A Fast Bistatic ISAR Imaging Approach for Rapidly Spinning Targets via Exploiting SAR Technique



Abstract
1. Introduction
2. Bistatic ISAR Imaging for Targets with Rapidly Spinning Motion
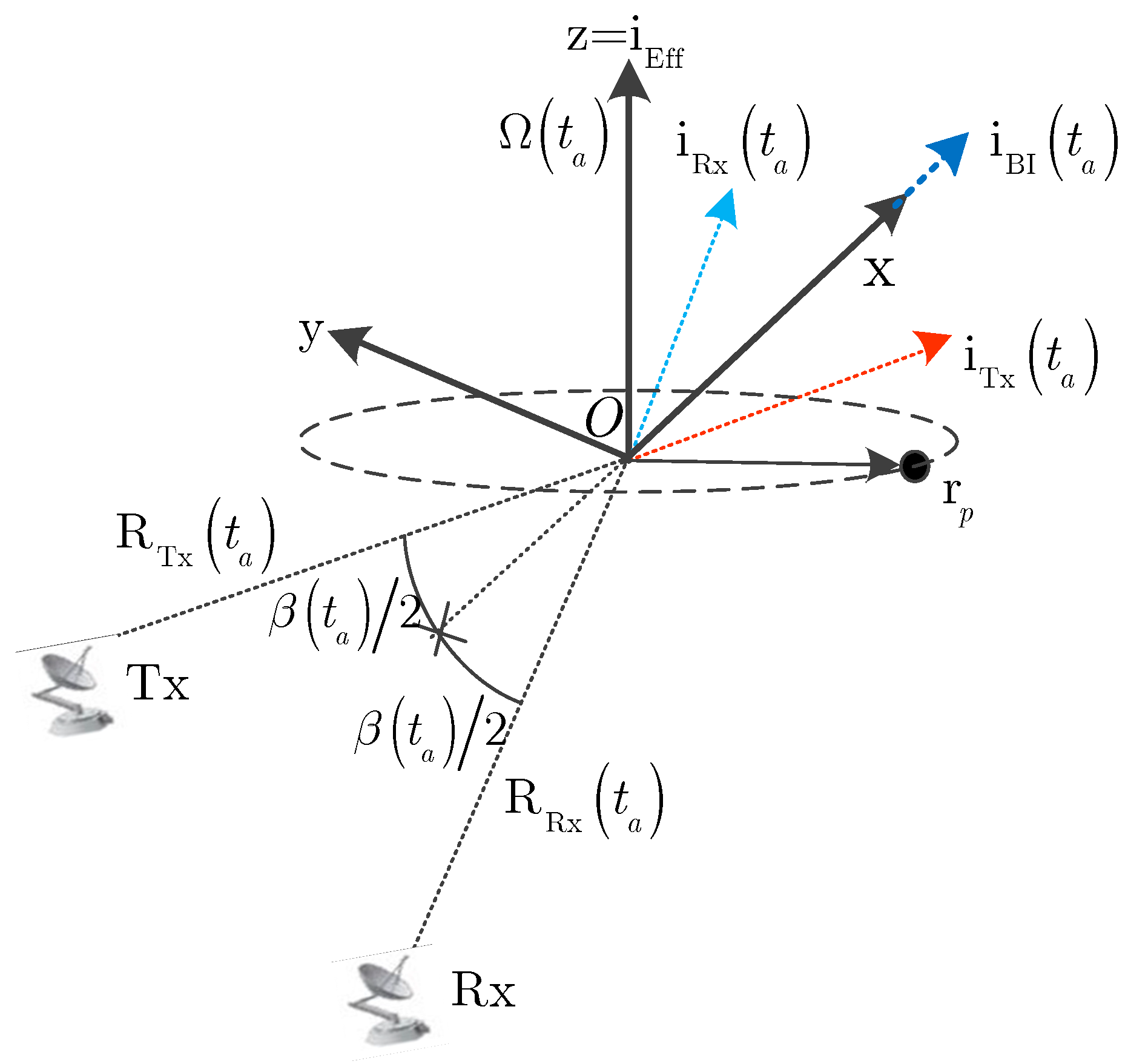
2.1. Geometry and Signal Model
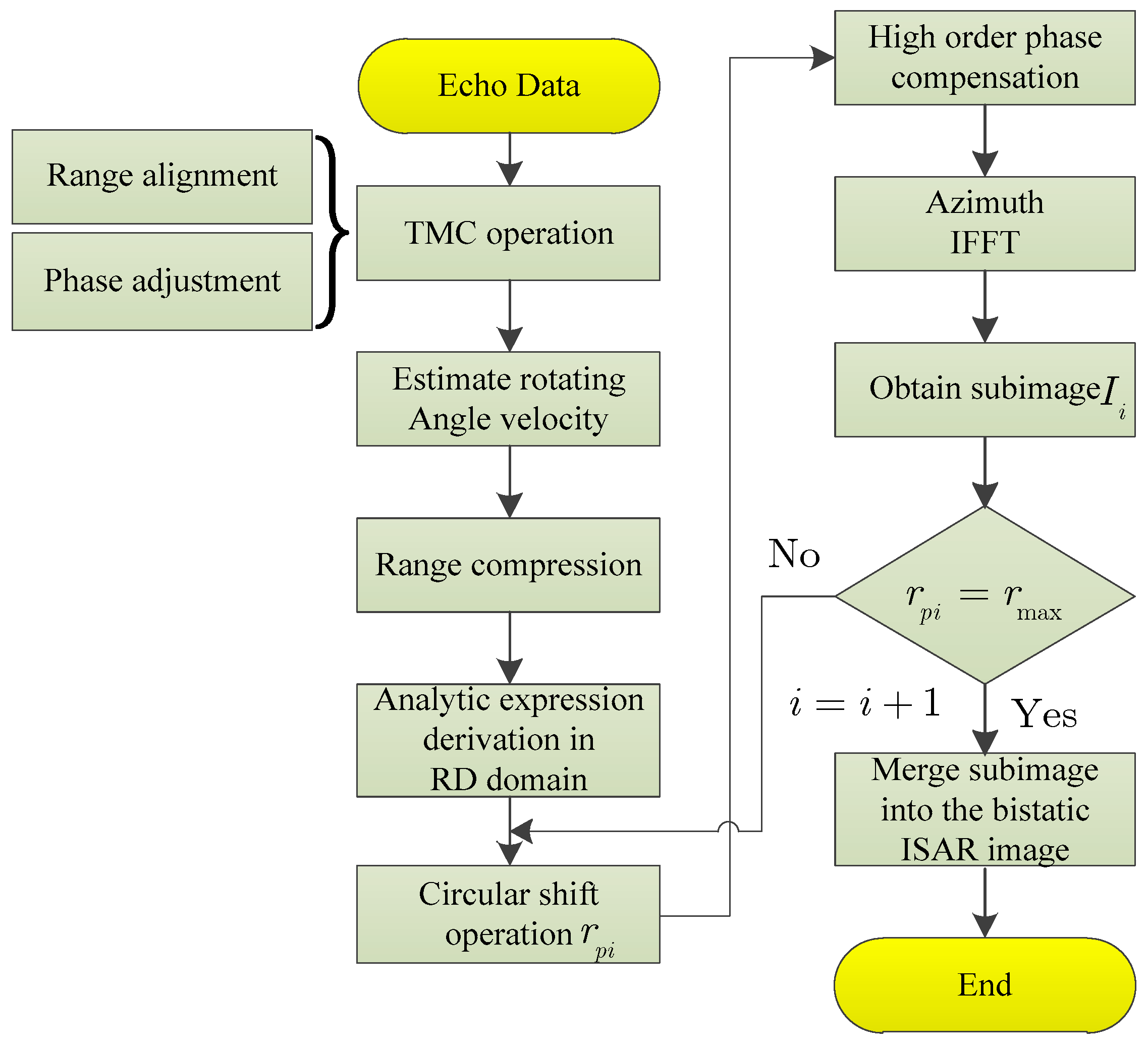
2.2. Proposed Imaging Method
- Step (1)
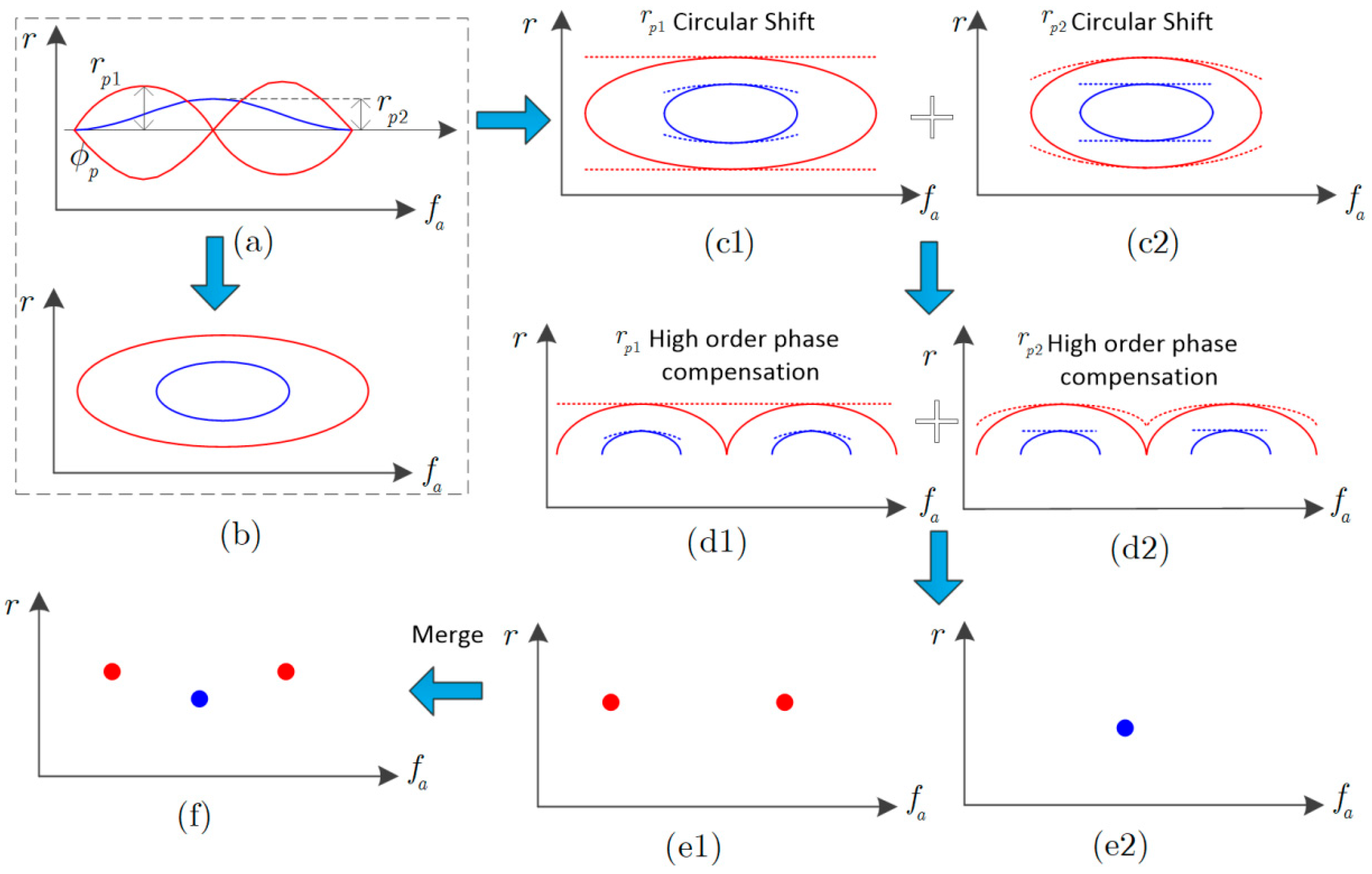
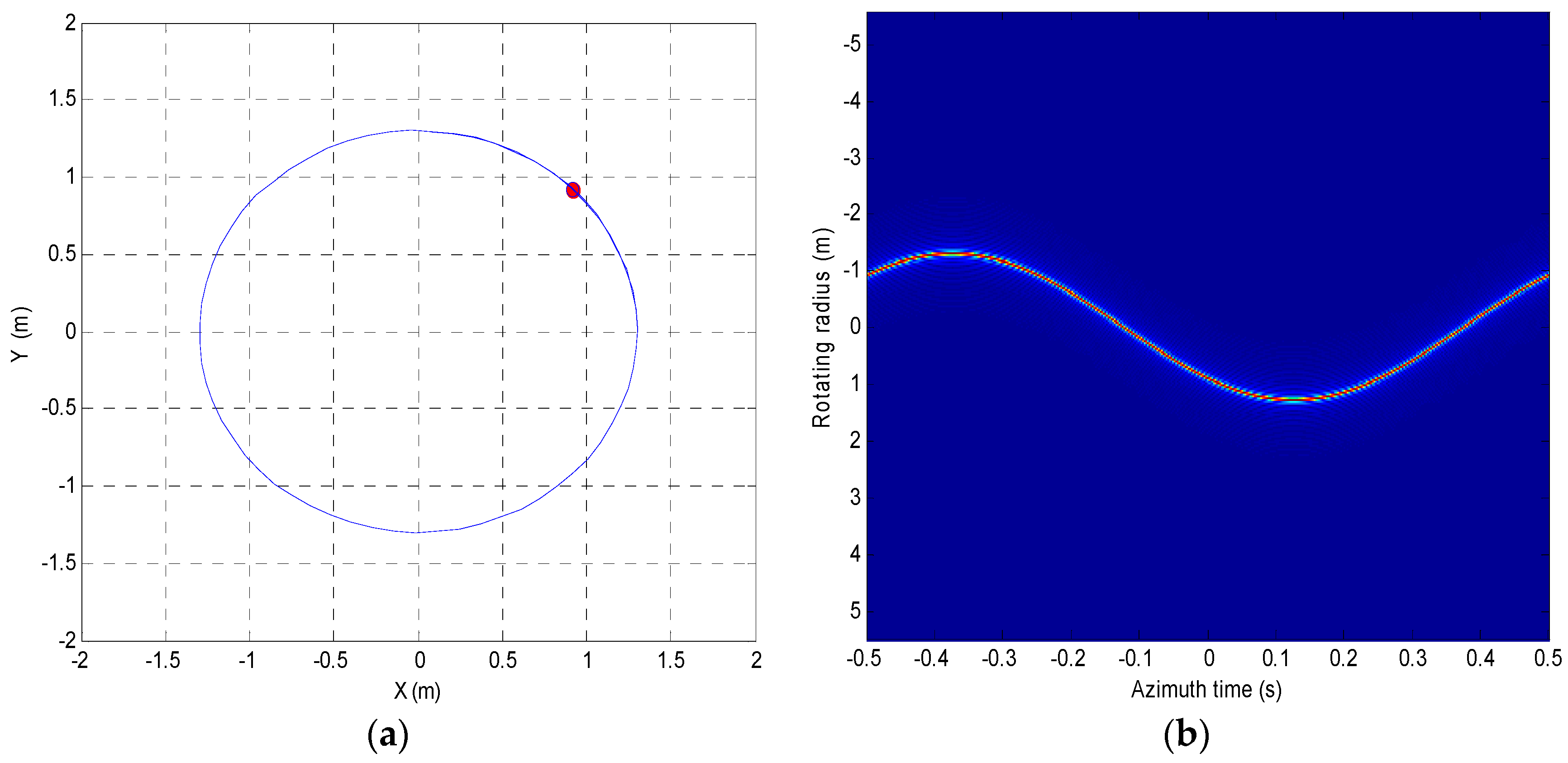
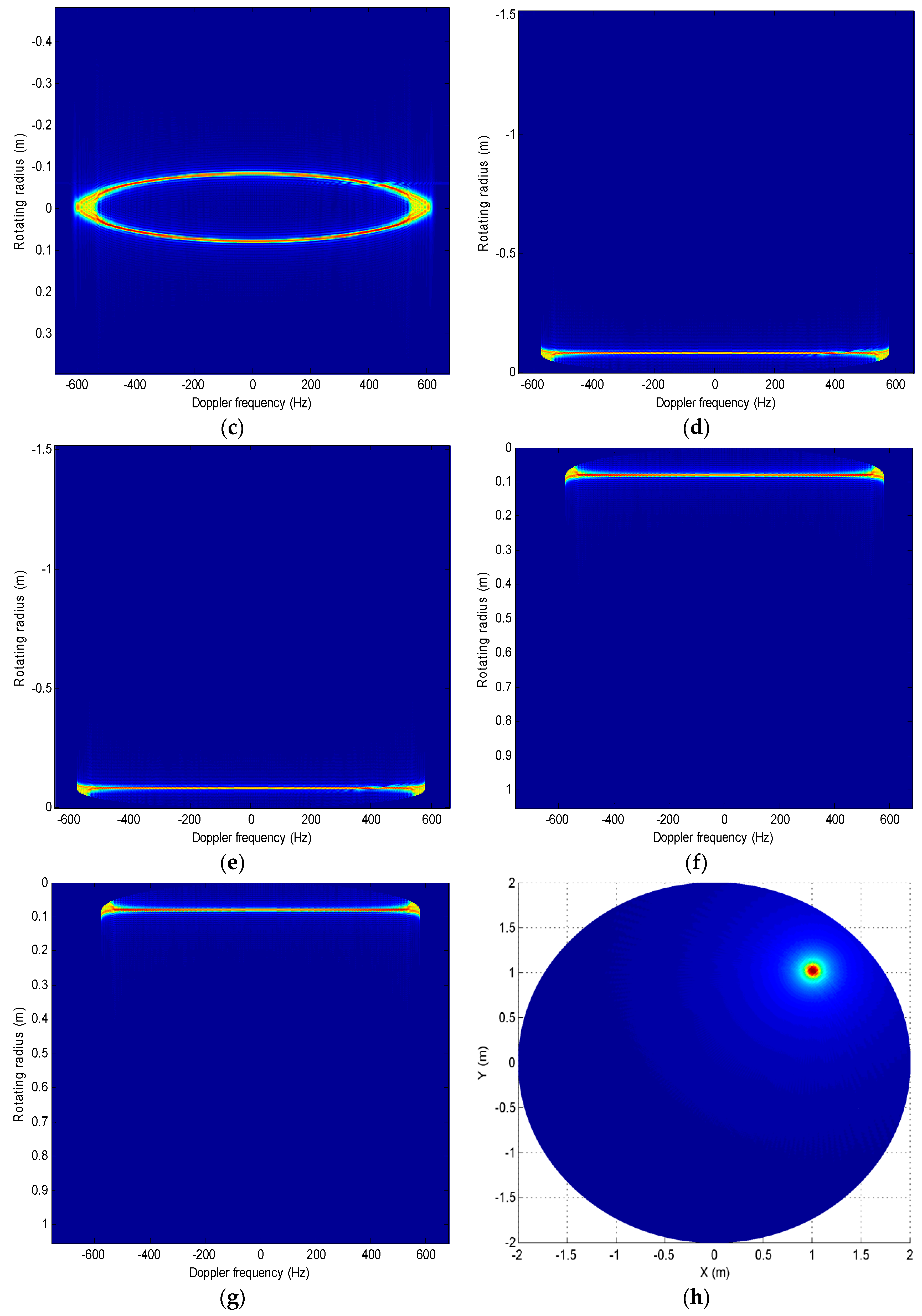
- Applying Equatioin (17) to calculate the energy of the scatterer with the rotating radius to concentrate the corresponding scatterer energy into one range unit. Meanwhile, the corresponding high order phase can be compensated, and the well-focused scatterers with rotating radius are produced via utilizing IFT in the azimuth dimension as a subimage , which is demonstrated from Figure 2c1 to Figure 2e1.
- Step (2)
- Step (3)
2.3. Computational Load Analysis
3. Simulation Results and Analysis
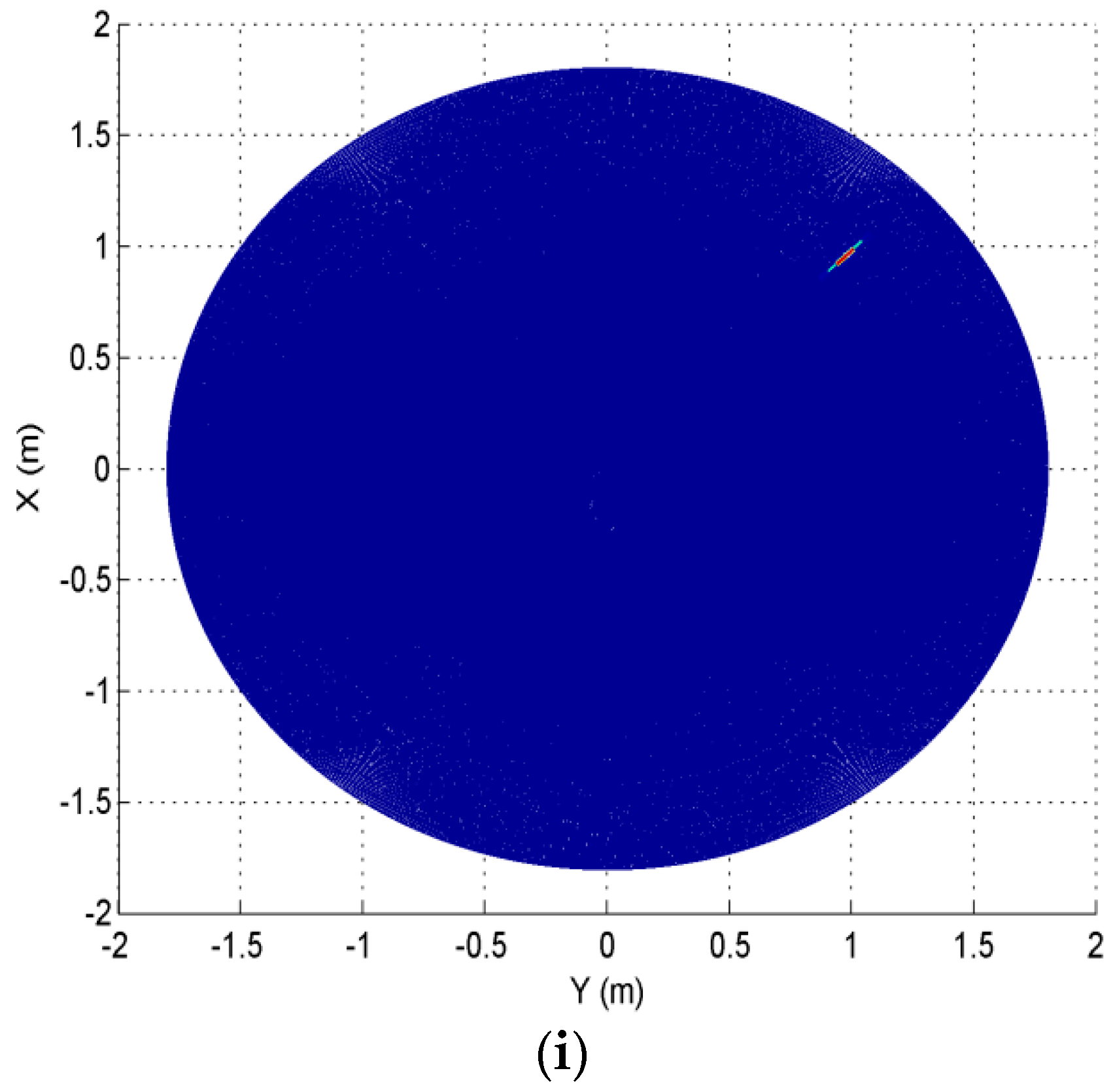
3.1. Bistatic ISAR Imaging for Single Scatterer
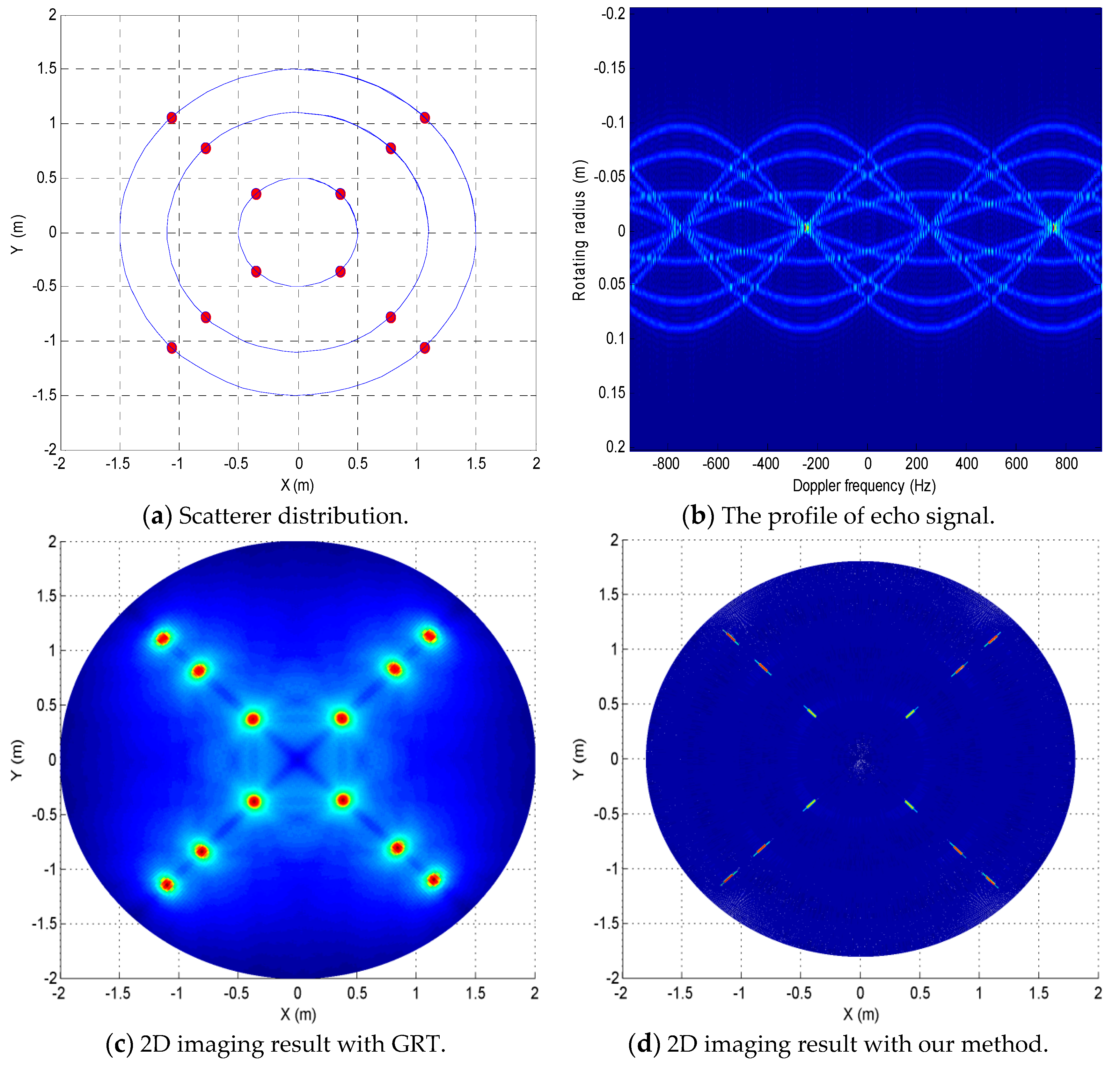
3.2. Imaging of Multiple Scatterers
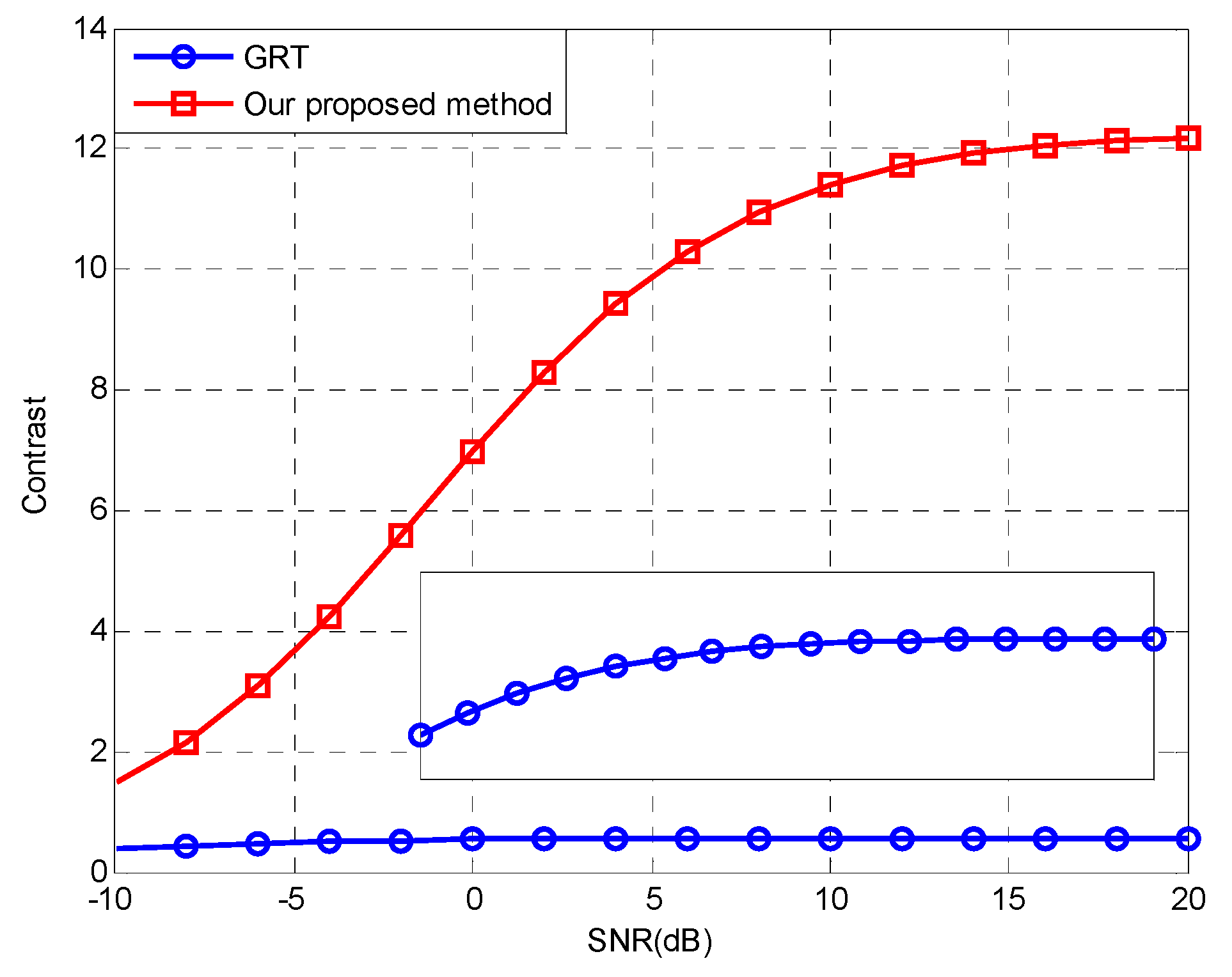
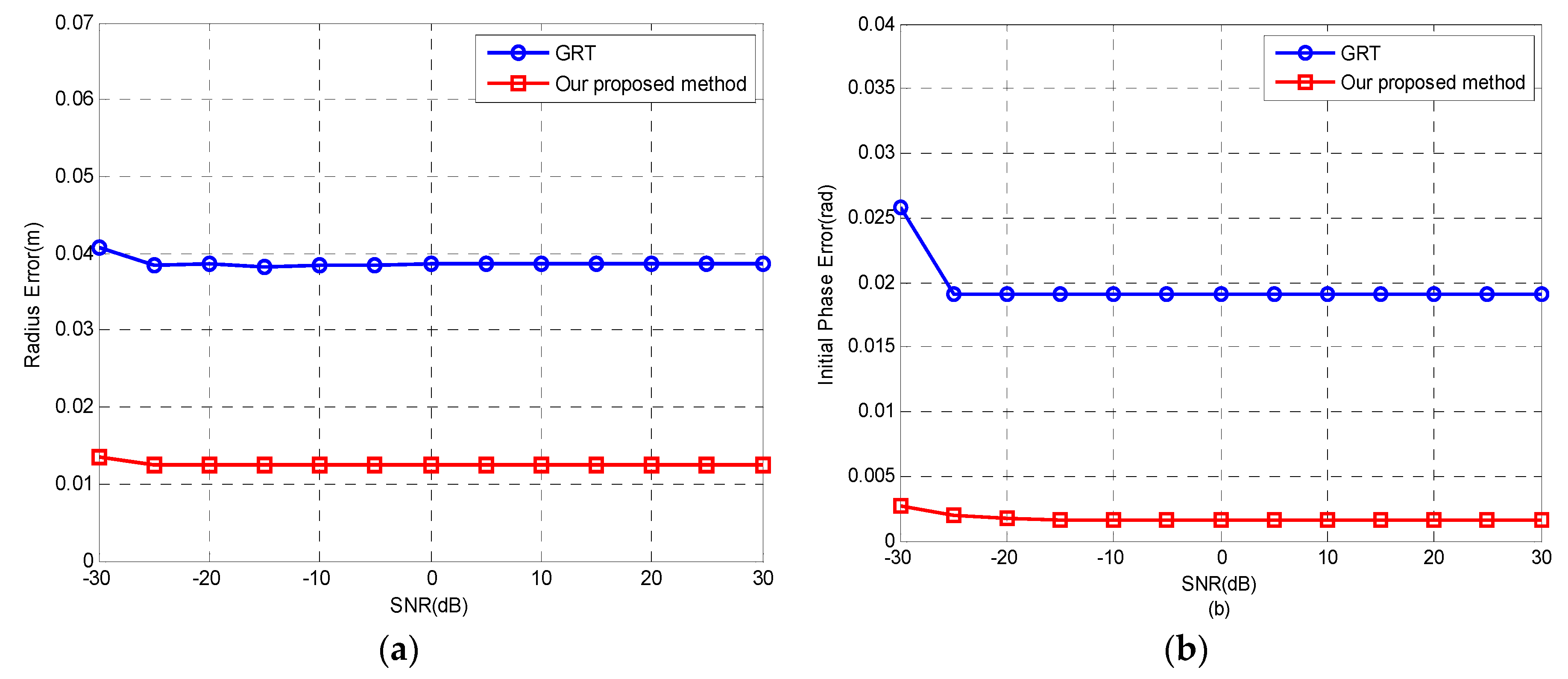
3.3. Estimation Error Analysis with Different SNRs
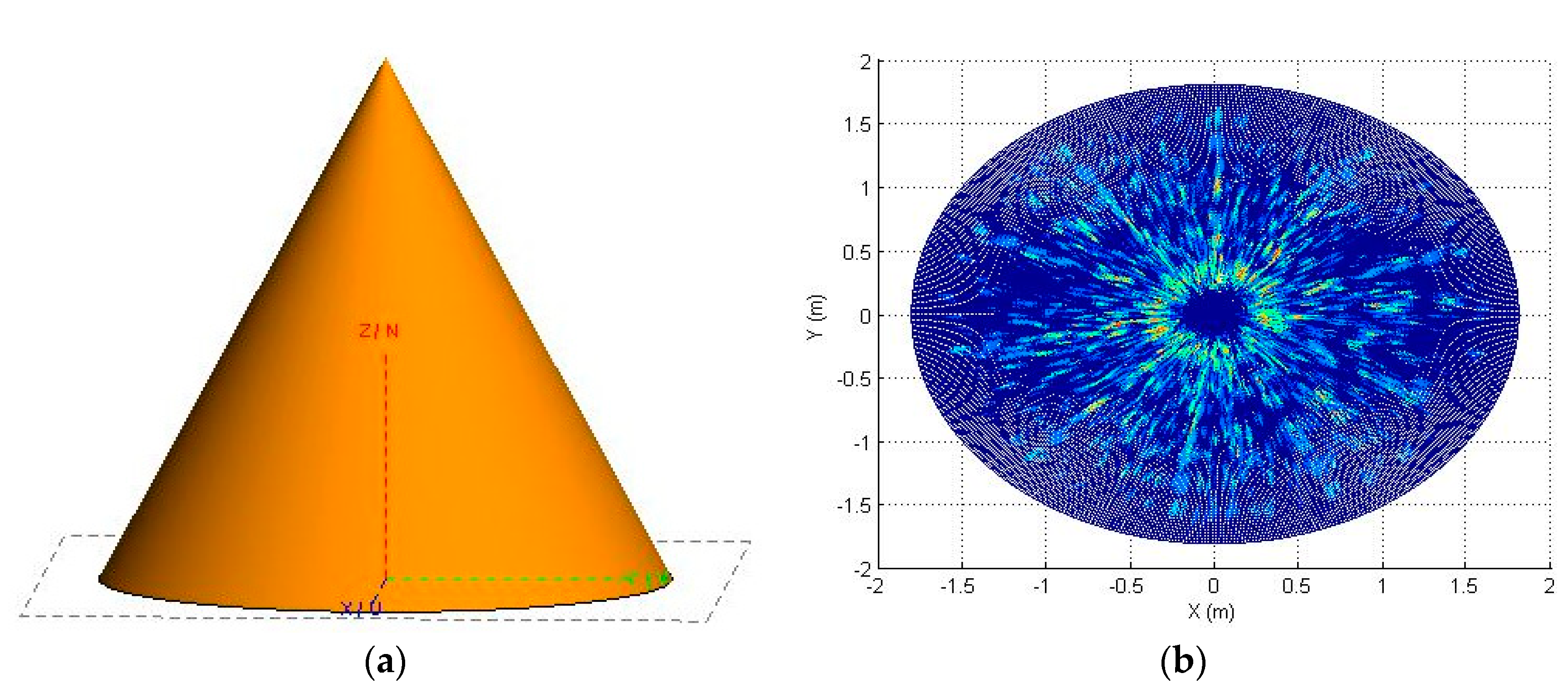
3.4. Electromagnetic Modeling Simulation
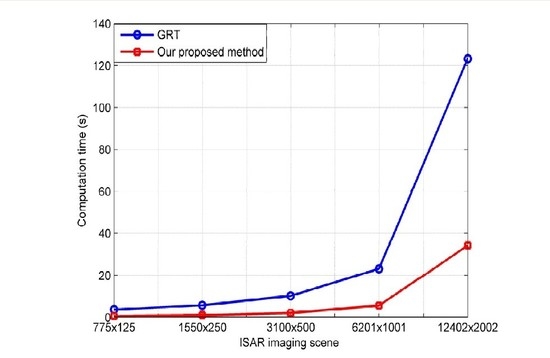
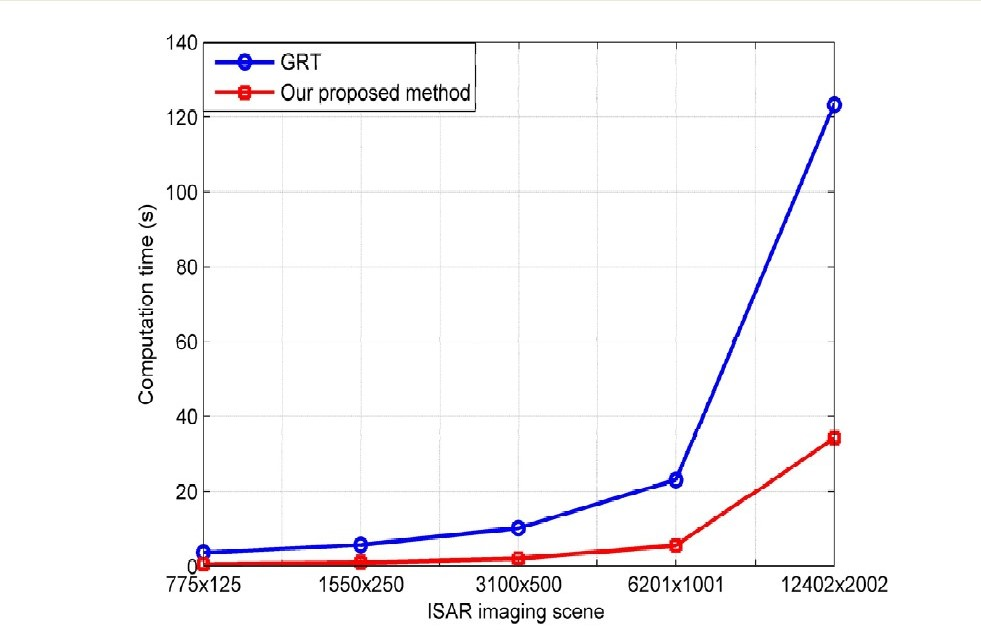
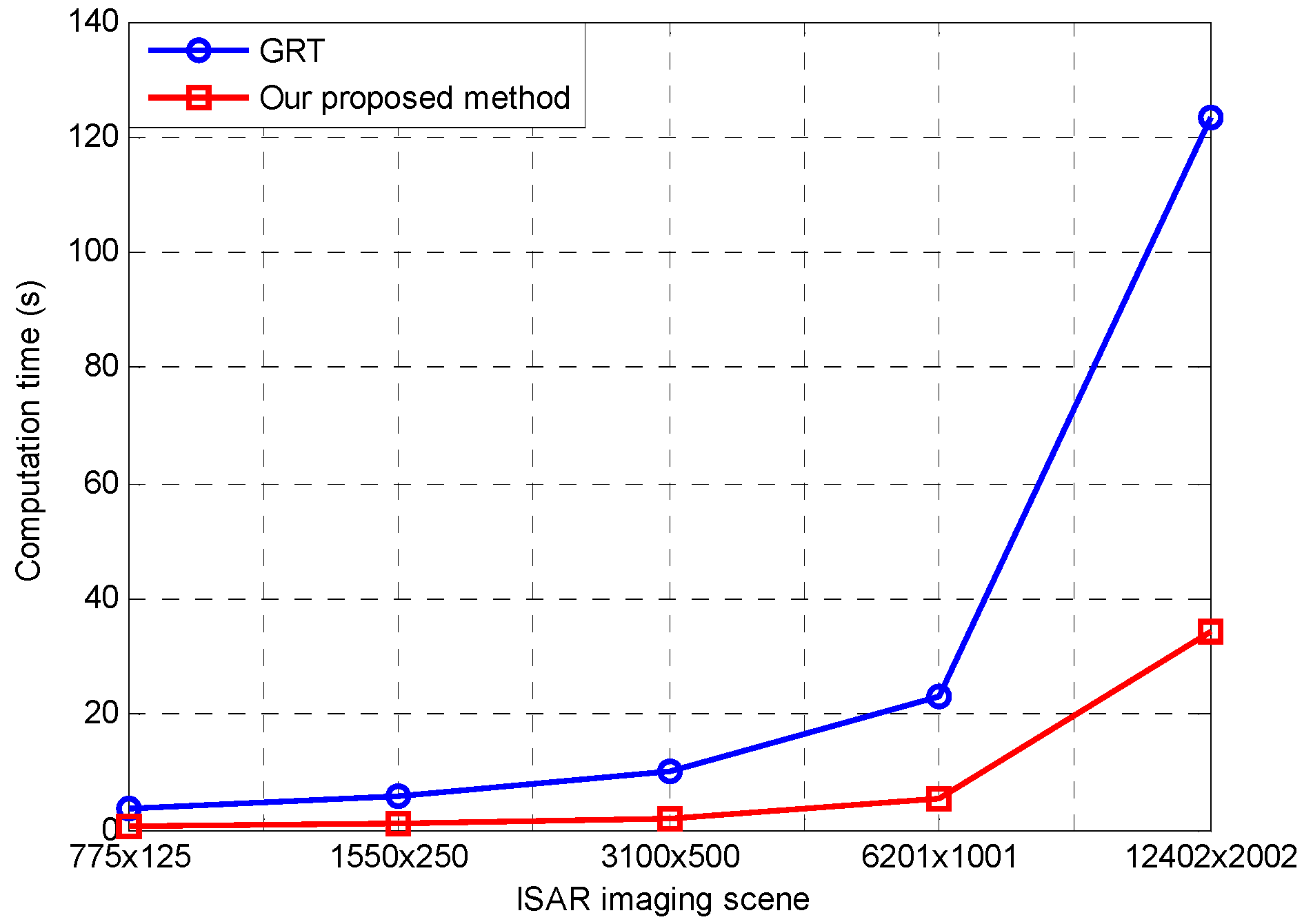
3.5. Comparison for Computational Load
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ruan, H.; Wu, Y.H.; Jia, X.; Ye, W. Novel ISAR imaging algorithm for maneuvering targets based on a modified keystone transform. IEEE Geosci. Remote Sens. Lett. 2014, 11, 128–132. [Google Scholar] [CrossRef]
- Li, D.; Gui, X.G.; Liu, H.Q.; Su, J.; Xiong, H. An ISAR imaging algorithm for maneuvering targets with low SNR based on parameter estimation of multi-component quadratic FM signals and nonuniform FFT. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 5688–5702. [Google Scholar] [CrossRef]
- Li, D.; Liu, H.Q.; Gui, X.G.; Zhang, X.Z. An efficient ISAR imaging method for maneuvering target based on synchrosqueezing transform. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1317–1320. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, L.; Yu, Y. Robust ISAR range alignment via minimizing the entropy of the average range profiles. IEEE Geosci. Remote Sens. Lett. 2009, 6, 204–208. [Google Scholar]
- Lv, X.; Xing, M.D.; Wan, C.R.; Zhang, S.H. ISAR imaging of maneuvering targets based on the range centroid Doppler technique. IEEE Trans. Image Process. 2009, 19, 141–153. [Google Scholar]
- Martorella, M.; Berizzi, F.; Haywood, B. Contrast maximization based technique for 2-D ISAR autofocusing. IEEE Proc. Radar Sonar Navig. 2005, 152, 253–262. [Google Scholar] [CrossRef]
- Chen, V.C.; Rosiers, A.D.; Lipps, R. Bistatic ISAR range-Doppler imaging and resolution analysis. In Proceedings of the 2009 IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009. [Google Scholar]
- Martorella, M.; Palmer, L.; Littleton, B.I.; Longstaff, D. On bistatic inverse synthetic aperture radar. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1125–1134. [Google Scholar] [CrossRef]
- Martorella, M. Analysis of the robustness of bistatic inverse synthetic aperture radar in the presence of phase synchronization errors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2673–2689. [Google Scholar] [CrossRef]
- Jiang, Y.C.; Sun, S.B.; Yeo, T.S.; Yuan, Y.S. Bistatic ISAR distortion and defocusing analysis. IEEE Trans. Aerosp. Electron. Syst. 2015, 53, 1168–1182. [Google Scholar] [CrossRef]
- Ma, C.Z.; Yeo, T.S.; Guo, Q.; Wei, P.J. Bistatic ISAR imaging incorporating interferometric 3-D imaging technique. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3859–3867. [Google Scholar] [CrossRef]
- Dong, J.; Gao, M.Q.; Shang, C.X.; Fu, X.Q.; Li, L. Research on image plane of bistatic ISAR. In Proceedings of the IET International Radar Conference, Guilin, China, 20–22 April 2009. [Google Scholar]
- Shang, C.X.; Han, N.; Dong, J.; Zhang, D.W. Bistatic ISAR image revising method for cooperative targets. Telecommun. Eng. 2012, 52, 38–42. (In Chinese) [Google Scholar]
- Kang, B.S.; Bae, M.S.; Kang, M.S.; Kim, K.T. Bistatic-ISAR distortion correction and range and corss-range scaling. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1962–1973. [Google Scholar] [CrossRef]
- Sun, S.B.; Yuan, Y.S.; Jiang, Y.C. Bistatic inverse synthetic aperture radar imaging method for maneuvering targets. J. Appl. Remote Sens. 2016, 10, 045016. [Google Scholar]
- Johnson, D.G.; Brooker, G.M. Development of a Near-Field Bistatic Synthetic Aperture Radar for Complex Target Reconstruction. Int. J. Antennas Propag. 2012, 4, 624–627. [Google Scholar] [CrossRef][Green Version]
- Li, N.; Wang, R.; Deng, Y.; Yu, W.; Zhang, Z.; Liu, Y. Autofocus correction of residual RCM for VHR SAR sensors with light-small aircraft. IEEE Trans. Geosci. Remote Sens. 2017, 55, 441–452. [Google Scholar] [CrossRef]
- Munoz-Ferreras, J.M.; Perez-Martinez, F. Uniform rotational motion compensation for inverse synthetic aperture radar with non-cooperative targets. IET Radar Sonar Navig. 2008, 2, 25–34. [Google Scholar] [CrossRef]
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.G.; Ma, J.; Zheng, J. Ground maneuvering target imaging and high-order motion parameter estimation based on second-order keystone and generalized hough-HAF transform. IEEE Trans. Geosci. Remote Sens. 2017, 55, 320–335. [Google Scholar] [CrossRef]
- Kirkland, D. Imaging moving targets using the second-order keystone transform. IET Radar Sonar Navig. 2011, 5, 902–910. [Google Scholar] [CrossRef]
- Femmam, S.; M’Sirdi, N.K.; Ouahabi, A. Perception and characterization of materials using signal processing techniques. IEEE Trans. Instrum. Meas. 2001, 50, 1203–1211. [Google Scholar] [CrossRef]
- Antoine, J.P. Wavelet analysis of signals and images, a grand tour. Rev. Cienc. Mater. 2000, 18, 113–143. [Google Scholar]
- Chen, V.C. Doppler signatures of radar backscattering from objects with micro-motions. IET Signal Process. 2008, 2, 291–300. [Google Scholar] [CrossRef]
- Gao, H.W.; Xie, L.G.; Wen, S.L.; Kuang, Y. Research on radar target identification of warhead and decoys based on micro-Doppler signature. Chin. J. Radio Sci. 2008, 23, 775–780. [Google Scholar]
- He, S.S.; Zhou, J.X.; Zhao, H.Z.; Le, D.B. Estimating the precession angle of ballistic targets in midcourse based on HRRP sequence. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Ayhan, B.; Kwan, C.; Lu, C. Extracting gait characteristics from micro-Doppler features. In Proceedings of the 2018 2nd international Conference on Vision, Image and Signal Processing, Las Vegas, NV, USA, 27–29 August 2018; pp. 1–6. [Google Scholar]
- Li, D.; Zhan, M.Y.; Liu, H.Q.; Liao, G.S.; Fang, Z.P. A robust translational motion compensation method for ISAR imaging based on Keystone transform and fractional Fourier transform under low SNR environment. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2140–2156. [Google Scholar] [CrossRef]
- Liu, L.; Zhou, F.; Tao, M.L.; Sun, P.; Zhang, Z.J. Adaptive translational motion compensation method for ISAR imaging under low SNR based on particle swarm optimization. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 5146–5157. [Google Scholar] [CrossRef]
- Hansen, K.V.; Toft, P.A. Fast curve estimation using preconditioned generalized radon transform. IEEE Trans. Image Process. 1996, 5, 1651–1661. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Quan, Y.; Xing, M.D.; Zhang, S. Single-range image fusion for spinning space debris radar imaging. IEEE Geosci. Remote Sens. Lett. 2010, 7, 626–630. [Google Scholar] [CrossRef]
- Zhang, Q.; Yeo, T.S.; Tan, H.S.; Ying, L. Imaging of a Moving Target With Rotating Parts Based on the Hough Transform. IEEE Trans. Geosci. Remote Sens. 2008, 46, 291–299. [Google Scholar] [CrossRef]
- Li, D.; Lin, H.; Liu, H.Q.; Liao, G.S. Focus Improvement for High-Resolution Highly Squinted SAR Imaging Based on 2-D Spatial-Variant Linear and Quadratic RCMs Correction and Azimuth-Dependent Doppler Equalization. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 10, 168–183. [Google Scholar] [CrossRef]
- Bai, X.R.; Zhou, F.; Xing, M.D.; Bao, Z. Scaling the 3-D Image of Spinning Space Debris via Bistatic Inverse Synthetic Aperture Radar. IEEE Geosci. Remote Sens. Lett. 2010, 7, 430–434. [Google Scholar] [CrossRef]
- Nair, M.S.; Lakshmanan, R.; Wilscy, M.; Tatavarti, R. Fuzzy logic-based automatic contrast enhancement of satellite images of ocean. Signal Image Video Process. 2011, 5, 69–80. [Google Scholar] [CrossRef]
- Kouyoumjian, R.G. Asymptotic high-frequency methods. Proc. IEEE 2005, 53, 864–876. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Carrier frequency | 11 GHz |
| Frequency bandwidth | 1.5 GHz |
| Pulse width | 1 us |
| PRF | 2000 Hz |
| Position of Tx | [0, 13.05 km] |
| Position of Rx | [0, −13.05 km] |
| Baseline of Tx and Rx | 26.1 km |
| Target imaging center | [99.14 km, 0] |
| Rotating angle velocity | 6.28 rad/s |
| Bistatic angle | pi/12 |
| (0.5, −2.3562) | (0.5, −0.7854) | (0.5, 0.7854) | (0.5, 2.3562) |
| (1.1, −2.3562) | (1.1, −0.7854) | (1.1, 0.7854) | (1.1, 2.3562) |
| (1.5, −2.3562) | (1.5, −0.7854) | (1.5, 0.7854) | (1.5, 2.3562) |
| GRT | Our Proposed Method | GRT | Our Proposed Method |
|---|---|---|---|
| (0.5293, −2.3752) | (0.5119, −2.366) | (0.5287, −0.8044) | (0.5284, −0.7948) |
| (0.0293, 0.019) | (0.0119, 0.0098) | (0.0287, 0.019) | (0.0284, 0.0094) |
| (0.53, 0.7664) | (0.5284, 0.776) | (0.5313, 2.3371) | (0.5284, 2.347) |
| (0.03, 0.019) | (0.0284, 0.0094) | (0.0313, 0.0191) | (0.0284, 0.0092) |
| (1.1653, −2.3752) | (1.106, −2.366) | (1.162, −0.8044) | (1.106, −0.7948) |
| (0.0653, 0.019) | (0.006, 0.0098) | (0.062, 0.019) | (0.006, 0.0094) |
| (1.162, 0.7664) | (1.106, 0.776) | (1.164, 2.3371) | (1.106, 2.347) |
| (0.062, 0.019) | (0.006, 0.0094) | (0.064, 0.0191) | (0.006, 0.0092) |
| (1.5867, −2.3752) | (1.503, −2.366) | (1.586, −0.8044) | (1.503, −0.7948) |
| (0.0867, 0.019) | (0.003, 0.0098) | (0.086, 0.019) | (0.003, 0.0094) |
| (1.5847, 0.7664) | (1.503, 0.776) | (1.5847, 2.3371) | (1.503, 2.347) |
| (0.0847, 0.019) | (0.003, 0.094) | (0.0847, 0.0191) | (0.003, 0.0094) |
| Start frequency | 6.5 GHz | Carrier frequency | 7 GHz |
| End frequency | 7.5 GHz | Number of pulses | 2001 |
| Number of frequency | 6200 | Base radius | 3 m |
| Pitch angle | 60° | Height | 1.5 m |
| Bistatic angle | Pi/4 | Rotating velocity | 6.28 rad/s |
| Pulse Width | 1 us | PRF | 2000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Li, D.; Tan, X.; Liu, H.; Liao, G. A Fast Bistatic ISAR Imaging Approach for Rapidly Spinning Targets via Exploiting SAR Technique. Remote Sens. 2020, 12, 2077. https://doi.org/10.3390/rs12132077
Yang Z, Li D, Tan X, Liu H, Liao G. A Fast Bistatic ISAR Imaging Approach for Rapidly Spinning Targets via Exploiting SAR Technique. Remote Sensing. 2020; 12(13):2077. https://doi.org/10.3390/rs12132077
Chicago/Turabian StyleYang, Zhijun, Dong Li, Xiaoheng Tan, Hongqing Liu, and Guisheng Liao. 2020. "A Fast Bistatic ISAR Imaging Approach for Rapidly Spinning Targets via Exploiting SAR Technique" Remote Sensing 12, no. 13: 2077. https://doi.org/10.3390/rs12132077
APA StyleYang, Z., Li, D., Tan, X., Liu, H., & Liao, G. (2020). A Fast Bistatic ISAR Imaging Approach for Rapidly Spinning Targets via Exploiting SAR Technique. Remote Sensing, 12(13), 2077. https://doi.org/10.3390/rs12132077