Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods

 ,
,  ,
,  , and
, and
Abstract

1. Introduction
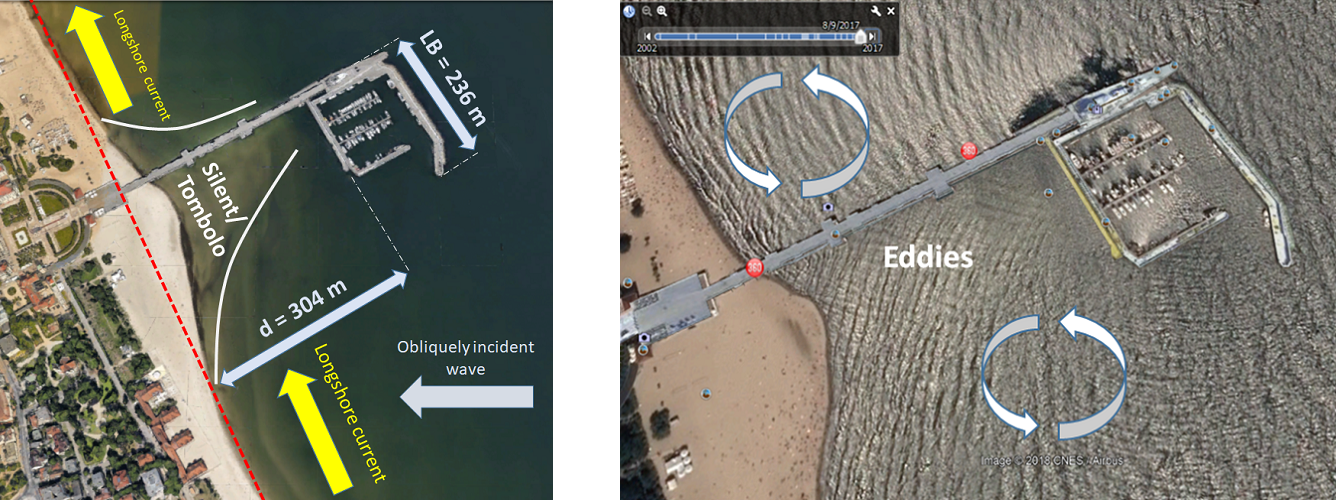
- Salient: When LB* is less than approx. 0.6 to 0.7, a bell-shaped salient in the shoreline will form in the lee of the breakwater. However, parameters other than the breakwater length and distance also influence the accumulation pattern.
- Tombolo: When LB* is greater than approx. 0.9 to 1.0, the sand accumulation behind the breakwater will connect the beach to the breakwater in a tombolo formation. But again, parameters other than the breakwater length and distance influence the accumulation pattern.
2. Materials and Methods
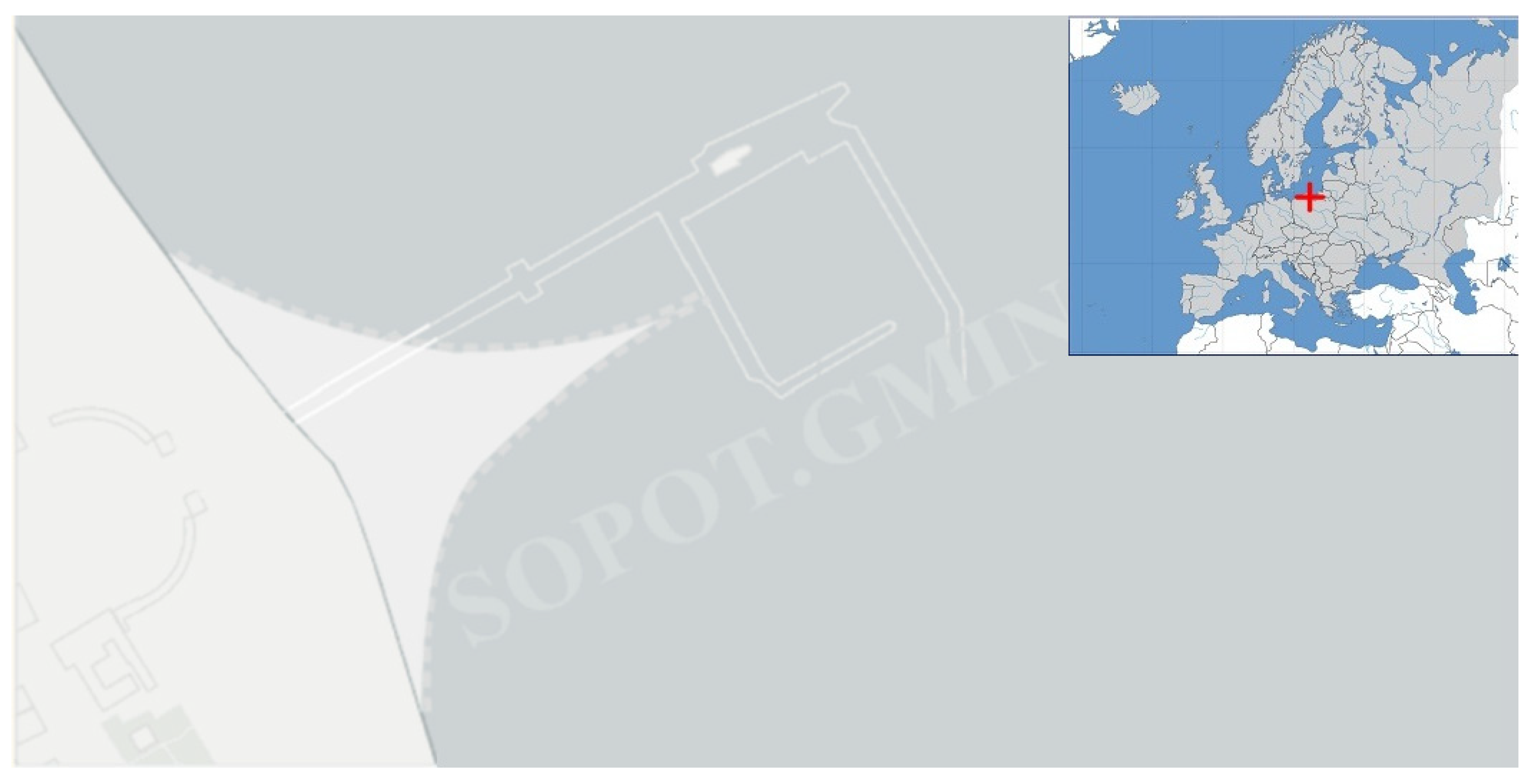
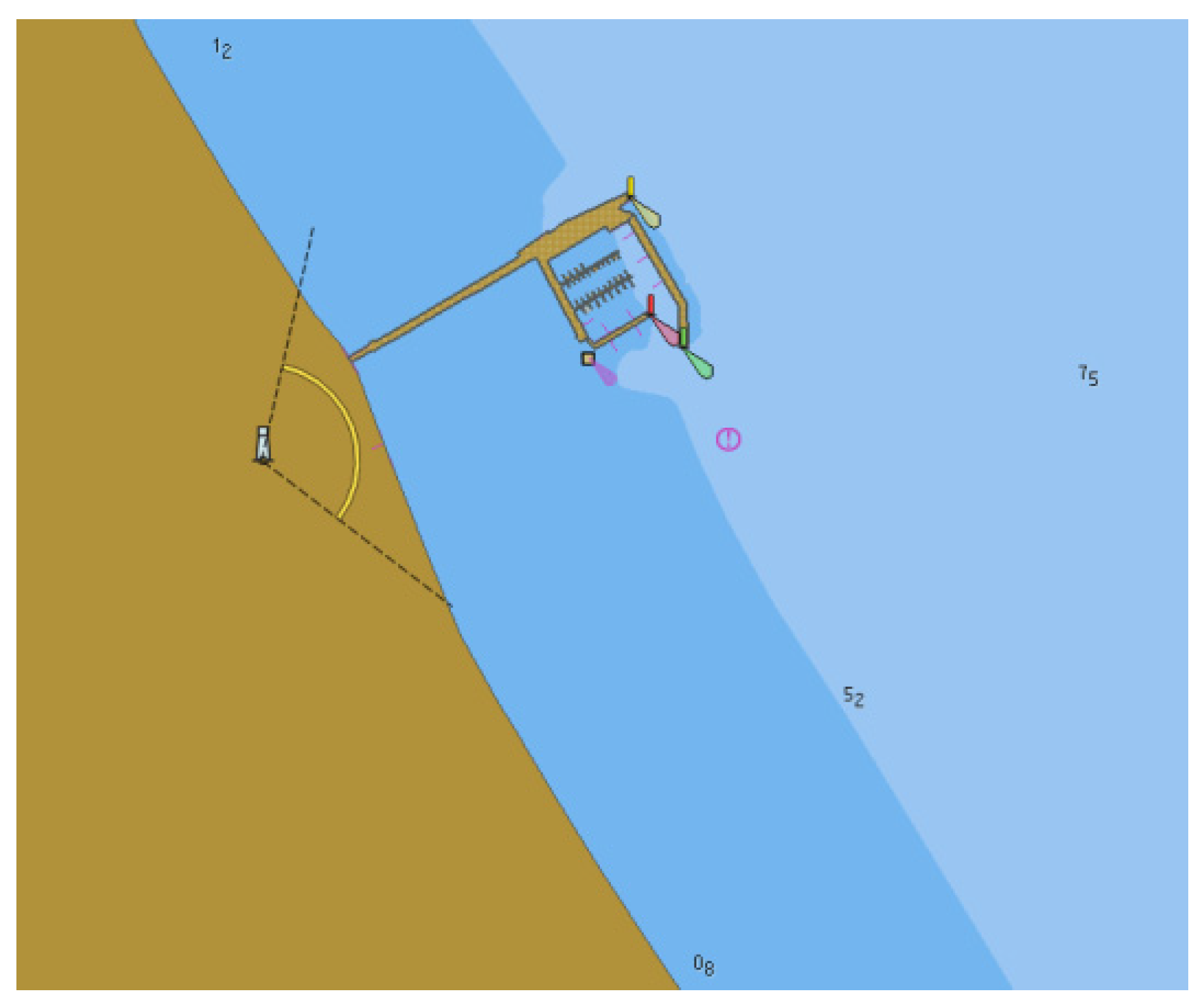
2.1. Study Area
2.2. Measurement Concept
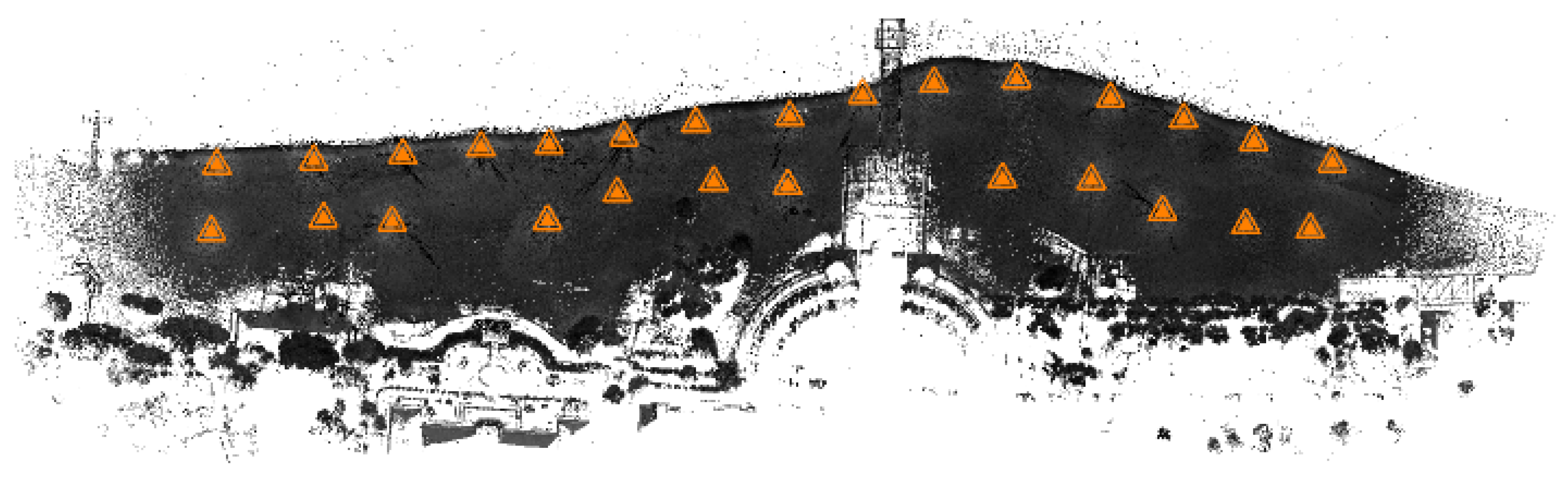
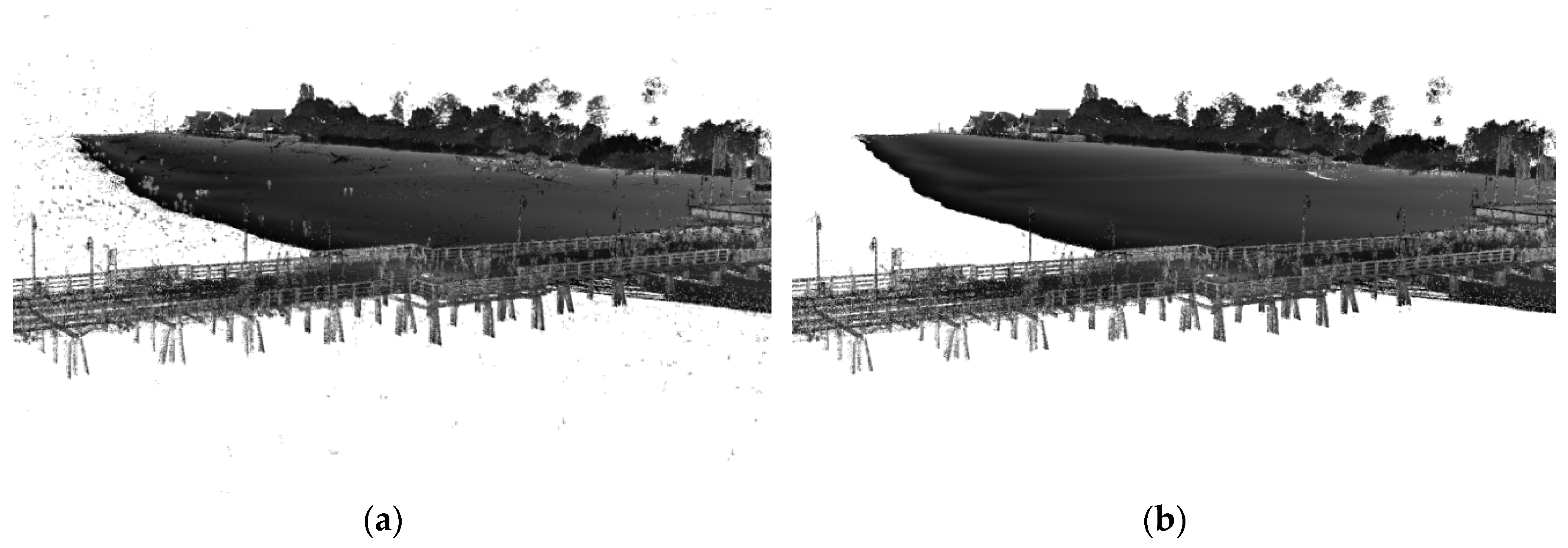
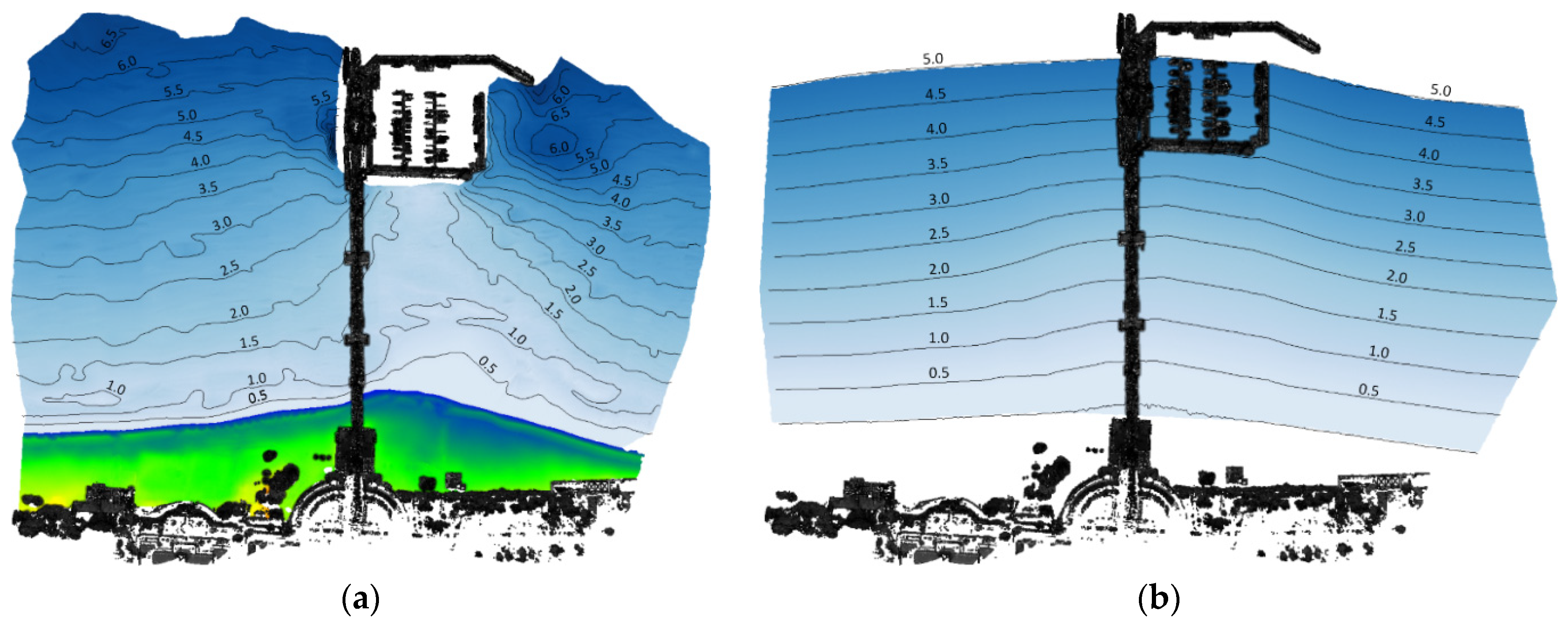
- Land measurements (geodesy) enable the acquisition of geospatial data of a beach section adjacent to the sea. Measurements of this type can be carried out in two ways. In order to obtain a precise 3D model of the beach adjacent to the shore, the best solution is the use of the terrestrial laser scanning (TLS) [30,31,32]. However, this is a time-consuming method, it requires expensive measurement equipment and advanced methods of point cloud processing. The predicted positioning accuracy (3D) is 2–3 cm, for distances up to 100 m (Figure 6a). An alternative to TLS is the use of photogrammetric methods, where the beach model is developed based on a sequence of photos from the UAV [33,34,35]. The predicted model accuracy (3D) depends on the positioning accuracy of the global navigation satellite systems (GNSSs) used and the type of photogrammetric camera used, ranging from 5 cm to 1 m (Figure 6b).
- Sea surveys (hydrography) for depths below 1 m require the use of an atypical hydrographic vessel that has a very small draft and is equipped with a specialized echo sounder dedicated to ultra-shallow waters, the range of which should be at least 30 cm. The predicted accuracy of this solution allows a depth accuracy of 2–5 cm root mean square (RMS) (Figure 7a). An alternative solution to the use of a manned hydrographic vessel is the use of an unmanned surface vehicle (USV), which is increasingly used in bathymetric measurements [36,37,38]. The predicted accuracy of bathymetric measurements is identical to that of manned hydrographic measurements (Figure 7b).
- Sea surveys (hydrography) for depths: 0–0.6 m are specific because this part of the waterbody could not, for obvious reasons, be measured by a manned vessel. Therefore, no actual bathymetric data that could determine the spread of the tombolo phenomenon were available in this area. Currently, bathymetric measurements in ultra-shallow waters and on the coastline are carried out by either tachymetric [39] or geodetic method with a person stepping into the sea to a predefined depth using a GNSS receiver operating in real time [40,41,42].
2.2.1. Geodetic Measurements
- Sensor: 1/2.3” (CMOS), effective px: 12.35 M (total px: 12.71 M).
- Lens: FOV 78.8° 28 mm (35 mm format equivalent) f/2.2.
- Distortion: <1.5% focus from 0.5 m to ∞.
- ISO range: 100–3200 (video), 100–1600 (photo).
- Shutter speed: 8 s–1/8000 s.
- Image max size: 4000 × 3000.
2.2.2. Hydrographic Measurements
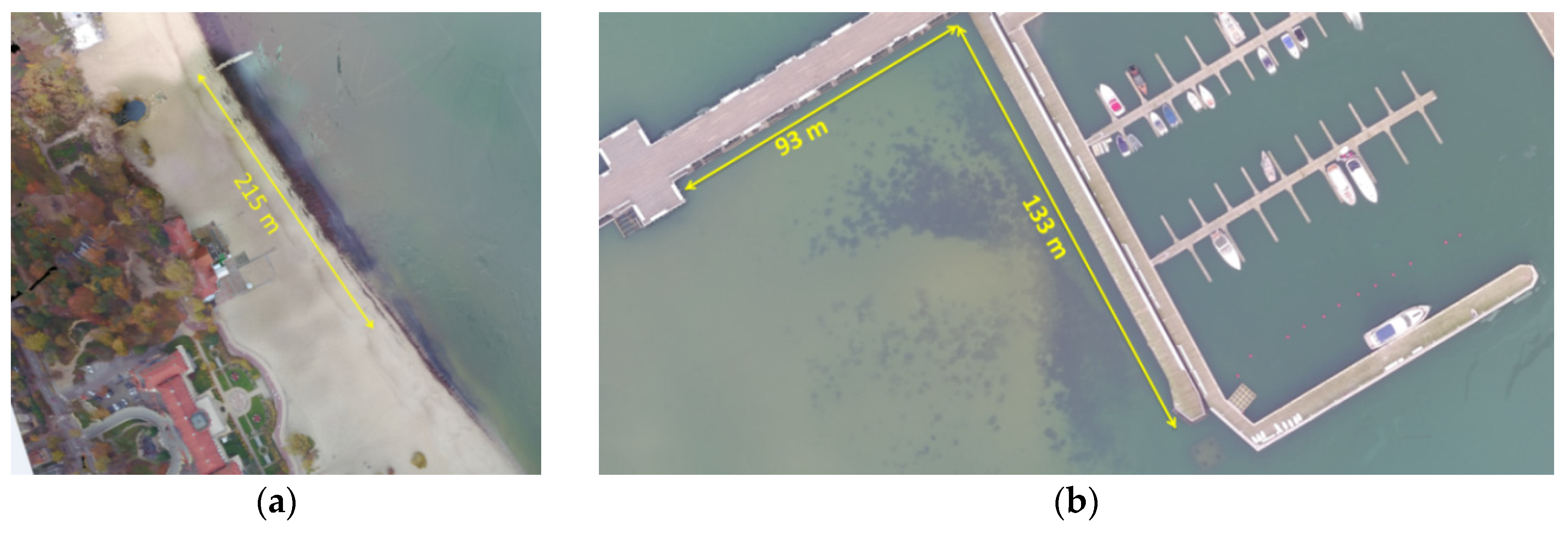
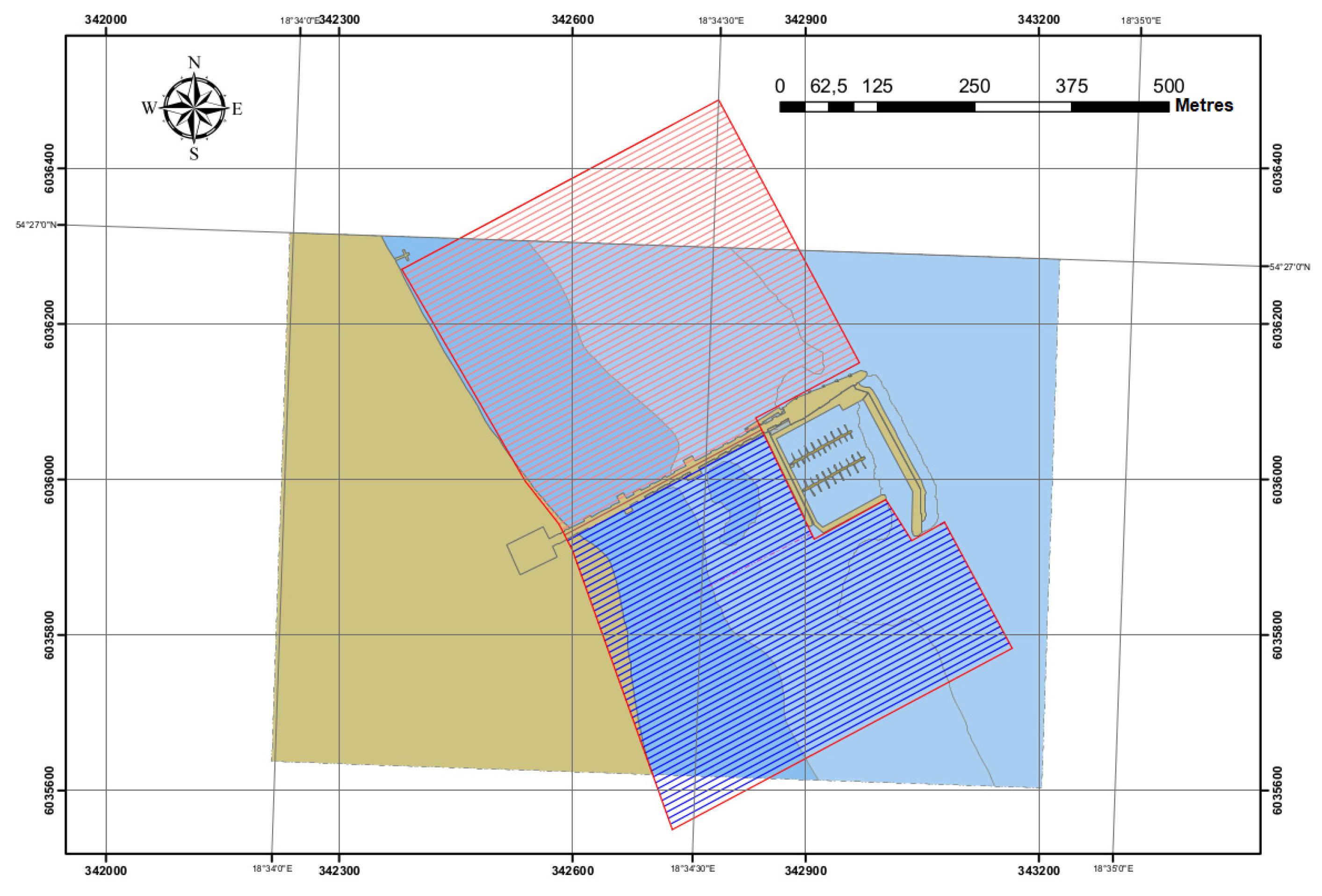
- Area includes a rectangle 800 m long, calculated along the coast and symmetrical to the pier and 500 m wide corresponding to the pier length, excluding the marina (Figure 10).
- Profile length: 285–492 m.
- Total length of profiles: 42 km.
- Distance between profiles: 8 m.
- Minimum planned depth: 40 cm.
- Sea level will be provided by the gauging stations of the Institute of Meteorology and Water Management (IMGW) in Gdańsk Port Północny and Gdynia.
3. Results
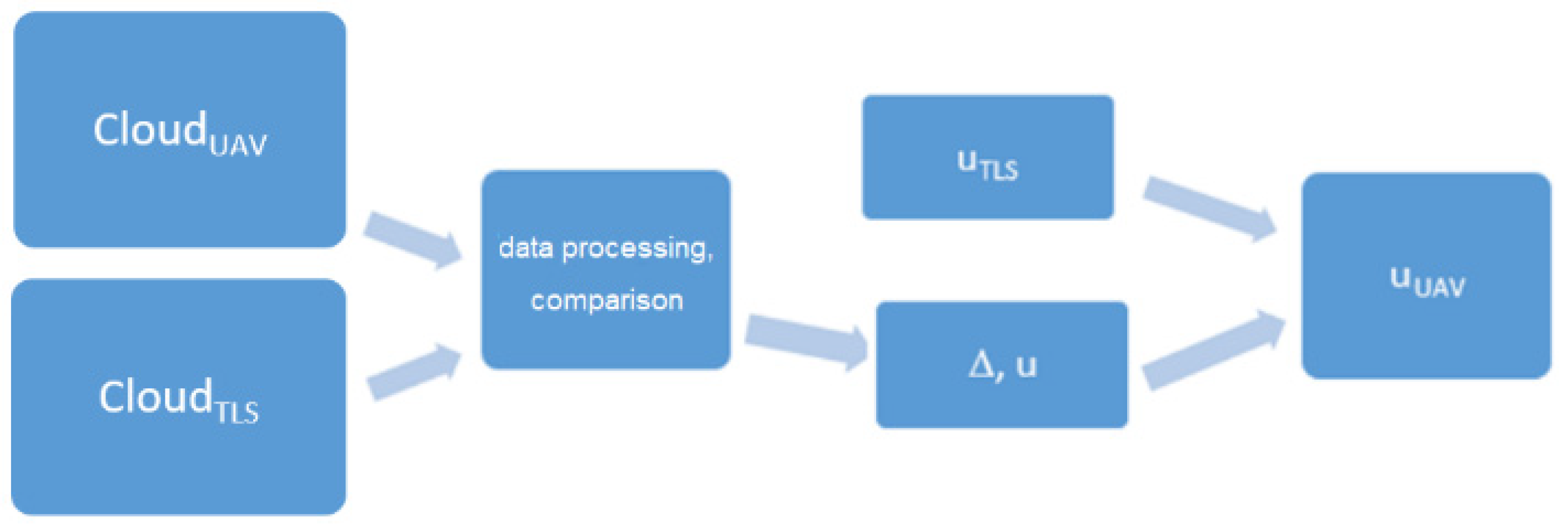
3.1. Geodetic Measurement Results
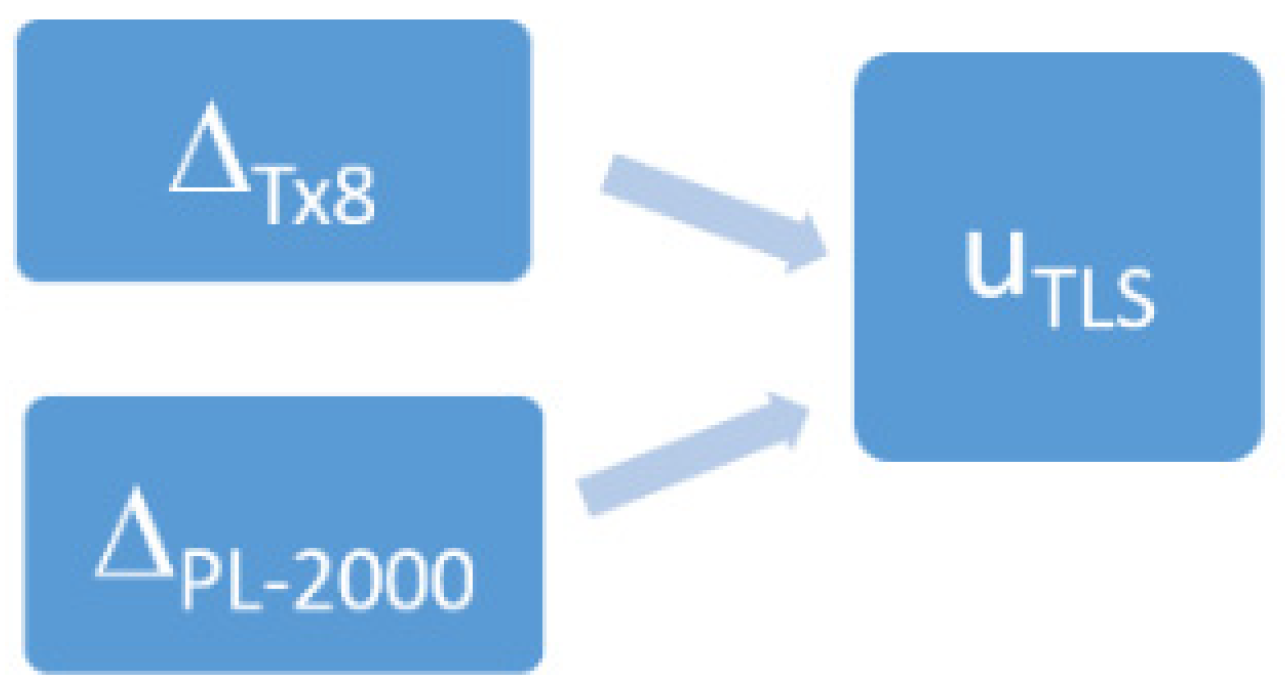
- Inaccuracy of the Trimble Tx8 laser scanner—1 cm horizontally and 1.5 cm vertically.
- Inaccuracy of the Trimble R10 GNSS receiver used to determine the coordinates of reference points—1 cm horizontally and 1.5 cm vertically.
- Inaccuracy of the PL-2000 system—2 cm horizontally and vertically.
- Camera px resolution—2.25 cm.
- Inaccuracy of UAV position: X, Y—a few meters, Z—several meters.
- Reference system TLS accuracy.
- Satellite receiver R10 maximum errors.
- PL-2000 system errors threshold values.
3.2. Hydrographic Measurement Results
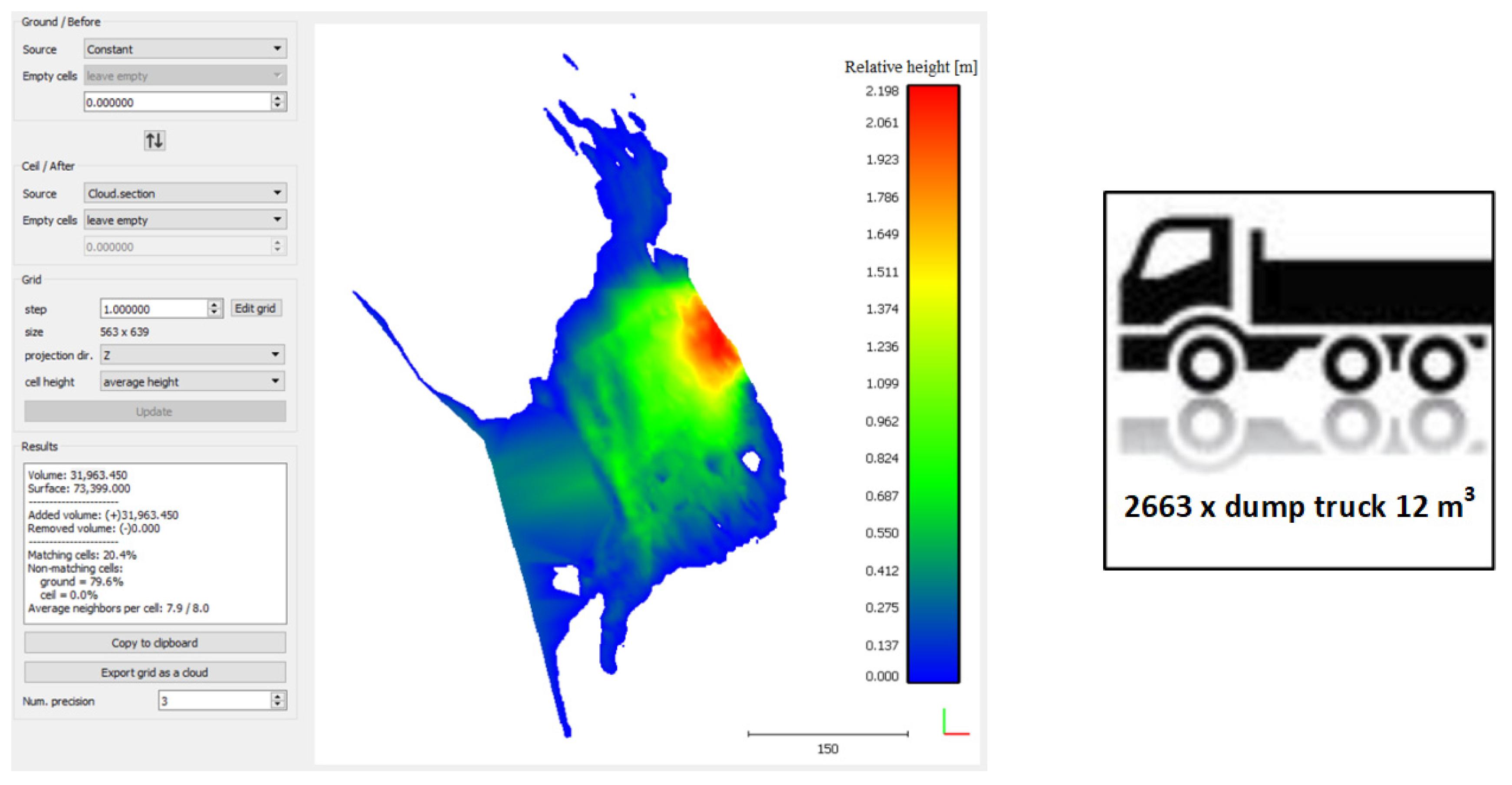
3.3. Additional Research Results
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- National Academy of Sciences. Climate change: Evidence and Causes; National Academies Press: Washington, DC, USA, 2014. [Google Scholar]
- Ming, D.; Chiew, Y.-M. Shoreline changes behind detached breakwater. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 63–70. [Google Scholar] [CrossRef]
- Szruba, M. Sea shore protection. Mod. Eng. Constr. 2017, 1, 60–63. (In Polish) [Google Scholar]
- United States Army Corps of Engineers. Shore Protection Manual; USACE: Washington, DC, USA, 1984; Volume 1. [Google Scholar]
- Wawrzyńska, A. Analysis of the causes of security risks for port and marine infrastructure. Part three: Structures protecting the sea shore. Works Fac. Navig. Gdyn. Marit. Univ. 2013, 28, 59–66. (In Polish) [Google Scholar] [CrossRef]
- Łabuz, T. Ways to Protect Sea Shores and Their Impact on the Natural Environment of the Polish Baltic Coast. Available online: http://awsassets.wwfpl.panda.org/downloads/raportochronabrzegow.pdf (accessed on 27 January 2020). (In Polish).
- President of the City of Sopot. Response to question No. 154/2016 of 7 December 2016. Available online: https://bip.umsopot.nv.pl/Download/get/id,32756.html (accessed on 9 June 2019). (In Polish).
- Mohamed, A.S. 2D and 1D numerical model simulations for the effect of a single detached breakwater on the shore. MSc Thesis, Delft University of Technology, Delft, The Netherlands, 1997. [Google Scholar]
- Institute of Oceanology of the Polish Academy of Sciences. Conducting Research and Modeling of the Seafloor and Sea Shore Near the Pier in Sopot. Available online: https://bip.umsopot.nv.pl/Download/get/id,32756.html (accessed on 9 June 2019). (In Polish).
- Mangor, K.; Drønen, N.K.; Kaergaard, K.H.; Kristensen, N.E. Shoreline Management Guidelines. Available online: https://www.dhigroup.com/marine-water/ebook-shoreline-management-guidelines (accessed on 27 January 2020).
- Kim, H. Three-dimensional sediment transport model. PhD Thesis, University of Liverpool, Liverpool, UK, 1993. [Google Scholar]
- O’Connor, B.A.; Nicholson, J. A three-dimensional model of suspended particulate sediment transport. Coast. Eng. 1988, 12, 157–174. [Google Scholar] [CrossRef]
- Kuroiwa, M.; Kamphuis, J.W.; Kuchiishi, T.; Matsubara, Y.; Noda, H. Medium-term Q-3D coastal area model with shoreline change around coastal structures. In Proceedings of the 29th International Conference on Coastal Engineering (ICCE 2004), Lisbon, Portugal, 19–24 September 2004. [Google Scholar]
- Watanabe, A.; Maruyama, K.; Shimizu, T.; Sakakiyama, T. Numerical prediction model of three-dimensional beach deformation around a structure. Coast. Eng. Jap. 1986, 29, 179–194. [Google Scholar] [CrossRef]
- Shimizu, T.; Kumagai, T.; Watanabe, A. Improved 3-D beach evolution model coupled with the shoreline model (3D-SHORE). In Proceedings of the 25th International Conference on Coastal Engineering (ICCE 1996), Orlando, FL, USA, 2–6 September 1996. [Google Scholar]
- Jörissen, J.G.L. Strandhoofden Gemodelleerd in Delft3D-RAM: Strandhoofden als Instrument voor het Regelen van het Langstransport. MSc Thesis, Delft University of Technology, Delft, The Netherlands, December 2001. [Google Scholar]
- Nam, P.T. Numerical Model of Beach Topography Evolution Due to Waves and Currents. Special Emphasis on Coastal Structures. Available online: https://pdfs.semanticscholar.org/c5af/bff0cb81a3dff8f2cc3528016c85bb1b1107.pdf?_ga=2.233758174.1954626850.1580128302-234920152.1580128302 (accessed on 27 January 2020).
- Kuchiishi, T.; Kato, K.; Kuroiwa, M.; Matsubara, Y.; Noda, H. Applicability of 3D morphodynamic model with shoreline change using a quasi-3D nearshore current model. In Proceedings of the 14th International Offshore and Polar Engineering Conference (ISOPE 2004), Toulon, France, 23–28 May 2004. [Google Scholar]
- Roelvink, D.; Giles, L.; van der Wegen, M. Morphological modelling of the wet-dry interface at various timescales. In Proceedings of the 7th International Conference on Hydroscience and Engineering (ICHE 2006), Philadelphia, PA, USA, 10–13 September 2006. [Google Scholar]
- van Koningsveld, M.; van Kessel, T.; Walstra, D.-J.R. A hybrid modelling approach to coastal morphology. In Proceedings of the 5th Coastal Dynamics International Conference (CD 2005), Barcelona, Spain, 4–8 April 2005. [Google Scholar]
- Kim, H.; Lee, S.; Park, D.; Lim, H.S. Simulation of tombolo evolution by using CST3D-WA. Vibroeng. PROCEDIA 2017, 12, 196–201. [Google Scholar]
- Sopot City Hall. 2016: Tombolo Connects the Beach with the Marina. Available online: https://sopot.gmina.pl/raport-marina-tombolo-2016/ (accessed on 27 January 2020). (In Polish).
- Sopot NaszeMiasto.pl. Black beach in Sopot? The City Calms down that it’s Temporary. Available online: https://sopot.naszemiasto.pl/czarna-plaza-w-sopocie-miasto-uspokaja-ze-to-chwilowe/ar/c1-4272244 (accessed on 27 January 2020). (In Polish).
- Sopot NaszeMiasto.pl. Sopot Beach to be Corrected Again. Alignment is in Progress. Available online: http://sopot.naszemiasto.pl/artykul/sopocka-plaza-znowu-do-poprawki-trwa-wyrownywanie-zdjecia,2253932,artgal,t,id,tm.html (accessed on 27 January 2020). (In Polish).
- Specht, C.; Dąbrowski, P.S.; Specht, M.; Makar, A.; Marchel, Ł.; Skóra, M.; Cywiński, P.; Szychowski, P. Research on the Tombolo Effect of the Marina in Sopot. Available online: https://www.researchgate.net/publication/328998312_Badania_efektu_Tombolo_mariny_w_Sopocie (accessed on 27 January 2020). (In Polish).
- Trójmiasto.Wyborcza.pl. A Sand Island has Grown up at the Pier in Sopot. The Sand on the Cliff in Gdynia is Decreasing. Available online: http://trojmiasto.wyborcza.pl/trojmiasto/1,35612,20860078,wyrosla-piaskowa-wyspa-przy-molo-w-sopocie-ubywa-za-to-piasku.html (accessed on 27 January 2020). (In Polish).
- Dziennik Bałtycki. A cliff slumped in Gdynia. At Orłowska Street Part of the Cliff Slumped. A Search and Rescue Team Worked on Site. There are no Victims. Available online: https://dziennikbaltycki.pl/w-gdyni-osunal-sie-klif-przy-ul-orlowskiej-osunela-sie-czesc-klifu-na-miejscu-pracowala-grupa-poszukiwawczoratownicza-nie-ma/ar/12936510 (accessed on 27 January 2020). (In Polish).
- Kaulbarsz, D. Geology and glaciotectonics of the Orłowo Cliff in Gdynia, northern Poland. Geol. Rev. 2005, 53, 572–581. (In Polish) [Google Scholar]
- Szukalski, J. Nature reserve Kępa Redłowska. Ann. Gdyn. 1997, 12, 201–206. (In Polish) [Google Scholar]
- Bareth, G.; Bendig, J.; Tilly, N.; Hoffmeister, D.; Aasen, H.; Bolten, A. A comparison of UAV- and TLS-derived plant height for crop monitoring: Using polygon grids for the analysis of Crop Surface Models (CSMs). Photogramm. Fernerkund. Geoinf. 2016, 2, 85–94. [Google Scholar] [CrossRef]
- Ruggles, S.; Clark, J.; Franke, K.W.; Wolfe, D.; Reimschiissel, B.; Martin, R.A.; Okeson, T.J.; Hedengren, J.D. Comparison of SfM computer vision point clouds of a landslide derived from multiple small UAV platforms and sensors to a TLS based model. J. Unmanned Veh. Syst. 2016, 4, 246–265. [Google Scholar] [CrossRef]
- Xiong, L.; Wang, G.; Bao, Y.; Zhou, X.; Wang, K.; Liu, H.; Sun, X.; Zhao, R. A rapid terrestrial laser scanning method for coastal erosion studies: A case study at Freeport, Texas, USA. Sensors 2019, 19, 3252. [Google Scholar] [CrossRef] [PubMed]
- Burdziakowski, P. Low cost real time UAV stereo photogrammetry modelling technique—Accuracy considerations. E3S Web Conf. 2018, 63, 00020. [Google Scholar] [CrossRef]
- Burdziakowski, P. UAV in todays photogrammetry—Application areas and challenges. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference (SGEM 2018), Albena, Bulgaria, 2–8 July 2018. [Google Scholar]
- Casella, E.; Drechsel, J.; Winter, C.; Benninghoff, M.; Rovere, A. Accuracy of sand beach topography surveying by drones and photogrammetry. Geo-Mar. Lett. 2020, 1–14. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M. Determination of the territorial sea baseline—Aspect of using unmanned hydrographic vessels. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2016, 10, 649–654. [Google Scholar] [CrossRef]
- Specht, M.; Specht, C.; Lasota, H.; Cywiński, P. Assessment of the steering precision of a hydrographic Unmanned Surface Vessel (USV) along sounding profiles using a low-cost multi-Global Navigation Satellite System (GNSS) receiver supported autopilot. Sensors 2019, 19, 3939. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore construction detection by automotive radar for the needs of autonomous surface vehicle navigation. ISPRS Int. J. Geo-Inf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Ochałek, A.; Lipecki, T.; Jaśkowski, W.; Jabłoński, M. Modeling and analysis of integrated bathymetric and geodetic data for inventory surveys of mining water reservoirs. E3S Web Conf. 2018, 35, 04005. [Google Scholar] [CrossRef]
- Baptista, P.; Bastos, L.; Bernardes, C.; Cunha, T.; Dias, J. Monitoring sandy shores morphologies by DGPS—A practical tool to generate digital elevation models. J. Coast. Res. 2008, 24, 1516–1528. [Google Scholar] [CrossRef]
- Specht, C.; Specht, M.; Cywiński, P.; Skóra, M.; Marchel, Ł.; Szychowski, P. A new method for determining the territorial sea baseline using an unmanned, hydrographic surface vessel. J. Coast. Res. 2019, 35, 925–936. [Google Scholar] [CrossRef]
- Specht, C.; Weintrit, A.; Specht, M.; Dabrowski, P. Determination of the territorial sea baseline—Measurement aspect. IOP Conf. Ser. Earth Environ. Sci. 2017, 95, 1–10. [Google Scholar] [CrossRef]
- Makar, A. The sea bottom surface described by coons pieces. Sci. J. Marit. Univ. Szczec. 2016, 45, 187–190. [Google Scholar]
- Council of Ministers of the Republic of Poland. Ordinance of the Council of Ministers of 15 October 2012 on the National Spatial Reference System; Council of Ministers of the Republic of Poland: Warsaw, Poland, 2012. (In Polish)
- Sassais, R.; Makar, A. Methods to generate numerical models of terrain for spatial ENC presentation. Ann. Navig. 2011, 18, 69–81. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Naus, K.; Grządziel, A.; Iwen, D. Methodology for performing territorial sea baseline measurements in selected waterbodies of Poland. Applied Sciences 2019, 9, 3053. [Google Scholar] [CrossRef]
- Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Marchel, Ł.; Specht, M. Metrological aspects of the tombolo effect investigation—Polish case study. In Proceedings of the 2019 IMEKO TC-19 International Workshop on Metrology for the Sea (IMEKO 2019), Genova, Italy, 3–5 October 2019. [Google Scholar]
- Masnicki, R.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Specht, M. Accuracy analysis of measuring X-Y-Z coordinates with regard to the investigation of the tombolo effect. Sensors 2020, 20, 1167. [Google Scholar] [CrossRef]
- Joint Committee for Guides in Metrology. Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement, 1st ed.; JCGM: Sèvres, France, 2008. [Google Scholar]
- Stateczny, A.; Grońska, D.; Motyl, W. Hydrodron—New step for professional hydrography for restricted waters. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- Stateczny, A.; Włodarczyk-Sielicka, M.; Grońska, D.; Motyl, W. Multibeam echosounder and LiDAR in process of 360-degree numerical map production for restricted waters with HydroDron. In Proceedings of the 2018 Baltic Geodetic Congress, Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- Specht, M.; Specht, C.; Wąż, M.; Dąbrowski, P.; Skóra, M.; Marchel, Ł. Determining the variability of the territorial sea baseline on the example of waterbody adjacent to the municipal beach in Gdynia. Appl. Sci. 2019, 9, 3867. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Max Error | Probability Distribution | Standard Uncertainty |
|---|---|---|---|
| (X, Y)Tx8 | 1 cm | uniform | 0.58 cm |
| (X, Y)R10 | 1 cm | uniform | 0.58 cm |
| (X, Y)PL-2000 | 2 cm | uniform | 1.15 cm |
| uTLS(X, Y) | 1.41 cm |
| Quantity | Max Error | Probability Distribution | Standard Uncertainty |
|---|---|---|---|
| (Z)Tx8 | 1.5 cm | uniform | 0.87 cm |
| (Z)R10 | 1.5 cm | uniform | 0.87 cm |
| (Z)PL-2000 | 2 cm | uniform | 1.15 cm |
| uTLS(Z) | 1.68 cm |
| Month and Year | Surface Area [m2] | Increase in Surface Area [m2] |
|---|---|---|
| May 2008 | 37 786 | 0 |
| July 2010 | 41 834 | 4 048 |
| April 2011 | 42 583 | 4 797 |
| May 2012 | 40 600 | 2 814 |
| June 2013 | 40 364 | 2 578 |
| July 2014 | 48 059 | 10 273 |
| October 2015 | 45 404 | 7 618 |
| September 2016 | 47 977 | 10 191 |
| August 2017 | 50 830 | 13 044 |
| May 2018 | 50 848 | 13 062 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, M.; Specht, C.; Mindykowski, J.; Dąbrowski, P.; Maśnicki, R.; Makar, A. Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sens. 2020, 12, 737. https://doi.org/10.3390/rs12040737
Specht M, Specht C, Mindykowski J, Dąbrowski P, Maśnicki R, Makar A. Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sensing. 2020; 12(4):737. https://doi.org/10.3390/rs12040737
Chicago/Turabian StyleSpecht, Mariusz, Cezary Specht, Janusz Mindykowski, Paweł Dąbrowski, Romuald Maśnicki, and Artur Makar. 2020. "Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods" Remote Sensing 12, no. 4: 737. https://doi.org/10.3390/rs12040737
APA StyleSpecht, M., Specht, C., Mindykowski, J., Dąbrowski, P., Maśnicki, R., & Makar, A. (2020). Geospatial Modeling of the Tombolo Phenomenon in Sopot using Integrated Geodetic and Hydrographic Measurement Methods. Remote Sensing, 12(4), 737. https://doi.org/10.3390/rs12040737