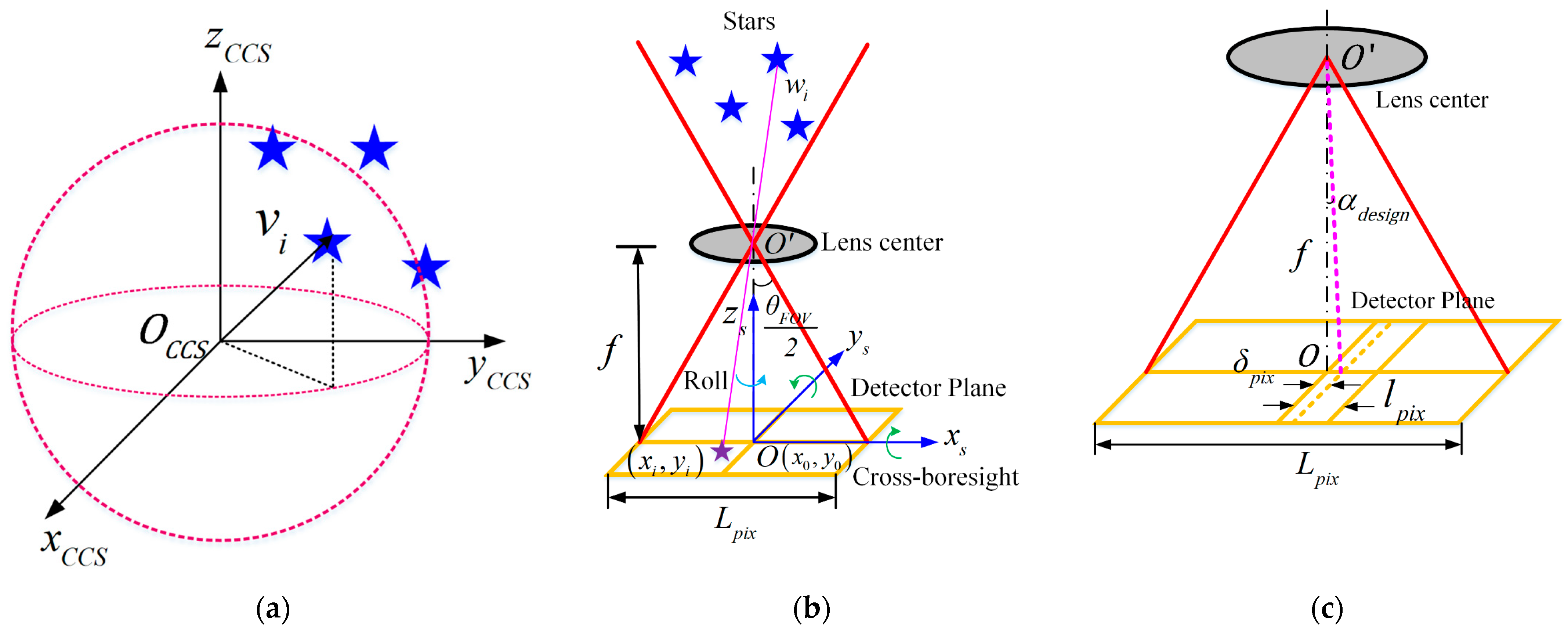
3.1. The Measuring Principle of Star Tracker
Figure 2 shows the measuring principle of star tracker. When the star tracker is in a certain attitude matrix
in the celestial coordinate system, the navigation star
can be measured by using the pinhole imaging principle. The direction vector corresponding to the celestial coordinate system is denoted as
in
Figure 2a. The direction vector in the star tracker coordinate system is
, as shown in
Figure 2b.
The coordinate of the optical axis center on the detector is
. The coordinate of navigation star
on the detector is
. Assume the focal length is
, the expression of the vector
can be obtained [
26] as Equation (1).
In the ideal case, the relationship can be expressed as the following equation.
When more than two stars are observed, the attitude matrix
of star tracker can be directly solved by quaternion optimal estimation QUEST [
27] or other methods. The optimal attitude matrix
can be obtained so that objective function
can reach the minimum value as is described in Equation (3):
where
denotes the weighting coefficient and satisfies
. The optimal estimation,
of the star tracker attitude matrix in inertial space can be obtained.
3.2. The Analysis of Accuracy and Dynamic Performance
The key in achieving high-accuracy star tracker is the size of star spot on the detector. If the size of the star spot imaging on the detector occupies not less than
pixels, the star spot extraction accuracy,
can reach sub-pixel levels [
28]. The constraint relationship between the accuracy index,
, of star tracker and related optical parameters is described in Equation (4):
where
Figure 2c,
, denotes the
design accuracy and
denotes the 0.1 pixel length of the detector. According to Equation (4), long focal length and small detector size will result in a small
, thus achieving high accuracy of the star tracker. However, changing the focal length will also affect the angle of field of view
. The mathematical expression of
is described as follows:
where
denotes the number of pixels in one direction of the detector. If the
is too small, the number of navigation stars in the field of view will be reduced to further decrease the accuracy of the star tracker. However, if the
is too large, too many navigation stars will be obtained and this affects the computing time of the processor. Therefore, the focal length and the detector size need to be balanced.
However, the star spots imaging will be affected by many factors and mainly by spatial stray light and satellite dynamic rotation. As shown in
Figure 3, spatial stray light and satellite rotation will separately cause star spots to be corrupted and observed to be trailing, thus leading to failure in obtaining star spot coordinates and further attitude problems. In order to achieve highly-accurate star spot extraction, it is necessary to ensure that stars can be imaged accurately. Therefore, the factors affecting star spot imaging should be analyzed.
It is assumed that the image size of a star spot is
. The average star energy
collected by a single pixel of star tracker detector can be expressed by Equation (6) in the following:
where
denotes the correction factor related to the lens,
denotes the intensity of starlight,
denotes the aperture of the lens and
denotes the exposure time of the detector.
Due to sunlight and the earth-atmosphere light in space, the stray light will be imaged on the detector through the lens. The stray light can be regarded as a surface light source, then the average stray light energy,
, received by a single pixel of the detector is approximately expressed as Equation (7) in the following:
where
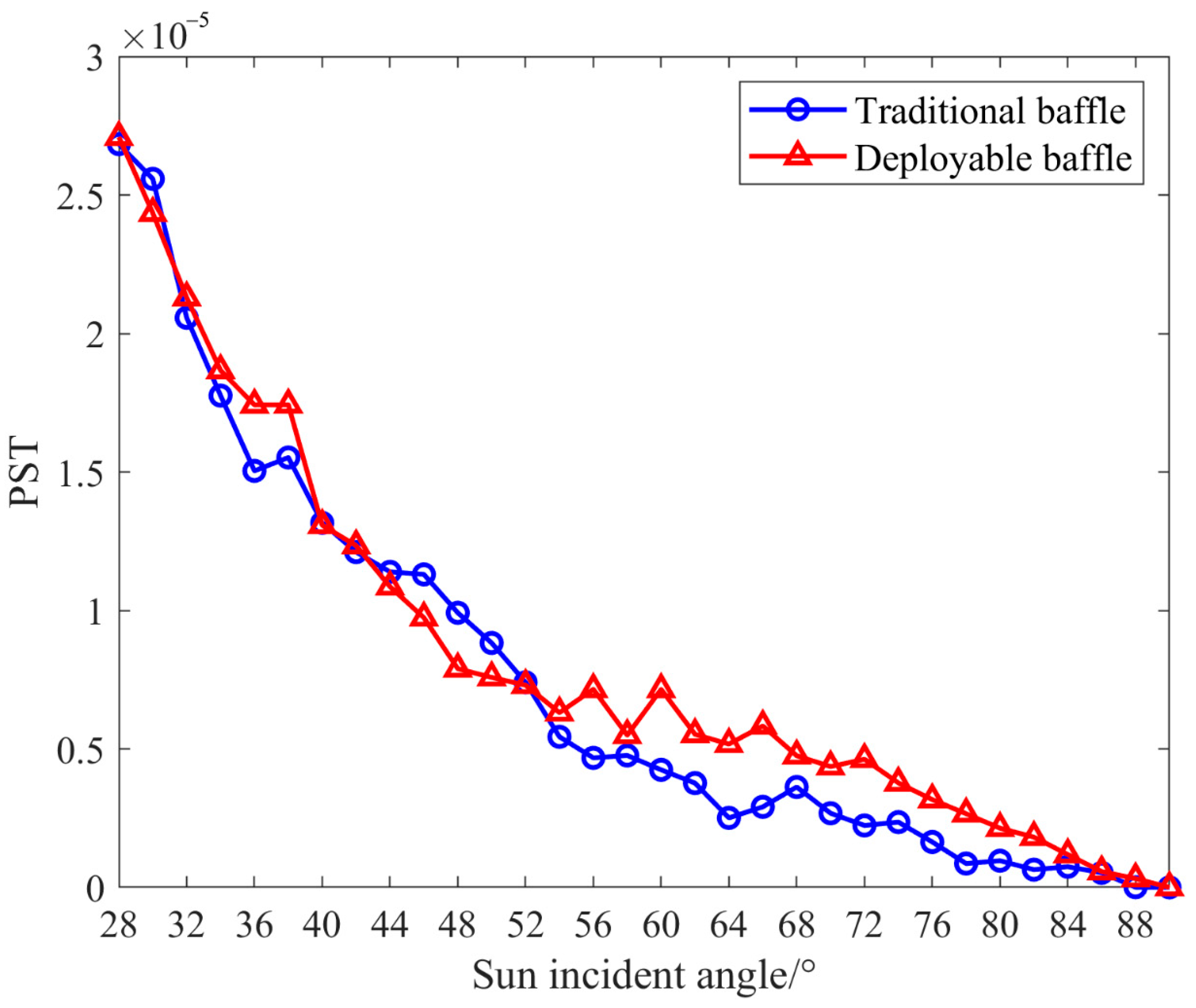
denotes the correction coefficient related to the imaging system,
denotes the stray light suppression rate of the baffle and
denotes the luminance of stray light. In order to extract star spot coordinates from stray light, it is guaranteed that
.
When the satellite rotates, the star tracker will rotate at a certain angular velocity
. At this time, the average star energy
received by a single pixel of the detector can be expressed as Equation (8) in the following:
where
denotes the total energy on the detector,
denotes the region of star spots imaging and
denotes average star spot imaging width on the detector. In order to image the star spot at a higher angular velocity, it is known from Equation (8) that a decrease in exposure time is required to reduce the area of star spots imaging. However, the total energy received by the detector will also be decreased as the exposure time becomes smaller. Therefore, a larger lens aperture,
, is needed to ensure the sufficient star energy.
Whatever the angular velocity, the energy of star spots is far less than that of stray light. If there is no baffle, the star spot would be corrupted by the stray light to further affect the star identification. Therefore, a baffle must be installed in front of the lens to suppress the stray light. The baffle design for length and outer aperture diameter is shown in
Figure 4. According to the geometric principle of the baffle design, the length of the baffle is calculated as described in Equation (9):
where
denotes the earth aspect angle of the baffle to prevent weak stray light, especially the earth-atmosphere light, from entering the aperture directly and
denotes the half-FOV angle of the star tracker. The calculation of the outer aperture,
, of the baffle can be expressed as Equation (10) combined with Equation (9).
As shown in
Figure 5, when the earth aspect angle is fixed, the length of the baffle and the outer aperture will increase with increased half-FOV angle. When the half-FOV angle is fixed, the ability of the star tracker to suppress stray light is enhanced but the baffle length and the outer aperture increase with the decreased earth aspect angle. Therefore, the TST usually has a longer baffle due to the small earth aspect angle.
According to the structure of the star tracker and combining Equations (9) and (10), the theoretical volume of the TST can be expressed in Equation (11) as follows:
where
denotes the F-number of lens,
denotes the ratio between the manufacturing diameter and the outer aperture diameter and
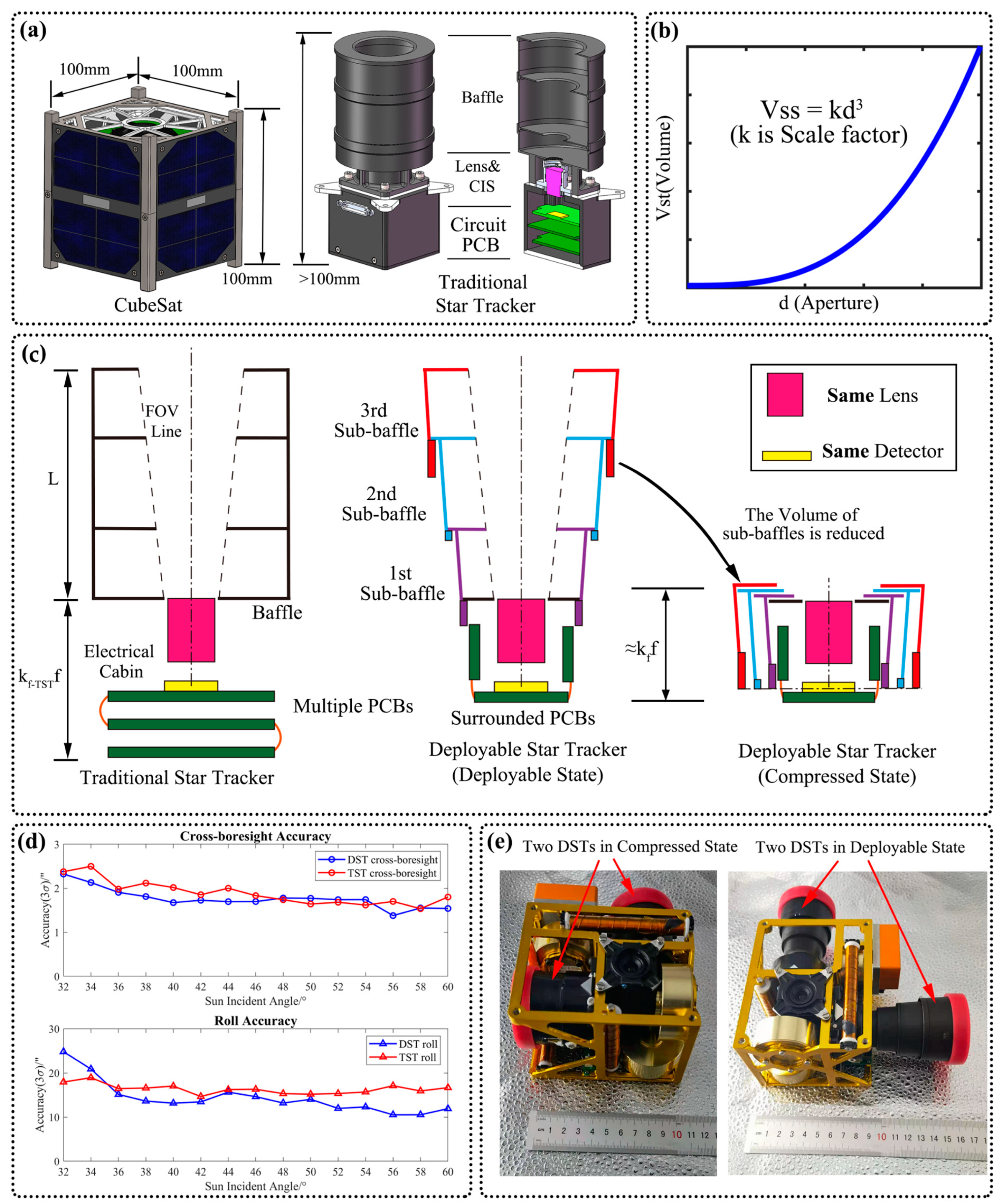
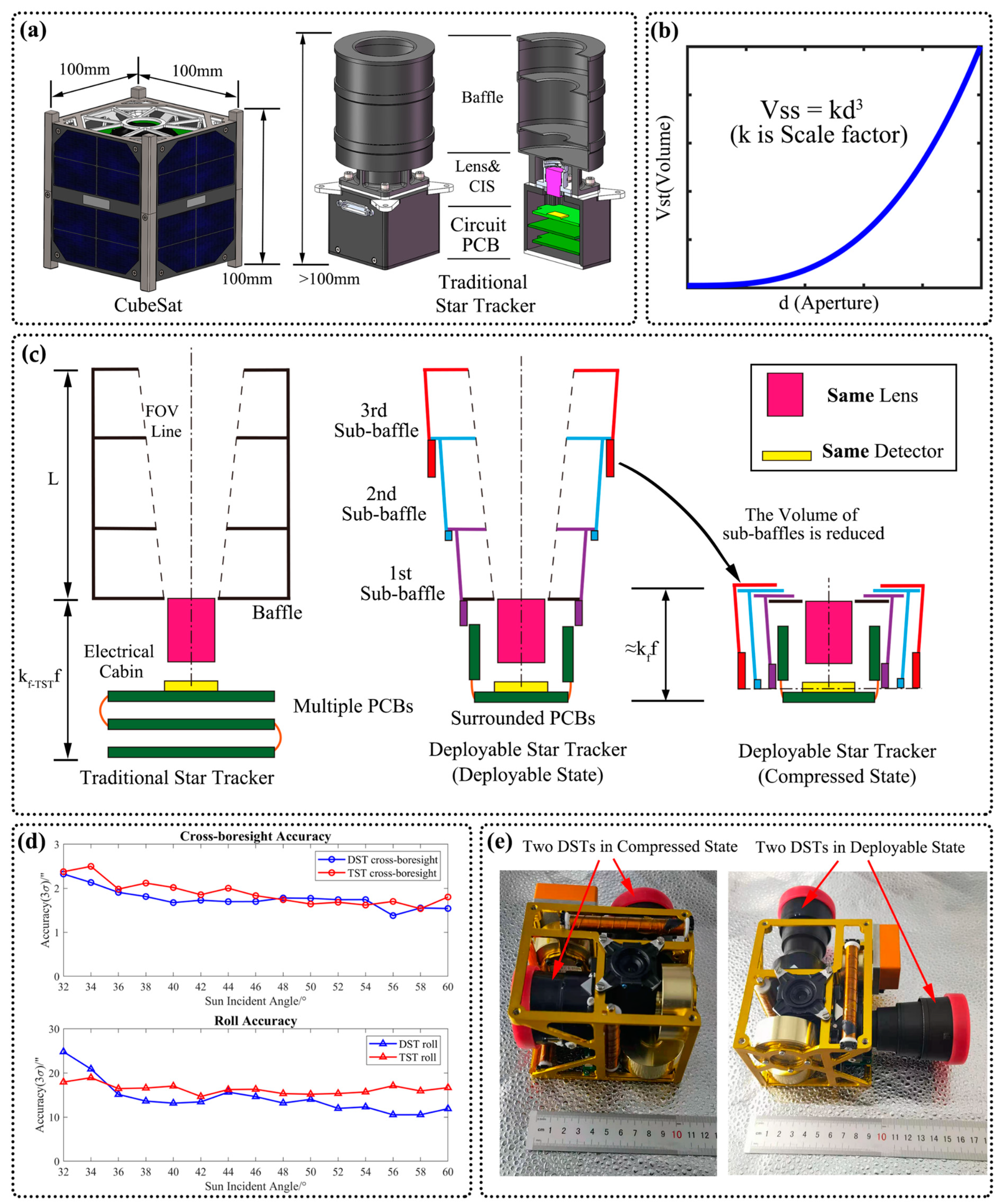
denotes the coefficient describing the relationship between the focal length and the length of the electronic cabin. It is obvious from the Equation (11) that the volume of traditional star tracker is cubic with the aperture of the lens.
To sum up, as is shown
Figure 6, improving the pointing accuracy and dynamic performance of the star tracker will increase the aperture, which will further increase the length of the baffle and eventually increase the volume of the star tracker. If the volume of the baffle can be compressed by using an optimization model according to Equation (11), the length of the star tracker will be independent of the baffle no matter how the aperture is increased.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}