A Fast Retrieval of Cloud Parameters Using a Triplet of Wavelengths of Oxygen Dimer Band around 477 nm

 , , and
, , and 
Abstract
1. Introduction
2. Instrument and Data
3. Methodology
3.1. Retrieval Algorithm
3.2. Description of Look-Up Table (LUT)
4. Results
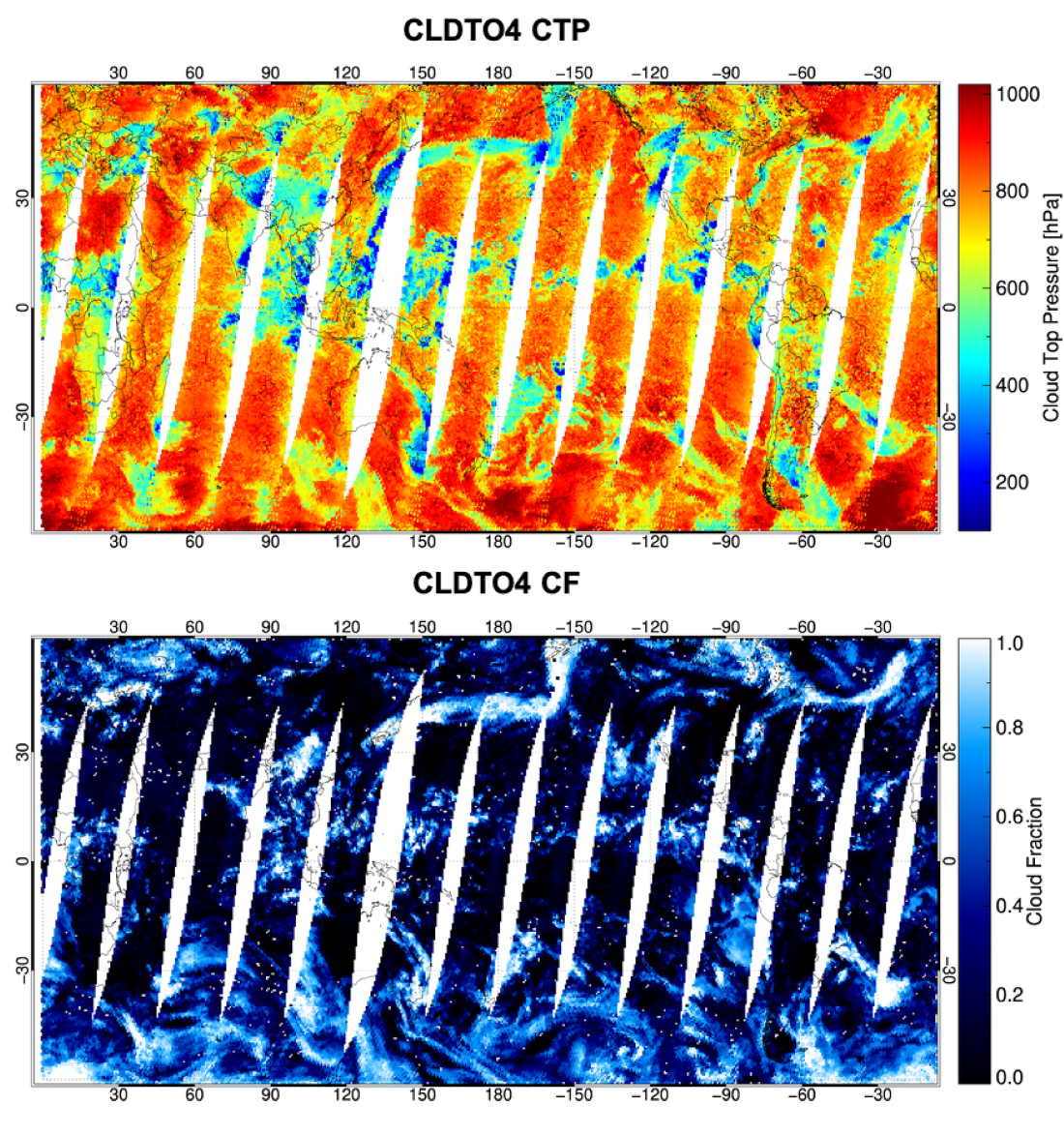
4.1. CLDTO4 Retrievals from GOME-2 Observation
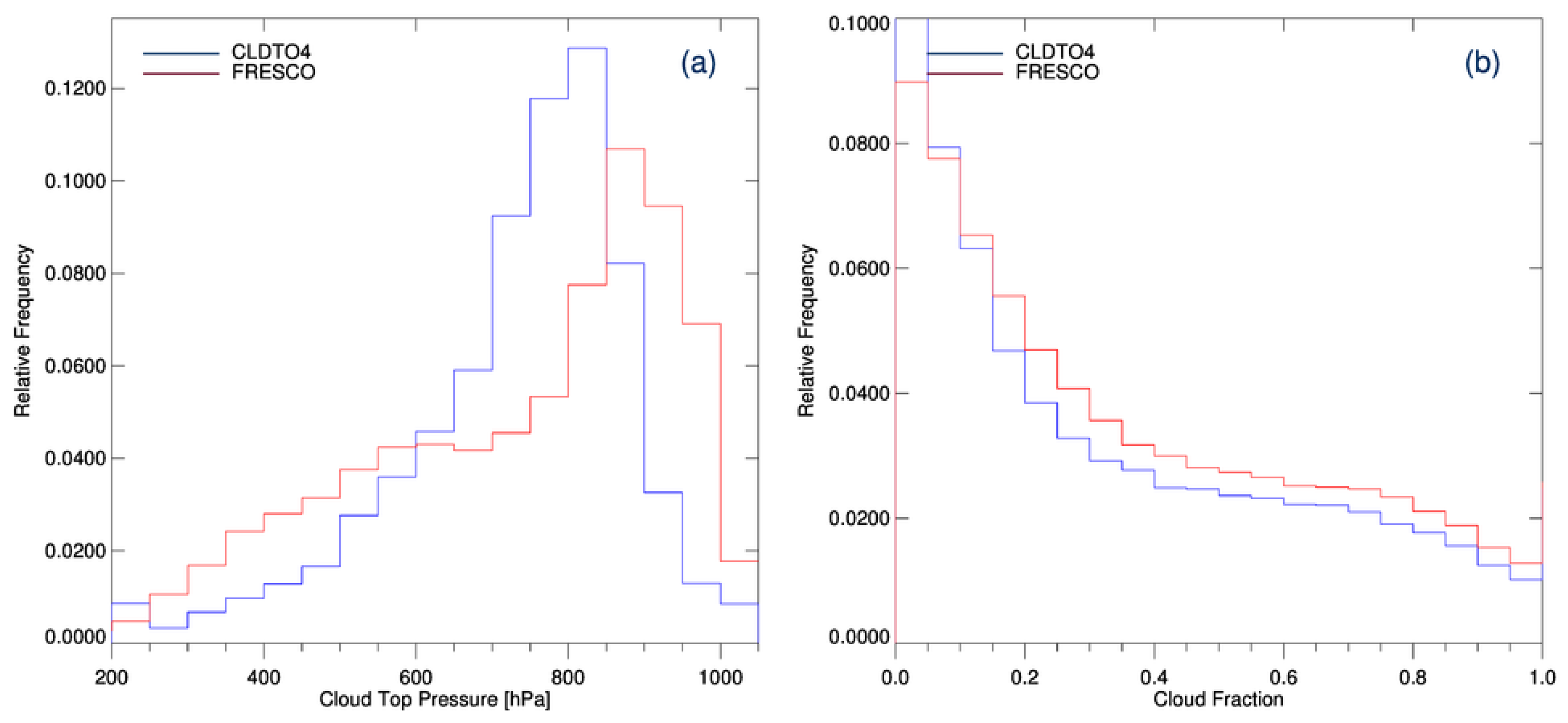
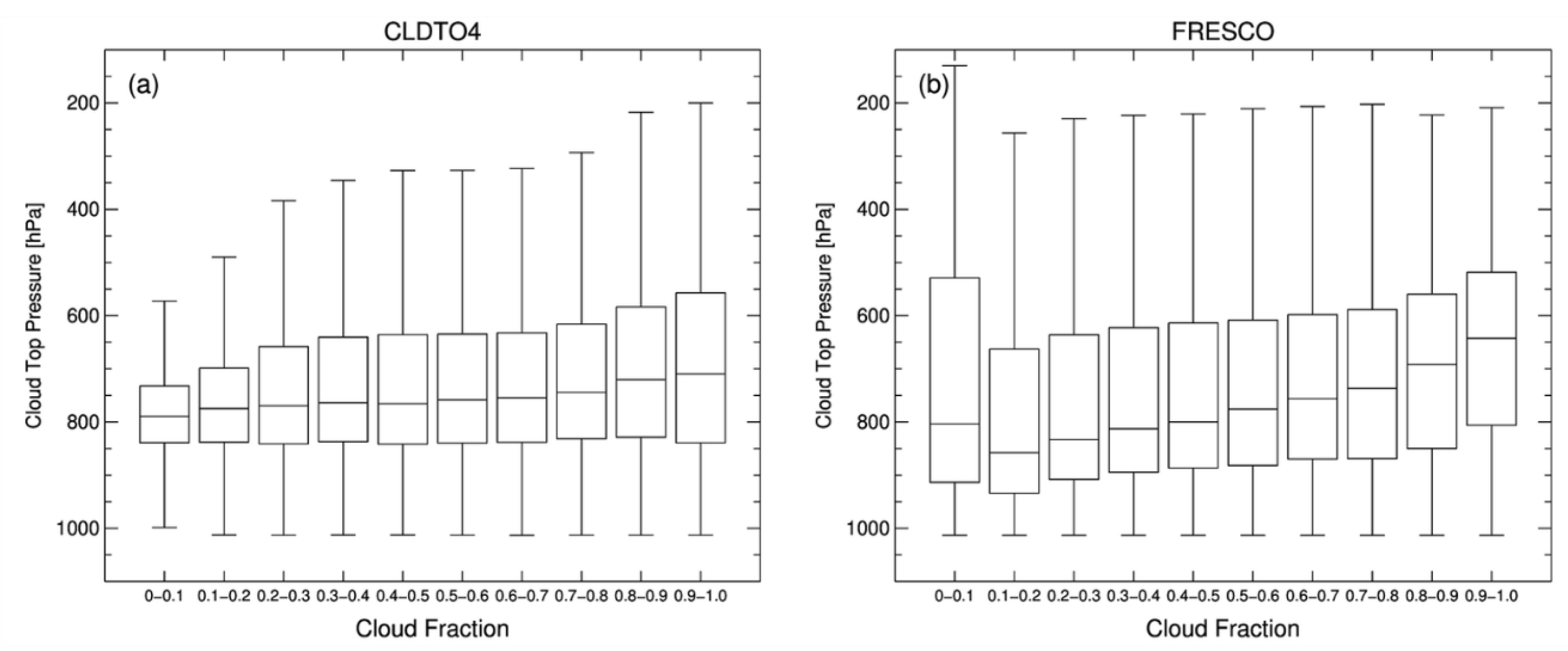
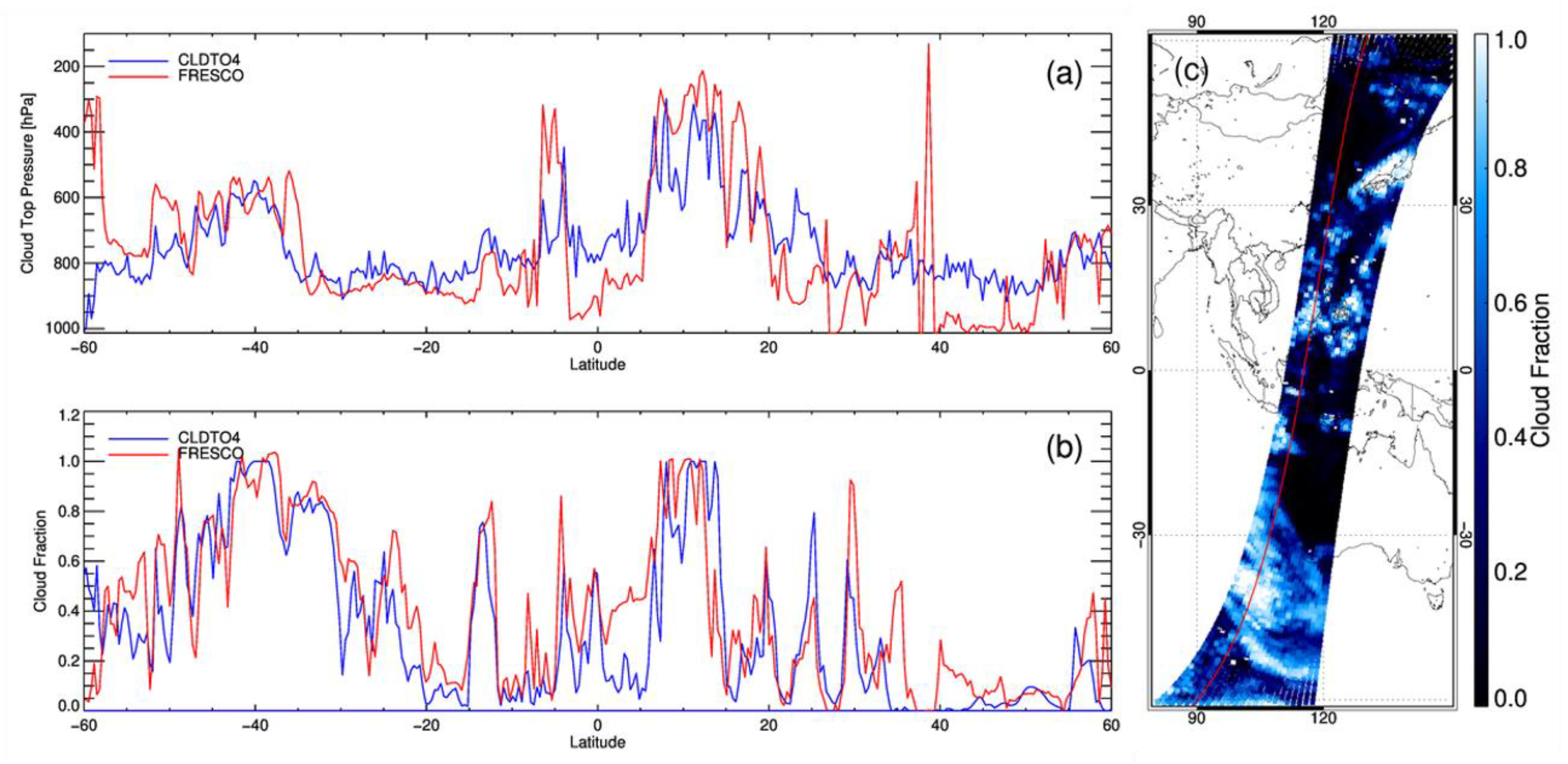
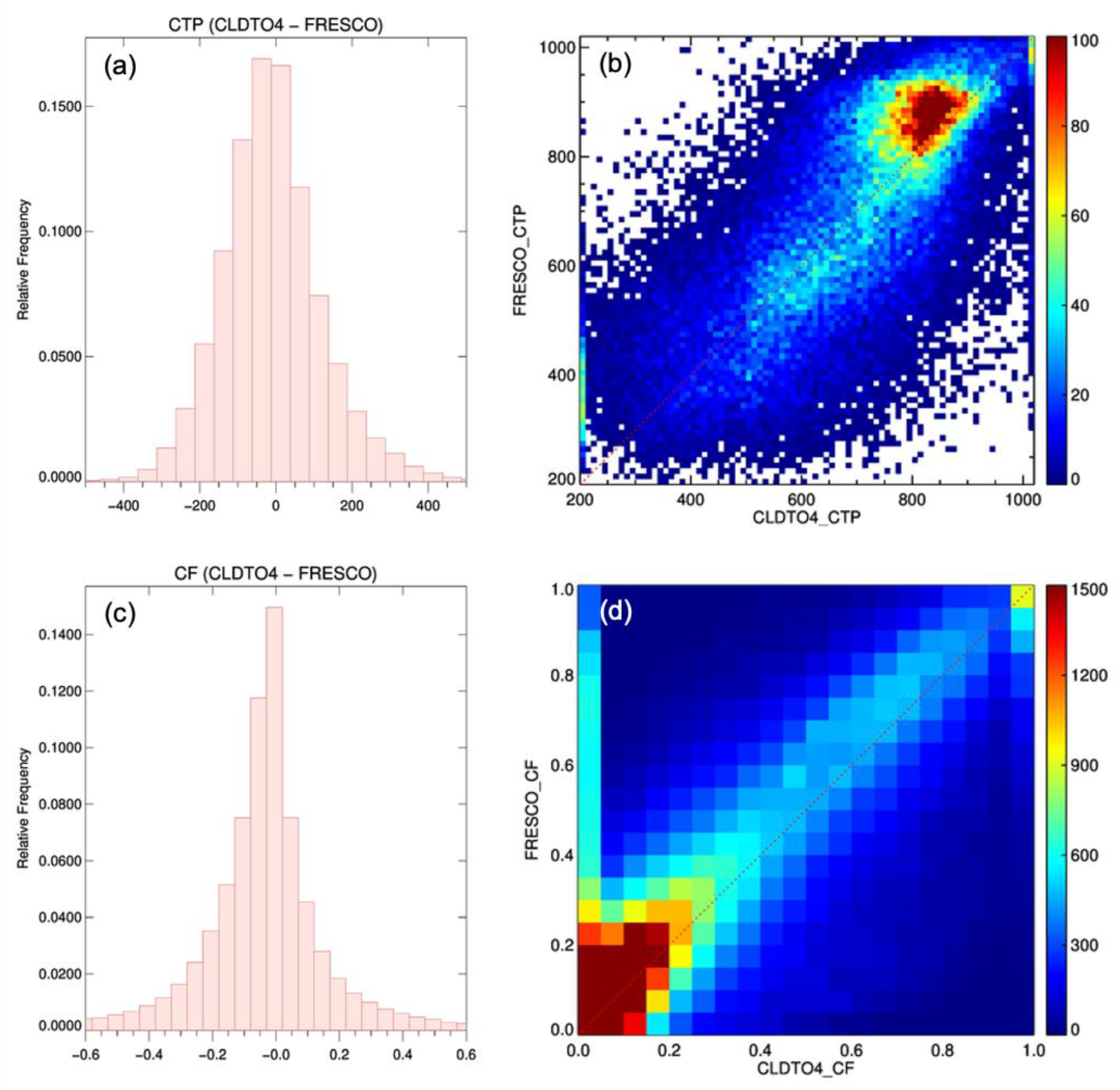
4.2. Inter-Comparison of Cloud Parameters with Fast Retrieval Scheme for Clouds from the Oxygen A Band (FRESCO)
5. Discussion
6. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AFGL | Air Force Geophysics Laboratory |
| ATSR | Along-Track Scanning Radiometer |
| ARM | Atmospheric Radiation Measurement |
| CF | Cloud Fraction |
| CLDTO4 | fast CLouD algorithm using the Triplet of wavelengths around Oxygen-dimer |
| CTP | Cloud Top Pressure |
| DU | Dobson Unit |
| DOAS | Differential Optical Absorption Spectroscopy |
| ETOPO | Earth TOPOgraphy |
| FRESCO | Fast Retrieval Scheme for Clouds from the Oxygen A band |
| FWHM | Full Width at Half Maximum |
| GEMS | Geostationary Environment Monitoring Spectrometer |
| GEO | Geostationary Earth Orbit |
| GLER | Geometry-dependent Lambertian Equivalent Reflectivity |
| GOME-2 | Global Ozone Monitoring Experiment-2 |
| IPA | Independent Pixel Approximation |
| LEO | Low Earth Orbit |
| LT | Local Time |
| LUT | Look Up Table |
| MAE | Mean Absolute Error |
| MLER | Mixed Lambertian Equivalent Reflectivity |
| MLS | Microwave Limb Sounder |
| MSC | Main Science Channels |
| NRS | Normalized Radiance Signal |
| NRT | Near Real Time |
| O2-O2 | Oxygen Dimer |
| PMD | Polarization Measurement Device |
| RAA | Relative Azimuth Angle |
| RMSE | Root Mean Square Error |
| SZA | Solar Zenith Angle |
| VLIDORT | Vectorized Linearized Discrete Ordinate Radiative Transfer model |
| VZA | Viewing Zenith Angle |
References
- Choi, H.; Lee, K.-M.; Seo, J.; Bae, J. The Influence of Atmospheric Composition on Polarization in the GEMS Spectral Region. Asia Pac. J. Atmos. Sci. 2020. [Google Scholar] [CrossRef]
- Emde, C.; Buras-Schnell, R.; Sterzik, M.; Bagnulo, S. Influence of aerosols, clouds, and sunglint on polarization spectra of Earthshine. Astron. Astrophys. 2017, 605, A2. [Google Scholar] [CrossRef]
- Schutgens, N.A.J.; Tilstra, L.G.; Stammes, P.; Bréon, F.M. On the relationship between Stokes parameters Q and U of atmospheric ultraviolet/visible/near-infrared radiation. J. Geophys. Res. D Atmos. 2004. [Google Scholar] [CrossRef]
- Krijger, J.M.; Van Weele, M.; Aben, I.; Frey, R. Technical Note: The effect of sensor resolution on the number of cloud-free observations from space. Atmos. Chem. Phys. 2007. [Google Scholar] [CrossRef]
- Bhartia, P.K.; Wellemeyer, C.W. TOMS-V8 Total O3 Algorithm in OMI Algorithm Theoretical Basis Document; Bhartia, P.K., Ed.; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2002; Volume II, pp. 15–32. Available online: https://eospso.gsfc.nasa.gov/sites/default/files/atbd/ATBD-OMI-02.pdf (accessed on 5 November 2020).
- Liu, X.; Bhartia, P.K.; Chance, K.; Spurr, R.J.D.; Kurosu, T.P. Ozone profile retrievals from the ozone monitoring instrument. Atmos. Chem. Phys. 2010, 10, 2521–2537. [Google Scholar] [CrossRef]
- Levelt, P.F.; van den Oord, G.H.J.; Dobber, M.R.; Malkki, A.; Huib, V.; Johan de, V.; Stammes, P.; Lundell, J.O.V.; Saari, H. The ozone monitoring instrument. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1093–1101. [Google Scholar] [CrossRef]
- Burrows, J.P.; Weber, M.; Buchwitz, M.; Rozanov, V.; Ladstätter-Weißenmayer, A.; Richter, A.; Debeek, R.; Hoogen, R.; Bramstedt, K.; Eichmann, K.U.; et al. The Global Ozone Monitoring Experiment (GOME): Mission concept and first scientific results. J. Atmos. Sci. 1999, 56, 151–175. [Google Scholar] [CrossRef]
- Callies, J.; Corpaccioli, E.; Eisinger, M.; Hahne, A.; Lefebvre, A. GOME-2-Metop’s second-generation sensor for operational ozone monitoring. ESA Bull. 2000, 102, 28–36. [Google Scholar]
- Munro, R.; Lang, R.; Klaes, D.; Poli, G.; Retscher, C.; Lindstrot, R.; Huckle, R.; Lacan, A.; Grzegorski, M.; Holdak, A.; et al. The GOME-2 instrument on the Metop series of satellites: Instrument design, calibration, and level 1 data processing—An overview. Atmos. Meas. Tech. 2016, 9, 1279–1301. [Google Scholar] [CrossRef]
- Bovensmann, H.; Burrows, J.P.; Buchwitz, M.; Frerick, J.; Noël, S.; Rozanov, V.V.; Chance, K.V.; Goede, A.P.H. SCIAMACHY: Mission objectives and measurement modes. J. Atmos. Sci. 1999, 56, 127–150. [Google Scholar] [CrossRef]
- Zoogman, P.; Liu, X.; Suleiman, R.M.; Pennington, W.F.; Flittner, D.E.; Al-Saadi, J.A.; Hilton, B.B.; Nicks, D.K.; Newchurch, M.J.; Carr, J.L.; et al. Tropospheric emissions: Monitoring of pollution (TEMPO). J. Quant. Spectrosc. Radiat. Transf. 2017, 186, 17–39. [Google Scholar] [CrossRef] [PubMed]
- Ingmann, P.; Veihelmann, B.; Langen, J.; Lamarre, D.; Stark, H.; Courrèges-Lacoste, G.B. Requirements for the GMES Atmosphere Service and ESA’s implementation concept: Sentinels-4/-5 and -5p. Remote Sens. Environ. 2012, 120, 58–69. [Google Scholar] [CrossRef]
- Kim, J.; Jeong, U.; Ahn, M.-H.; Kim, J.H.; Park, R.J.; Lee, H.; Song, C.H.; Choi, Y.-S.; Lee, K.-H.; Yoo, J.-M.; et al. New era of air quality monitoring from space: Geostationary environment monitoring spectrometer (GEMS). Bull. Am. Meteorol. Soc. 2020, 101, E1–E22. [Google Scholar] [CrossRef]
- Choi, W.J.; Moon, K.-J.; Yoon, J.; Cho, A.; Kim, S.-K.; Lee, S.; Ko, D.H.; Kim, J.; Ahn, M.H.; Kim, D.-R.; et al. Introducing the geostationary environment monitoring spectrometer. J. Appl. Remote Sens. 2018, 12, 044005. [Google Scholar] [CrossRef]
- CEOS. Geostationary Satellite Constellation for Observing Global Air Quality: Geophysical Validation Needs. 2017. Available online: http://ceos.org/observations/documents/GEO_AQ_Constellation_Geophysical_Validation_Needs_1.1_2Oct2019.pdf (accessed on 5 November 2020).
- Koelemeijer, R.B.A.; Stammes, P.; Hovenier, J.W.; De Haan, J.F. A fast method for retrieval of cloud parameters using oxygen A band measurements from the Global Ozone Monitoring Experiment. J. Geophys. Res. Atmos. 2001, 106, 3475–3490. [Google Scholar] [CrossRef]
- Wang, P.; Stammes, P.; Van Der, A.R.; Pinardi, G.; Van Roozendael, M. FRESCO+: An improved O2 A-band cloud retrieval algorithm for tropospheric trace gas retrievals. Atmos. Chem. Phys. 2008, 8, 6565–6576. [Google Scholar] [CrossRef]
- Desmons, M.; Wang, P.; Stammes, P.; Gijsbert Tilstra, L. FRESCO-B: A fast cloud retrieval algorithm using oxygen B-band measurements from GOME-2. Atmos. Meas. Tech. 2019, 12, 2485–2498. [Google Scholar] [CrossRef]
- Joiner, J.; Vasilkov, A.P. First results from the OMI rotational Raman scattering cloud pressure algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1272–1282. [Google Scholar] [CrossRef]
- Acarreta, J.R.; De Haan, J.F.; Stammes, P. Cloud pressure retrieval using the O2-O2 absorption band at 477 nm. J. Geophys. Res. D Atmos. 2004. [Google Scholar] [CrossRef]
- Vasilkov, A.; Yang, E.S.; Marchenko, S.; Qin, W.; Lamsal, L.; Joiner, J.; Krotkov, N.; Haffner, D.; Bhartia, P.K.; Spurr, R. A cloud algorithm based on the O2-O2 477 nm absorption band featuring an advanced spectral fitting method and the use of surface geometry-dependent Lambertian-equivalent reflectivity. Atmos. Meas. Tech. 2018, 11, 4093–4107. [Google Scholar] [CrossRef]
- Veefkind, J.P.; De Haan, J.F.; Sneep, M.; Levelt, P.F. Improvements to the OMI O2-O2 operational cloud algorithm and comparisons with ground-based radar-lidar observations. Atmos. Meas. Tech. 2016, 9, 6035–6049. [Google Scholar] [CrossRef]
- Salow, H.; Steiner, W. Die durch Wechselwirkungskräfte bedingten Absorptionsspektra des Sauerstoffes. Z. Phys. 1936, 99, 137–158. [Google Scholar] [CrossRef]
- Janssen, J. Analyse Spectrale des Éléments de l’atmosphère Terrestre; Gauthier-Villars: Paris, France, 1885. [Google Scholar]
- Thalman, R.; Volkamer, R. Temperature dependent absorption cross-sections of O2-O2 collision pairs between 340 and 630 nm and at atmospherically relevant pressure. Phys. Chem. Chem. Phys. 2013, 15, 15371–15381. [Google Scholar] [CrossRef] [PubMed]
- Zuidema, P.; Evans, K.F. On the validity of the independent pixel approximation for boundary layer clouds observed during ASTEX. J. Geophys. Res. Atmos. 1998, 103, 6059–6074. [Google Scholar] [CrossRef]
- Spurr, R.J.D. VLIDORT: A linearized pseudo-spherical vector discrete ordinate radiative transfer code for forward model and retrieval studies in multilayer multiple scattering media. J. Quant. Spectrosc. Radiat. Transf. 2006, 102, 316–342. [Google Scholar] [CrossRef]
- Spurr, R. LIDORT and VLIDORT: Linearized pseudo-spherical scalar and vector discrete ordinate radiative transfer models for use in remote sensing retrieval problems. In Light Scattering Reviews 3; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Mishchenko, M.I.; Lacis, A.A.; Travis, L.D. Errors induced by the neglect of polarization in radiance calculations for Rayleigh-scattering atmospheres. J. Quant. Spectrosc. Radiat. Transf. 1994, 51, 491–510. [Google Scholar] [CrossRef]
- Lacis, A.A.; Chowdhary, J.; Mishchenko, M.I.; Cairns, B. Modeling errors in diffuse-sky radiation: Vector vs. scalar treatment. Geophys. Res. Lett. 1998, 25, 135–138. [Google Scholar] [CrossRef]
- Anderson, G.P.; Clough, S.A.; Kneizys, F.X.; Chetwynd, J.H.; Shettle, E.P. AFGL Atmospheric Constituent Profiles (0–120 km); Air Force Geophysics Laboratory: Hanscom AFB, Bedford, MA, USA, 1986. [Google Scholar]
- Vasilkov, A.; Lyapustin, A.; Mitchell, B.G.; Huang, D. UV reflectance of the ocean from DSCOVR/EPIC: Comparisons with a theoretical model and Aura/OMI observations. J. Atmos. Ocean. Technol. 2019, 36, 2087–2099. [Google Scholar] [CrossRef]
- Zoogman, P.; Liu, X.; Chance, K.; Sun, Q.; Schaaf, C.; Mahr, T.; Wagner, T. A climatology of visible surface reflectance spectra. J. Quant. Spectrosc. Radiat. Transf. 2016, 180, 39–46. [Google Scholar] [CrossRef]
- Tilstra, L.G.; Tuinder, O.N.E.; Wang, P.; Stammes, P. Surface reflectivity climatologies from UV to NIR determined from Earth observations by GOME-2 and SCIAMACHY. J. Geophys. Res. 2017, 122, 4084–4111. [Google Scholar] [CrossRef]
- NOAA National Geophysical Data Center. 2-Minute Gridded Global Relief Data (ETOPO2) v2; NOAA: Washington, DC, USA, 2006. [Google Scholar]
- McPeters, R.D.; Labow, G.J. Climatology 2011: An MLS and sonde derived ozone climatology for satellite retrieval algorithms. J. Geophys. Res. Atmos. 2012. [Google Scholar] [CrossRef]
- Koelemeijer, R.B.A.; de Haan, J.F.; Stammes, P. A database of spectral surface reflectivity in the range 335–772 nm derived from 5.5 years of GOME observations. J. Geophys. Res. Atmos. 2003. [Google Scholar] [CrossRef]
- Fournier, N.; Koelemeijer, R.B.A.; Eisinger, M.; De Haan, J.F.; Stammes, P. Refinement of a database of spectral surface reflectivity in the range 335-772 nm derived from 5.5 years of GOME observations. In Proceedings of the Envisat & ERS Symposium (ESA SP-572), Salzburg, Austria, 6–10 September 2004. [Google Scholar]
- Kleipool, Q.L.; Dobber, M.R.; de Haan, J.F.; Levelt, P.F. Earth surface reflectance climatology from 3 years of OMI data. J. Geophys. Res. Atmos. 2008. [Google Scholar] [CrossRef]
- Park, S.S.; Takemura, T.; Kim, J. Effect of temperature-dependent cross sections on O4 slant column density estimation by a space-borne UV–visible hyperspectral sensor. Atmos. Environ. 2017, 152, 98–110. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | GOME-2/MetOp-B | |
|---|---|---|
| Main Science Channel (MSC) | Polarization Measurement Device (PMDs) | |
| Spectral Range | 239–791 nm | 312–790 nm |
| Spectral Sampling | 0.12–0.21 nm | 0.62–8.8 nm |
| Spectral Resolution | FWHM 0.29–0.55 nm | FWHM 2.9–37 nm |
| Spatial Resolution | 80 × 40 km | 10 × 40 km |
| Swath Width | 1920 km | |
| Parameter (Unit) | Nodes |
|---|---|
| Wavelength (nm) | 469, 477, 485 |
| SZA (°) | 0.1, 15, 30, 45, 60, 75, 85.9 |
| VZA (°) | 0.1, 15, 30, 45, 60, 75, 85.9 |
| RAA (°) | 0.1, 30, 60, 90, 120, 150, 179.9 |
| Surface albedo | 0.01, 0.05, 0.1, 0.5, 0.99 |
| Surface pressure (hPa) | 1013, 900, 800, 700, 500, 300, 200 |
| Ozone profiles (DU) | L225, L275, L325, L375, L425, L475, M175, M225, M275, M325, M375, M425, M475, M525, M575 |
| Parameter | (a) All Sky | (b) CF > 0.5 | ||
|---|---|---|---|---|
| CTP (hPa) | CF | CTP (hPa) | CF | |
| Correlation Coefficient | 0.74 | 0.67 | 0.79 | 0.61 |
| Bias | −3.56 | 0.11 | −2.32 | 0.004 |
| RMSE | 77.58 | 0.11 | 48.61 | 0.06 |
| MAE | 34.75 | 0.05 | 15.56 | 0.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, H.; Liu, X.; Gonzalez Abad, G.; Seo, J.; Lee, K.-M.; Kim, J. A Fast Retrieval of Cloud Parameters Using a Triplet of Wavelengths of Oxygen Dimer Band around 477 nm. Remote Sens. 2021, 13, 152. https://doi.org/10.3390/rs13010152
Choi H, Liu X, Gonzalez Abad G, Seo J, Lee K-M, Kim J. A Fast Retrieval of Cloud Parameters Using a Triplet of Wavelengths of Oxygen Dimer Band around 477 nm. Remote Sensing. 2021; 13(1):152. https://doi.org/10.3390/rs13010152
Chicago/Turabian StyleChoi, Haklim, Xiong Liu, Gonzalo Gonzalez Abad, Jongjin Seo, Kwang-Mog Lee, and Jhoon Kim. 2021. "A Fast Retrieval of Cloud Parameters Using a Triplet of Wavelengths of Oxygen Dimer Band around 477 nm" Remote Sensing 13, no. 1: 152. https://doi.org/10.3390/rs13010152
APA StyleChoi, H., Liu, X., Gonzalez Abad, G., Seo, J., Lee, K.-M., & Kim, J. (2021). A Fast Retrieval of Cloud Parameters Using a Triplet of Wavelengths of Oxygen Dimer Band around 477 nm. Remote Sensing, 13(1), 152. https://doi.org/10.3390/rs13010152