Parameter Optimization for Uncertainty Reduction and Simulation Improvement of Hydrological Modeling


 , ,
, ,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Model Description
2.3. Model Input and Setup
2.4. Model Calibration/Validation and Uncertainty Analysis
2.4.1. SUFI-2
2.4.2. PSO
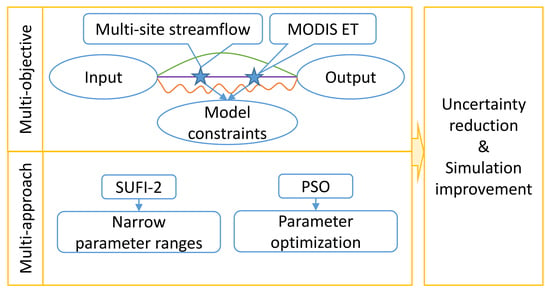
2.4.3. SUFI-2 and PSO Combination and Scenario Setting
2.4.4. Evaluation Criteria
- For sensitivity analysis, the parameter with the greatest absolute value of t-stat and smaller p-value was regarded to be more sensitive. The t-stat measured the parameter sensitivity ranks, and a greater absolute value indicated a more sensitive parameter. The p-value represented the significance of sensitivity; p ≤ 0.05 means the parameters were significantly sensitive to the model simulations, and there was no statistical significance when the p-value 0.05.
- We used “*” to represent the operational complexity, and each “*” means manually adjusting parameter ranges once (Table 4).
- The values of parameters should be in reasonable ranges to ensure the reasonability of a parameter.
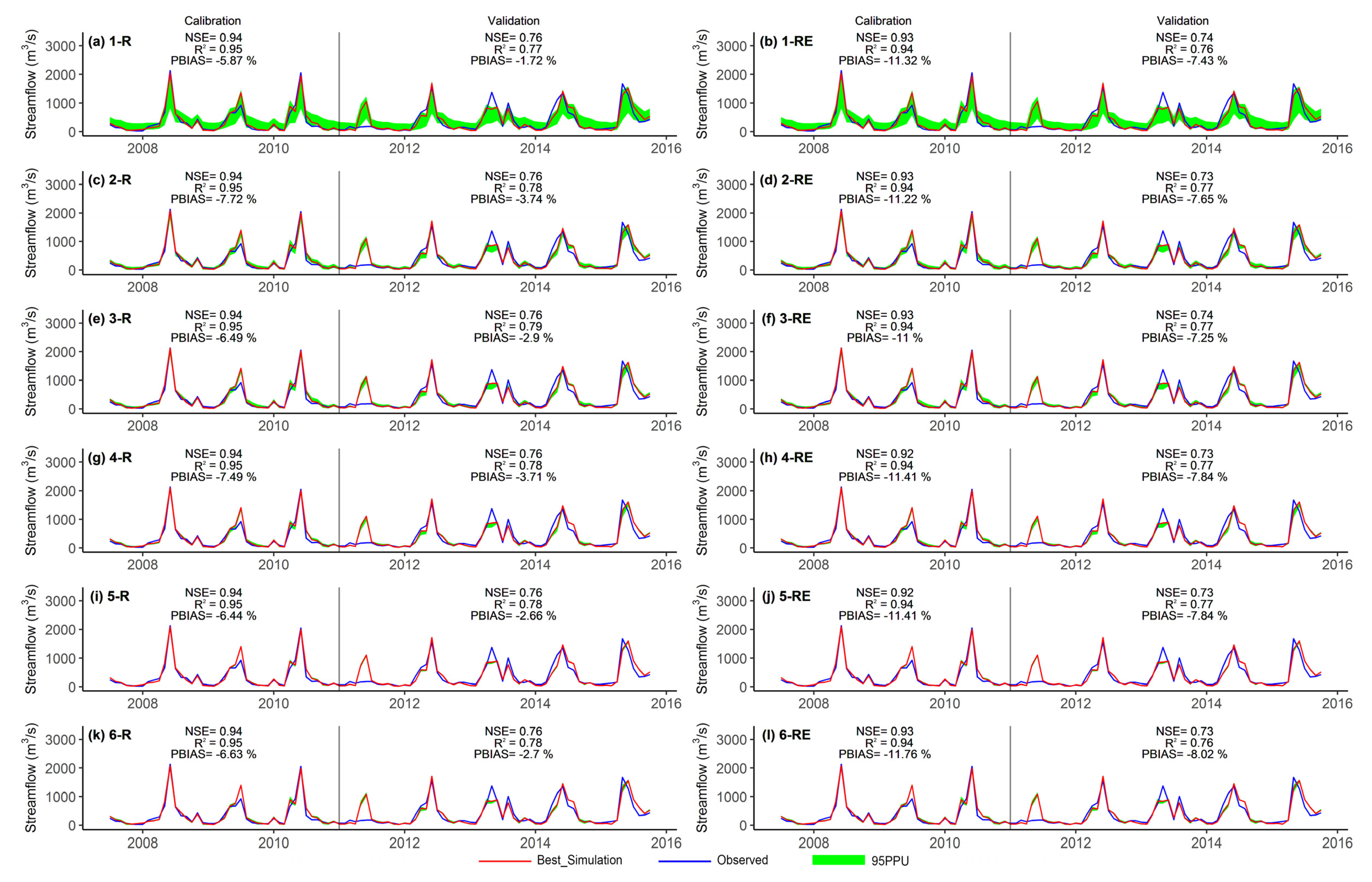
- NSE was set as the objective function to quantify the goodness of fit. Moreover, R2 and PBIAS were used to describe the parallelism and deviation between simulations and observations.
- The width of 95PPU indicated modeling uncertainty, and a narrower band means less uncertainty.
- R-factor is the relative width of 95PPU, and P-factor is the percentage of observation data points bracketed by the 95PPU. The ideal situation is that R-factor is close to 0, and P-factor is close to 1 [52], indicating the lowest uncertainty and highest accuracy.
3. Results
3.1. Parameter Sensitivity
3.2. Model Performance
3.2.1. Streamflow
3.2.2. ET
3.3. Modeling Uncertainty Analysis
4. Discussion
4.1. Approaches for Model Calibration and Uncertainty Analysis
4.1.1. Effects on Simulations
4.1.2. Effects on Parameter Ranges
4.2. Single-Objective and Bi-Objective Model Calibration and Uncertainty Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Measurements for Model Performance Evaluation
Appendix A.1. NSE
Appendix A.2. R2
Appendix A.3. PBIAS
References
- Arnold, J.G.; Srinivasan, R.; Muttiah, R.S.; Williams, J.R. Large area hydrologic modeling and assessment part I: Model development. J. Am. Water Resour. Assoc. 1998, 34, 73–89. [Google Scholar] [CrossRef]
- Matott, L.S.; Babendreier, J.E.; Purucker, S.T. Evaluating uncertainty in integrated environmental models: A review of concepts and tools. Water Resour. Res. 2009, 45, W06421. [Google Scholar] [CrossRef]
- Rajib, A.; Evenson, G.R.; Golden, H.E.; Lane, C.R. Hydrologic model predictability improves with spatially explicit calibration using remotely sensed evapotranspiration and biophysical parameters. J. Hydrol. 2018, 567, 668–683. [Google Scholar] [CrossRef]
- Wambura, F.J.; Dietrich, O.; Lischeid, G. Improving a distributed hydrological model using evapotranspiration-related boundary conditions as additional constraints in a data-scarce river basin. Hydrol. Process. 2018, 32, 759–775. [Google Scholar] [CrossRef]
- Beven, K. A manifesto for the equifinality thesis. J. Hydrol. 2006, 320, 18–36. [Google Scholar] [CrossRef]
- Guzman, J.A.; Shirmohammadi, A.; Sadeghi, A.M.; Wang, X.; Chu, M.L.; Jha, M.K.; Parajuli, P.B.; Daren Harmel, R.; Khare, Y.P.; Hernandez, J.E. Uncertainty Considerations in Calibration and Validation of Hydrologic and Water Quality Models. Trans. Asabe 2015, 58, 1745–1762. [Google Scholar] [CrossRef]
- Tolson, B.A.; Shoemaker, C.A. Efficient prediction uncertainty approximation in the calibration of environmental simulation models. Water Resour. Res. 2008, 44, W04411. [Google Scholar] [CrossRef]
- Cao, W.; Bowden, W.B.; Davie, T.; Fenemor, A. Multi-variable and multi-site calibration and validation of SWAT in a large mountainous catchment with high spatial variability. Hydrol. Process. 2006, 20, 1057–1073. [Google Scholar] [CrossRef]
- Qiao, L.; Herrmann, R.B.; Pan, Z. Parameter Uncertainty Reduction for SWAT Using Grace, Streamflow, and Groundwater Table Data for Lower Missouri River Basin1. J. Am. Water Resour. Assoc. 2013, 49, 343–358. [Google Scholar] [CrossRef]
- Silvestro, F.; Gabellani, S.; Rudari, R.; Delogu, F.; Laiolo, P.; Boni, G. Uncertainty reduction and parameters estimation of a~distributed hydrological model with ground and remote sensing data. Hydrol. Earth Syst. Sci. 2015, 11, 1727–1751. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S. Improvement of the R-SWAT-FME framework to support multiple variables and multi-objective functions. Sci. Total Environ. 2014, 466–467, 455–466. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Reichert, P.; Abbaspour, K.C. Bayesian uncertainty analysis in distributed hydrologic modeling: A case study in the Thur River basin (Switzerland). Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Clark, M.P.; Kavetski, D.; Fenicia, F. Pursuing the method of multiple working hypotheses for hydrological modeling. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef]
- Raje, D.; Krishnan, R. Bayesian parameter uncertainty modeling in a macroscale hydrologic model and its impact on Indian river basin hydrology under climate change. Water Resour. Res. 2012, 48, W08522. [Google Scholar] [CrossRef]
- Zhao, F.; Wu, Y.; Qiu, L.; Sun, Y.; Sun, L.; Li, Q.; Niu, J.; Wang, G. Parameter uncertainty analysis of the SWAT model in a mountain-loess transitional watershed on the Chinese Loess Plateau. Water 2018, 10, 690. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S.; Huang, Z.; Yan, W. Parameter optimization, sensitivity, and uncertainty analysis of an ecosystem model at a forest flux tower site in the United States. J. Adv. Modeling Earth Syst. 2014, 6, 405–419. [Google Scholar] [CrossRef]
- Bárdossy, A.; Singh, S.K. Robust estimation of hydrological model parameters. Hydrol. Earth Syst. Sci. 2008, 12, 1273–1283. [Google Scholar] [CrossRef]
- Khoi, D.N.; Thom, V.T. Parameter uncertainty analysis for simulating streamflow in a river catchment of Vietnam. Glob. Ecol. Conserv. 2015, 4, 538–548. [Google Scholar] [CrossRef]
- Paul, M.; Negahban-Azar, M. Sensitivity and uncertainty analysis for streamflow prediction using multiple optimization algorithms and objective functions: San Joaquin Watershed, California. Modeling Earth Syst. Environ. 2018, 4, 1509–1525. [Google Scholar] [CrossRef]
- Rajib, A.; Merwade, V.; Yu, Z. Rationale and Efficacy of Assimilating Remotely Sensed Potential Evapotranspiration for Reduced Uncertainty of Hydrologic Models. Water Resour. Res. 2018, 54, 4615–4637. [Google Scholar] [CrossRef]
- Beven, K.; Binley, A. The future of distributed models: Model calibration and uncertainty prediction. Hydrol. Process. 1992, 6, 279–298. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; Johnson, C.A.; Genuchten, M.T.V. Estimating Uncertain Flow and Transport Parameters Using A Sequential Uncertainty Fitting Procedure. Vadose Zone J. 2004, 3, 1340–1352. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization; IEEE: Perth, Australia, 1995; Volume 1944, pp. 1942–1948. [Google Scholar] [CrossRef]
- Sellami, H.; Jeunesse, I.L.; Benabdallah, S.; Vanclooster, M. Parameter and rating curve uncertainty propagation analysis of the SWAT model for two small Mediterranean catchments. Int. Assoc. Sci. Hydrol. Bull. 2013, 58, 1635–1657. [Google Scholar] [CrossRef]
- Zhang, J.; Qiannan, L.; Binbin, G. The comparative study of multi-site uncertainty evaluation method based on SWAT model. Hydrol. Process. 2015, 29, 2994–3009. [Google Scholar] [CrossRef]
- Setegn, S.G.; Srinivasan, R.; Melesse, A.M.; Dargahi, B. SWAT model application and prediction uncertainty analysis in the Lake Tana Basin, Ethiopia. Hydrol. Process. 2010, 24, 357–367. [Google Scholar] [CrossRef]
- Rientjes, T.H.M.; Muthuwatta, L.P.; Bos, M.G.; Booij, M.J.; Bhatti, H.A. Multi-variable calibration of a semi-distributed hydrological model using streamflow data and satellite-based evapotranspiration. J. Hydrol. 2013, 505, 276–290. [Google Scholar] [CrossRef]
- Singh, S.K.; Bárdossy, A. Calibration of hydrological models on hydrologically unusual events. Adv. Water Resour. 2012, 38, 81–91. [Google Scholar] [CrossRef]
- Tobin, K.J.; Bennett, M.E. Constraining SWAT Calibration with Remotely Sensed Evapotranspiration Data. J. Am. Water Resour. Assoc. 2017, 53, 593–604. [Google Scholar] [CrossRef]
- Tuo, Y.; Marcolini, G.; Disse, M.; Chiogna, G. A multi-objective approach to improve SWAT model calibration in alpine catchments. J. Hydrol. 2018, 559, 347–360. [Google Scholar] [CrossRef]
- Bekele, E.G.; Nicklow, J.W. Multi-objective automatic calibration of SWAT using NSGA-II. J. Hydrol. 2007, 341, 165–176. [Google Scholar] [CrossRef]
- Chiang, L.-C.; Yuan, Y.; Mehaffey, M.; Jackson, M.; Chaubey, I. Assessing SWAT’s performance in the Kaskaskia River watershed as influenced by the number of calibration stations used. Hydrol. Process. 2014, 28, 676–687. [Google Scholar] [CrossRef]
- Rajib, A.; Merwade, V.; Yu, Z. Multi-objective calibration of a hydrologic model using spatially distributed remotely sensed/in-situ soil moisture. J. Hydrol. 2016, 536, 192–207. [Google Scholar] [CrossRef]
- Parajuli, P.B.; Jayakody, P.; Ying, O. Evaluation of Using Remote Sensing Evapotranspiration Data in SWAT. Water Resour. Manag. 2018, 32, 1–12. [Google Scholar] [CrossRef]
- Chien, H.; Yeh, P.J.F.; Knouft, J.H. Modeling the potential impacts of climate change on streamflow in agricultural watersheds of the Midwestern United States. J. Hydrol. 2013, 491, 73–88. [Google Scholar] [CrossRef]
- Zhou, X.; Huang, W.; Wang, W. Analysis of runoff variation characteristics in the Guijiang River Basin (in Chinese). Guangxi Water Resour. Hydropower Eng. 2008, 1, 22–25. [Google Scholar]
- Yang, L.; Sun, X.; Wu, Y. Analysis of Hydrological Characteristics of Guijiang River Basin (in Chinese). Guangdong Water Resour. Hydropower 2017, 12, 14–17. [Google Scholar]
- Arnold, J.G.; Fohrer, N. SWAT2000: Current capabilities and research opportunities in applied watershed modelling. Hydrol. Process. 2005, 19, 563–572. [Google Scholar] [CrossRef]
- Gassman, P.W.; Reyes, M.R.; Green, C.H.; Arnold, J.G. The Soil and Water Assessment Tool: Historical Development, Applications, and Future Research Directions. Trans. Asabe 2007, 50, 1211–1250. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S. Modeling of land use and reservoir effects on nonpoint source pollution in a highly agricultural basin. J. Environ. Monit. JEM 2012, 14, 2350–2361. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, Y.; Sivakumar, B.; Mu, X.; Zhao, F.; Sun, P.; Sun, Y.; Qiu, L.; Chen, J.; Meng, X.; et al. Climate change-induced drought evolution over the past 50 years in the southern Chinese Loess Plateau. Environ. Model. Softw. 2019, 122, 104519. [Google Scholar] [CrossRef]
- Wu, Y.; Chen, J. Investigating the effects of point source and nonpoint source pollution on the water quality of the East River (Dongjiang) in South China. Ecol. Indic. 2013, 32, 294–304. [Google Scholar] [CrossRef]
- Zhao, F.; Wu, Y.; Yao, Y.; Sun, K.; Zhang, X.; Winowiecki, L.; Vågen, T.-G.; Xu, J.; Qiu, L.; Sun, P.; et al. Predicting the climate change impacts on water-carbon coupling cycles for a loess hilly-gully watershed. J. Hydrol. 2020, 581, 124388. [Google Scholar] [CrossRef]
- Sun, P.; Wu, Y.; Wei, X.; Sivakumar, B.; Qiu, L.; Mu, X.; Chen, J.; Gao, J. Quantifying the contributions of climate variation, land use change, and engineering measures for dramatic reduction in streamflow and sediment in a typical loess watershed, China. Ecol. Eng. 2020, 142, 105611. [Google Scholar] [CrossRef]
- Arnold, J.G.; Kiniry, J.R.; Srinivasan, R.; Williams, J.R.; Haney, E.B.; Neitsch, S.L. Soil & Water Assessment Tool Input/Output Documentation Version 2012; Texas Water Resources Institute: College Station, TX, USA, 2012. [Google Scholar]
- Zhao, F.; Wu, Y.; Wang, L.; Liu, S.; Wei, X.; Xiao, J.; Qiu, L.; Sun, P. Multi-environmental impacts of biofuel production in the U.S. Corn Belt: A coupled hydro-biogeochemical modeling approach. J. Clean. Prod. 2020, 251, 119561. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S. Automating calibration, sensitivity and uncertainty analysis of complex models using the R package Flexible Modeling Environment (FME): SWAT as an example. Environ. Model. Softw. 2012, 31, 99–109. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, S.; Abdul-Aziz, O.I. Hydrological effects of the increased CO2 and climate change in the Upper Mississippi River Basin using a modified SWAT. Clim. Chang. 2012, 110, 977–1003. [Google Scholar] [CrossRef]
- Qiu, L.; Wu, Y.; Wang, L.; Hui, Y.; Lei, X.; Liao, W.; Meng, X. Spatiotemporal response of the water cycle to land use conversions in a typical hilly-gully basin on the Loess Plateau, China. Hydrol. Earth Syst. Sci. 2017, 21, 6485–6499. [Google Scholar] [CrossRef]
- Price, K.; Purucker, S.T.; Kraemer, S.R.; Babendreier, J.E. Tradeoffs among watershed model calibration targets for parameter estimation. Water Resour. Res. 2012, 48, W10542. [Google Scholar] [CrossRef]
- Wellen, C.; Arhonditsis, G.B.; Long, T.; Boyd, D. Quantifying the uncertainty of nonpoint source attribution in distributed water quality models: A Bayesian assessment of SWAT’s sediment export predictions. J. Hydrol. 2014, 519, 3353–3368. [Google Scholar] [CrossRef]
- Odusanya, A.E.; Mehdi, B.; Schürz, C.; Oke, A.O.; Awokola, O.S.; Awomeso, J.A.; Adejuwon, J.O.; Schulz, K. Multi-site calibration and validation of SWAT with satellite-based evapotranspiration in a data-sparse catchment in southwestern Nigeria. Hydrol. Earth Syst. Sci. 2019, 23, 1113–1144. [Google Scholar] [CrossRef]
- Sun, C.; Ren, L. Assessment of surface water resources and evapotranspiration in the Haihe River basin of China using SWAT model. Hydrol. Process. 2013, 27, 1200–1222. [Google Scholar] [CrossRef]
- Zhou, J.; Liu, Y.; Guo, H.; He, D. Combining the SWAT model with sequential uncertainty fitting algorithm for streamflow prediction and uncertainty analysis for the Lake Dianchi Basin, China. Hydrol. Process. 2014, 28, 521–533. [Google Scholar] [CrossRef]
- Nash, J.; Sutcliffe, J. River flow forecasting through conceptual models part I. A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Yang, J.; Reichert, P.; Abbaspour, K.C.; Xia, J.; Yang, H. Comparing uncertainty analysis techniques for a SWAT application to the Chaohe Basin in China. J. Hydrol. 2008, 358, 1–23. [Google Scholar] [CrossRef]
- Yang, Y.; Ying, T.; Zeng, J. A Quadratic Particle Swarm Optimization and its Self-Adaptive Parameters. In Proceedings of the World Congress on Intelligent Control & Automation, Dalian, China, 21–23 June 2006. [Google Scholar]
- Kennedy, J.; Eberhart, R.C.; Shi, Y. Chapter one—Models and Concepts of Life and Intelligence. In Swarm Intelligence; Kennedy, J., Eberhart, R.C., Shi, Y., Eds.; Morgan Kaufmann: San Francisco, CA, USA, 2001; pp. 3–34. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Hoonji, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Zheng, Y.; Keller, A.A. Uncertainty assessment in watershed-scale water quality modeling and management: 1. Framework and application of generalized likelihood uncertainty estimation (GLUE) approach. Water Resour. Res. 2007, 43, W08407. [Google Scholar] [CrossRef]
- Long, D.; Longuevergne, L.; Scanlon, B.R. Uncertainty in evapotranspiration from land surface modeling, remote sensing, and GRACE satellites. Water Resour. Res. 2014, 50, 1131–1151. [Google Scholar] [CrossRef]
- Shafii, M.; Tolson, B.A. Optimizing hydrological consistency by incorporating hydrological signatures into model calibration objectives. Water Resour. Res. 2015, 51, 3796–3814. [Google Scholar] [CrossRef]
- Abbaspour, K.C.; Yang, J.; Maximov, I.; Siber, R.; Bogner, K.; Mieleitner, J.; Zobrist, J.; Srinivasan, R. Modelling hydrology and water quality in the pre-alpine/alpine Thur watershed using SWAT. J. Hydrol. 2007, 333, 413–430. [Google Scholar] [CrossRef]
- Iverach, C.P.; Cendón, D.I.; Meredith, K.T.; Wilcken, K.M.; Hankin, S.I.; Andersen, M.S.; Kelly, B.F.J. A multi-tracer approach to constraining artesian groundwater discharge into an alluvial aquifer. Hydrol. Earth Syst. Sci. 2017, 21, 5953–5969. [Google Scholar] [CrossRef]
- Krishnan, N.; Raj, C.; Chaubey, I.; Sudheer, K.P. Parameter estimation of SWAT and quantification of consequent confidence bands of model simulations. Environ. Earth Sci. 2018, 77, 470. [Google Scholar] [CrossRef]
- Pfannerstill, M.; Bieger, K.; Guse, B.; Bosch, D.D.; Fohrer, N.; Arnold, J.G. How to Constrain Multi-Objective Calibrations of the SWAT Model Using Water Balance Components. J. Am. Water Resour. Assoc. 2017, 53, 532–546. [Google Scholar] [CrossRef]
- Garcia, F.; Folton, N.; Oudin, L. Which objective function to calibrate rainfall–runoff models for low-flow index simulations? Hydrol. Sci. J. 2017, 62, 1149–1166. [Google Scholar] [CrossRef]
- Zhao, F.; Wu, Y.; Qiu, L.; Sivakumar, B.; Zhang, F.; Sun, Y.; Sun, L.; Li, Q.; Voinov, A. Spatiotemporal features of the hydro-biogeochemical cycles in a typical loess gully watershed. Ecol. Indic. 2018, 91, 542–554. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter names | Description | Initial Range |
|---|---|---|
| r_CN2.mgt | SCS curve number at moisture condition II | [−0.2, 0.2] |
| v_ALPHA_BF.gw | Base flow recession constant | [0.001, 0.05] |
| v_CH_K2.rte | Effective hydraulic conductivity in main channel alluvium | [0, 150] |
| r_SOL_AWC.sol | Available water capacity of the soil layer | [−0.2, 0.2] |
| r_SOL_K.sol | Saturated hydraulic conductivity | [−0.2, 0.2] |
| v_ESCO.hru | Soil evaporation compensation factor | [0, 1] |
| v_SURLAG.bsn | Surface runoff lag time | [0.1, 4] |
| Approach Number | Approach | Scenario Code | Description |
|---|---|---|---|
| No.1 | SUFI-2 2000 | 1-R | Run SUFI-2 2000 times, calibrate with streamflow only |
| 1-RE | Run SUFI-2 2000 times, calibrate with streamflow and ET | ||
| No.2 | PSO 2000 | 2-R | Run PSO 2000 times, calibrate with streamflow only |
| 2-RE | Run PSO 2000 times, calibrate with streamflow and ET | ||
| No.3 | SUFI-2 1000+PSO 1000 | 3-R | Run SUFI-2 1000 times, then PSO 1000 times, calibrate with streamflow only |
| 3-RE | Run SUFI-2 1000 times, then PSO 1000 times, calibrate with streamflow and ET | ||
| No.4 | SUFI-2 500*2+PSO 1000 | 4-R | Run SUFI-2 500 times for two rounds, then PSO 1000 times, calibrate with streamflow only |
| 4-RE | Run SUFI-2 500 times for two rounds, then PSO 1000 times, calibrate with streamflow and ET | ||
| No.5 | SUFI-2 500*3+PSO 500 | 5-R | Run SUFI-2 500 times for three rounds, then PSO 500 times, calibrate with streamflow only |
| 5-RE | Run SUFI-2 500 times for three rounds, then PSO 500 times, calibrate with streamflow and ET | ||
| No.6 | SUFI-2 500*4 | 6-R | Run SUFI-2 500 times for four rounds, calibrate with streamflow only |
| 6-RE | Run SUFI-2 500 times for four rounds, calibrate with streamflow and ET |
| 1-R | 1-RE | 2-R | 2-RE | |||||||||
| Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | |
| CH_K2 | 1 | −166.22 | 0.00 | 1 | −93.63 | 0.00 | 1 | −26.17 | 0.00 | 1 | −38.32 | 0.00 |
| CN2 | 2 | 61.50 | 0.00 | 2 | 26.27 | 0.00 | 2 | 16.43 | 0.00 | 2 | 17.93 | 0.00 |
| ALPHA_BF | 3 | 18.33 | 0.00 | 4 | 10.73 | 0.00 | 3 | 11.09 | 0.00 | 3 | 6.76 | 0.00 |
| SOL_K | 4 | −3.24 | 0.00 | 5 | −1.76 | 0.08 | 7 | −0.93 | 0.35 | 5 | −2.72 | 0.01 |
| ESCO | 5 | 2.89 | 0.00 | 3 | −11.11 | 0.00 | 4 | 7.46 | 0.00 | 4 | 5.80 | 0.00 |
| SURLAG | 6 | −1.29 | 0.20 | 6 | −0.60 | 0.55 | 5 | 3.10 | 0.00 | 7 | −0.65 | 0.52 |
| SOL_AWC | 7 | −0.54 | 0.59 | 7 | 0.26 | 0.79 | 6 | −1.09 | 0.28 | 6 | −1.86 | 0.06 |
| 3-R | 3-RE | 4-R | 4-RE | |||||||||
| Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | |
| CH_K2 | 1 | −20.48 | 0.00 | 1 | −23.74 | 0.00 | 2 | −8.78 | 0.00 | 2 | −22.35 | 0.00 |
| CN2 | 3 | 10.32 | 0.00 | 3 | 9.05 | 0.00 | 4 | 3.27 | 0.00 | 3 | 11.74 | 0.00 |
| ALPHA_BF | 2 | 13.77 | 0.00 | 2 | 16.50 | 0.00 | 3 | 4.90 | 0.00 | 1 | 24.54 | 0.00 |
| SOL_K | 7 | 0.71 | 0.48 | 4 | −3.78 | 0.00 | 7 | 0.81 | 0.42 | 7 | 0.49 | 0.62 |
| ESCO | 4 | 10.31 | 0.00 | 5 | 3.00 | 0.00 | 1 | 11.01 | 0.00 | 4 | 4.65 | 0.00 |
| SURLAG | 6 | −1.61 | 0.11 | 7 | −1.03 | 0.30 | 5 | 2.81 | 0.00 | 5 | −1.62 | 0.11 |
| SOL_AWC | 5 | 1.99 | 0.05 | 6 | −1.03 | 0.30 | 6 | 0.83 | 0.40 | 6 | 1.42 | 0.16 |
| 5-R | 5-RE | 6-R | 6-RE | |||||||||
| Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | Rank | t-Stat | p-Value | |
| CH_K2 | 7 | −1.21 | 0.23 | 3 | −3.90 | 0.00 | 1 | −16.11 | 0.00 | 2 | −9.79 | 0.00 |
| CN2 | 3 | −2.47 | 0.01 | 5 | 1.96 | 0.05 | 4 | 2.79 | 0.01 | 6 | 0.81 | 0.42 |
| ALPHA_BF | 2 | 4.72 | 0.00 | 1 | 17.81 | 0.00 | 2 | 5.70 | 0.00 | 3 | 4.32 | 0.00 |
| SOL_K | 5 | 2.09 | 0.04 | 4 | −2.21 | 0.03 | 5 | −1.51 | 0.13 | 4 | −1.49 | 0.14 |
| ESCO | 1 | 10.14 | 0.00 | 2 | −8.67 | 0.00 | 3 | −2.87 | 0.00 | 1 | −21.68 | 0.00 |
| SURLAG | 4 | −2.26 | 0.02 | 6 | −1.88 | 0.06 | 6 | −0.90 | 0.37 | 7 | −0.79 | 0.43 |
| SOL_AWC | 6 | −1.69 | 0.09 | 7 | −0.08 | 0.93 | 7 | 0.81 | 0.42 | 5 | 1.43 | 0.15 |
| Scenario Code | Complexity | NSE (Optimal) | R-Factor | P-Factor |
|---|---|---|---|---|
| 1-R | * | 0.854 | 0.925 | 0.840 |
| 1-RE | * | 0.826 | 0.883 | 0.760 |
| 2-R | * | 0.857 | 0.335 | 0.705 |
| 2-RE | * | 0.828 | 0.300 | 0.633 |
| 3-R | ** | 0.862 | 0.270 | 0.630 |
| 3-RE | ** | 0.830 | 0.233 | 0.573 |
| 4-R | *** | 0.860 | 0.185 | 0.535 |
| 4-RE | *** | 0.829 | 0.177 | 0.503 |
| 5-R | **** | 0.859 | 0.085 | 0.375 |
| 5-RE | **** | 0.829 | 0.100 | 0.407 |
| 6-R | **** | 0.857 | 0.160 | 0.480 |
| 6-RE | **** | 0.827 | 0.197 | 0.517 |
| Scenario Code | CN2 | ALPHA_BF | CH_K2 | SOL_AWC | SOL_K | ESCO | SURLAG |
|---|---|---|---|---|---|---|---|
| 1-R | 0.04 (−0.2, 0.2) | 0.04 (0.001, 0.05) | 11.35 (−0.01, 150) | 0.02 (−0.2, 0.2) | −0.12 (−0.2, 0.2) | 0.03 (0, 1) | 0.98 (0.1, 4) |
| 1-RE | 0.02 (−0.2, 0.2) | 0.05 (0.001, 0.05) | 12.33 (−0.01, 150) | −0.13 (−0.2, 0.2) | −0.16 (−0.2, 0.2) | 0.64 (0, 1) | 0.14 (0.1, 4) |
| 2-R | 0.06 (−0.2, 0.2) | 0.07 (0.001, 0.05) | 17.51 (−0.01, 150) | 0.16 (−0.2, 0.2) | 0.19 (−0.2, 0.2) | 0.10 (0, 1) | 2.84 (0.1, 4) |
| 2-RE | 0.02 (−0.2, 0.2) | 0.09 (0.001, 0.05) | 18.56 (−0.01, 150) | −0.12 (−0.2, 0.2) | −0.36 (−0.2, 0.2) | 0.65 (0, 1) | −0.30 (0.1, 4) |
| 3-R | 0.05 (−0.07, 0.18) | 0.13 (0.02, 0.07) | 19.60 (−0.01, 82.92) | 0.10 (−0.11, 0.10) | 0.03 (−0.10, 0.10) | 0.03 (0, 0.62) | 2.80 (1.80, 4) |
| 3-RE | −0.01 (−0.09, 0.13) | 0.13 (0.02, 0.07) | 23.74 (−0.01, 81.94) | 0.03 (−0.06, 0.2) | −0.05 (−0.07, 0.20) | 0.65 (0.30, 0.91) | 1.21 (0.1, 2.36) |
| 4-R | 0.06 (−0.01, 0.13) | 0.10 (0.04, 0.06) | 20.81 (−0.01, 47.84) | −0.14 (−0.13, 0) | 0.05 (−0.12, 0.03) | 0.01 (0, 0.29) | 2.89 (1.80, 3.03) |
| 4-RE | −0.01 (−0.06, 0.09) | 0.10 (0.04, 0.06) | 16.26 (−0.01, 46.45) | −0.09 (−0.09, 0.02) | −0.02 (−0.12, 0.0) | 0.67 (0.47, 0.82) | 1.24 (0.28, 2.29) |
| 5-R | 0.05 (0.03, 0.10) | 0.08 (0.05, 0.06) | 16.11 (−0.01, 30.26) | −0.07 (−0.11, −0.04) | −0.10 (−0.12, −0.04) | 0.01 (0, 0.16) | 2.34 (2.14, 2.83) |
| 5-RE | −0.01 (−0.03, 0.05) | 0.10 (0.05, 0.06) | 16.26 (−0.01, 30.22) | −0.09 (−0.09, −0.03) | −0.02 (−0.12, −0.05) | 0.67 (0.58, 0.82) | 1.24 (0.093, 2.22) |
| 6-R | 0.05 (0.03, 0.10) | 0.06 (0.05, 0.06) | 14.67 (−0.01, 30.26) | −0.05 (−0.11, −0.04) | −0.07 (−0.12, −0.04) | 0.01 (0, 0.16) | 2.78 (2.14, 2.83) |
| 6-RE | 0.02 (−0.03, 0.05) | 0.06 (0.05, 0.06) | 14.53 (−0.01, 30.22) | −0.05 (−0.09, −0.03) | −0.11 (−0.12, −0.05) | 0.65 (0.58, 0.82) | 1.30 (0.09, 2.22) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hui, J.; Wu, Y.; Zhao, F.; Lei, X.; Sun, P.; Singh, S.K.; Liao, W.; Qiu, L.; Li, J. Parameter Optimization for Uncertainty Reduction and Simulation Improvement of Hydrological Modeling. Remote Sens. 2020, 12, 4069. https://doi.org/10.3390/rs12244069
Hui J, Wu Y, Zhao F, Lei X, Sun P, Singh SK, Liao W, Qiu L, Li J. Parameter Optimization for Uncertainty Reduction and Simulation Improvement of Hydrological Modeling. Remote Sensing. 2020; 12(24):4069. https://doi.org/10.3390/rs12244069
Chicago/Turabian StyleHui, Jinyu, Yiping Wu, Fubo Zhao, Xiaohui Lei, Pengcheng Sun, Shailesh Kumar Singh, Weihong Liao, Linjing Qiu, and Jiguang Li. 2020. "Parameter Optimization for Uncertainty Reduction and Simulation Improvement of Hydrological Modeling" Remote Sensing 12, no. 24: 4069. https://doi.org/10.3390/rs12244069
APA StyleHui, J., Wu, Y., Zhao, F., Lei, X., Sun, P., Singh, S. K., Liao, W., Qiu, L., & Li, J. (2020). Parameter Optimization for Uncertainty Reduction and Simulation Improvement of Hydrological Modeling. Remote Sensing, 12(24), 4069. https://doi.org/10.3390/rs12244069