Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements


 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Sites
2.2. In Situ Measurements
2.3. Uncertainty Budget
2.4. Atmospheric Correction Processors for OLCI Data
2.5. Data Analysis
3. Results
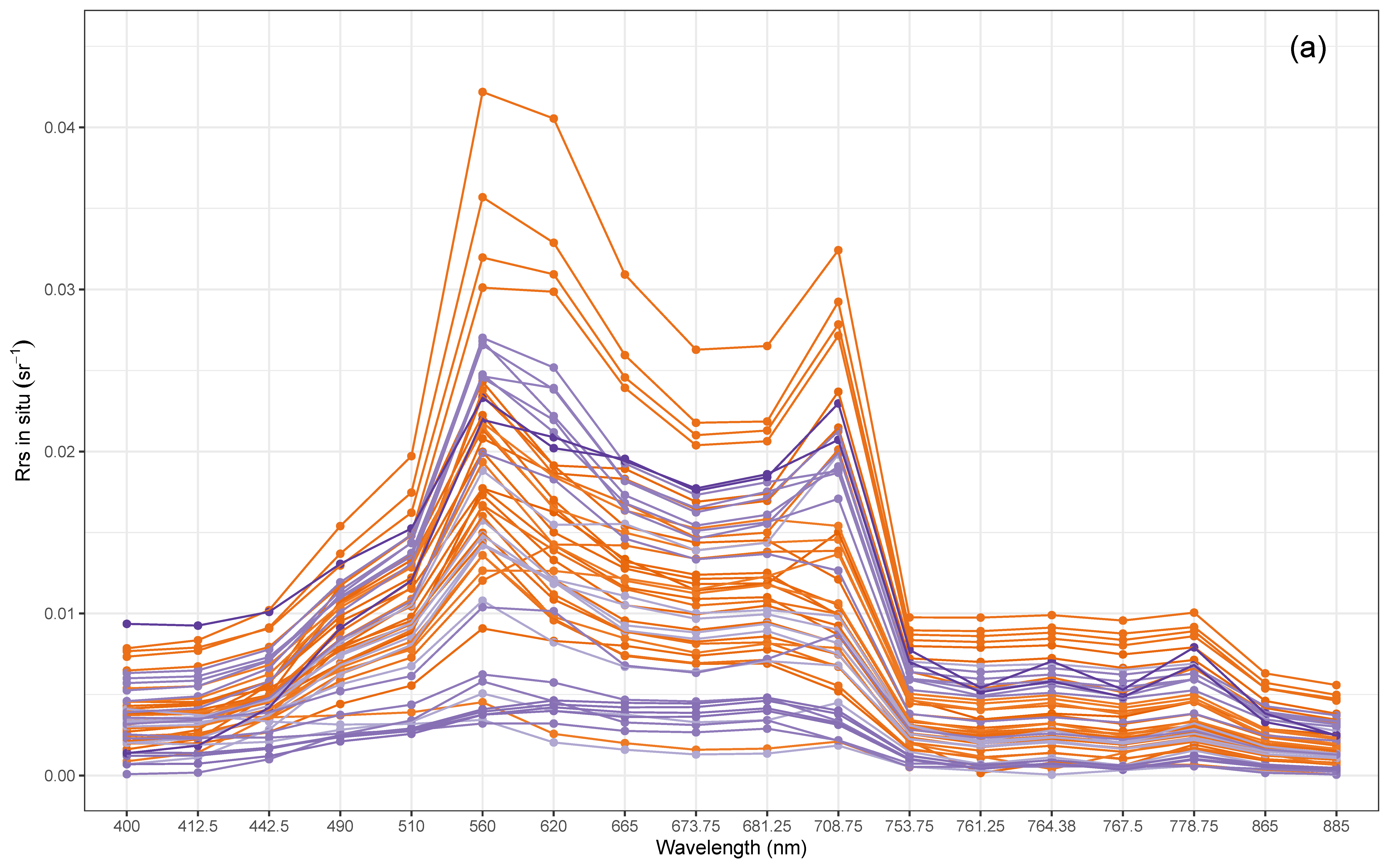
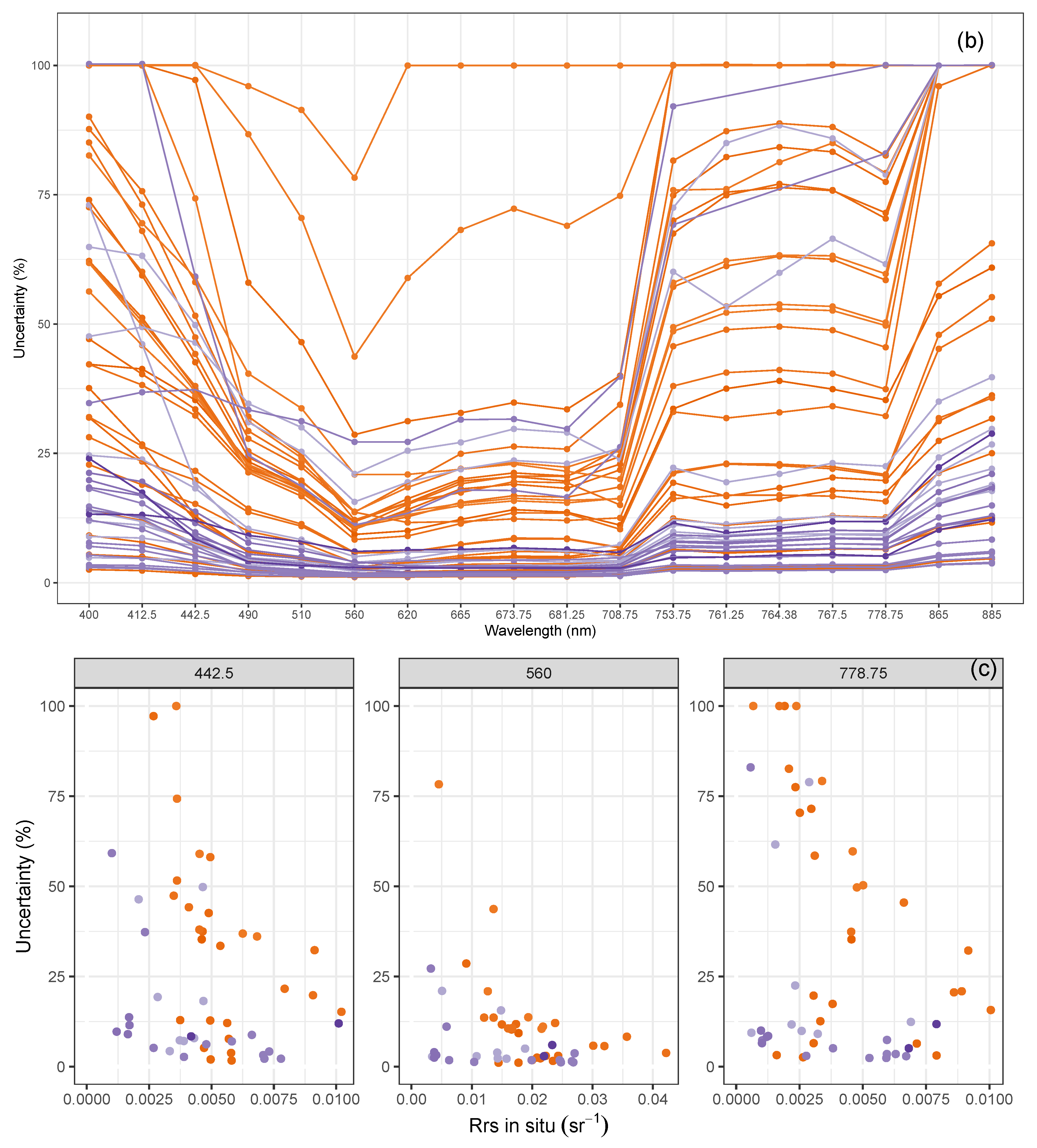
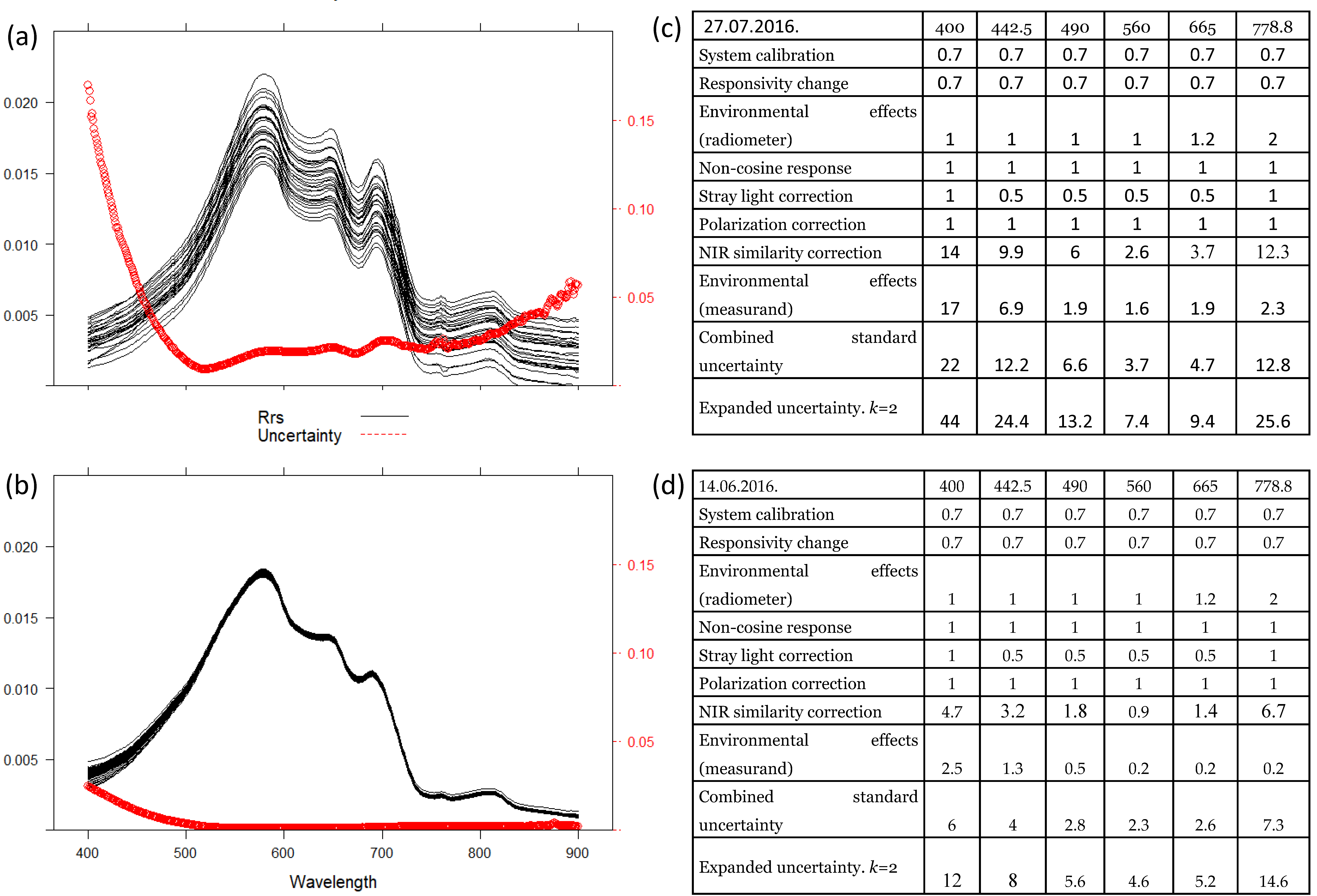
3.1. In Situ Dataset in Terms of Associated Uncertainties
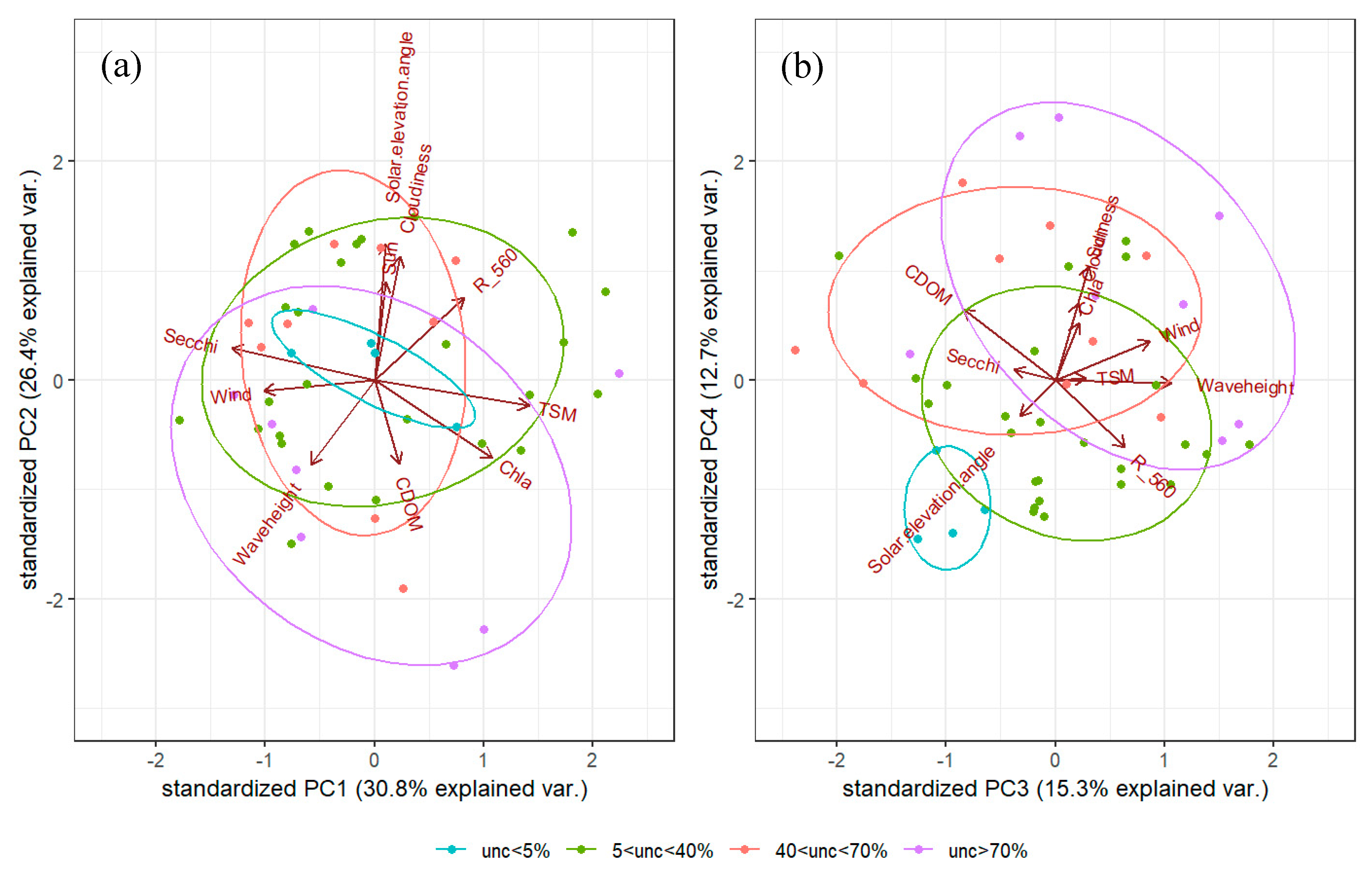
3.2. PCA
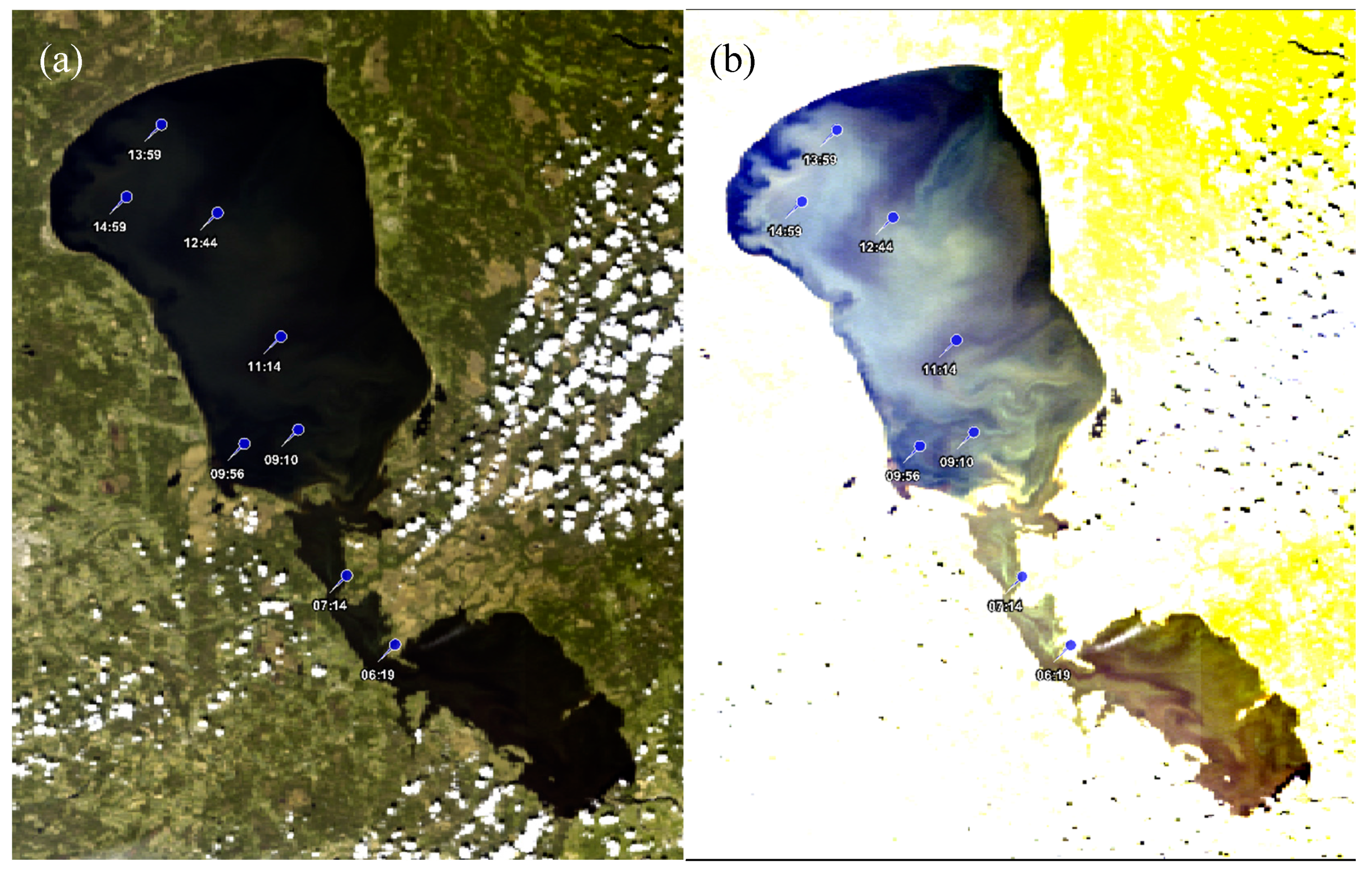
3.3. Spatial and Temporal Effects on Combining Satellite and In Situ Data
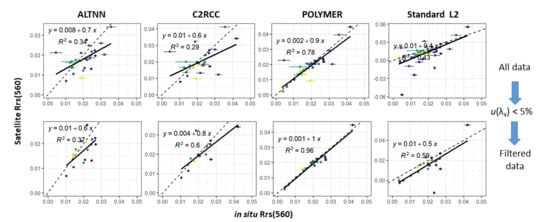
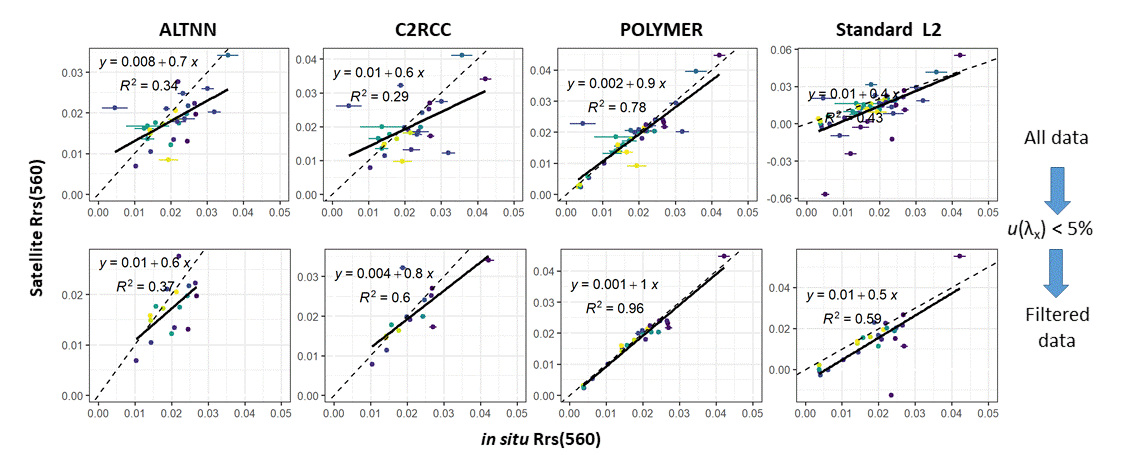
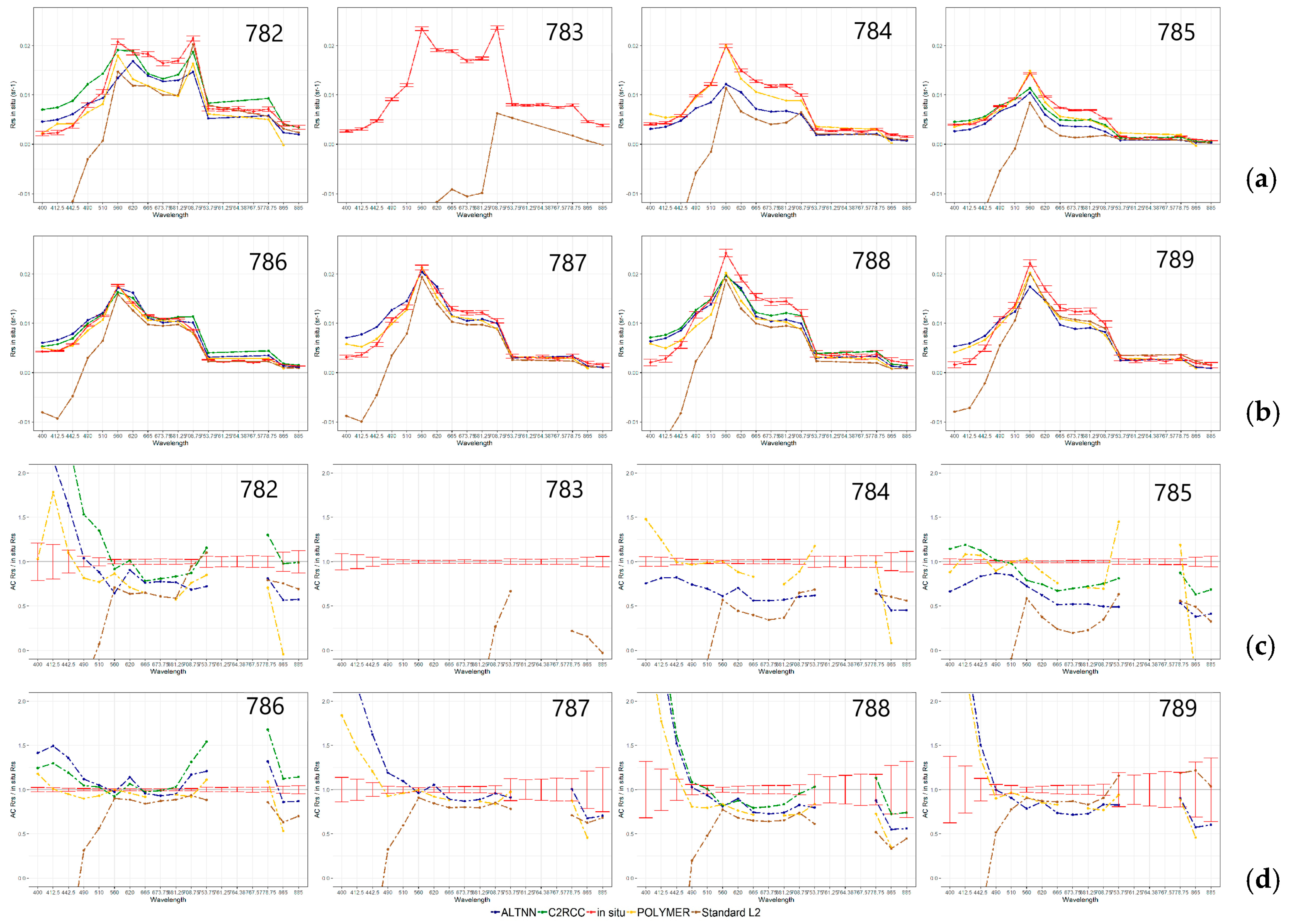
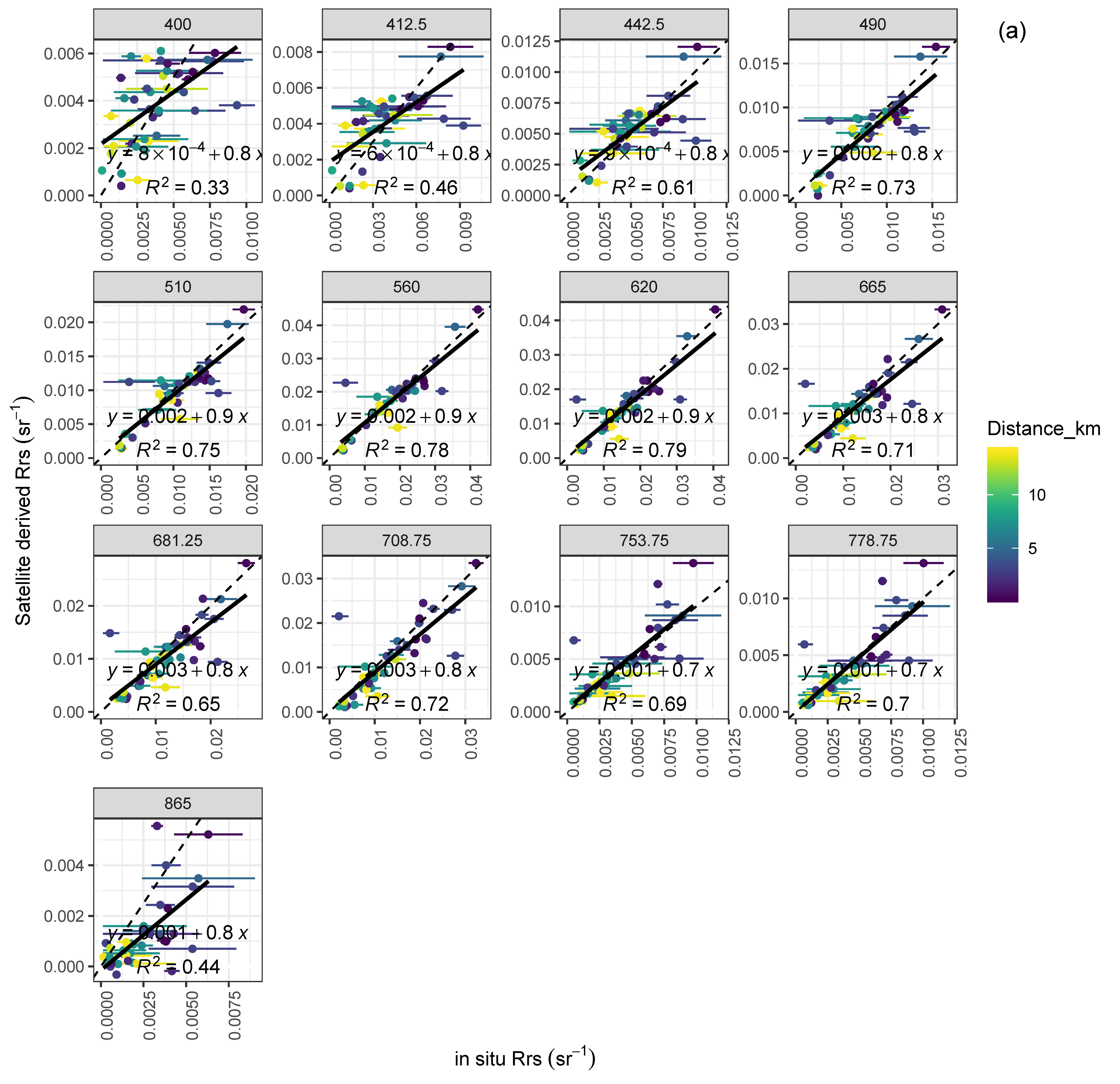
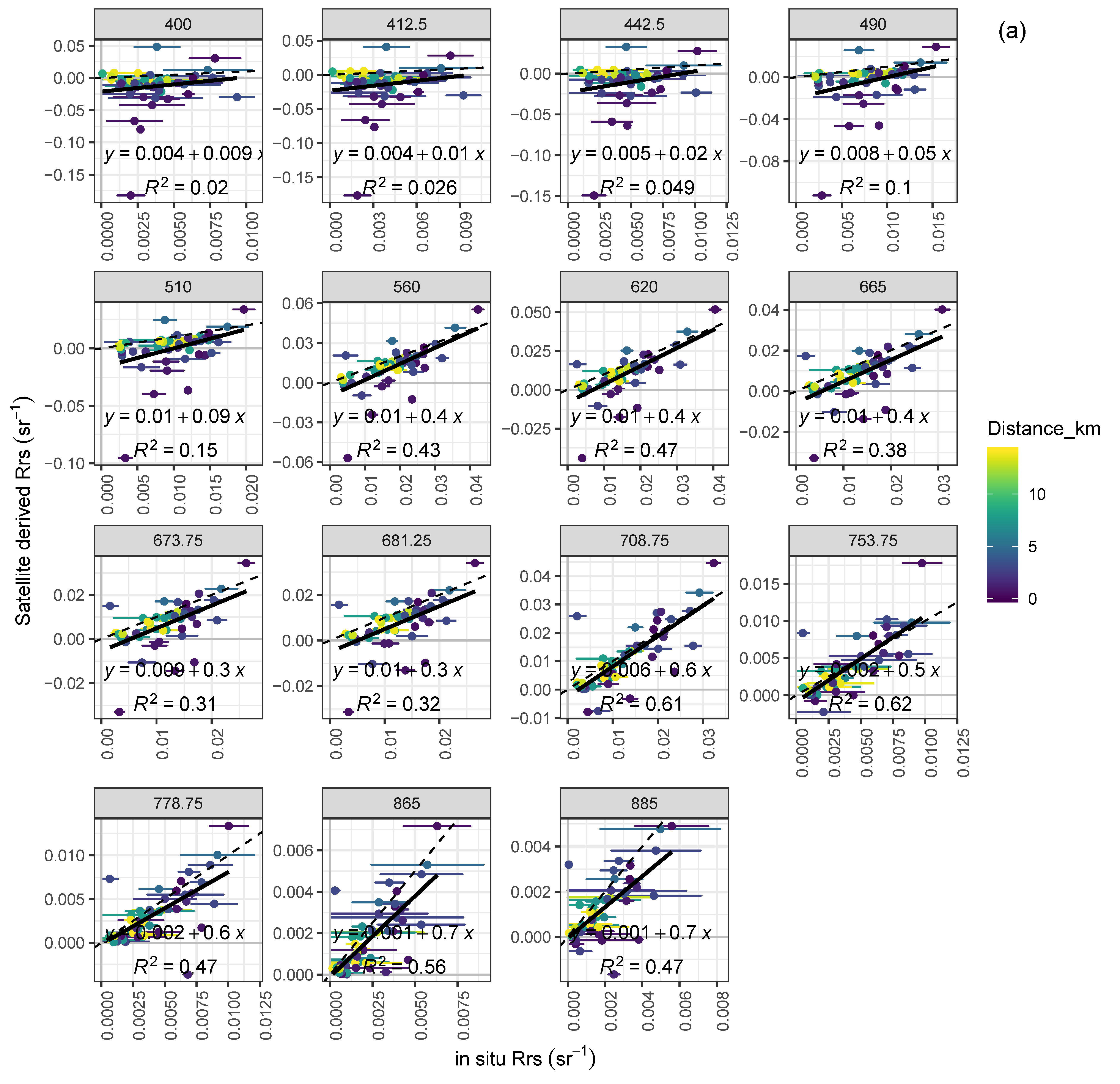
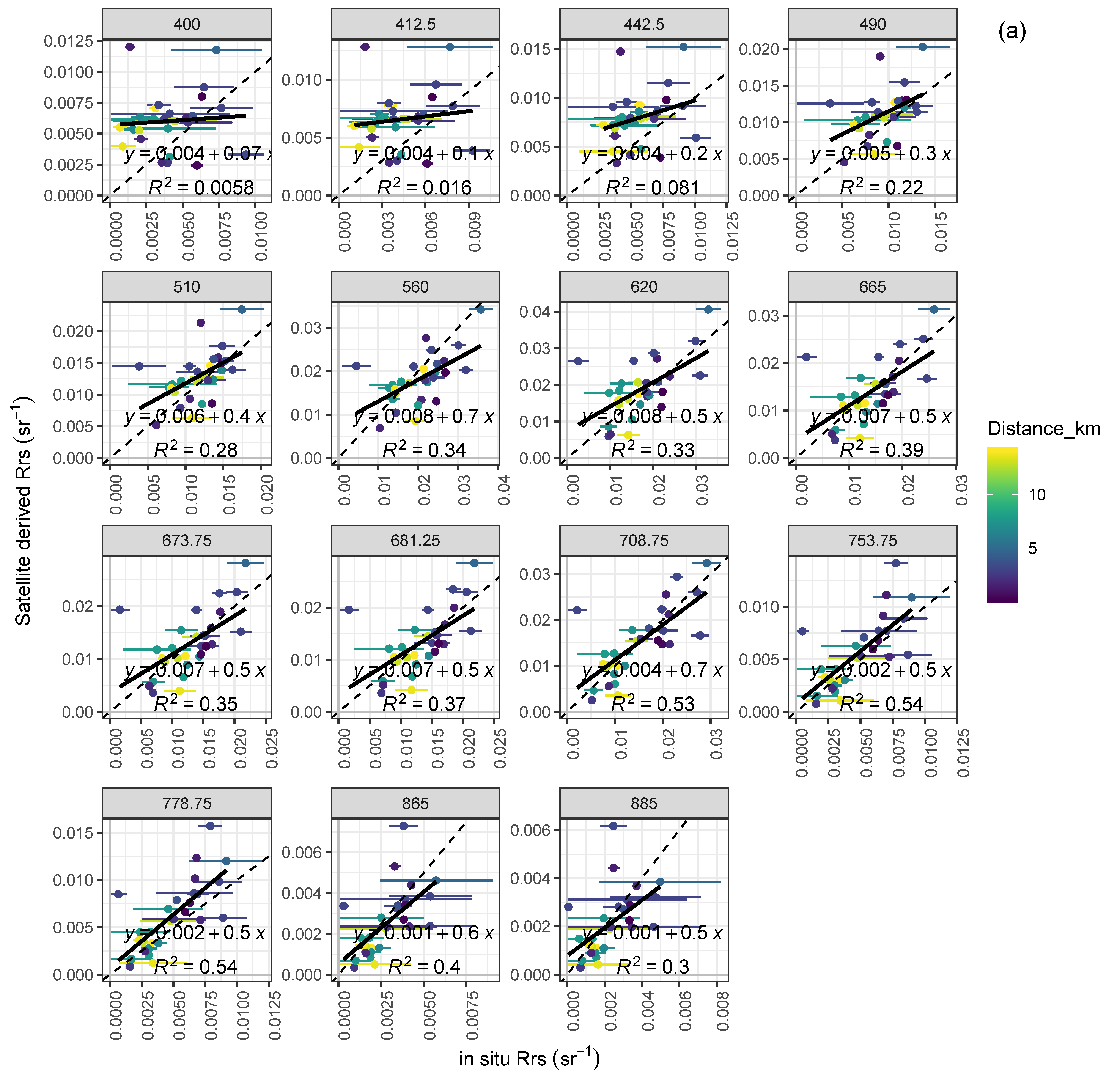
3.4. Validation of AC Processors on All Match-Ups
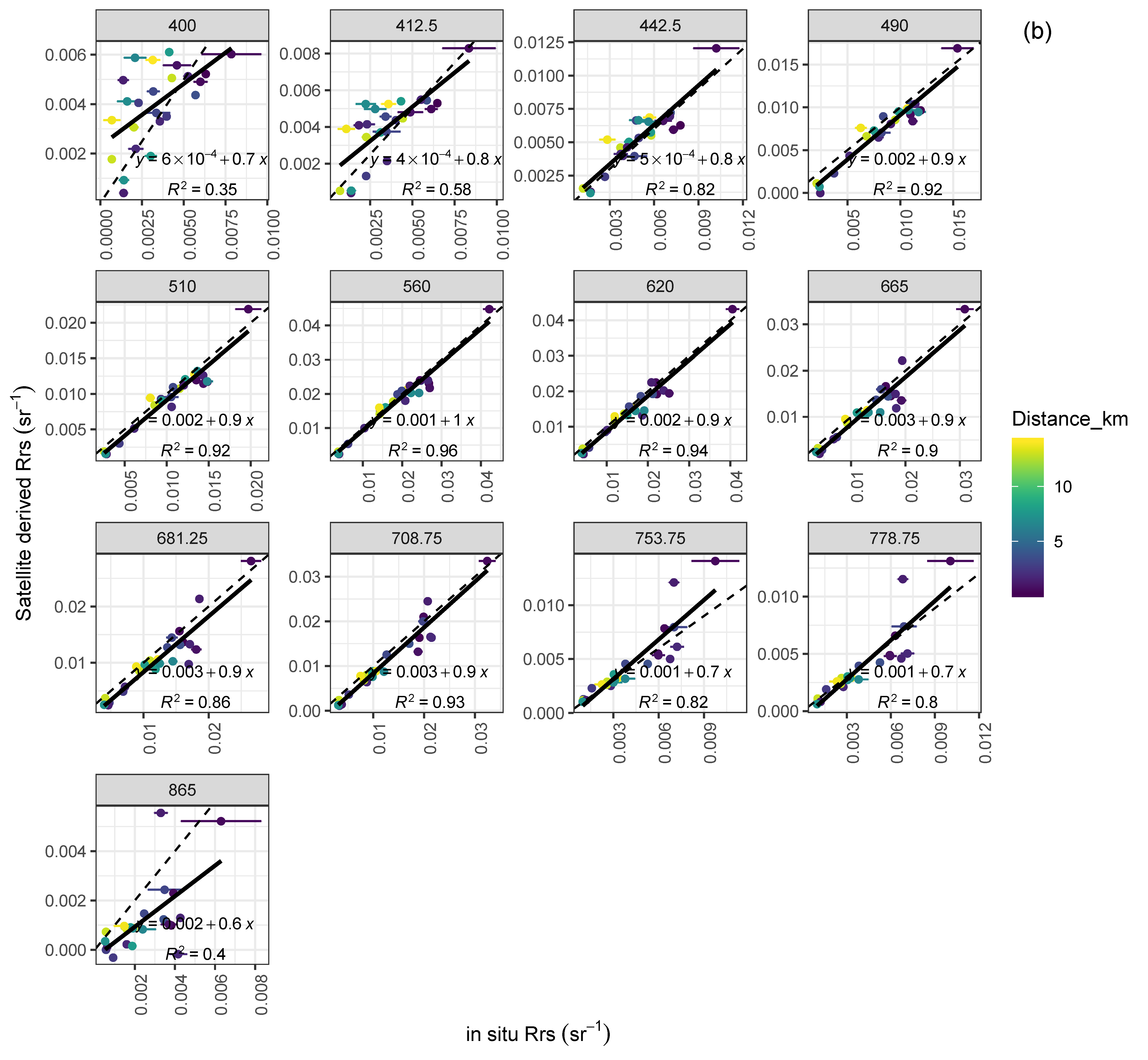
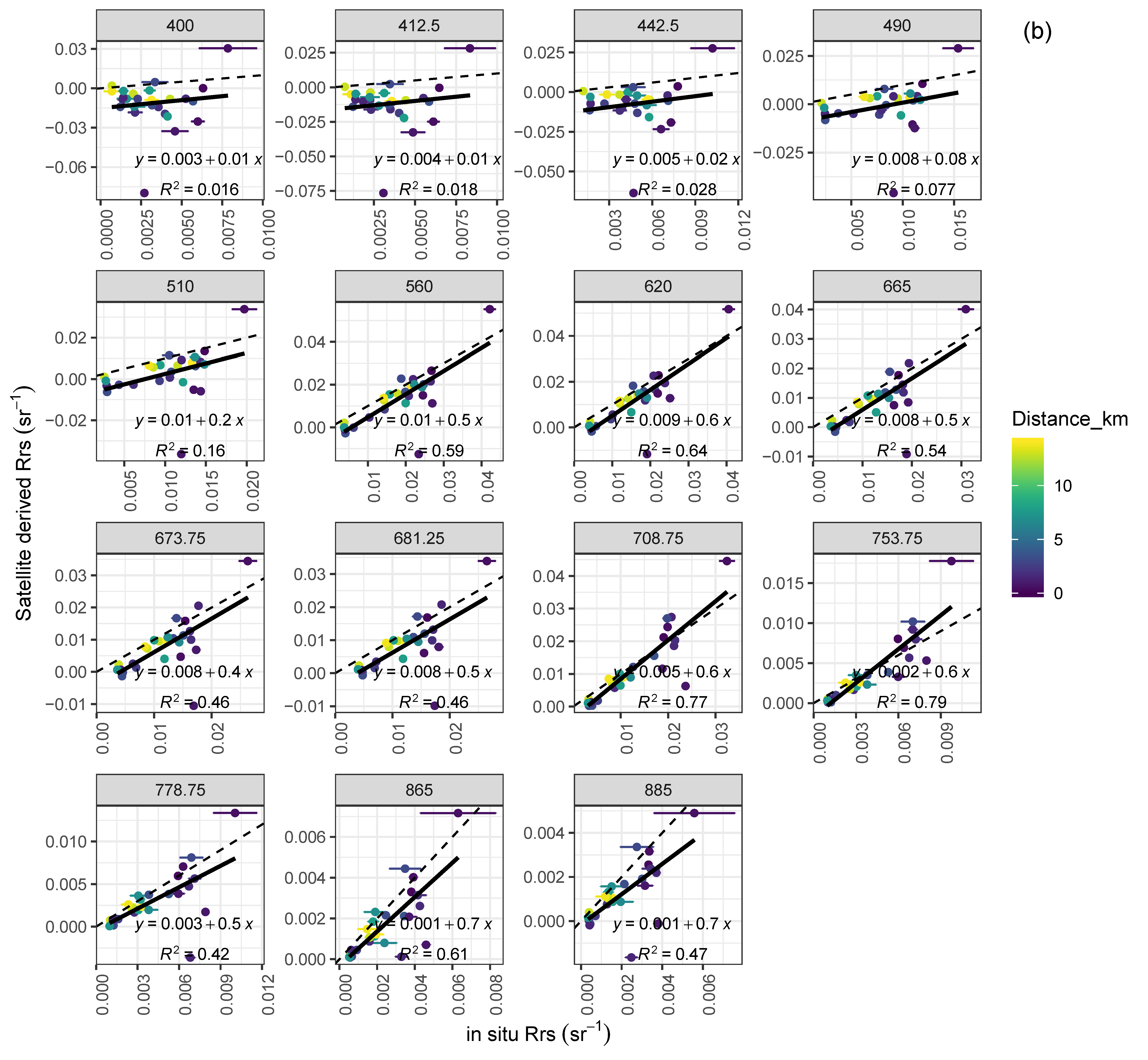
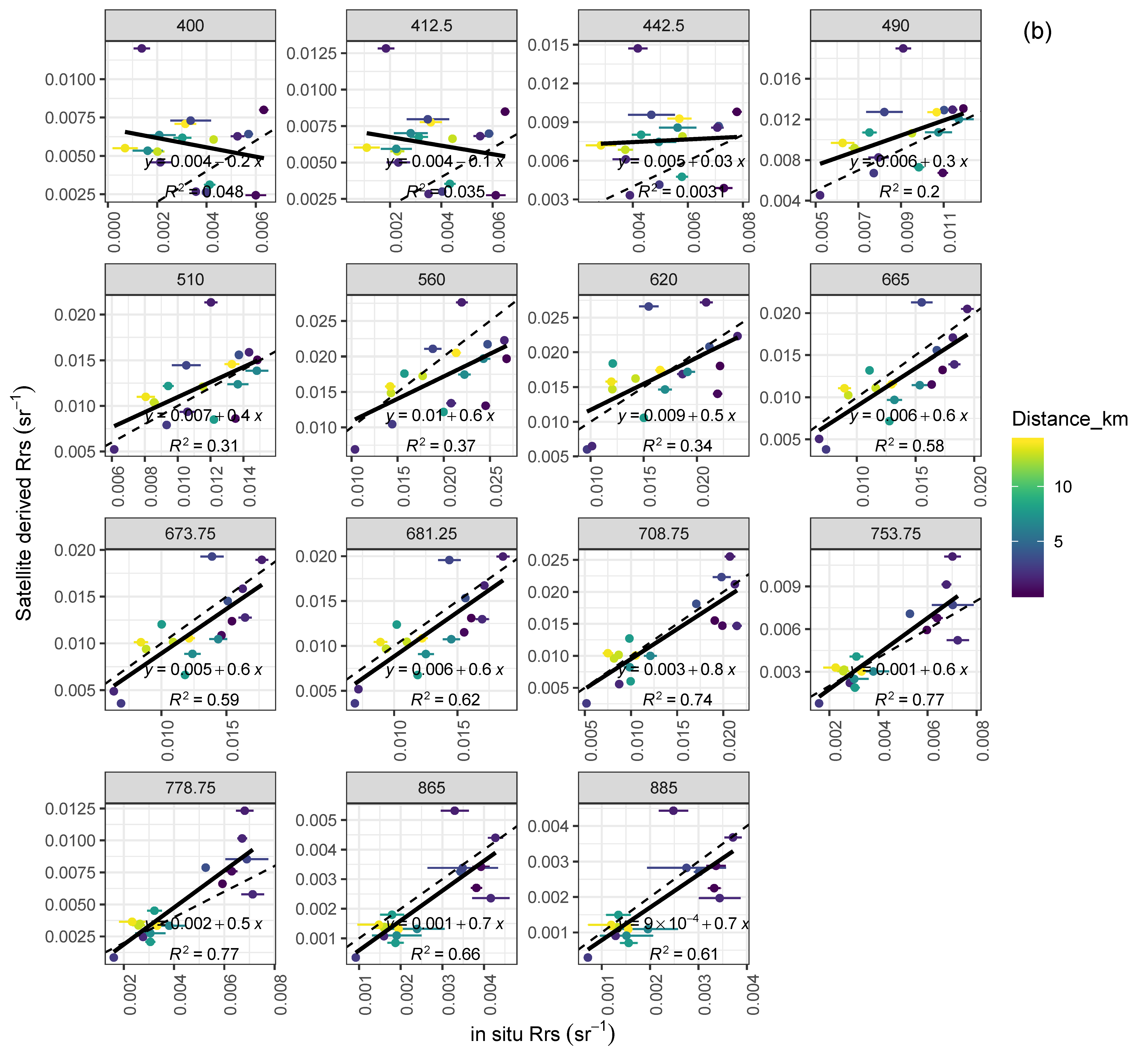
3.5. Filtering the In Situ Data Based on the Uncertainty
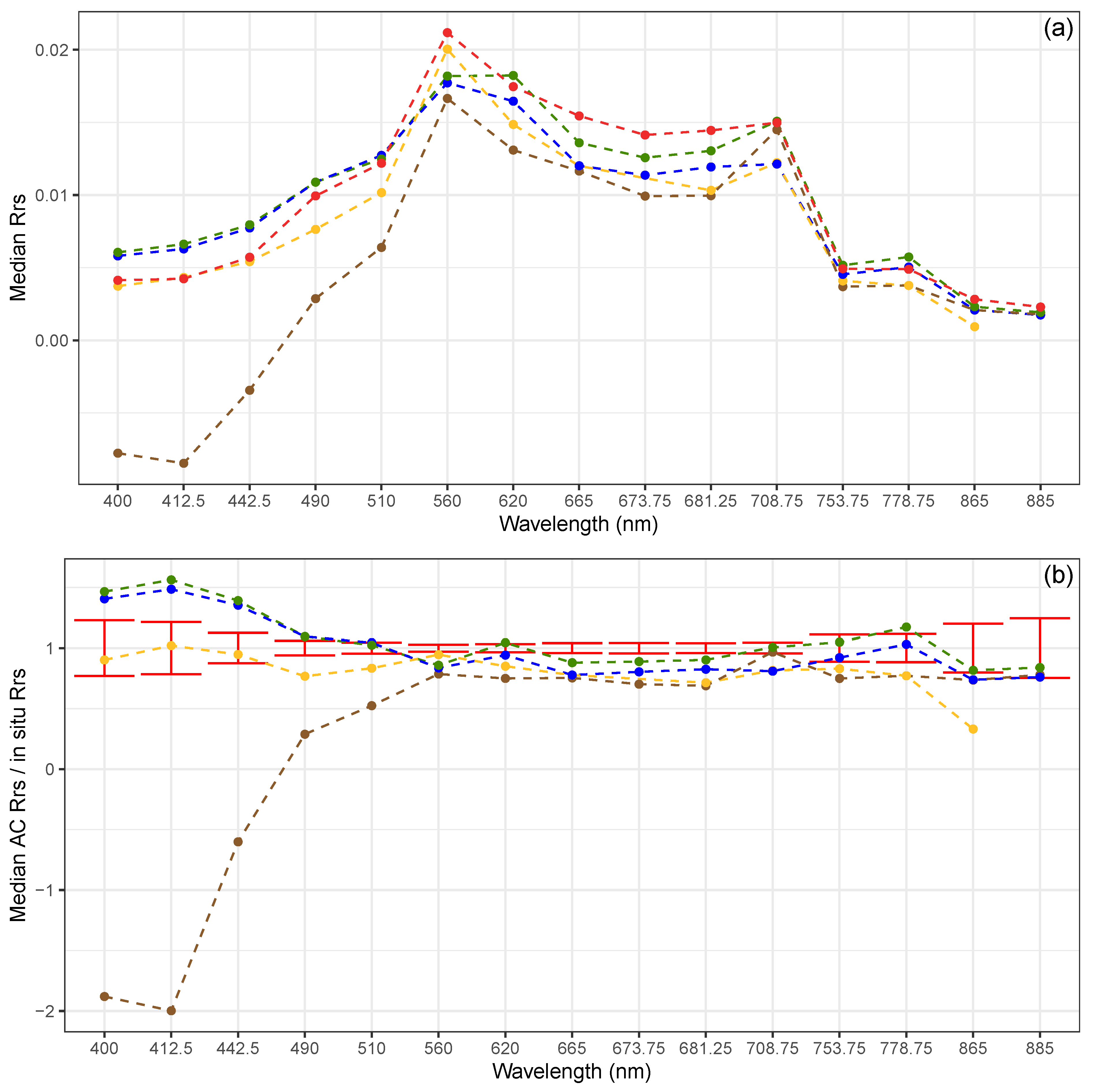
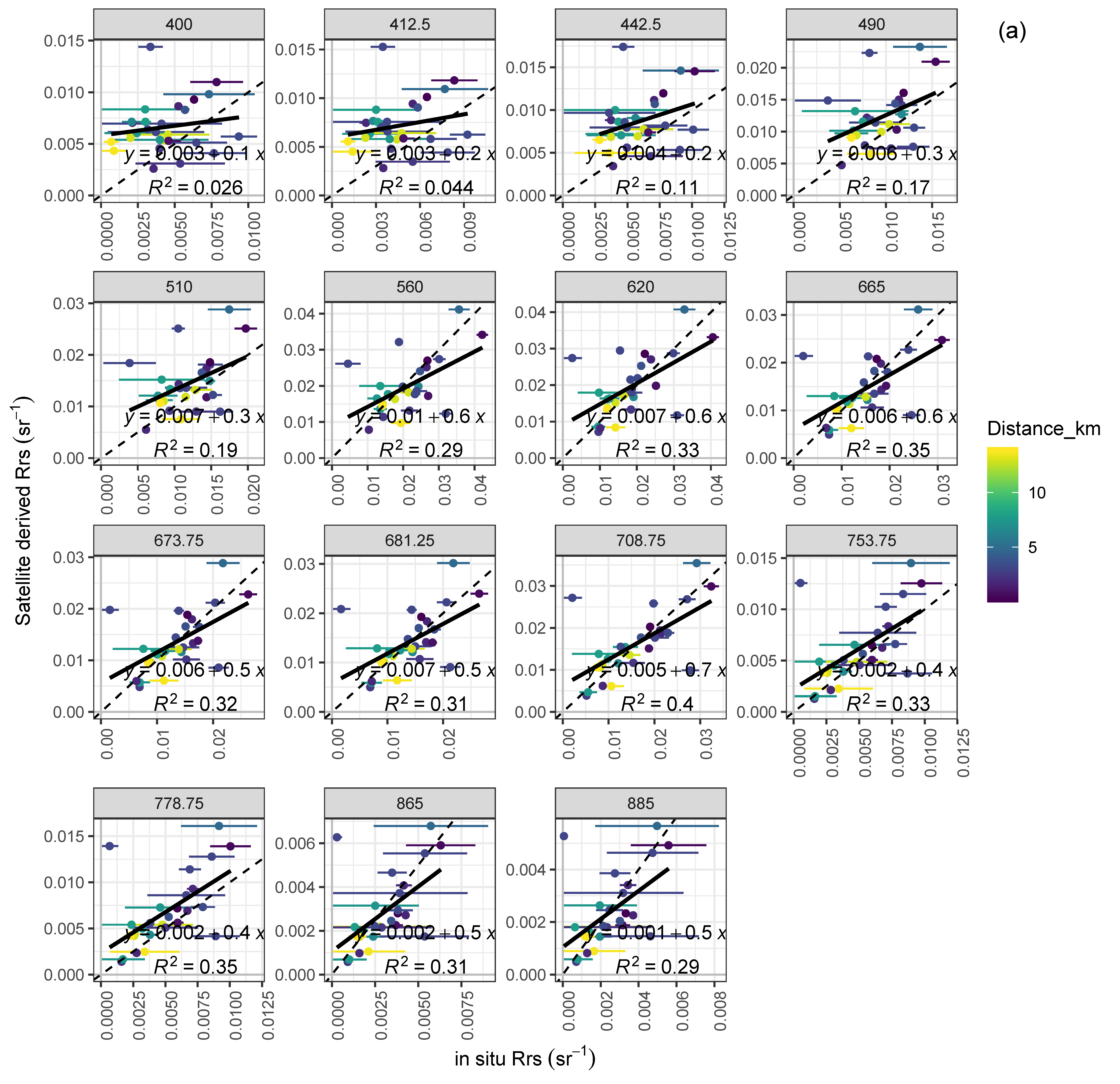
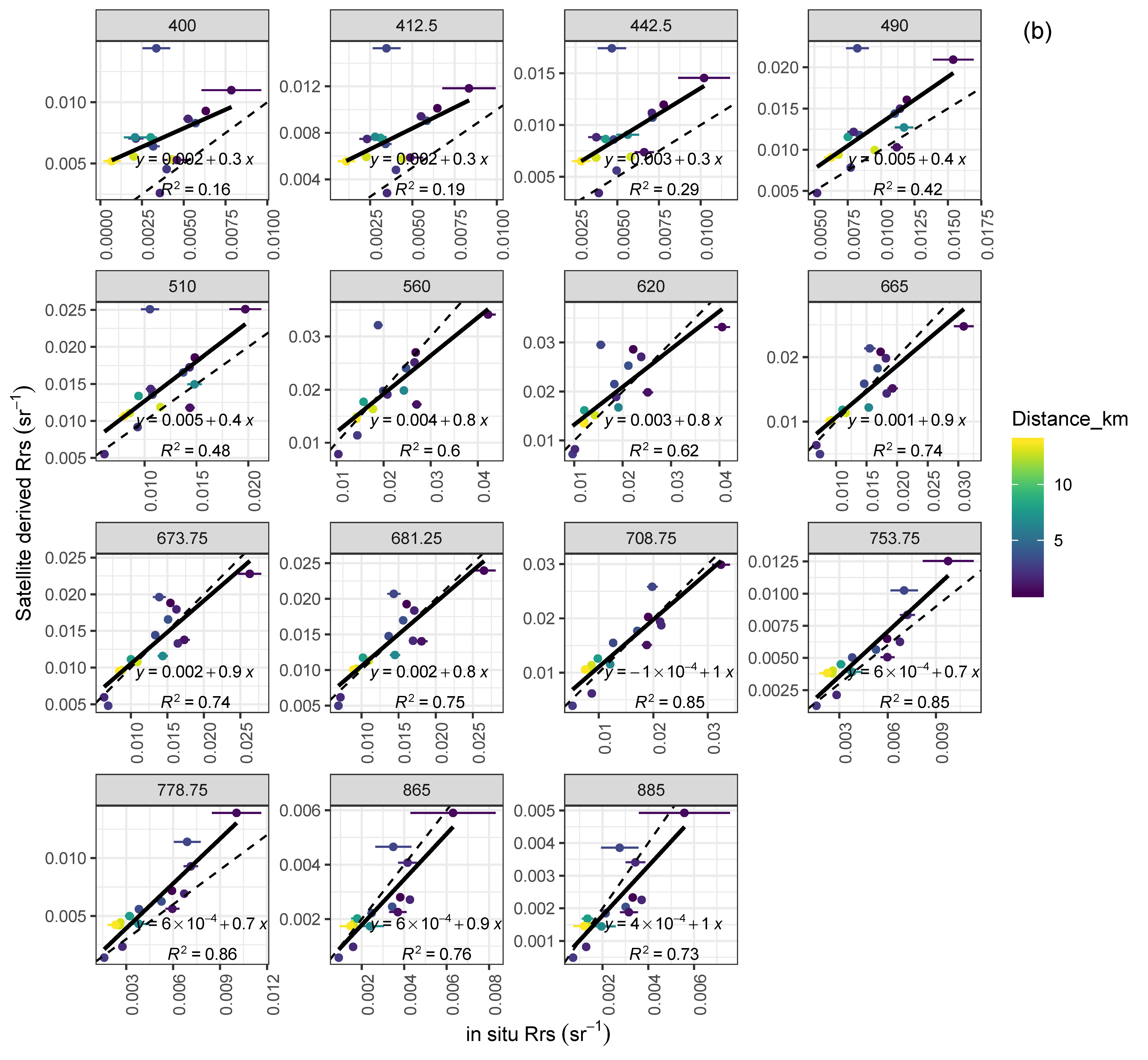
3.6. Comparability between AC Processors
4. Discussion
4.1. Sources and Variation of Uncertainties on the In Situ Measured Radiometric Data
4.2. Benefits of Including Uncertainty Budget for the In Situ Dataset
4.3. Comparison of Atmospheric Correction Algorithms over Optically Complex Waters
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| u(Rrs) | 400 | 412.5 | 442.5 | 490 | 510 | 560 | 620 | 665 | 673.75 | 681.25 | 708.75 | 753.75 | 778.75 | 865 | 885 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| <5 | 6 | 7 | 9 | 21 | 26 | 31 | 31 | 29 | 28 | 28 | 28 | 11 | 10 | 4 | 4 |
| <10 | 12 | 12 | 21 | 32 | 33 | 37 | 36 | 35 | 35 | 35 | 35 | 24 | 23 | 11 | 11 |
| <20 | 22 | 26 | 33 | 35 | 45 | 51 | 50 | 46 | 44 | 45 | 43 | 32 | 32 | 25 | 22 |
| <50 | 37 | 40 | 48 | 53 | 56 | 58 | 57 | 57 | 57 | 57 | 56 | 42 | 41 | 35 | 33 |
| 50–100 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 | 59 |
| Median | 31.9 | 26.4 | 17.5 | 8.7 | 6.8 | 3.9 | 4.2 | 5.2 | 6 | 5.9 | 5.7 | 16.2 | 15.7 | 27.4 | 31.7 |
| ID | Secchi (m) | TSM (gm3) | Chla (mg m3) | aCDOM (m−1) | Sun * | Solar .elev | Cloud (%) | Wind (m s) | Wave Height | Dist (km) | Unc (%) | In Situ Rrs | Sat_med Rrs | Difference (%) from the AC Median Rrs | Difference (%) from the In Situ Rrs | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Poly | L2 | ALT | C2R | insitu | Poly | L2 | ALT | C2R | ||||||||||||||
| 735 | 0.7 | 10.8 | 34.7 | 2.5 | 1 | 51 | 90 | 3.4 | 0.05 | 4.8 | 9.3 | 0.018 | 0.026 | 21 | −21 | NA | NA | 32 | −16 | −78 | NA | NA |
| 782 | 0.75 | 15.3 | 36.3 | 3.8 | 1 | 36 | 30 | 0 | 0 | 1.8 | 2.5 | 0.021 | 0.016 | −10 | 10 | 18 | −17 | −27 | 13 | 29 | 35 | 8 |
| 783 | 0.8 | 15.3 | 37.2 | 3.2 | 1 | 43 | 10 | 2.5 | 0.05 | 0.8 | 1.6 | 0.023 | −0.013 | NA | 0 | NA | NA | 286 | NA | 154 | NA | NA |
| 784 | 1.4 | 9.7 | 15.7 | 1.7 | 1 | 53 | 5 | 1.5 | 0.05 | 7.8 | 1.8 | 0.020 | 0.012 | −65 | 7 | 0 | NA | −64 | 0 | 43 | 39 | NA |
| 785 | 1.6 | 6.6 | 10.3 | 1.5 | 1 | 55 | 5 | 3.5 | 0.1 | 2.6 | 1.1 | 0.014 | 0.011 | −37 | 23 | 4 | −4 | −32 | −4 | 41 | 27 | 21 |
| 786 | 1.4 | 8.6 | 13.8 | 1.5 | 1 | 53 | 5 | 1 | 0 | 12.9 | 1.1 | 0.018 | 0.017 | −6 | 5 | −3 | 3 | −5 | 0 | 10 | 3 | 8 |
| 787 | 1.4 | 6.3 | 9.2 | 1.8 | 1 | 45 | 5 | 3.5 | 0.15 | 14.1 | 2.3 | 0.021 | 0.021 | −4 | 5 | 0 | NA | −4 | 0 | 9 | 4 | NA |
| 788 | 1.4 | 7.1 | 14.0 | 1.5 | 1 | 37 | 5 | 5.5 | 0.3 | 6.6 | 3 | 0.024 | 0.020 | −3 | 5 | 0 | 0 | −23 | 17 | 23 | 19 | 18 |
| 789 | 1.4 | 6.3 | 10.6 | 1.6 | 1 | 29 | 7 | 5 | 0.2 | 7.0 | 3 | 0.022 | 0.020 | −1 | 0 | 13 | NA | −10 | 9 | 9 | 21 | NA |
| 790 | 1.8 | 8.8 | 20.2 | 1.4 | 3 | 37 | 60 | 5 | 0.2 | 7.3 | 11.8 | 0.017 | 0.016 | −11 | 11 | NA | NA | −11 | 0 | 20 | NA | NA |
| 791 | 1.6 | 5.8 | 19.2 | 1.5 | 3 | 45 | 60 | 5 | 0.2 | 6.6 | 11.7 | 0.015 | 0.014 | −11 | 11 | NA | NA | −6 | −4 | 16 | NA | NA |
| 792 | 1.7 | 7.7 | 19.9 | 1.3 | 3 | 51 | 90 | 5.5 | 0.15 | 14.1 | 10.3 | 0.017 | 0.013 | −7 | 7 | NA | NA | −30 | 18 | 28 | NA | NA |
| 794 | 1.4 | 5.8 | 17.8 | 4.2 | 3 | 47 | 100 | 4.5 | 0.15 | 2.7 | 28.6 | 0.009 | −0.010 | NA | 0 | NA | NA | 194 | NA | 206 | NA | NA |
| 832 | 0.45 | 16.3 | 31.9 | 2.5 | 1 | 46 | 30 | 0 | 0.15 | 3.0 | 5.7 | 0.032 | 0.019 | −4 | 4 | −5 | 36 | −65 | 37 | 42 | 37 | 62 |
| 833 | 0.5 | 24.7 | 36.1 | 2.4 | 1 | 48 | 35 | 0.5 | 0.05 | 3.0 | 5.8 | 0.030 | 0.028 | −3 | −3 | 9 | 3 | −6 | 3 | 3 | 14 | 9 |
| 834 | 0.5 | 16.7 | 35.5 | 2.0 | 1 | 51 | 50 | 0 | 0.05 | 4.8 | 8.3 | 0.036 | 0.040 | 2 | −3 | 15 | −2 | 12 | −11 | −17 | 4 | −15 |
| 835 | 0.4 | 20.0 | 30.1 | 2.3 | 1 | 53 | 80 | 0 | 0.005 | 0.5 | 3.8 | 0.042 | 0.045 | 0 | −24 | NA | 24 | 6 | −6 | −31 | NA | 19 |
| 838 | 0.9 | 12.5 | 28.2 | 2.8 | 3 | 47 | 100 | 3 | 0 | 3.0 | 12.1 | 0.024 | 0.019 | NA | 55 | 0 | 0 | −28 | NA | 65 | 22 | 22 |
| 839 | 1.35 | 9.1 | 15.0 | 2.3 | 3 | 50 | 90 | 2 | 0.05 | 0.9 | 10.7 | 0.017 | 0.002 | NA | 0 | NA | NA | −905 | NA | 90 | NA | NA |
| 841 | 0.65 | 9.7 | 22.0 | 4.7 | 3 | 50 | 80 | 2.5 | 0.05 | 0.7 | 13.6 | 0.012 | −0.024 | NA | 0 | NA | NA | 150 | NA | 300 | NA | NA |
| 842 | 1.7 | 4.3 | 9.5 | 1.6 | 1 | 47 | 80 | 5.5 | 0.15 | 7.4 | 13.6 | 0.014 | 0.014 | −3 | 45 | 0 | 0 | 0 | −3 | 45 | 0 | 0 |
| 894 | 1.8 | 7.7 | 28.5 | 1.8 | 2 | 36 | 60 | 5 | 0.4 | 7.8 | 43.7 | 0.014 | 0.018 | −5 | 7 | 5 | −13 | 23 | −36 | −21 | −23 | −47 |
| 898 | 1.1 | 6.8 | 20.5 | 1.2 | 1 | 31 | 25 | 5 | 0.4 | 13.6 | 13.7 | 0.019 | 0.009 | 2 | −2 | 9 | −4 | −107 | 52 | 51 | 56 | 50 |
| 899 | 0.9 | 10.5 | 25.5 | 1.6 | 1 | 35 | 10 | 6 | 0.4 | 12.9 | 10.5 | 0.022 | 0.019 | −7 | −2 | 2 | 4 | −14 | 6 | 10 | 14 | 16 |
| 900 | 0.8 | 12.5 | 24.8 | 1.9 | 1 | 33 | 10 | 4 | 0.4 | 2.4 | 11.1 | 0.022 | 0.018 | −16 | 2 | −2 | 25 | −24 | 6 | 20 | 18 | 40 |
| 901 | 0.7 | 12.0 | 34.3 | 4.8 | 1 | 29 | 5 | 3 | 0.4 | 7.3 | 20.9 | 0.013 | 0.015 | 10 | 32 | −10 | −12 | 14 | −5 | 21 | −28 | −31 |
| 903 | 0.6 | 17.5 | 55.3 | 3.4 | 1 | 20 | 10 | 2 | 0.3 | 3.1 | 78.3 | 0.005 | 0.022 | −3 | 6 | 3 | −19 | 79 | −402 | −355 | −369 | −478 |
| 1981 | 0.7 | 16.0 | 29.1 | 3.5 | 3 | 35 | 60 | 1 | 0.01 | 0.6 | 21 | 0.005 | −0.057 | NA | 0 | NA | NA | 109 | NA | 1224 | NA | NA |
| 1982 | 0.7 | 17.5 | 48.5 | 3.4 | 3 | 41 | 70 | 2 | 0.1 | 3.1 | 5 | 0.019 | 0.022 | 9 | −4 | 4 | −46 | 14 | −6 | −21 | −12 | −71 |
| 1983 | 1.2 | 7.7 | 17.5 | 1.8 | 1 | 44 | 65 | 3 | 0.1 | 0.9 | 15.6 | 0.015 | −0.003 | NA | 0 | NA | NA | 646 | NA | 118 | NA | NA |
| 1985 | 1.1 | 8.4 | 19.6 | 1.9 | 1 | 46 | 60 | 2 | 0.1 | 7.8 | 2.2 | 0.016 | 0.017 | 5 | 8 | −5 | −5 | 6 | −2 | 2 | −12 | −13 |
| 1986 | 1.3 | 6.0 | 25.4 | 1.7 | 1 | 46 | 30 | 2 | 0.1 | 12.9 | 2.3 | 0.014 | 0.014 | 3 | 13 | −3 | −3 | 1 | 1 | 11 | −4 | −4 |
| 1987 | 1.4 | 7.3 | 24.6 | 1.7 | 3 | 40 | 25 | 4 | 0.2 | 13.8 | 3.9 | 0.014 | 0.015 | −5 | 9 | −4 | 4 | 6 | −12 | 3 | −11 | −2 |
| 2205 | 0.9 | 12.7 | 16.7 | NA | 4 | 29 | 60 | 2 | 0.01 | 0.9 | 3.7 | 0.027 | 0.017 | −26 | 35 | NA | 0 | −57 | 20 | 58 | NA | 36 |
| 2207 | 0.9 | 14.6 | 27.4 | NA | 4 | 42 | 50 | 2 | 0.15 | 0.5 | 1.8 | 0.025 | 0.015 | −60 | 0 | 13 | NA | −63 | 2 | 39 | 47 | NA |
| 2208 | 0.9 | 14.5 | 26.1 | NA | 4 | 46 | 40 | 1 | 0.1 | 1.6 | 1.5 | 0.027 | 0.023 | −4 | 7 | 4 | −9 | −15 | 10 | 19 | 16 | 5 |
| 2209 | 0.9 | 10.8 | 20.3 | NA | 4 | 50 | 80 | 0.5 | 0.05 | 0.3 | 1.2 | 0.027 | 0.025 | 7 | −7 | 21 | −9 | −8 | 14 | 1 | 27 | −1 |
| 2210 | 0.9 | 8.7 | 13.9 | NA | 4 | 52 | 100 | 1 | 0.1 | 3.6 | 1.2 | 0.025 | 0.023 | −5 | 11 | 5 | −6 | −8 | 3 | 18 | 12 | 3 |
| 2211 | 0.9 | 9.4 | 27.0 | NA | 4 | 51 | 80 | 3 | 0.2 | 1.8 | 1.3 | 0.010 | 0.007 | −35 | 37 | 6 | −6 | −41 | 4 | 55 | 34 | 24 |
| 2212 | 1 | 7.4 | 9.6 | NA | 4 | 50 | 80 | 4 | 0.2 | 3.2 | 1.8 | 0.020 | 0.020 | −6 | 16 | NA | 0 | −1 | −5 | 17 | NA | 1 |
| 2228 | 2 | 1.5 | 6.8 | 3.1 | 1 | 50 | 10 | 5 | 0.3 | 2.7 | 1.8 | 0.006 | 0.003 | −105 | 105 | NA | NA | −139 | 14 | 102 | NA | NA |
| 2230 | 1.6 | 4.0 | 9.0 | 3.2 | 1 | 43 | 40 | 3 | 0.1 | 13.9 | 27.2 | 0.003 | 0.003 | 24 | −24 | NA | NA | 3 | 22 | −27 | NA | NA |
| 2232 | 2.3 | 3.5 | 8.5 | 2.1 | 1 | 36 | 70 | 1 | 0 | 8.5 | 11.1 | 0.006 | 0.006 | 2 | −2 | NA | NA | 1 | 1 | −3 | NA | NA |
| 2284 | 1.2 | 5.7 | 15.1 | 5.7 | 1 | 43 | 0 | 4 | 0.15 | 3.2 | 3.2 | 0.004 | −0.003 | NA | 0 | NA | NA | 248 | NA | 168 | NA | NA |
| 2285 | 1.2 | 5.1 | 13.1 | 5.8 | 1 | 46 | 0 | 4 | 0.2 | 1.4 | 3.3 | 0.004 | 0.001 | −243 | 243 | NA | NA | −479 | 41 | 125 | NA | NA |
| 2286 | 1.8 | 6.0 | 11.1 | 4.1 | 1 | 48 | 3 | 4 | 0.3 | 7.3 | 4 | 0.004 | 0.001 | −102 | 102 | NA | NA | −204 | 34 | 101 | NA | NA |
| 2288 | 1.4 | 3.8 | 8.5 | 4.0 | 1 | 49 | 20 | 4 | 0.2 | 13.0 | 2.5 | 0.004 | 0.003 | −18 | 18 | NA | NA | −45 | 19 | 44 | NA | NA |
| 2578 | 0.7 | 22.3 | 34.7 | 3.2 | 2 | 37 | 80 | 4.5 | 0.4 | 1.4 | 2.9 | 0.022 | 0.023 | 1 | 0 | −23 | NA | 3 | −2 | −3 | −26 | NA |
| 2579 | 0.5 | 23.0 | 49.8 | 3.2 | 2 | 43 | 80 | 4 | 0.2 | 3.2 | 6 | 0.023 | 0.020 | −11 | 33 | −25 | 11 | −17 | 5 | 43 | −6 | 24 |









References
- Bulgarelli, B.; Zibordi, G. On the detectability of adjacency effects in ocean color remote sensing of midlatitude coastal environments by SeaWiFS, MODIS-A, MERIS, OLCI, OLI and MSI. Remote Sens. Environ. 2018, 209, 423–438. [Google Scholar] [CrossRef] [PubMed]
- EUMETSAT Mission Management. Sentinel-3 Product Notice—OLCI Level-2 Ocean Colour, v1; EUMETSAT: Darmstadt, Germany, 2019. [Google Scholar]
- ESA, Sentinel-3 Family Grows. Available online: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-3/Sentinel-3_family_grows (accessed on 21 December 2019).
- ESA. Sentinel-3 Mission Requirements Traceability Document (MRTD), EOP-SM/2184/CD-cd; ESA: Paris, France, 2011. [Google Scholar]
- ESA. Sentinel-3 Mission Requirements Document (MRD), EOPSMO/1151/MD-md; ESA: Paris, Franch, 2007; Available online: https://earth.esa.int/c/document_library/get_file?folderId=13019&name=DLFE-799.pdf (accessed on 20 December 2019).
- Vabson, V.; Kuusk, J.; Ansko, I.; Vendt, R.; Alikas, K.; Ruddick, K.; Ansper, A.; Bresciani, M.; Burmester, H.; Costa, M.; et al. Laboratory Intercomparison of Radiometers Used for Satellite Validation in the 400–900 nm Range. Remote Sens. 2019, 11, 1101. [Google Scholar] [CrossRef]
- Vabson, V.; Kuusk, J.; Ansko, I.; Vendt, R.; Alikas, K.; Ruddick, K.; Ansper, A.; Bresciani, M.; Burmester, H.; Costa, M.; et al. Field Intercomparison of Radiometers Used for Satellite Validation in the 400–900 nm Range. Remote Sens. 2019, 11, 1129. [Google Scholar] [CrossRef]
- Kratzer, S.; Moore, G. Inherent Optical Properties of the Baltic Sea in Comparison to Other Seas and Oceans. Remote Sens. 2018, 10, 418. [Google Scholar] [CrossRef]
- Kowalczuk, P.; Stedmon, C.A.; Markager, S. Modelling absorption by CDOM in the Baltic Sea from season, salinity and chlorophyll. Mar. Chem. 2006, 101, 1–11. [Google Scholar] [CrossRef]
- Harvey, E.T.; Kratzer, S.; Andersson, A. Relationships between colored dissolved organic matter and dissolved organic carbon in different coastal gradients of the Baltic Sea. AMBIO 2015, 44, 392–401. [Google Scholar] [CrossRef] [PubMed]
- Tilstone, G.H.; Moore, G.F.; Doerffer, R.; Røttgers, R.; Ruddick, K.G.; Pasterkamp, R.; Jørgensen, P.V. Regional Validation of MERIS Chlorophyll products in North Sea REVAMP Protocols Regional Validation of MERIS Chlorophyll products. In Proceedings of the Working Meeting on MERIS and AATSR Calibration and Geophysical Validation (ENVISAT MAVT-2003), Frascati, Italy, 20–24 October 2003. [Google Scholar]
- Vabson, V.; Ansko, I.; Alikas, K.; Kuusk, J.; Vendt, R.; Reinat, A. Improving Comparability of Radiometric In Situ Measurements with Sentinel-3A/OLCI Data. Presented at the Fourth S3VT Meeting, Darmstadt, Germany, 13–15 March 2018. [Google Scholar] [CrossRef]
- Ruddick, K.; De Cauwer, V.; Park, Y.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef]
- Ruddick, V.; De Cauwer, V.; Van Mol, B. Use of the near infrared similarity reflectance spectrum for the quality control of remote sensing data. Remote Sens. Coastal Ocean. Environ. 2005, 5885, 588501. [Google Scholar] [CrossRef]
- Alikas, K.; Ansko, I.; Vabson, V.; Ansper, A.; Kangro, K.; Randla, M.; Uudeberg, K.; Ligi, M.; Kuusk, J.; Randoja, R.; et al. Validation of Sentinel-3A/OLCI data over Estonian inland waters. Presented at the AMT4 Sentinel FRM Workshop; Plymouth, UK: 20–21 June 2017. [CrossRef]
- European Commission; Joint Research Centre (European Commission). Manual for Monitoring European Lakes Using Remote Sensing Techniques; Lindell, T., Pierson, D., Premazzi, G., Zilioli, E., Eds.; Office for Official Publications of the European Communities: Luxembourg, 1999; pp. 29–69. [Google Scholar]
- Jeffrey, S.W.; Humphrey, G.F. New spectrophotometric equations for determining chlorophylls a, b, c1 and c2 in higher plants, algae and natural phytoplankton. Biochem. Physiol. Pflanz. 1975, 167, 191–194. [Google Scholar] [CrossRef]
- Guide to the Expression of Uncertainty in Measurement; International Organization for Standardization (ISO): Geneva, Switzerland, 1995.
- Kuusk, J.; Ansko, I.; Vabson, V.; Ligi, M.; Vendt, R. Protocols and Procedures to Verify the Performance of Fiducial Reference Measurement (FRM) Field Ocean Colour Radiometers (OCR) Used for Satellite Validation; Technical Report TR-5; Tartu Observatory: Tõravere, Estonia, 2017. [Google Scholar]
- Santer, B.D.; Wigley, T.M.L.; Boyle, J.S.; Gaffen, D.J.; Hnilo, J.J.; Nychka, D.; Parker, D.E.; Taylor, K.E. Statistical significance of trends and trend differences in layer-average atmospheric temperature time series. J. Geophys. Res. Atmos. 2000, 105, 7337–7356. [Google Scholar] [CrossRef]
- Antoine, D.; Morel, A. A multiple scattering algorithm for atmospheric correction of remotely sensed ocean colour (MERISinstrument): Principle and implementation for atmospheres carrying various aerosols including absorbing ones. Int. J. Remote Sens. 1999, 20, 1875–1916. [Google Scholar] [CrossRef]
- Moore, G.F.; Aiken, J.; Lavender, S.J. The atmospheric correction of water colour and the quantitative retrieval of suspended particulate matter in Case II waters: Application to MERIS. Int. J. Remote Sens. 1999, 20, 1713–1733. [Google Scholar] [CrossRef]
- EUMETSAT. Sentinel-3 Marine User Handbook, v1H e-Signed; EUMETSAT: Darmstadt, Germany, 2018. [Google Scholar]
- Steinmetz, F.; Deschamps, P.Y.; Ramon, D. Atmospheric correction in presence of sun glint: Application to MERIS. Opt. Express 2011, 19, 9783–9800. [Google Scholar] [CrossRef] [PubMed]
- Steinmetz, F.; Ramon, D. Sentinel-2 MSI and Sentinel-3 OLCI consistent ocean colour products using POLYMER. In Proceedings of the SPIE 10778, Remote Sensing of the Open and Coastal Ocean and Inland Waters, Honolulu, HI, USA, 24–26 September 2018; p. 107780E. [Google Scholar] [CrossRef]
- Doerffer, R.; Schiller, H. The MERIS case 2 water algorithm. Int. J. Remote Sens. 2007, 28, 517–535. [Google Scholar] [CrossRef]
- Brockmann, C.; Doerffer, R.; Marco, P.; Stelzer, K.; Embacher, S.; Ruescas, A. Evolution Of The C2RCC Neural Network For Sentinel 2 and 3 For The Retrieval of Ocean Colour Products in Normal and Extreme Optically Complex Waters. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- International Vocabulary of Metrology—Basic and General Concepts and Associated Terms (VIM), 3rd ed.; JCGM 200: 2012. Available online: http://www.bipm.org/vim (accessed on 17 December 2019).
- Possolo, A.; Iyer, H.K. Invited Article: Concepts and tools for the evaluation of measurement uncertainty. Rev. Sci. Instrum. 2017, 88, 011301. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmäe, E.; Paavel, B.; Kauer, T. Removing glint effects from field radiometry data measured in optically complex coastal and inland waters. Remote Sens. Environ 2013, 133, 85–89. [Google Scholar] [CrossRef]
- Lee, Z.; Ahn, Y.-H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflectance from an above-surface platform. Opt. Express 2010, 18, 26313–26324. [Google Scholar] [CrossRef]
- Zibordi, G.; Berthon, J.-F.; Mélin, F.; D’Alimonte, D.; Kaitala, S. Validation of satellite ocean color primary products at optically complex coastal sites: Northern Adriatic Sea, Northern Baltic Proper and Gulf of Finland. Remote Sens. Environ. 2009, 113, 2574–2591. [Google Scholar] [CrossRef]
- Antoine, D.; d’Ortenzio, F.; Hooker, S.B.; Bécu, G.; Gentili, B.; Tailliez, D.; Scott, A.J. Assessment of uncertainty in the ocean reflectance determined by three satellite ocean color sensors (MERIS, SeaWiFS and MODIS-A) at an offshore site in the Mediterranean Sea (BOUSSOLE project). J. Geophys. Res. Ocean. 2008, 113, C07013. [Google Scholar] [CrossRef]
- Li, J.; Jamet, C.; Zhu, J.; Han, B.; Li, T.; Yang, A.; Guo, K.; Jia, D. Error Budget in the Validation of Radiometric Products Derived from OLCI around the China Sea from Open Ocean to Coastal Waters Compared with MODIS and VIIRS. Remote Sens. 2019, 11, 2400. [Google Scholar] [CrossRef]
- Gossn, J.I.; Ruddick, K.G.; Dogliotti, A.I. Atmospheric Correction of OLCI Imagery over Extremely Turbid Waters Based on the Red, NIR and 1016 nm Bands and a New Baseline Residual Technique. Remote Sens. 2019, 11, 220. [Google Scholar] [CrossRef]











| Parameter | Lake Peipsi | Lake Võrtsjärv | Baltic Sea Coastal |
|---|---|---|---|
| Mean depth, m | 7 | 2.8 | 7.5 |
| Max depth, m | 15.3 | 6 | 12 |
| Chla, mg·m−3 | 2.7–122 (25.1) | 3.4–72.2 (40.4) | 0.7–10.7 (4.1) |
| CTSM, g·m−3 | 1.3–61.3 (8.8) | 1.6–52.7 (16) | 5.0–24.3 (10) |
| aCDOM (442), m−1 | 1.2–7 (2.9) | 1.9–8.9 (2.9) | 0.6–3.7 (0.9) |
| Secchi depth, m | 0.4–3.6 (1.5) | 0.2–2.6 (0.75) | 0.5–4.3 (1.3) |
| Parameters | PC1 | PC2 | PC3 | PC4 | PC5 | PC6 | PC7 | PC8 | PC9 | PC10 |
|---|---|---|---|---|---|---|---|---|---|---|
| TSM (g·m−3) | 0.53 | −0.09 | 0.15 | 0.01 | 0.07 | 0.01 | 0.19 | 0.12 | −0.55 | 0.57 |
| Chl a (mg·m−3) | 0.41 | −0.29 | 0.11 | 0.31 | 0.27 | −0.22 | 0.33 | 0.32 | 0.13 | −0.54 |
| aCDOM(442) (m−1) | 0.09 | −0.31 | −0.45 | 0.38 | −0.59 | −0.03 | −0.25 | −0.02 | −0.33 | −0.18 |
| Secchi (m) | −0.49 | 0.12 | −0.20 | 0.06 | 0.40 | 0.11 | 0.14 | 0.23 | −0.64 | −0.22 |
| Rrs(560) (sr−1) | 0.31 | 0.31 | 0.34 | −0.36 | −0.22 | 0.32 | −0.32 | 0.16 | −0.25 | −0.47 |
| Solar elevation angle (°) | 0.04 | 0.51 | −0.17 | -0.19 | −0.39 | −0.46 | 0.55 | −0.04 | −0.08 | −0.10 |
| Overall sky cloudiness (%) | 0.09 | 0.46 | 0.11 | 0.41 | 0.22 | −0.52 | −0.52 | −0.01 | −0.06 | 0.06 |
| Wind speed (m·s−1) | −0.38 | −0.04 | 0.46 | 0.21 | −0.39 | −0.05 | 0.05 | 0.63 | 0.07 | 0.19 |
| Wave height (m) | −0.22 | −0.31 | 0.57 | −0.01 | −0.08 | −0.29 | 0.07 | −0.56 | −0.30 | −0.17 |
| Sun conditions * | 0.04 | 0.37 | 0.16 | 0.61 | −0.08 | 0.52 | 0.29 | −0.31 | 0.04 | −0.02 |
| Cumulative Proportion | 31 | 57 | 73 | 85 | 91 | 94 | 97 | 98 | 99 | 100 |
| MAPD (%) | MPD (%) | |||||||
|---|---|---|---|---|---|---|---|---|
| Name | Polymer | Standard | ALTNN | C2RCC | Polymer | Standard | ALTNN | C2RCC |
| 400 | 50 | 353 | 109 | 136 | 25 | −276 | 97 | 120 |
| 412.5 | 43 | 336 | 93 | 116 | 22 | −312 | 83 | 103 |
| 442.5 | 22 | 194 | 56 | 74 | 6 | −192 | 50 | 64 |
| 490 | 22 | 82 | 35 | 52 | −5 | −82 | 28 | 40 |
| 510 | 24 | 56 | 31 | 48 | −2 | −51 | 21 | 36 |
| 560 | 29 | 38 | 35 | 42 | 14 | −2 | 7 | 16 |
| 620 | 40 | 49 | 71 | 69 | 16 | 4 | 52 | 51 |
| 665 | 51 | 62 | 67 | 64 | 20 | 12 | 41 | 39 |
| 673.75 | NA | 68 | 73 | 72 | NA | 14 | 48 | 49 |
| 681.25 | 56 | 66 | 70 | 72 | 21 | 16 | 46 | 50 |
| 708.75 | 64 | 73 | 68 | 78 | 24 | 40 | 42 | 55 |
| 753.75 | 75 | 97 | 93 | 138 | 55 | 58 | 72 | 122 |
| 778.75 | 56 | 71 | 88 | 125 | 24 | 25 | 71 | 114 |
| 865 | 70 | 90 | 76 | 119 | −50 | 32 | 32 | 81 |
| 885 | NA | 268 | 241 | 421 | NA | 214 | 198 | 386 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alikas, K.; Ansko, I.; Vabson, V.; Ansper, A.; Kangro, K.; Uudeberg, K.; Ligi, M. Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements. Remote Sens. 2020, 12, 616. https://doi.org/10.3390/rs12040616
Alikas K, Ansko I, Vabson V, Ansper A, Kangro K, Uudeberg K, Ligi M. Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements. Remote Sensing. 2020; 12(4):616. https://doi.org/10.3390/rs12040616
Chicago/Turabian StyleAlikas, Krista, Ilmar Ansko, Viktor Vabson, Ave Ansper, Kersti Kangro, Kristi Uudeberg, and Martin Ligi. 2020. "Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements" Remote Sensing 12, no. 4: 616. https://doi.org/10.3390/rs12040616
APA StyleAlikas, K., Ansko, I., Vabson, V., Ansper, A., Kangro, K., Uudeberg, K., & Ligi, M. (2020). Consistency of Radiometric Satellite Data over Lakes and Coastal Waters with Local Field Measurements. Remote Sensing, 12(4), 616. https://doi.org/10.3390/rs12040616