
Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images


Abstract
1. Introduction
- Extend the technique to a different radar band (C-band) and lower resolution images (Sentinel-1);
- Get further insight into the capabilities and the limitations of the approach for wake pattern recognition in difference scenarios.
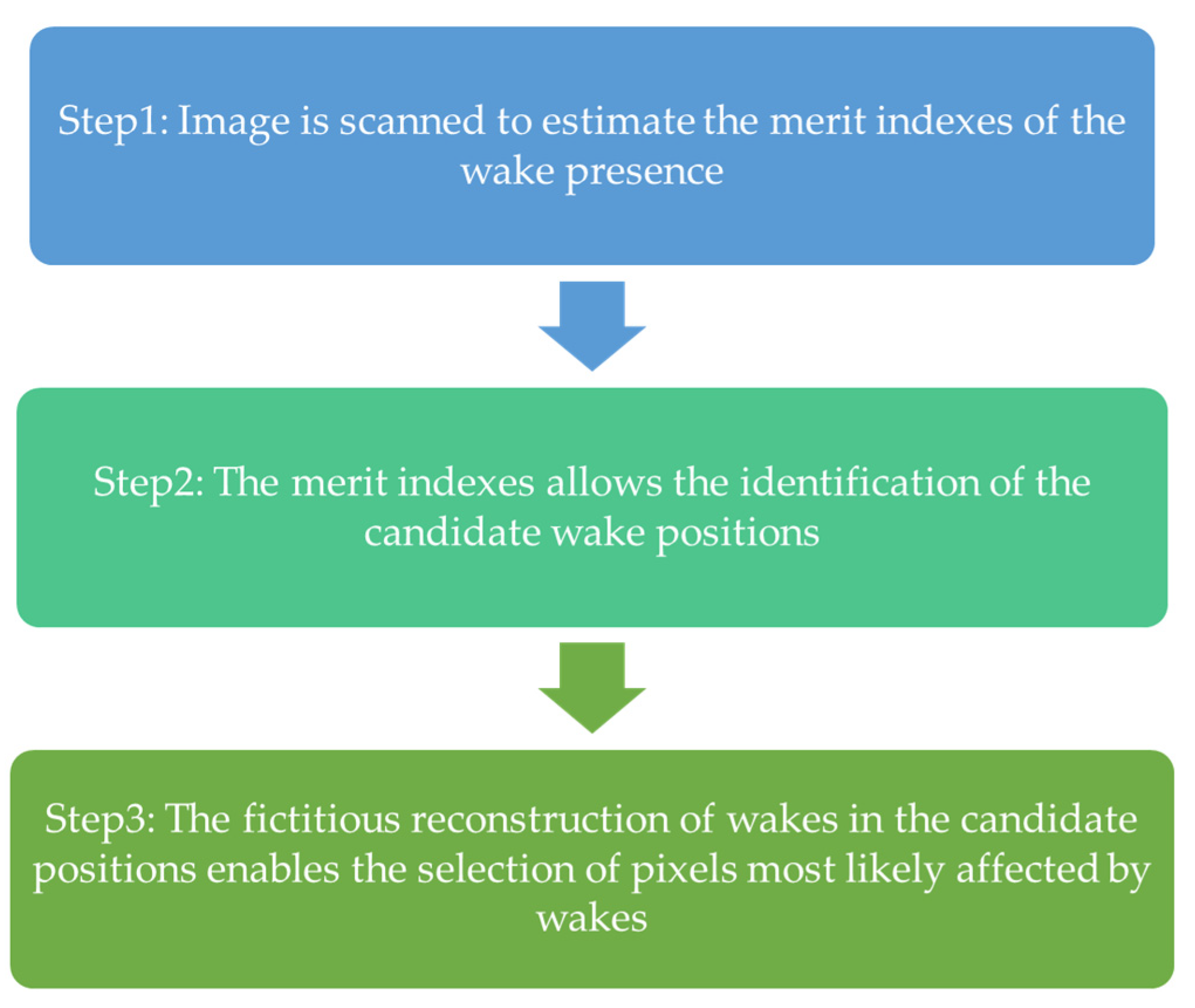
2. Method
3. Results
3.1. Dataset
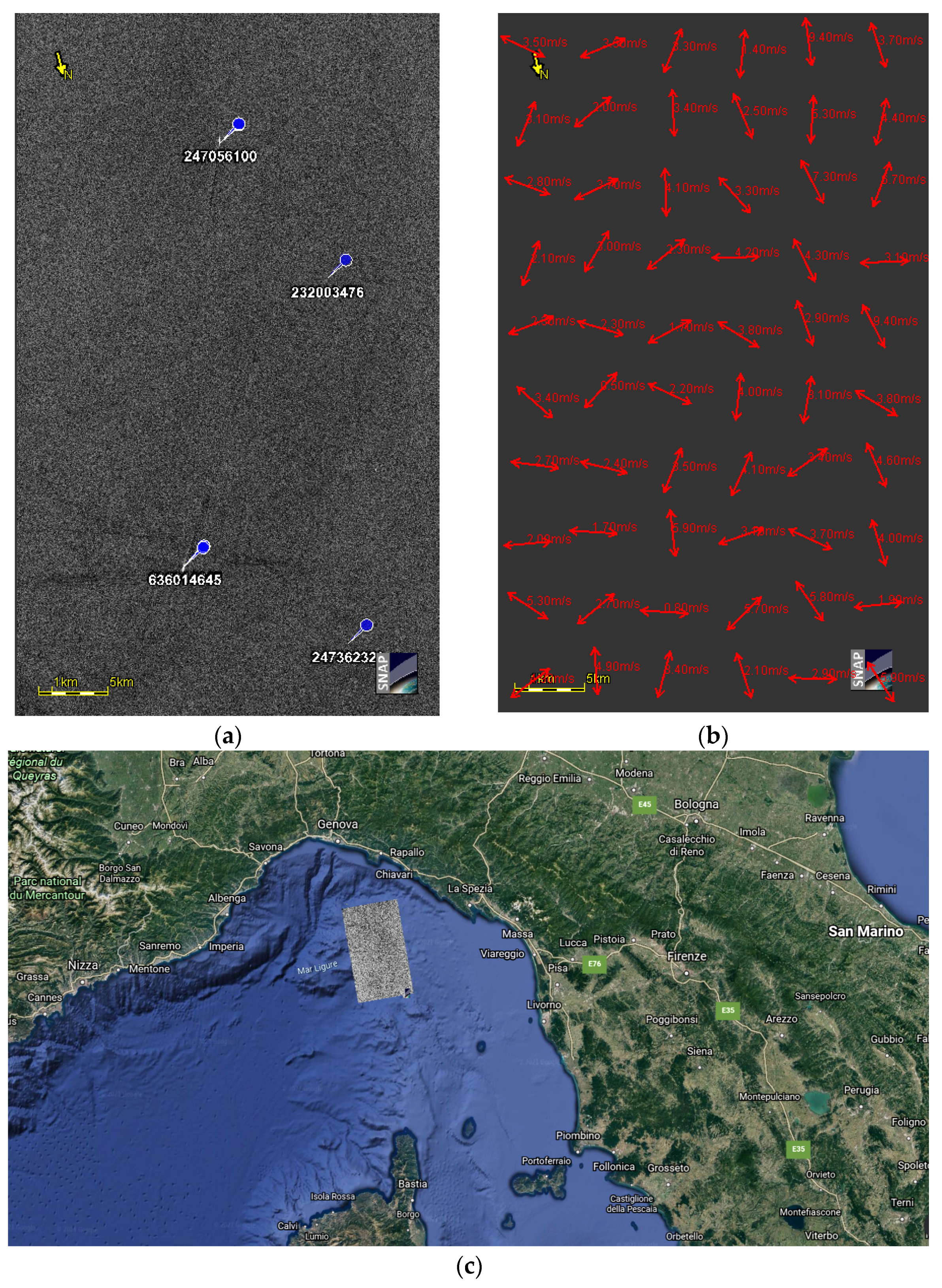
- Scenario 1: wakes generated by GoFast-like ships in a homogeneous wind speed area. Figure 2a is a tile of the image acquired on 6 July 2020. Four ships are included in the tile: ship 247056100 has a velocity of 22.6 knots and LBR of 7.5, so it is classified as GoFast-like ship, whereas the other three ships moves slower than 15 knots (ship 636014645 has a velocity of 13.1 knots and LBR of 3.5, ship 232003476 and ship 2473622320 have LBR of 3.5 and velocity of about 7 knots). Figure 2b shows the wind field, whose speed values over the tile range from 1.6 to 4.5 m/s, whereas Figure 2c portrays the location map of the scenario.
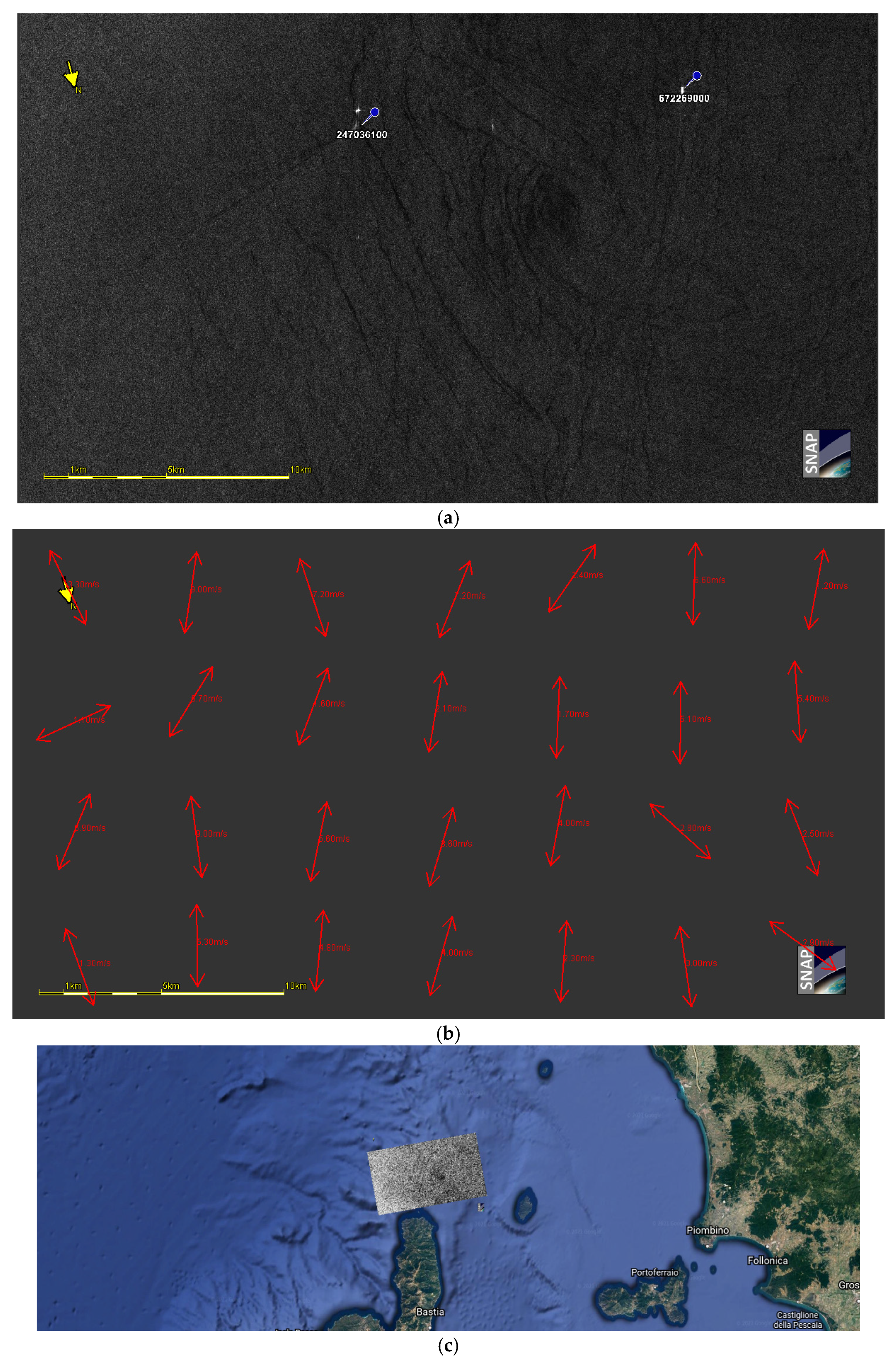
- Scenario 2: wakes generated by GoFast-like ships in a sea area affected by natural surface film [38]. The tile (Figure 3a) of the image gathered on 18 July 2020 is characterized by a sea area with natural surface film and three distinguishable wakes. The leftmost ship (2470036100) has a velocity of 25 knots and LBR of 7.04, and the rightmost ship has a velocity of 18.4 knots and LBR of 5.6, so they can be both considered as GoFast-like ships. In addition, a non-collaborative ship is moving between the previous two ships. Figure 3b shows the estimation of wind field over the tile, whereas Figure 3c portrays the location map of the scenario.
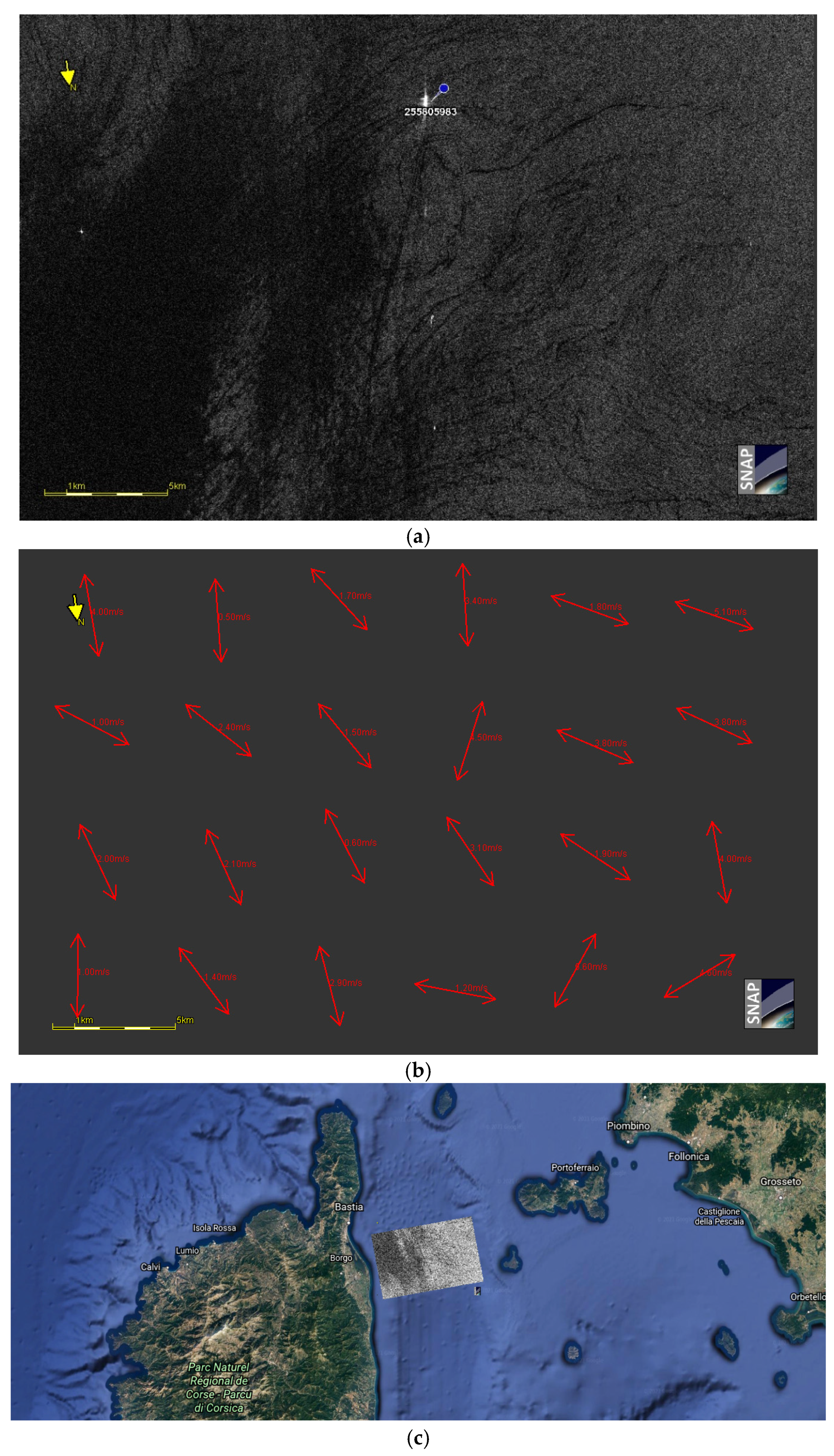
- Scenario 3: wakes generated by GoFast-like ships close to a low wind speed area. In Figure 4a, ship 255805983 has a velocity of 21 knots and LBR of 7.9. It moves along an almost azimuthal direction (162°N) close to an area with low wind speed. In details, the wind speed (Figure 4b) reduces from about 2 m/s around the ship until 0.3 m/s in the dark area of the tile. With specific reference to this scenario an additional case is analyzed in Section 3 for which the transition between dark and bright areas is even clearer.
3.2. Detection Performance Estimation
4. Discussion and Conclusions
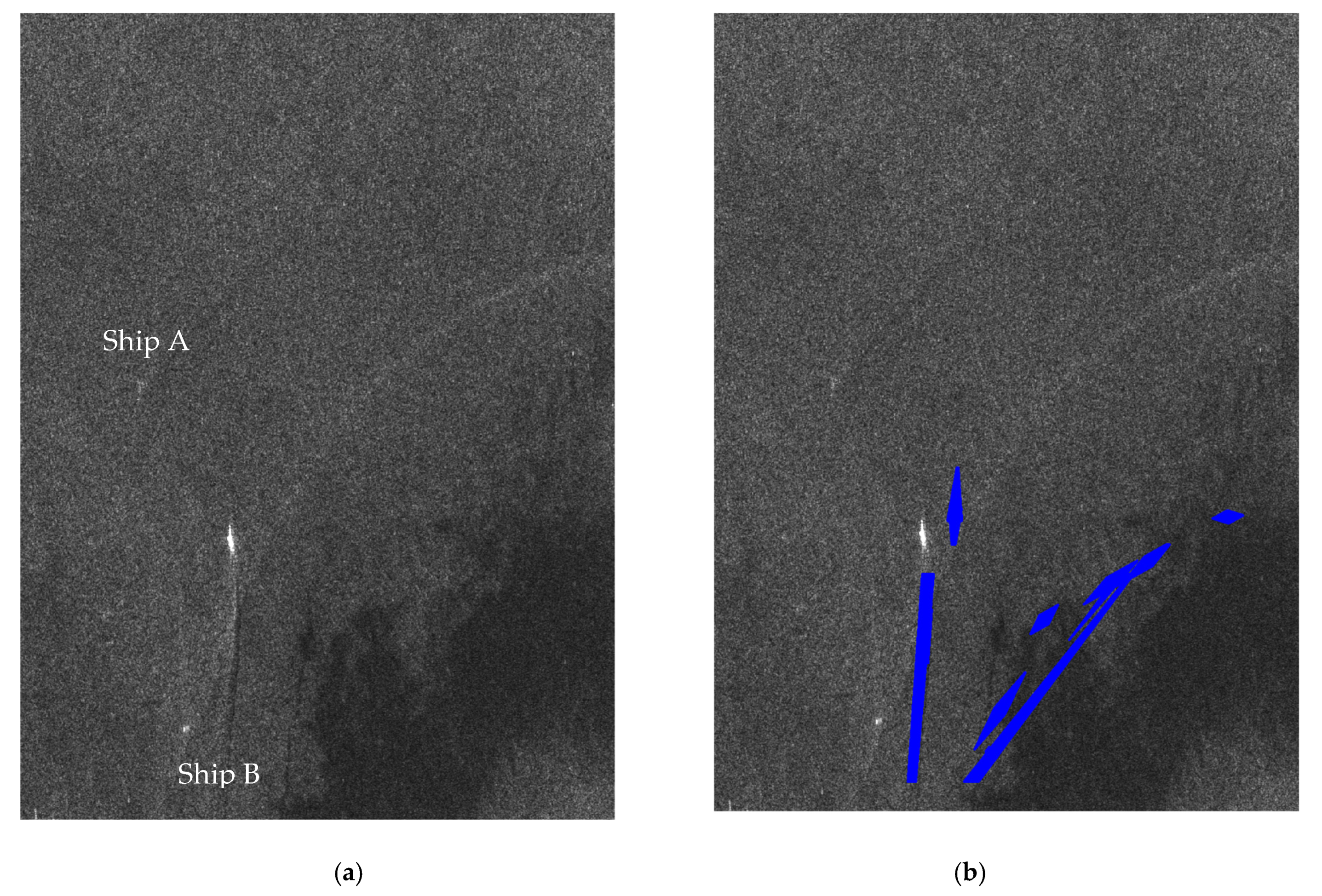
- The best applicative scenario is the one characterized by homogeneous sea clutter, in which a 100% of success rate of wake identification is observed, with no missed wakes.
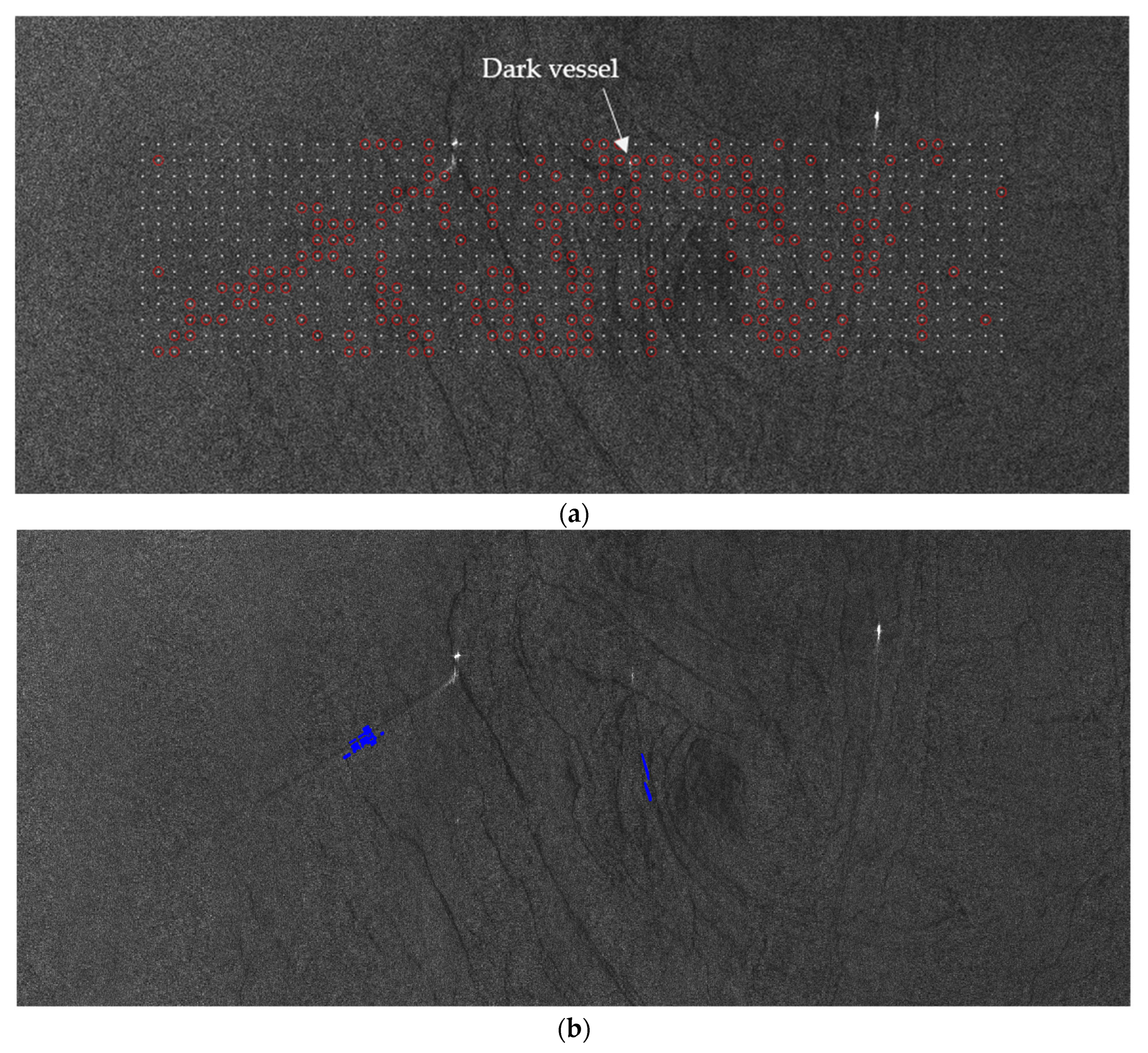
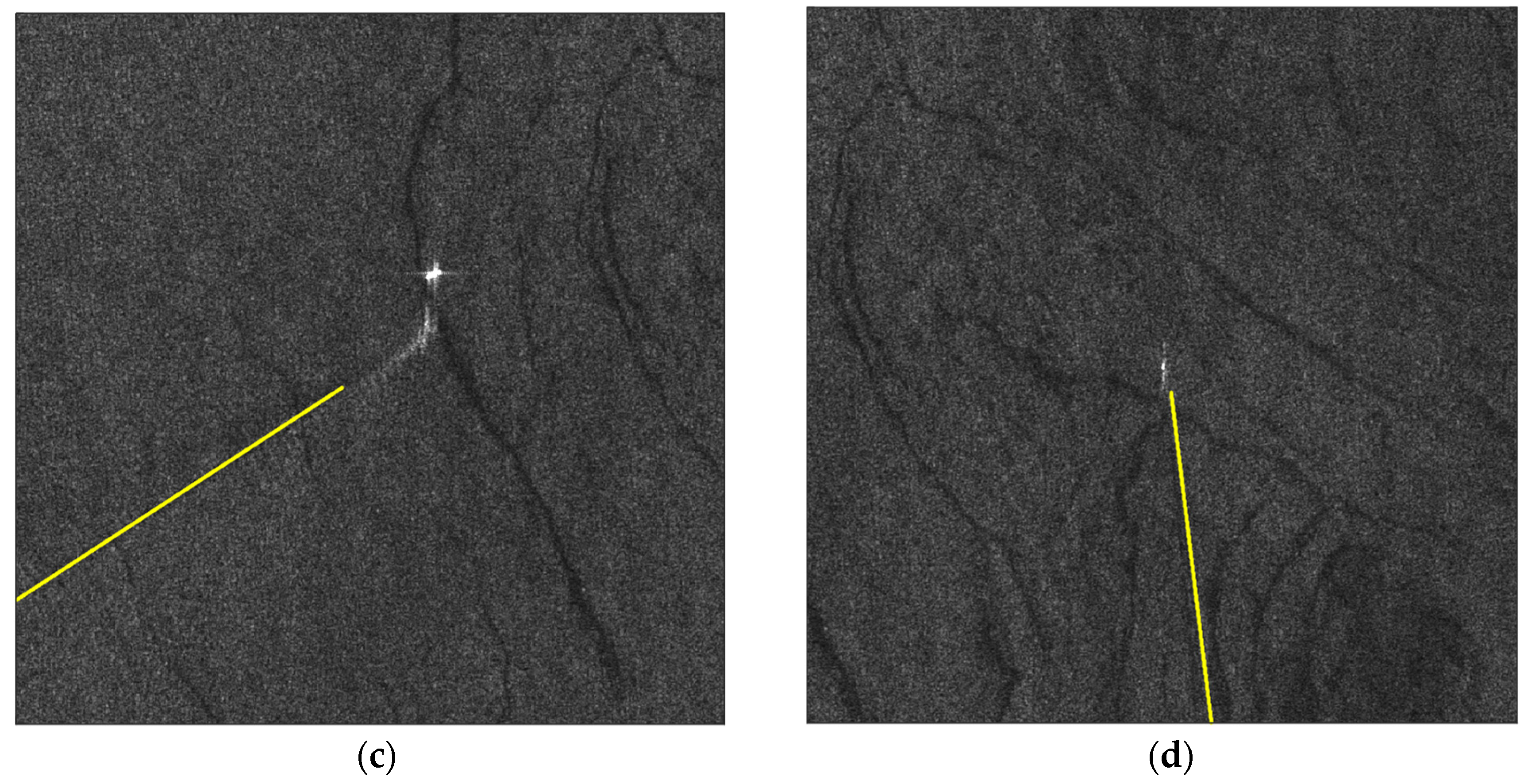
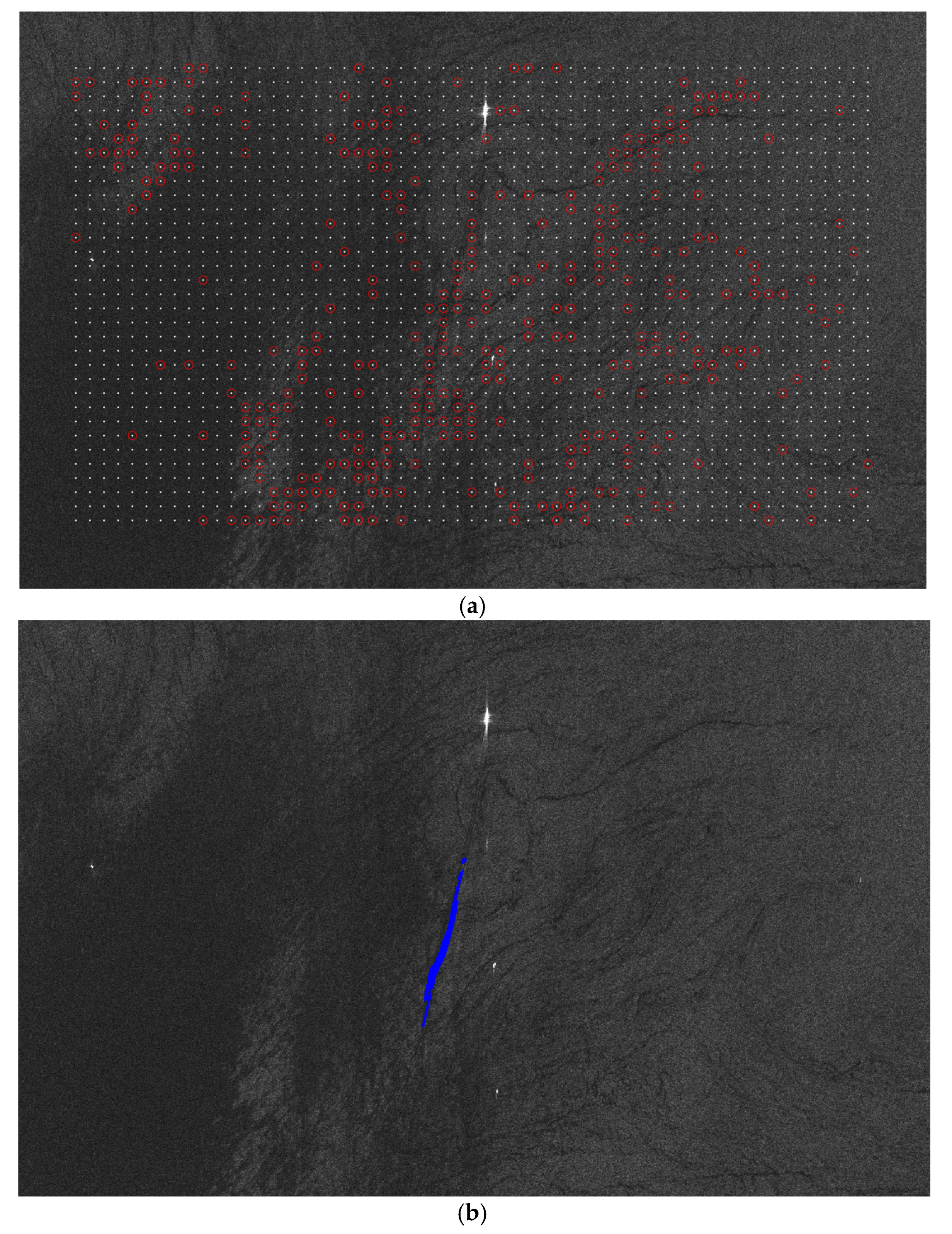
- When the scenarios include prominent linear features (i.e., natural surface film almost linear or sharp linear transitions from bright to dark image portions), the detection rate is affected. In details, we have observed that in one out of three scenarios with natural surface film, the wake detection shows false alarms, because the dark features related to natural surface film is recognized as wake due to almost linear shape in the tile. Instead, the area with low wind speed is well managed by the proposed techniques, which does not provide any false detections related to brighter spots in the dark low speed areas. The attention, in this scenario, shall be paid to the transition edge from dark to bright sea: if the border is almost linear in the tile, it can lead to false wake identification, as the one shown in Figure 8. This has occurred in one out of three tested trials.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- G.W. Bush Administration, National Security Presidential Directive. 2004. Available online: https://fas.org/irp/offdocs/nspd/index.html (accessed on 10 May 2021).
- Crisp, D.J. The State-Of-The-Art in Ship Detection in Synthetic Aperture Radar Imagery. 2004. Available online: https://www.researchgate.net/publication/27253731_The_state-of-the-art_in_ship_detection_in_Synthetic_Aperture_Radar_imagery (accessed on 16 May 2021).
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.-X.; Kourti, N.; Argentieri, P. The SUMO Ship Detector Algorithm for Satellite Radar Images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef]
- MARISA. Available online: https://www.marisaproject.eu/ (accessed on 30 June 2020).
- OSIRIS—ESA. Available online: http://wiki.services.eoportal.org/tiki-index.php?page=OSIRIS (accessed on 30 June 2020).
- Graziano, M.D.; D’Errico, M.; Razzano, E. Maritime surveillance by integrating remote sensing and AIS: A preliminary analysis. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Greidanus, H. Satellite imaging for maritime surveillance of the European seas. In Remote Sensing of the European Seas; Springer: Dordrecht, The Netherlands, 2008; ISBN 9781402067716. [Google Scholar]
- Reggiannini, M.; Bedini, L. Multi-Sensor Satellite Data Processing for Marine Traffic Understanding. Electronics 2019, 8, 152. [Google Scholar] [CrossRef]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Lorenzzetti, J.A.; Paes, R.L.; Gherardi, D.M. A Performance Comparison of a CFAR Ship Detection Algorithm Using Envisat, Radarsat, Cosmo-Skymed And Terrasar-X Images. In Proceedings of the SeaSAR 2010, Frascati, Italy, 25–29 January 2010. [Google Scholar]
- Paes, R.L.; Lorenzzetti, J.A.; Gherardi, D.F.M. Ship detection using TerraSAR-X images in the Campos Basin (Brazil). IEEE Geosci. Remote Sens. Lett. 2010, 7, 545–548. [Google Scholar] [CrossRef]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colon, P.; Li, X. Automatic detection of ships in RADARSAT-1 SAR imagery. Can. J. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Pelich, R.; Longepe, N.; Mercier, G.; Hajduch, G.; Garello, R. Performance evaluation of Sentinel-1 data in SAR ship detection. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 2103–2106. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detectors exploiting spectral analysis of SAR images. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 978–981. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.; Hajnsek, I.; Ouchi, K. Ship Detection with Spectral Analysis of Synthetic Aperture Radar: A Comparison of New and Well-Known Algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Renga, A.; Graziano, M.D.; Moccia, A. Segmentation of Marine SAR Images by Sublook Analysis and Application to Sea Traffic Monitoring. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1463–1477. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Zhou, S.; Zou, H. Azimuth ambiguities removal in littoral zones based on multi-temporal SAR images. Remote Sens. 2017, 9, 866. [Google Scholar] [CrossRef]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L.W.; Meyer, R.G.V. Very deep learning for ship discrimination in Synthetic Aperture Radar imagery. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 104–107. [Google Scholar]
- Liu, Y.; Zhang, M.; Xu, P.; Guo, Z. SAR ship detection using sea-land segmentation-based convolutional neural network. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 18–21 May 2017; pp. 1–4. [Google Scholar]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual region-based convolutional neural network with multilayer fusion for SAR ship detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Soldi, G.; Gaglione, D.; Forti, N.; Di Simone, A.; Daffina, C.; Bottini, G.; Quattrociocchi, D.; Braca, P.; Carniel, S.; Willett, P.; et al. Space-based Global Maritime Surveillance. Part II: Artificial Intelligence and Data Fusion Techniques. IEEE Aerosp. Electron. Syst. Mag. 2020, in press. [Google Scholar]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- Kang, K.; Kim, D. Ship Velocity Estimation From Ship Wakes Detected Using Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4379–4388. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Karakuş, O.; Rizaev, I.; Achim, A. Ship Wake Detection in SAR Images via Sparse Regularization. IEEE Trans. Geosci. Remote Sens. 2019, 58, 1665–1677. [Google Scholar] [CrossRef]
- Taunton, D.; Hudson, D.; Shenoi, R. Characteristics of A series of high speed hard chine planing hulls—Part 1: Performance in calm water. Int. J. Small Cr. Technol. 2010, 152, 55–75. [Google Scholar]
- Frontex Technical Support for Testing and Evaluation of a New Copernicus Service. Available online: https://etendering.ted.europa.eu/cft/cft-document.html?locale=it&docId=32385 (accessed on 22 August 2020).
- Tunaley, J.K.E. Wakes from Go-Fast and Small Planing Boats; London Research and Development Corporation: Ottawa, ON, Canada, 2014. [Google Scholar]
- Tunaley, J. Smuggler and Pirate Go-Fast Boats; London Research and Development Corporation: Ottawa, ON, Canada, 2020. [Google Scholar]
- Tings, B.; Velotto, D. Comparison of ship wake detectability on C-band and X-band SAR. Int. J. Remote Sens. 2018, 39, 4451–4468. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Velotto, D.; Jacobsen, S. Extension of Ship Wake Detectability Model for Non-Linear Influences of Parameters Using Satellite Based X-Band Synthetic Aperture Radar. Remote Sens. 2019, 11, 563. [Google Scholar] [CrossRef]
- Graziano, M.D. Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sens. 2020, 12, 2869. [Google Scholar] [CrossRef]
- Bourbigot, M.; Piantanida, R. Sentinel-1 Product Definition. Collecte Localisation Satellites (CLS). 25 March 2016. Available online: https://sentinel.esa.int/documents/247904/1877131/Sentinel-1-Product-Definition (accessed on 16 May 2021).
- Mareografico. Available online: www.mareografico.it (accessed on 6 April 2021).
- SNAP. Available online: https://step.esa.int/main/toolboxes/snap/ (accessed on 24 October 2019).
- Huang, Z.; Huang, L.; Gong, Y.; Huang, C.; Wang, X. Mask Scoring R-CNN. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 6402–6411. [Google Scholar]
- Liu, P.; Zhao, C.; Li, X.; He, M.; Pichel, W. Identification of ocean oil spills in SAR imagery based on fuzzy logic algorithm. Int. J. Remote Sens. 2010, 31, 4819–4833. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | 6 July 2020 | |
| Image ID | S1A_IW_GRDH_1SDV_20200706T171436_20200706T171501_033337_03DCC6_1122 | |
| Image ID | S1A_IW_GRDH_1SDV_20200706T171411_20200706T171436_033337_03DCC6_3302 | |
| Wind@Genoa | Speed: 2 m/s | Direction: 204°N |
| Wind@LaSpezia | Speed: 5 m/s | Direction: 134°N |
| Date | 18 July 2020 | |
| Image ID | S1A_IW_GRDH_1SDV_20200718T171436_20200718T171501_033512_03E220_DEFC | |
| Image ID | S1A_IW_GRDH_1SDV_20200718T171411_20200718T171436_033512_03E220_1765 | |
| Wind@Genoa | Speed: 2.2 m/s | Direction: 259°N |
| Wind@LaSpezia | Speed: 2.9 m/s | Direction: 149°N |
| Date | 23 August 2020 | |
| Image ID | S1A_IW_GRDH_1SDV_20200823T171414_20200823T171439_034037_03F36B_5DA2 | |
| Image ID | S1A_IW_GRDH_1SDV_20200823T171439_20200823T171504_034037_03F36B_447E | |
| Wind@Genoa | Speed: 2 m/s | Direction: 188°N |
| Wind@LaSpezia | Speed: 2.5 m/s | Direction: 150°N |
| Date | 29 August 2020 | |
| Image ID | S1B_IW_GRDH_1SDV_20200829T171409_20200829T171434_023141_02BF02_2FD4 | |
| Image ID | S1B_IW_GRDH_1SDV_20200829T171344_20200829T171409_023141_02BF02_36A0 | |
| Wind@Genoa | Speed: 1.1 m/s | Direction: 194°N |
| Wind@LaSpezia | Speed: 9.4 m/s | Direction: 210°N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graziano, M.D.; Renga, A. Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images. Remote Sens. 2021, 13, 1955. https://doi.org/10.3390/rs13101955
Graziano MD, Renga A. Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images. Remote Sensing. 2021; 13(10):1955. https://doi.org/10.3390/rs13101955
Chicago/Turabian StyleGraziano, Maria Daniela, and Alfredo Renga. 2021. "Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images" Remote Sensing 13, no. 10: 1955. https://doi.org/10.3390/rs13101955
APA StyleGraziano, M. D., & Renga, A. (2021). Towards Automatic Recognition of Wakes Generated by Dark Vessels in Sentinel-1 Images. Remote Sensing, 13(10), 1955. https://doi.org/10.3390/rs13101955