Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Areas
2.2. Lidar Data for Validation
2.3. Sentinel-2A/B Imagery
2.4. Atmospheric Correction
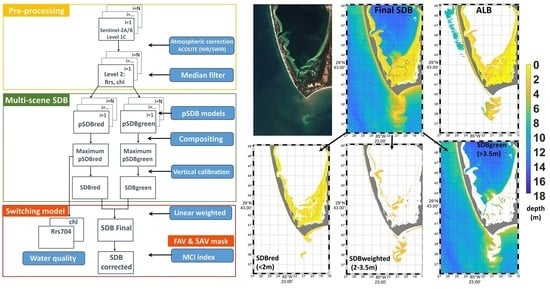
2.5. Satellite-Derived Bathymetry Model
2.6. Multi-Scene Approach
2.7. Vertical Referencing with Chart Soundings
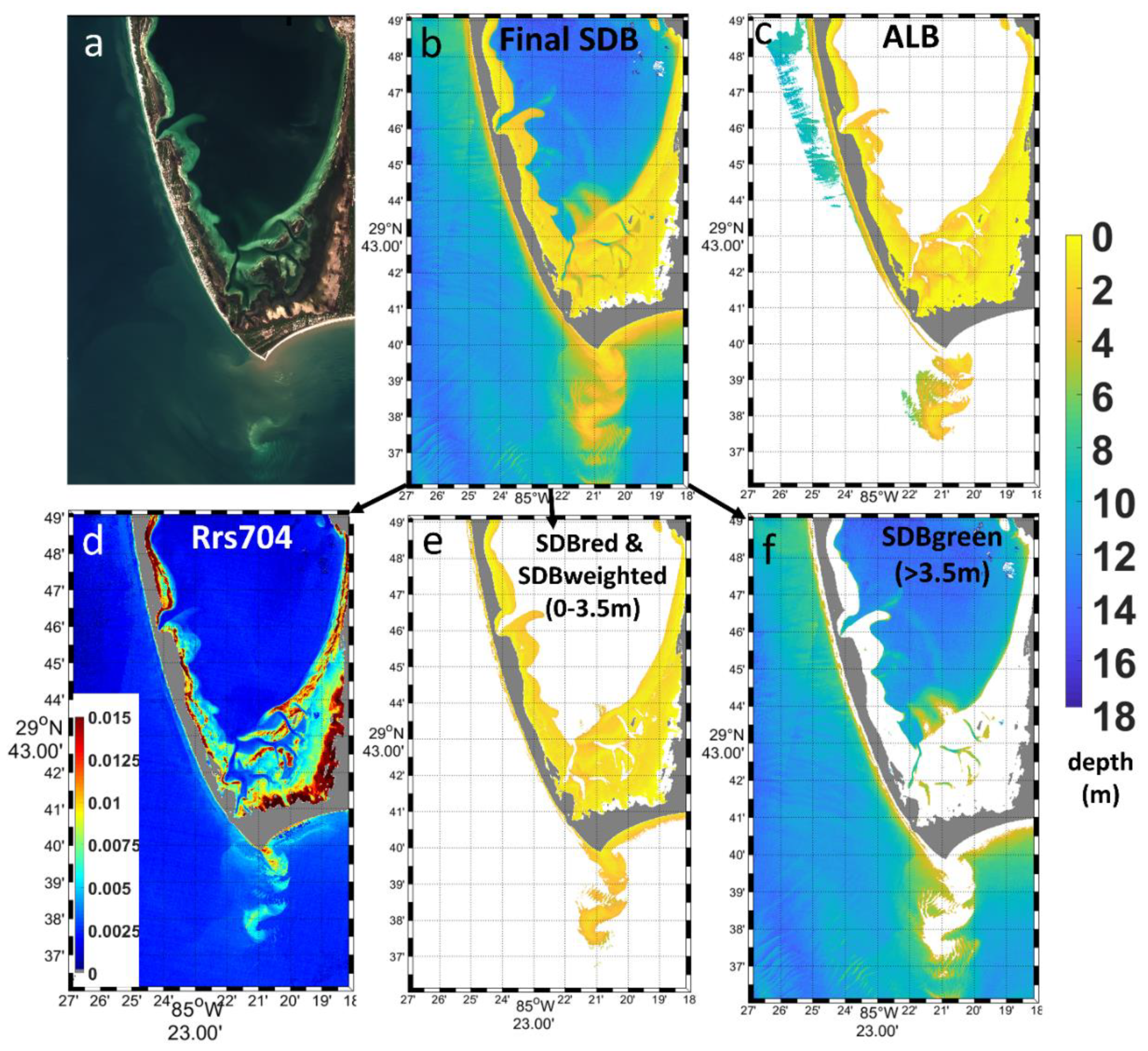
2.8. Switching Model
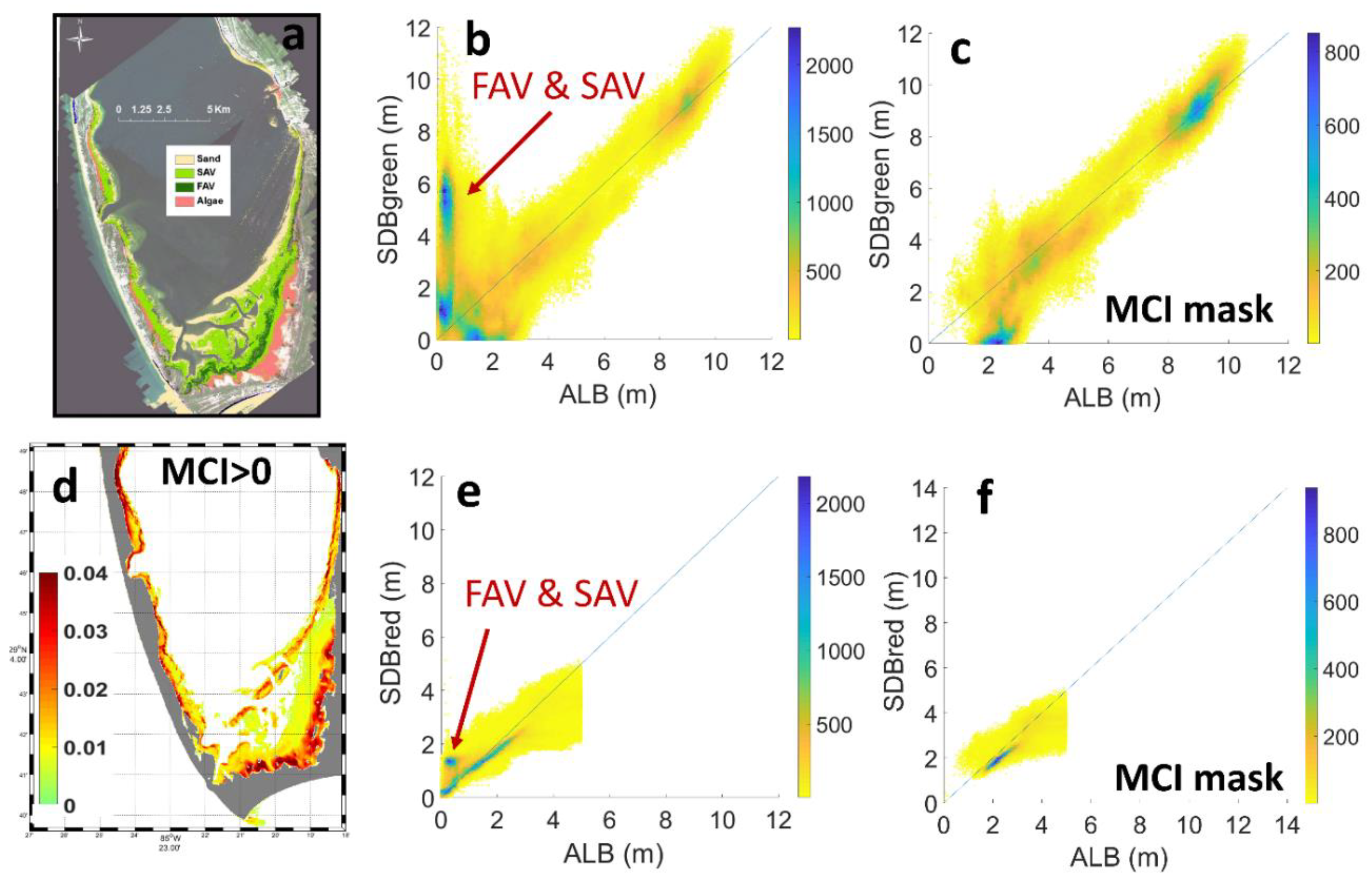
2.9. Submerged and Floating Aquatic Vegetation Masking
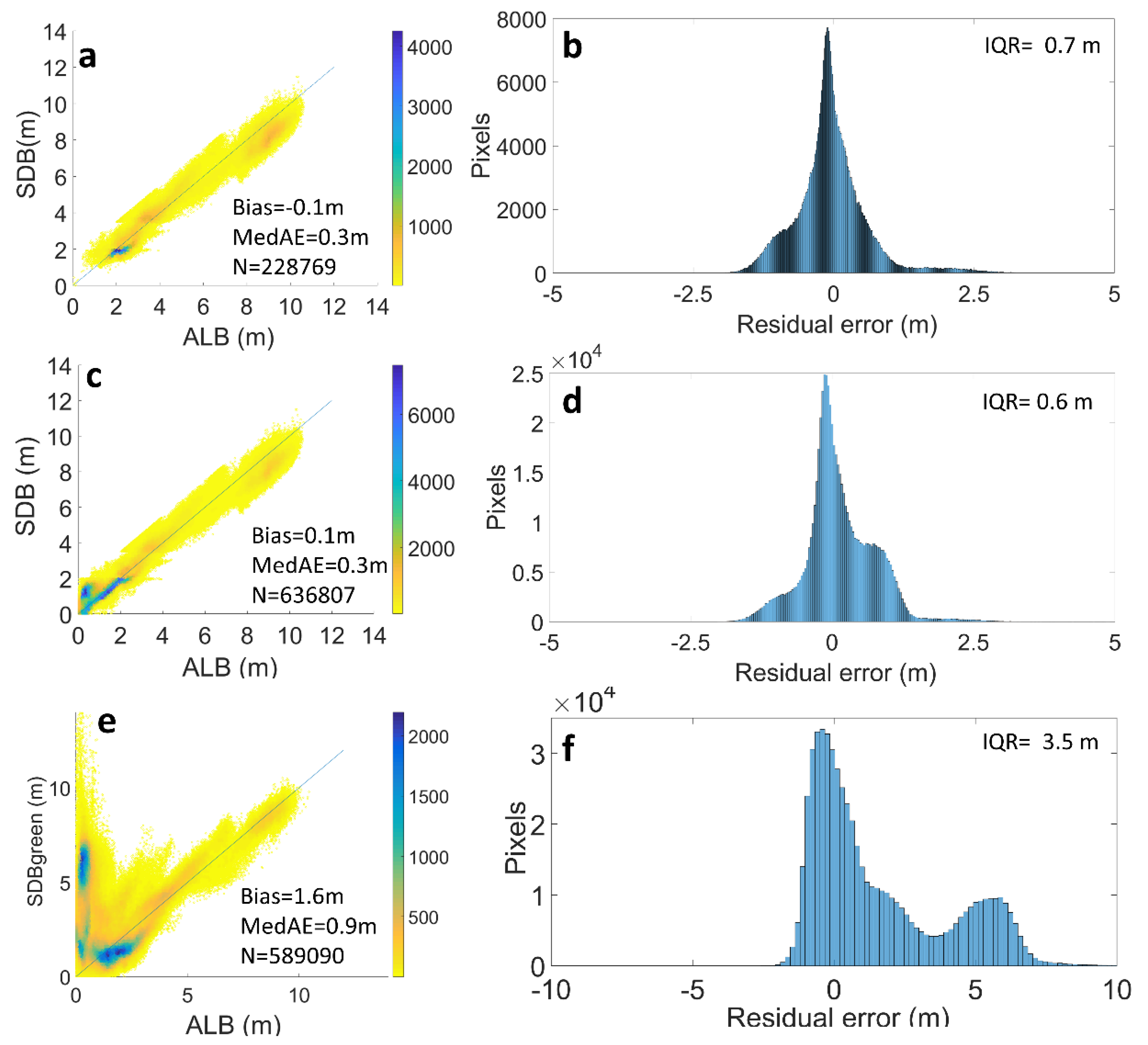
3. Results
3.1. Cape Lookout in North Carolina
3.2. Saint Joseph Bay in Florida
4. Discussion
5. Concluding Remarks
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. Transforming Our World: The 2030 Agenda for Sustainable Development. 2015. Available online: https://sustainabledevelopment.un.org/post2015/transformingourworld/publication (accessed on 10 June 2019).
- Charles, E.; Douvere, F. Marine Spatial Planning: A Step-by-Step Approach toward Ecosystem-Based Management. Intergovernmental Oceanographic Commission and Man and the Biosphere Programme. IOC Manual and Guides; ICAM Dossier No. 6; UNESCO: Paris, France, 2009; p. 99. [Google Scholar]
- International Hydrographic Organization. International Hydrographic Review. 2017. Available online: https://www.iho.int/mtg_docs/IHReview/2017/IHR_May2017.pdf (accessed on 15 October 2019).
- International Hydrographic Organization. International Hydrographic Review. 2017. Available online: https://www.iho.int/mtg_docs/IHReview/2017/IHR_November2017.pdf (accessed on 15 October 2019).
- International Hydrographic Organization. International Hydrographic Publication C-55 Status of Hydrographic Surveying and Charting Worldwide. 2018. Available online: http://iho.int/mtg_docs/misc_docs/basic_docs/IHO_Work_Programme_for_2019_final.pdf (accessed on 15 October 2019).
- Carron, M.J.; Vogt, P.R.; Jung, W.Y. A proposed international long-term project to systematically map the world’s ocean floors from beach to trench: GOMaP (Global Ocean Mapping Program). Int. Hydrogr. Rev. 2001, 2. [Google Scholar]
- Marks, K.M. International Hydrographic Organization, Intergovernmental Oceanographic Commission, The IHO-IOC GEBCO Cook Book; IHO Publication B-11, IOC Manuals and Guides 63; IOC: Monaco, France, 2019; 493p. [Google Scholar]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.; Brando, V.; Giardino, C.; Kutser, T.; Phinn, S.; Mumby, P.; Barrilero, O.; Laporte, J.; Koetzh, B. Coral reef applications of Sentinel-2: Coverage, characteristics, bathymetry and benthic mapping with comparison to Landsat 8. Remote Sens. Environ. 2018, 216, 598–614. [Google Scholar] [CrossRef]
- Tripathi, N.K.; Rao, A.M. Bathymetric mapping in Kakinada Bay, India, using IRS-1D LISS-III data. Int. J. Remote Sens. 2002, 23, 1013–1025. [Google Scholar] [CrossRef]
- Philpot, W.D.; Davis, C.O.; Bissett, W.P.; Mobley, C.D.; Kohler, D.C.D.; Lee, Z.; Bowles, J.; Steward, R.G.; Agrawal, Y.; Trowbridge, J.; et al. Bottom Characterization from Hyperspectral Image Data. Oceanography 2004, 17, 76–85. [Google Scholar] [CrossRef]
- Minghelli-Roman, A.; Dupouy, C. Influence of water column chlorophyll concentration on bathymetric estimations in the lagoon of New Caledonia, using several MERIS images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 739–745. [Google Scholar] [CrossRef]
- Hamylton, S.M.; Hedley, J.D.; Beaman, R.J. Derivation of high-resolution bathymetry from multispectral satellite imagery: A comparison of empirical and optimization methods through geographical error analysis. Remote Sens. 2015, 7, 16257–16273. [Google Scholar] [CrossRef]
- Khondoker, M.S.I.; Siddiquee, M.Z.H.; Islam, M. The Challenges of River Bathymetry Survey Using Space Borne Remote Sensing in Bangladesh. Atmos. Ocean. Sci. 2016, 1, 7–13. [Google Scholar]
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating satellite-derived bathymetry (SDB) with the google earth engine and sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Chu, S.; Cheng, L.; Ruan, X.; Zhuang, Q.; Zhou, X.; Li, M.; Shi, Y. Technical Framework for Shallow-Water Bathymetry With High Reliability and No Missing Data Based on Time-Series Sentinel-2 Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1–19. [Google Scholar] [CrossRef]
- Evagorou, E.G.; Mettas, C.; Agapiou, A.; Themistocleous, K.; Hadjimitsis, D.G. Bathymetric maps from multi-temporal analysis of Sentinel-2 data: The case study of Limassol, Cyprus. Adv. Geosci. 2019, 45, 397–407. [Google Scholar] [CrossRef]
- Poursanidis, D.; Traganos, D.; Chrysoulakis, N.; Reinartz, P. Cubesats Allow High Spatiotemporal Estimates of Satellite-Derived Bathymetry. Remote Sens. 2019, 11, 1299. [Google Scholar] [CrossRef]
- Sagawa, T.; Yamashita, Y.; Okumura, T.; Yamanokuchi, T. Satellite Derived Bathymetry Using Machine Learning and Multi-Temporal Satellite Images. Remote Sens. 2019, 11, 1155. [Google Scholar] [CrossRef]
- Pe’eri, S.; Madore, B.; Nyberg, J.; Snyder, L.; Parrish, C.; Smith, S. Identifying bathymetric differences over Alaska’s North Slope using a satellite-derived bathymetry multi-temporal approach. J. Coast. Res. 2016, 76, 56–63. [Google Scholar] [CrossRef]
- Caballero, I.; Stump, P.R.; Meredith, A. Preliminary assessment of turbidity and chlorophyll impact on bathymetry derived from Sentinel-2A and Sentinel-3A satellites in South Florida. Remote Sens. 2019, 11, 645. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Feldman, G.C.; Kuring, N.; Franz, B.; Green, E.; Robinson, J. SeaWiFS spies reefs. Reef Encount. 1990, 26, 29–30. [Google Scholar]
- National Aeronautics and Space Administration. Remote Sensing of Coral Reefs: SeaWiFS Bathymetry and Data Archive Proof-of-Concept. 2003. Available online: https://oceancolor.gsfc.nasa.gov/cgi/reefs.pl (accessed on 15 September 2019).
- Minghelli-Roman, A.; Goreac, A.; Mathieu, S.; Spigai, M.; Gouton, P. Comparison of bathymetric estimation using different satellite images in coastal sea waters. Int. J. Remote Sens. 2009, 30, 5737–5750. [Google Scholar] [CrossRef]
- Kanno, A.; Tanaka, Y.; Shinohara, R.; Kurosawa, A.; Sekine, M. Which spectral bands of Worldview-2 are useful in remote sensing of water depth? A case study in coral reefs. Mar. Geod. 2014, 37, 283–292. [Google Scholar] [CrossRef]
- European Commission. Copernicus for Coastal Zone Monitoring and Management Workshop; Technical Report; Copernicus Support Office, 2017; Available online: https://land.copernicus.eu/user-corner/technical-library/report-of-the-coastal-zone-monitoring-and-management-workshop (accessed on 1 October 2019).
- Canadian Hydrographic Service. First international Hydrographic Remote Sensing (HRS) workshop, workshop report. In Proceedings of the First International Hydrographic Remote Sensing (HRS) Workshop, Ottawa, ON, Canada, 18–20 September 2018. [Google Scholar]
- Li, J.; Schill, S.R.; Knapp, D.E.; Asner, G.P. Object-Based Mapping of Coral Reef Habitats Using Planet Dove Satellites. Remote Sens. 2019, 11, 1445. [Google Scholar] [CrossRef]
- Poursanidis, D.; Traganos, D.; Reinartz, P.; Chrysoulakis, N. On the use of Sentinel-2 for coastal habitat mapping and satellite-derived bathymetry estimation using downscaled coastal aerosol band. Int. J. Appl. Earth Obs. Geoinf. 2019, 80, 58–70. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48 Pt 2, 547–556. [Google Scholar] [CrossRef]
- Wells, J.T. Accumulation of fine-grained sediments in a periodically energetic clastic environment, Cape Lookout Bight, North Carolina. J. Sediment. Res. 1988, 58, 596–606. [Google Scholar]
- Berndt, M.P.; Franklin, M.A. Water-Quality and Discharge Data for St. Joseph Bay, Florida, 1997–1998; Department of the Interior: Washington, DC, USA, 1999; Available online: https://apps.dtic.mil/dtic/tr/fulltext/u2/a442268.pdf (accessed on 1 October 2019).
- Mienis, F.; Duineveld, G.C.A.; Davies, A.J.; Lavaleye, M.M.S.; Ross, S.W.; Seim, H.; Brooke, S. Cold-water coral growth under extreme environmental conditions, the Cape Lookout area, NW Atlantic. Biogeosciences 2014, 11, 2543–2560. [Google Scholar] [CrossRef]
- Joshi, I.D.; D’Sa, E.J.; Osburn, C.L.; Bianchi, T.S. Turbidity in Apalachicola bay, Florida from Landsat 5 TM and field data: Seasonal patterns and response to extreme events. Remote Sens. 2017, 9, 367. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel-2 User Handbook; ESA Standard Document; ESA: Paris, France, 2015; Available online: https://sentinel.esa.int/documents/247904/685211/Sentinel-2_User_Handbook (accessed on 20 June 2019).
- Sentinel’s Scientific Data Hub. Available online: https://scihub.copernicus.eu/ (accessed on 15 May 2019).
- European Space Agency. Sentinel-2 MSI Technical Guide. 2017. Available online: https://earth.esa.int/web/sentinel/technical-guides/sentinel-2-msi (accessed on 5 May 2019).
- Vanhellemont, Q.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Advantages of high quality SWIR bands for ocean colour processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic Applications of MSI Imagery. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Ruddick, K.; Vanhellemont, Q.; Dogliotti, A.; Nechad, B.; Pringle, N.; Van der Zande, D. New Opportunities and Challenges for High Resolution Remote Sensing of Water Colour. In Proceedings of the Ocean Optics XXIII, Victoria, BC, Canada, 7 October 2016. [Google Scholar]
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P. Retrieval of nearshore bathymetry from Sentinel-2A and 2B satellites in South Florida coastal waters. Estuar. Coast. Shelf Sci. 2019, 226, 106277. [Google Scholar] [CrossRef]
- Toming, K.; Kutser, T.; Laas, A.; Sepp, M.; Paavel, B.; Nõges, T. First experiences in mapping lake water quality parameters with Sentinel-2 MSI imagery. Remote Sens. 2016, 8, 640. [Google Scholar] [CrossRef]
- Davis, R.A.; Fitzgerald, D.M. Beaches and Coasts; Blackwell Publishing Company: Malden, MA, USA, 2014; p. 419. [Google Scholar]
- National Oceanic and Atmospheric Administration. NOAA Nautical Chart Catalog and Locator. 2019. Available online: http://www.charts.noaa.gov/ (accessed on 1 May 2019).
- National Oceanic and Atmospheric Administration. Atlas of the Shallow-Water Benthic Habitats of the Northwestern Hawaiian Islands. 2003; p. 160. Available online: https://cdn.coastalscience.noaa.gov/datasets/e98/docs/NWHI_Atlas_sec1.pdf (accessed on 1 May 2019).
- Linklater, M.; Hamylton, S.M.; Brooke, B.P.; Nichol, S.L.; Jordan, A.R.; Woodroffe, C.D. Development of a seamless, high-resolution bathymetric model to compare reef morphology around the subtropical island shelves of Lord Howe Island and Balls Pyramid, southwest Pacific Ocean. Geosciences 2018, 8, 11. [Google Scholar] [CrossRef]
- Bramante, J.F.; Raju, D.K.; Sin, T.M. Multispectral derivation of bathymetry in Singapore’s shallow, turbid waters. Int. J. Remote Sens. 2013, 34, 2070–2088. [Google Scholar] [CrossRef]
- Hill, V.J.; Zimmerman, R.C.; Bissett, W.P.; Dierssen, H.; Kohler, D.D. Evaluating light availability, seagrass biomass, and productivity using hyperspectral airborne remote sensing in Saint Joseph’s Bay, Florida. Estuar. Coasts 2014, 37, 1467–1489. [Google Scholar] [CrossRef]
- Gitelson, A. The peak near 700 nm on radiance spectra of algae and water: Relationships of its magnitude and position with chlorophyll concentration. Int. J. Remote Sens. 1992, 13, 3367–3373. [Google Scholar] [CrossRef]
- Gower, J.; King, S. Distribution of floating Sargassum in the Gulf of Mexico and the Atlantic Ocean mapped using MERIS. Int. J. Remote Sens. 2011, 32, 1917–1929. [Google Scholar] [CrossRef]
- Gower, J.; King, S.; Borstad, G.; Brown, L. Detection of intense plankton blooms using the 709 nm band of the MERIS imaging spectrometer. Int. J. Remote Sens. 2005, 26, 2005–2012. [Google Scholar] [CrossRef]
- Casal, G.; Monteys, X.; Hedley, J.; Harris, P.; Cahalane, C.; McCarthy, T. Assessment of empirical algorithms for bathymetry extraction using Sentinel-2 data. Int. J. Remote Sens. 2019, 40, 2855–2879. [Google Scholar] [CrossRef]
- International Hydrographic Organization IHO. S-57 Supplement No. 3-Supplementary Information for the Encoding of S-57 Edition 3.1 ENC Data; International Hydrographic Organization: Monaco, France, 2014; Available online: https://www.iho.int/iho_pubs/standard/S-57Ed3.1/S-57_e3.1_Supp3_Jun14_EN.pdf (accessed on 5 September 2019).
- Geyman, E.C.; Maloof, A.C. A simple method for extracting water depth from multispectral satellite imagery in regions of variable bottom type. Earth Space Sci. 2019, 6, 527–537. [Google Scholar] [CrossRef]
- Eugenio, F.; Marcello, J.; Martin, J. High-resolution maps of bathymetry and benthic habitats in shallow-water environments using multispectral remote sensing imagery. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3539–3549. [Google Scholar] [CrossRef]
- Pacheco, A.; Horta, J.; Loureiro, C.; Ferreira, Ó. Retrieval of nearshore bathymetry from Landsat 8 images: A tool for coastal monitoring in shallow waters. Remote Sens. Environ. 2015, 159, 102–116. [Google Scholar] [CrossRef]
- Kabiri, K. Accuracy assessment of near-shore bathymetry information retrieved from Landsat-8 imagery. Earth Sci. Inform. 2017, 10, 235–245. [Google Scholar]
- Kerr, J.M.; Purkis, S. An algorithm for optically-deriving water depth from multispectral imagery in coral reef landscapes in the absence of ground-truth data. Remote Sens. Environ. 2018, 210, 307–324. [Google Scholar] [CrossRef]
- Coastal Thematic Exploitation Platform—Coastal-TEP. Available online: https://www.coastal-tep.eu/geobrowser/ (accessed on 20 November 2019).
- Wölfl, A.C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Lamarche, G. Seafloor Mapping–the challenge of a truly global ocean bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Date | Sensor | pSDBred (%) | pSDBgreen (%) |
|---|---|---|---|---|
| 1 | 01/23/2017 | A | 3.1 | 16.5 |
| 2 | 02/12/2017 | A | 9.46 | 0.5 |
| 3 | 02/25/2017 | A | 8.5 | 37.33 |
| 4 | 03/04/2017 | A | 5.28 | 25 |
| 5 | 03/17/2017 | A | 14.7 | 16.21 |
| 6 | 05/03/2017 | A | 2.9 | 0.045 |
| 7 | 07/22/2017 | A | 0.34 | 0.006 |
| 8 | 09/13/2017 | A | 5.35 | 0.005 |
| 9 | 09/20/2017 | A | 20.17 | 0.009 |
| 10 | 09/28/2017 | B | 5.1 | 0 |
| 11 | 10/18/2017 | B | 0.21 | 0.006 |
| 12 | 10/30/2017 | A | 0.08 | 0.029 |
| 13 | 11/17/2017 | B | 2.04 | 0.12 |
| 14 | 11/27/2017 | B | 22.7 | 4 |
| 15 | 12/14/2017 | B | 0.07 | 0.24 |
| 1 | 12/13/2016 | A | 4.9 | 42.5 |
| 2 | 12/16/2016 | A | 21.8 | 0.17 |
| 3 | 12/23/2016 | A | 32.5 | 22.9 |
| 4 | 01/05/2017 | A | 17.58 | 1.9 |
| 5 | 02/14/2017 | A | 2.25 | 0.5 |
| 6 | 02/24/2017 | A | 0.87 | 2.03 |
| 7 | 03/16/2017 | A | 20.1 | 30 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caballero, I.; Stumpf, R.P. Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission. Remote Sens. 2020, 12, 451. https://doi.org/10.3390/rs12030451
Caballero I, Stumpf RP. Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission. Remote Sensing. 2020; 12(3):451. https://doi.org/10.3390/rs12030451
Chicago/Turabian StyleCaballero, Isabel, and Richard P. Stumpf. 2020. "Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission" Remote Sensing 12, no. 3: 451. https://doi.org/10.3390/rs12030451
APA StyleCaballero, I., & Stumpf, R. P. (2020). Towards Routine Mapping of Shallow Bathymetry in Environments with Variable Turbidity: Contribution of Sentinel-2A/B Satellites Mission. Remote Sensing, 12(3), 451. https://doi.org/10.3390/rs12030451