An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters


Abstract
{kind=link}
{kind=link}
{kind=link}
1. Introduction
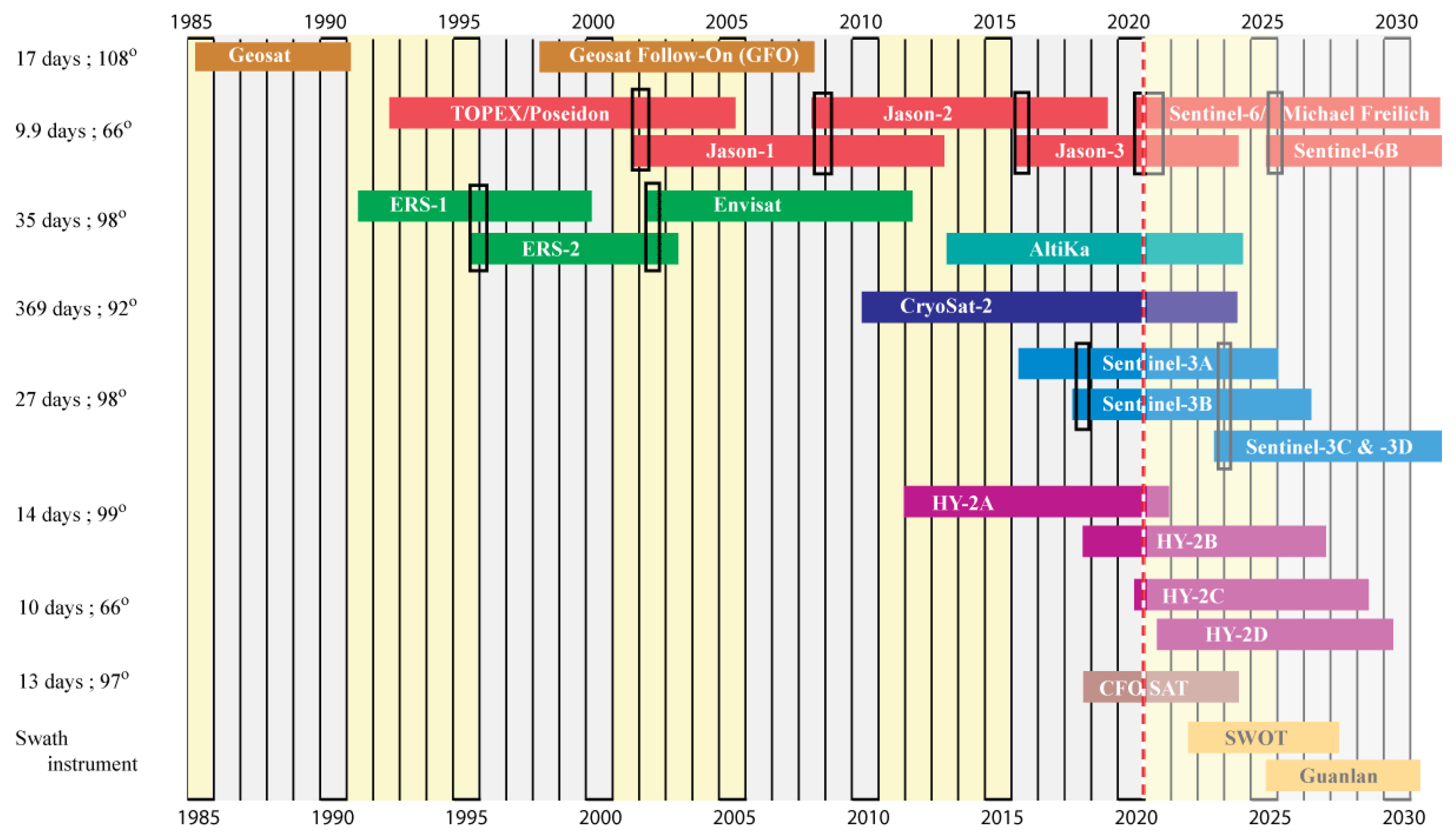
1.1. Long-Term View of Altimetry
1.2. Requirements and Measurements for Marine Cal/Val
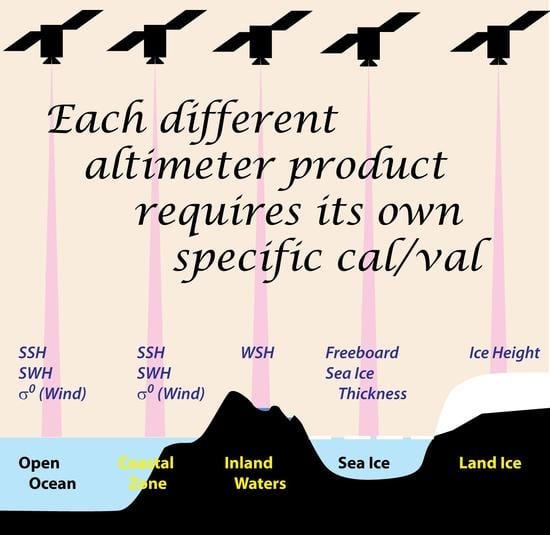
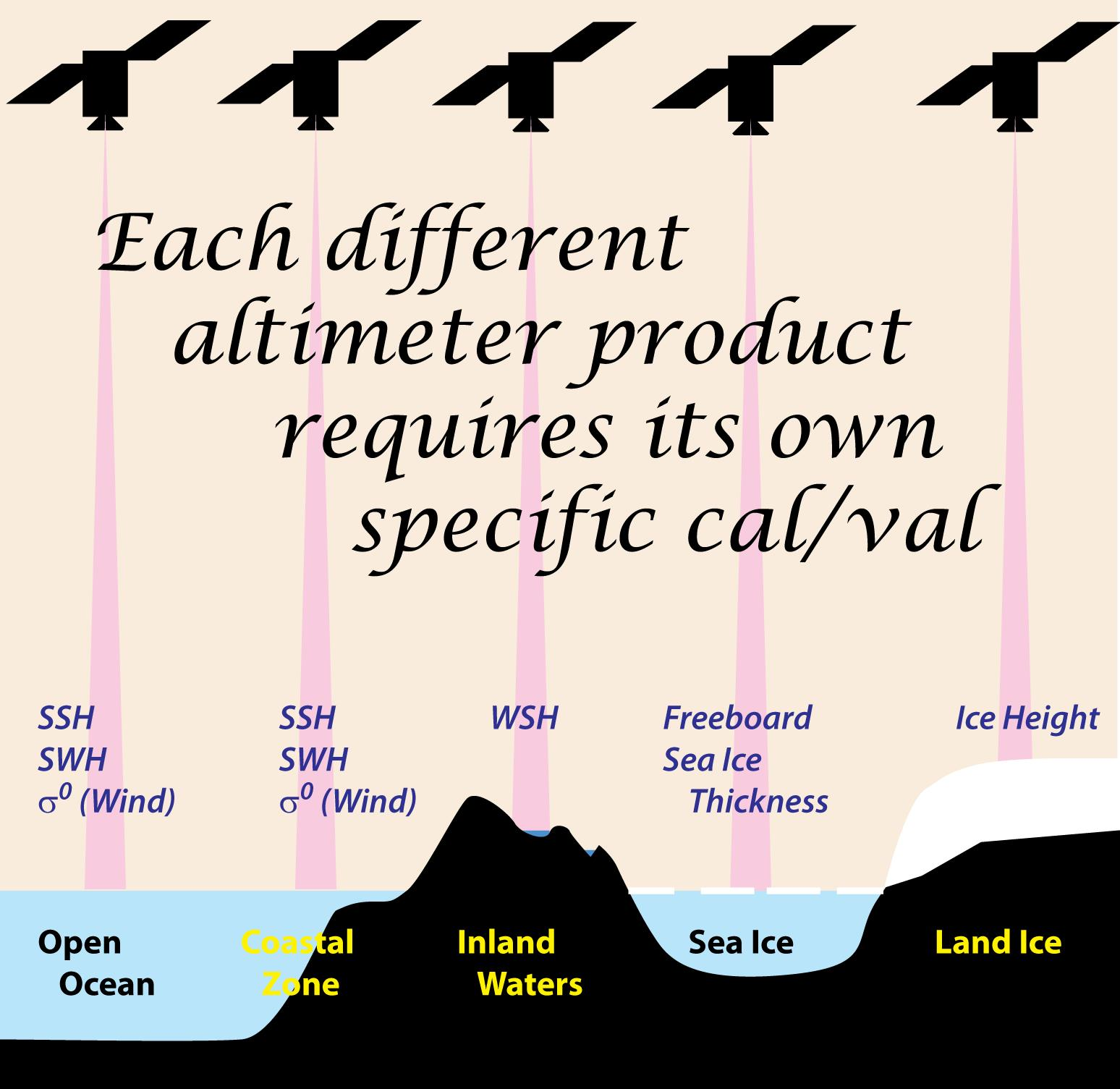
1.3. Altimetry over Non-Marine Surfaces
1.4. Changes in Altimeter Technology
2. Cal/Val Procedures
2.1. Facilities, Calibration Sites and Validation Co-Ordination
2.2. Vicarious Calibration
3. Cal/Val of Specific Altimeter Products
3.1. Assessment of Wind Speed and Wave Height
3.2. Hydrology Cal/Val
3.3. Assessment over Ice Surfaces
3.4. Microwave Radiometers
4. Challenges for Swath Altimetry
5. Summary
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fu, L.L.; Cazenave, A. Satellite Altimetry and Earth Sciences; Academic Press: San Diego, CA, USA, 2001. [Google Scholar]
- Brown, G. The average impulse response of a rough surface and its applications. IEEE Trans. Antennas Propag. 1977, 25, 67–74. [Google Scholar] [CrossRef]
- Hayne, G. Radar altimeter mean return waveforms from near-normal-incidence ocean surface scattering. IEEE Trans. Antennas Propag. 1980, 28, 687–692. [Google Scholar] [CrossRef]
- Vonbun, F.; Marsh, J.G.; McGoogan, J.; Leitao, C.; Vincent, S.; Wells, W. Skylab Earth resources experiment package /EREP/—Sea surface topography experiment. J. Spacecr. Rocket. 1976, 13, 248–250. [Google Scholar] [CrossRef]
- Tapley, B.D.; Born, G.H.; Hagar, H.H.; Lorell, J.; Parke, M.E.; Diamante, J.M.; Douglas, B.C.; Goad, C.C.; Kolemkiewicz, R.; Marsh, J.G.; et al. Seasat altimeter calibration: Initial results. Science 1979, 204, 1410–1412. [Google Scholar] [CrossRef] [PubMed]
- Justice, C.; Belward, A.; Morisette, J.; Lewis, P.; Privette, J.; Baret, F. Developments in the ‘validation’ of satellite sensor products for the study of the land surface. Int. J. Remote Sens. 2000, 21, 3383–3390. [Google Scholar] [CrossRef]
- Sterckx, S.; Brown, I.; Kääb, A.; Krol, M.; Morrow, R.; Veefkind, P.; Boersma, K.F.; Mazière, M.D.; Fox, N.; Thorne, P. Towards a European Cal/Val service for Earth observation. Int. J. Remote Sens. 2020, 41, 4496–4511. [Google Scholar] [CrossRef]
- GCOS. Systematic Observation Requirements for Satellite-Based Data Products for Climate. 2011 Update; GCOS-154, Technical Report; GCOS: Geneva, Switzerland, 2011; Available online: https://library.wmo.int/doc_num.php?explnum_id=3710 (accessed on 23 December 2020).
- Young, I.R.; Ribal, A. Multiplatform evaluation of global trends in wind speed and wave height. Science 2019, 364, 548–552. [Google Scholar] [CrossRef]
- Quartly, G.D.; Legeais, J.F.; Ablain, M.; Zawadzki, L.; Fernandes, M.J.; Rudenko, S.; Carrère, L.; García, P.N.; Cipollini, P.; Andersen, O.B.; et al. A new phase in the production of quality-controlled sea level data. Earth Syst. Sci. Data 2017, 9, 557–572. [Google Scholar] [CrossRef]
- Legeais, J.F.; Ablain, M.; Zawadzki, L.; Zuo, H.; Johannessen, J.A.; Scharffenberg, M.G.; Fenoglio-Marc, L.; Fernandes, M.J.; Andersen, O.B.; Rudenko, S.; et al. An improved and homogeneous altimeter sea level record from the ESA Climate Change Initiative. Earth Syst. Sci. Data 2018, 10, 281–301. [Google Scholar] [CrossRef]
- Dodet, G.; Piolle, J.F.; Quilfen, Y.; Abdalla, S.; Accensi, M.; Ardhuin, F.; Ash, E.; Bidlot, J.R.; Gommenginger, C.; Marechal, G.; et al. The sea state CCI dataset v1: Towards a sea state climate data record based on satellite observations. Earth Syst. Sci. Data 2020, 12, 1929–1951. [Google Scholar] [CrossRef]
- Shepherd, A.; Gilbert, L.; Muir, A.S.; Konrad, H.; McMillan, M.; Slater, T.; Briggs, K.H.; Sundal, A.V.; Hogg, A.E.; Engdahl, M.E. Trends in Antarctic ice sheet elevation and mass. Geophys. Res. Lett. 2019, 46, 8174–8183. [Google Scholar] [CrossRef]
- Quartly, G.D.; Rinne, E.; Passaro, M.; Andersen, O.B.; Dinardo, S.; Fleury, S.; Guillot, A.; Hendricks, S.; Kurekin, A.A.; Müller, F.L.; et al. Retrieving sea level and freeboard in the Arctic: A review of current radar altimetry methodologies and future perspectives. Remote Sens. 2019, 11, 881. [Google Scholar] [CrossRef]
- Quartly, G. Achieving accurate altimetry across storms: Improved wind and wave estimates from C Band. J. Atmos. Ocean. Technol. 1997, 14, 705–715. [Google Scholar] [CrossRef]
- Tournadre, J.; Lambin-Artru, J.; Steunou, N. Cloud and rain effects on AltiKa/SARAL Ka-band radar altimeter—Part I: Modeling and mean annual data availability. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1806–1817. [Google Scholar] [CrossRef]
- Lillibridge, J.; Scharroo, R.; Abdalla, S.; Vandemark, D. One- and two-dimensional wind speed models for Ka-band altimetry. J. Atmos. Ocean. Technol. 2014, 31, 630–638. [Google Scholar] [CrossRef]
- Quartly, G.D. Metocean comparisons of Jason-2 and AltiKa—A method to develop a new wind speed algorithm. Mar. Geod. 2015, 38, 437–448. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Ray, C.; Martin-Puig, C.; Clarizia, M.P.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR altimeter backscattered waveform model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Moreau, T.; Tran, N.; Aublanc, J.; Tison, C.; Le Gac, S.; Boy, F. Impact of long ocean waves on wave height retrieval from SAR altimetry data. Adv. Space Res. 2018, 62, 1434–1444. [Google Scholar] [CrossRef]
- Reale, F.; Dentale, F.; Carratelli, E.P.; Fenoglio-Marc, L. Influence of sea state on sea surface height oscillation from Doppler altimeter measurements in the North Sea. Remote Sens. 2018, 10, 1100. [Google Scholar] [CrossRef]
- Durand, M.; Fu, L.; Lettenmaier, D.P.; Alsdorf, D.E.; Rodriguez, E.; Esteban-Fernandez, D. The Surface Water and Ocean Topography mission: Observing terrestrial surface water and oceanic submesoscale eddies. Proc. IEEE 2010, 98, 766–779. [Google Scholar] [CrossRef]
- Chen, G.; Tang, J.; Zhao, C.; Wu, S.; Yu, F.; Ma, C.; Xu, Y.; Chen, W.; Zhang, Y.; Liu, J.; et al. Concept design of the “Guanlan” science mission: China’s novel contribution to space oceanography. Front. Mar. Sci. 2019, 6, 194. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Ménard, Y.; Jeansou, E.; Vincent, P. Calibration of the TOPEX/POSEIDON altimeters at Lampedusa: Additional results at Harvest. J. Geophys. Res. Ocean. 1994, 99, 24487–24504. [Google Scholar] [CrossRef]
- Bonnefond, P.; Exertier, P.; Laurain, O.; Guinle, T.; Féménias, P. Corsica: A 20-Yr multi-mission absolute altimeter calibration site. Adv. Space Res. 2019. [Google Scholar] [CrossRef]
- Zhou, B.; Watson, C.; Legresy, B.; King, M.A.; Beardsley, J.; Deane, A. GNSS/INS-equipped buoys for altimetry validation: Lessons learnt and new directions from the Bass Strait Validation Facility. Remote Sens. 2020, 12, 3001. [Google Scholar] [CrossRef]
- Mertikas, S.; Tripolitsiotis, A.; Donlon, C.; Mavrocordatos, C.; Féménias, P.; Borde, F.; Frantzis, X.; Kokolakis, C.; Guinle, T.; Vergos, G.; et al. The ESA Permanent Facility for altimetry calibration: Monitoring performance of radar altimeters for Sentinel-3A, Sentinel-3B and Jason-3 using transponder and sea-surface calibrations with FRM standards. Remote Sens. 2020, 12, 2642. [Google Scholar] [CrossRef]
- Quartly, G.D.; Nencioli, F.; Raynal, M.; Bonnefond, P.; Nilo Garcia, P.; Garcia-Mondéjar, A.; Flores de la Cruz, A.; Crétaux, J.F.; Taburet, N.; Frery, M.L.; et al. The roles of the S3MPC: Monitoring, validation and evolution of Sentinel-3 altimetry observations. Remote Sens. 2020, 12, 1763. [Google Scholar] [CrossRef]
- Yang, L.; Xu, Y.; Zhou, X.; Zhu, L.; Jiang, Q.; Sun, H.; Chen, G.; Wang, P.; Mertikas, S.P.; Fu, Y.; et al. Calibration of an airborne interferometric radar altimeter over the Qingdao coast sea, China. Remote Sens. 2020, 12, 1651. [Google Scholar] [CrossRef]
- Wang, J.; Fu, L.L.; Qiu, B.; Menemenlis, D.; Farrar, J.T.; Chao, Y.; Thompson, A.F.; Flexas, M.M. An observing system simulation experiment for the calibration and validation of the Surface Water Ocean Topography sea surface height measurement using in situ platforms. J. Atmos. Ocean. Technol. 2018, 35, 281–297. [Google Scholar] [CrossRef]
- Chupin, C.; Ballu, V.; Testut, L.; Tranchant, Y.T.; Calzas, M.; Poirier, E.; Coulombier, T.; Laurain, O.; Bonnefond, P.; FOAM Project Team. Mapping sea surface height using new concepts of kinematic GNSS instruments. Remote Sens. 2020, 12, 2656. [Google Scholar] [CrossRef]
- Sánchez-Román, A.; Pascual, A.; Pujol, M.I.; Taburet, G.; Marcos, M.; Faugère, Y. Assessment of DUACS Sentinel-3A altimetry data in the coastal band of the European Seas: Comparison with tide gauge measurements. Remote Sens. 2020, 12, 3970. [Google Scholar] [CrossRef]
- Clerc, S.; Donlon, C.; Borde, F.; Lamquin, N.; Hunt, S.E.; Smith, D.; McMillan, M.; Mittaz, J.; Woolliams, E.; Hammond, M.; et al. Benefits and lessons learned from the Sentinel-3 tandem phase. Remote Sens. 2020, 12, 2668. [Google Scholar] [CrossRef]
- Jiang, H. Indirect validation of ocean remote sensing data via numerical model: An example of wave heights from altimeter. Remote Sens. 2020, 12, 2627. [Google Scholar] [CrossRef]
- Jia, Y.; Yang, J.; Lin, M.; Zhang, Y.; Ma, C.; Fan, C. Global assessments of the HY-2B measurements and cross-calibrations with Jason-3. Remote Sens. 2020, 12, 2470. [Google Scholar] [CrossRef]
- Wang, J.; Aouf, L.; Jia, Y.; Zhang, Y. Validation and calibration of significant wave height and wind speed retrievals from HY2B altimeter based on Deep Learning. Remote Sens. 2020, 12, 2858. [Google Scholar] [CrossRef]
- Ichikawa, K.; Wang, X.F.; Tamura, H. Capability of Jason-2 subwaveform retrackers for significant wave height in the calm semi-enclosed Celebes Sea. Remote Sens. 2020, 12, 3367. [Google Scholar] [CrossRef]
- Schlembach, F.; Passaro, M.; Quartly, G.D.; Kurekin, A.; Nencioli, F.; Dodet, G.; Piollé, J.F.; Ardhuin, F.; Bidlot, J.; Schwatke, C.; et al. Round Robin assessment of radar altimeter Low Resolution Mode and Delay-Doppler retracking algorithms for significant wave height. Remote Sens. 2020, 12, 1254. [Google Scholar] [CrossRef]
- Quartly, G.D.; Kurekin, A.A. Sensitivity of altimeter wave height assessment to data selection. Remote Sens. 2020, 12, 2608. [Google Scholar] [CrossRef]
- Nencioli, F.; Quartly, G.D. Evaluation of Sentinel-3A wave height observations near the coast of southwest England. Remote Sens. 2019, 11, 2998. [Google Scholar] [CrossRef]
- Nielsen, K.; Andersen, O.B.; Ranndal, H. Validation of Sentinel-3A based lake level over US and Canada. Remote Sens. 2020, 12, 2835. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Bergé-Nguyen, M.; Calmant, S.; Jamangulova, N.; Satylkanov, R.; Lyard, F.; Perosanz, F.; Verron, J.; Samine Montazem, A.; Le Guilcher, G.; et al. Absolute calibration or validation of the altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. [Google Scholar] [CrossRef]
- Taburet, N.; Zawadzki, L.; Vayre, M.; Blumstein, D.; Le Gac, S.; Boy, F.; Raynal, M.; Labroue, S.; Crétaux, J.F.; Femenias, P. S3MPC: Improvement on inland water tracking and water level monitoring from the OLTC onboard Sentinel-3 altimeters. Remote Sens. 2020, 12, 3055. [Google Scholar] [CrossRef]
- Lacroix, P.; Dechambre, M.; Legrésy, B.; Blarel, F.; Rémy, F. On the use of the dual-frequency ENVISAT altimeter to determine snowpack properties of the Antarctic ice sheet. Remote Sens. Environ. 2008, 112, 1712–1729. [Google Scholar] [CrossRef]
- Frery, M.L.; Siméon, M.; Goldstein, C.; Féménias, P.; Borde, F.; Houpert, A.; Olea Garcia, A. Sentinel-3 microwave radiometers: Instrument description, calibration and geophysical products performances. Remote Sens. 2020, 12, 2590. [Google Scholar] [CrossRef]
- Picard, B.; Bennartz, R.; Fell, F.; Frery, M.L.; Siméon, M.; Bordes, F. Assessment of the “zero-bias line” homogenization method for microwave radiometers using Sentinel-3A and Sentinel-3B tandem phase. Remote Sens. 2020, 12, 3154. [Google Scholar] [CrossRef]
- Morrow, R.; Fu, L.L.; Ardhuin, F.; Benkiran, M.; Chapron, B.; Cosme, E.; d’Ovidio, F.; Farrar, J.T.; Gille, S.T.; Lapeyre, G.; et al. Global observations of fine-scale ocean surface topography with the Surface Water and Ocean Topography (SWOT) mission. Front. Mar. Sci. 2019, 6, 232. [Google Scholar] [CrossRef]
- Ma, C.; Guo, X.; Zhang, H.; Di, J.; Chen, G. An investigation of the influences of SWOT sampling and errors on ocean eddy observation. Remote Sens. 2020, 12, 2682. [Google Scholar] [CrossRef]
- Qiu, B.; Chen, S.; Klein, P.; Wang, J.; Torres, H.; Fu, L.L.; Menemenlis, D. Seasonality in transition scale from balanced to unbalanced motions in the world ocean. J. Phys. Oceanogr. 2018, 48, 591–605. [Google Scholar] [CrossRef]
- Dibarboure, G.; Labroue, S.; Ablain, M.; Fjortoft, R.; Mallet, A.; Lambin, J.; Souyris, J. Empirical cross-calibration of coherent SWOT errors using external references and the altimetry constellation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2325–2344. [Google Scholar] [CrossRef]
- Gómez-Navarro, L.; Cosme, E.; Sommer, J.L.; Papadakis, N.; Pascual, A. Development of an image de-noising method in preparation for the Surface Water and Ocean Topography satellite mission. Remote Sens. 2020, 12, 734. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Fu, L.L. An observing system simulation experiment for ocean state estimation to assess the performance of the SWOT mission: Part 1—A twin experiment. J. Geophys. Res. Ocean. 2019, 124, 4838–4855. [Google Scholar] [CrossRef]
- Zhang, Q.; Yu, F.; Chen, G. The difference of sea level variability by steric height and altimetry in the North Pacific. Remote Sens. 2020, 12, 379. [Google Scholar] [CrossRef]
- D’Ovidio, F.; Pascual, A.; Wang, J.; Doglioli, A.M.; Jing, Z.; Moreau, S.; Grégori, G.; Swart, S.; Speich, S.; Cyr, F.; et al. Frontiers in fine-scale in situ studies: Opportunities during the SWOT fast sampling phase. Front. Mar. Sci. 2019, 6, 168. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quartly, G.D.; Chen, G.; Nencioli, F.; Morrow, R.; Picot, N. An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters. Remote Sens. 2021, 13, 125. https://doi.org/10.3390/rs13010125
Quartly GD, Chen G, Nencioli F, Morrow R, Picot N. An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters. Remote Sensing. 2021; 13(1):125. https://doi.org/10.3390/rs13010125
Chicago/Turabian StyleQuartly, Graham D., Ge Chen, Francesco Nencioli, Rosemary Morrow, and Nicolas Picot. 2021. "An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters" Remote Sensing 13, no. 1: 125. https://doi.org/10.3390/rs13010125
APA StyleQuartly, G. D., Chen, G., Nencioli, F., Morrow, R., & Picot, N. (2021). An Overview of Requirements, Procedures and Current Advances in the Calibration/Validation of Radar Altimeters. Remote Sensing, 13(1), 125. https://doi.org/10.3390/rs13010125