Analytical Computation of the Spatial Resolution in GNSS-R and Experimental Validation at L1 and L5



Abstract
1. Introduction
2. Methodology
2.1. Review of Some Basic Principles of Electromagnetism
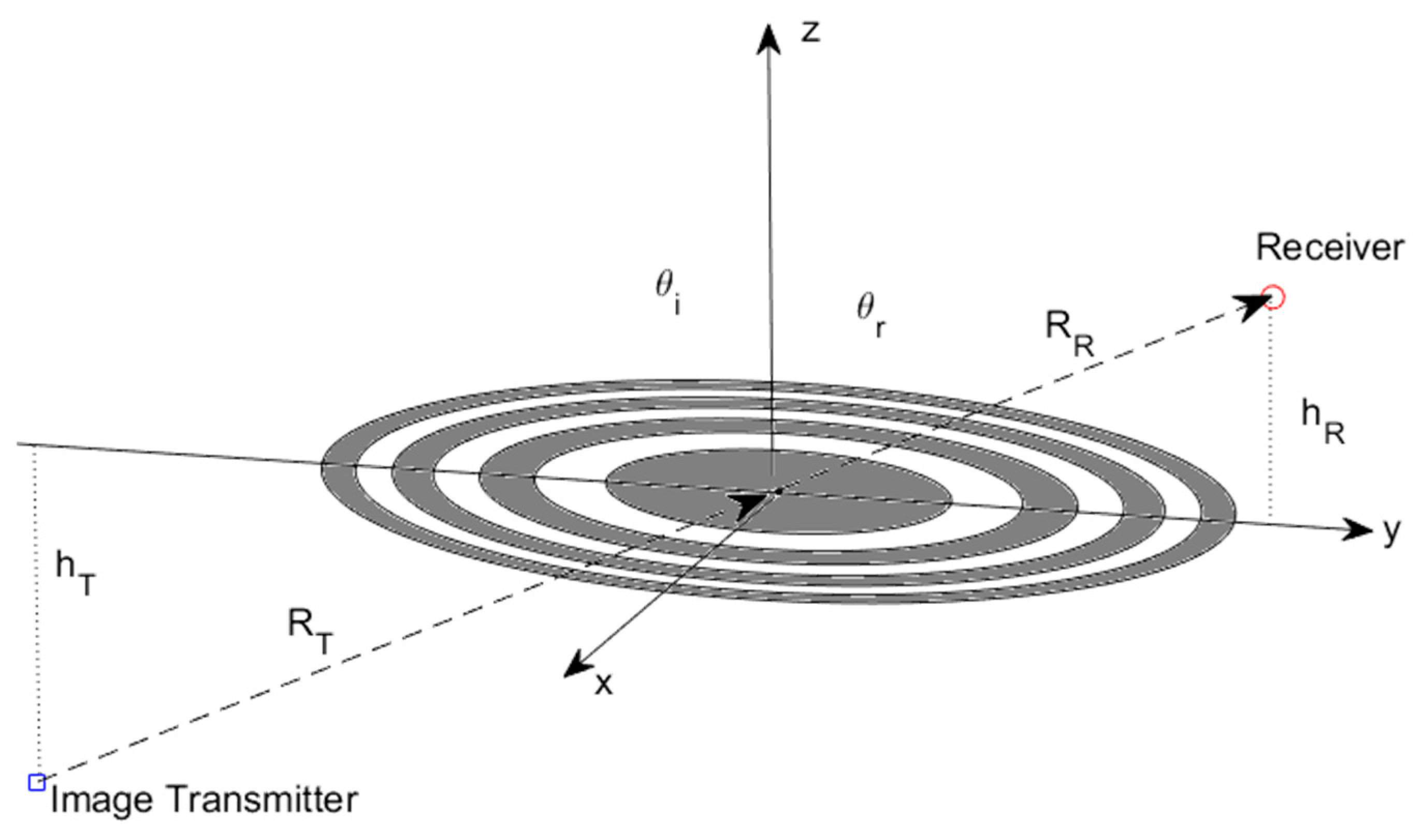
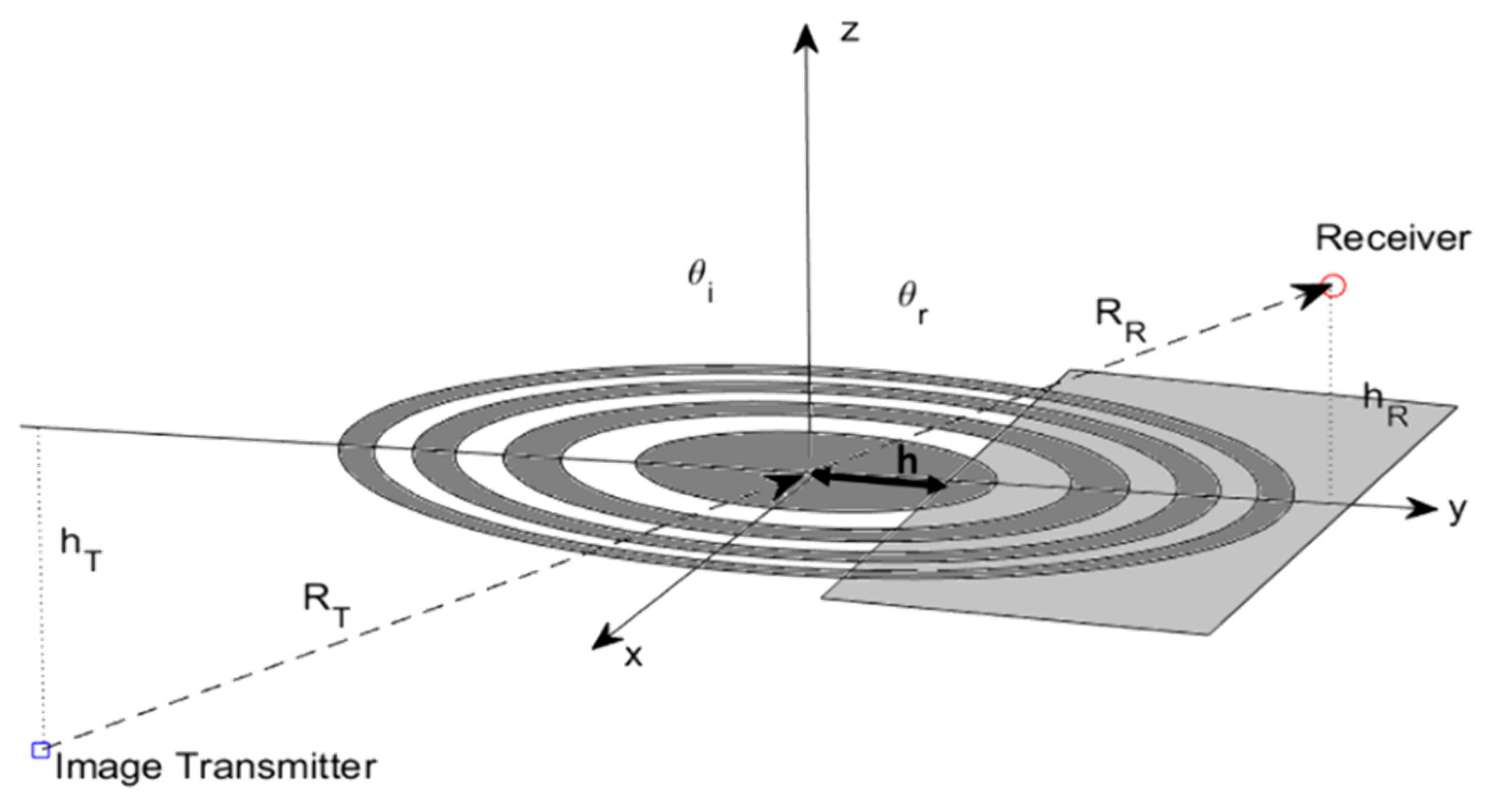
2.1.1. Principle of Equivalence and Image Theory
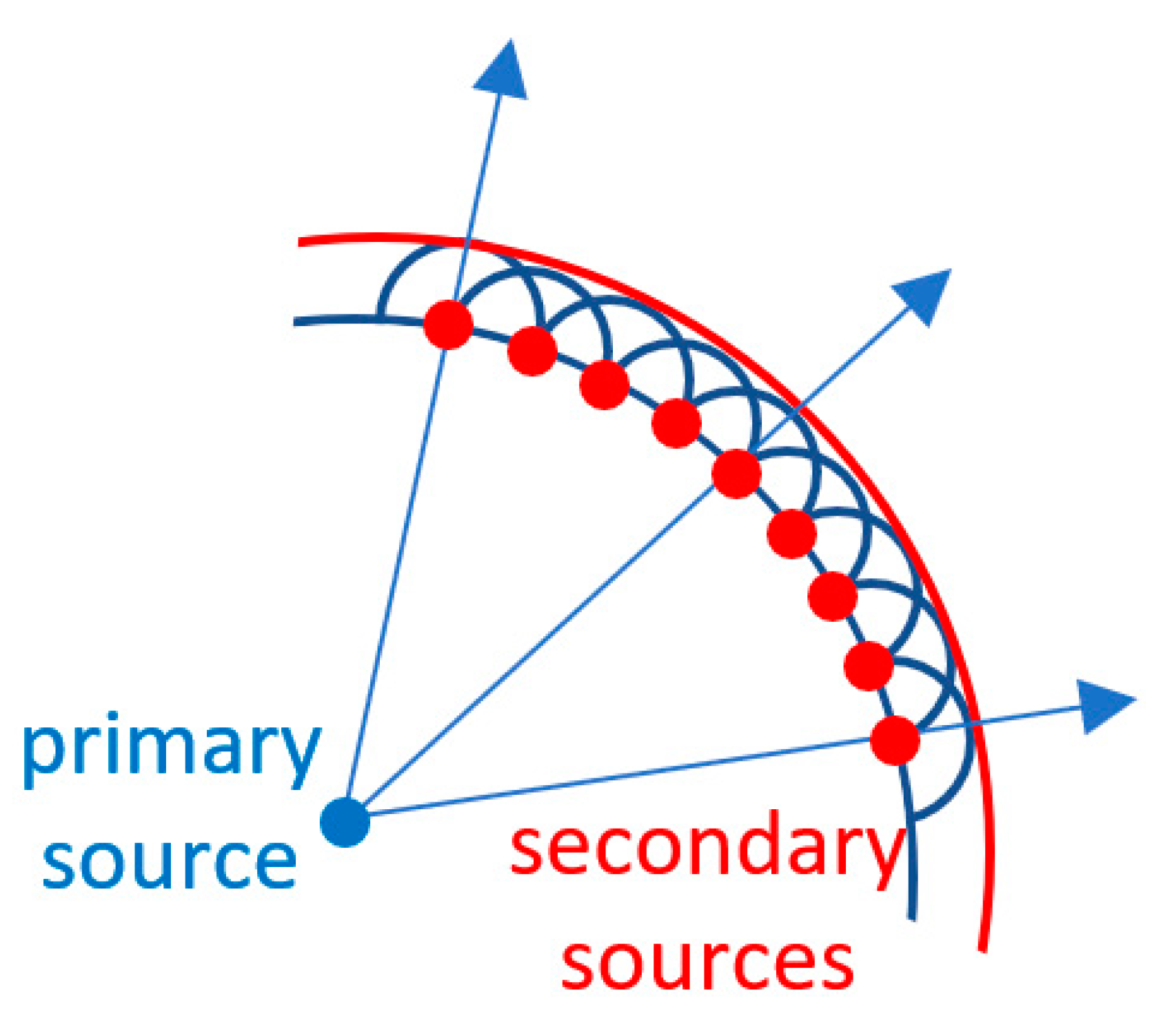
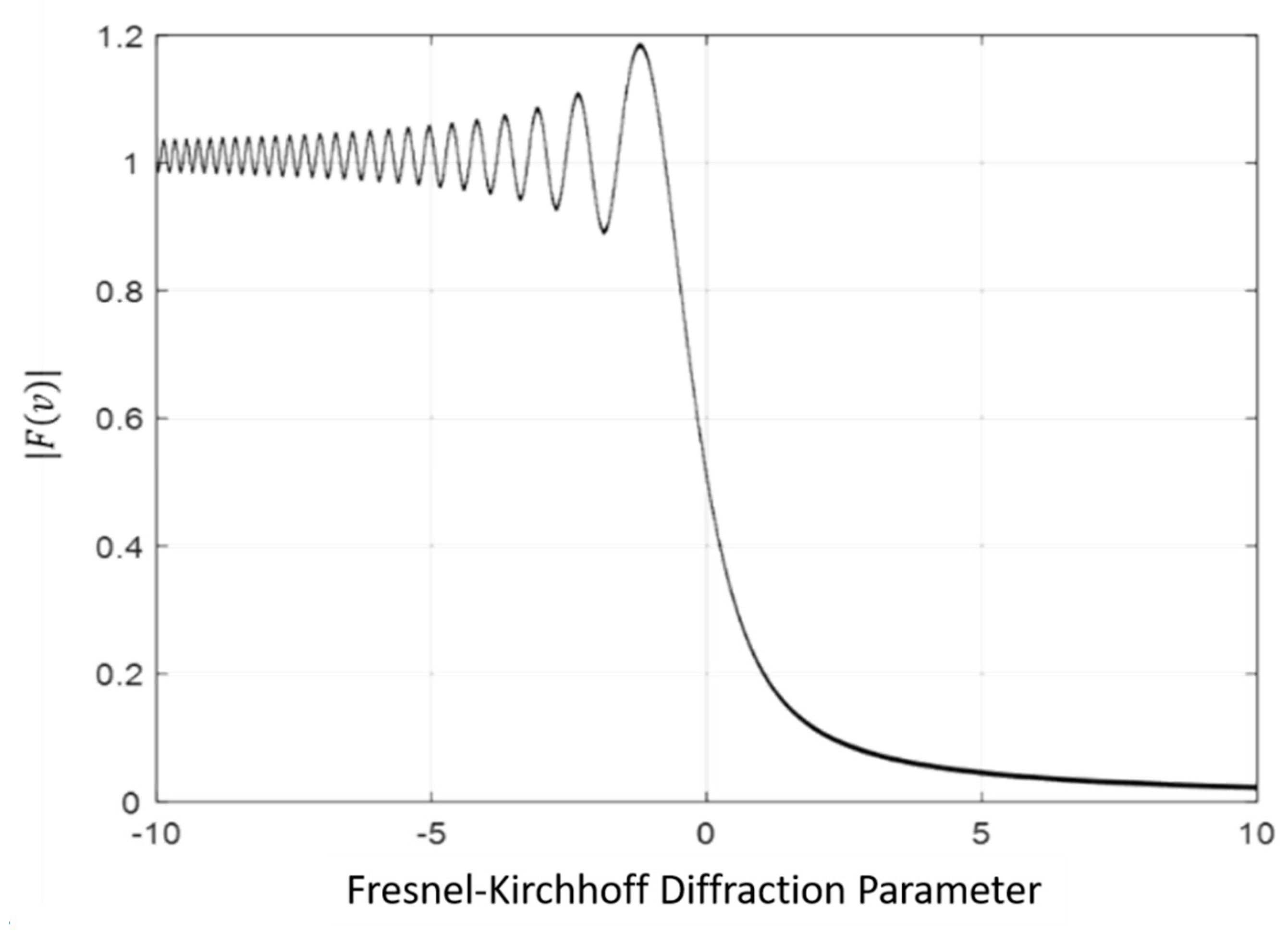
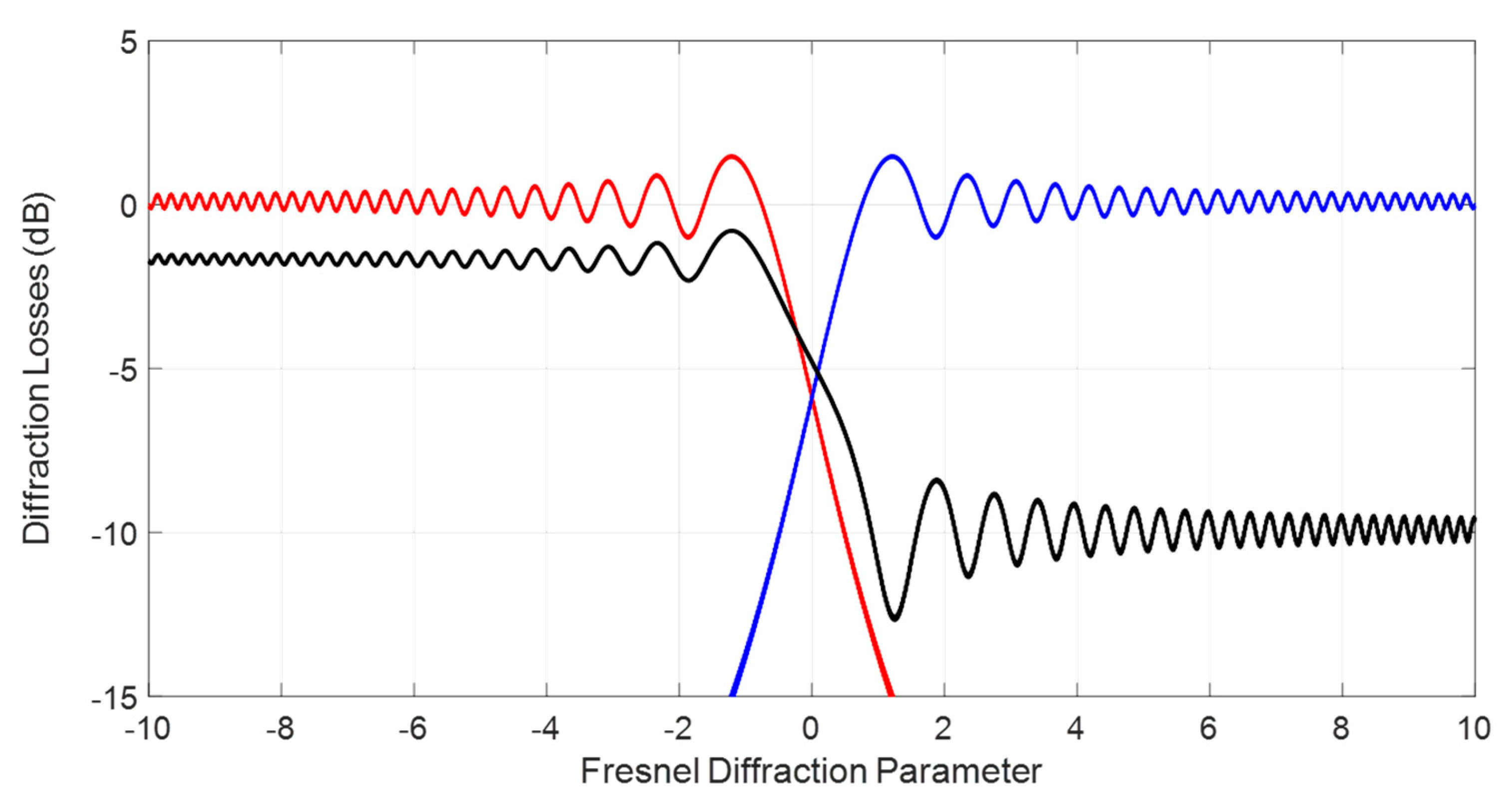
2.1.2. The Huygens Principle and Knife-Edge Diffraction
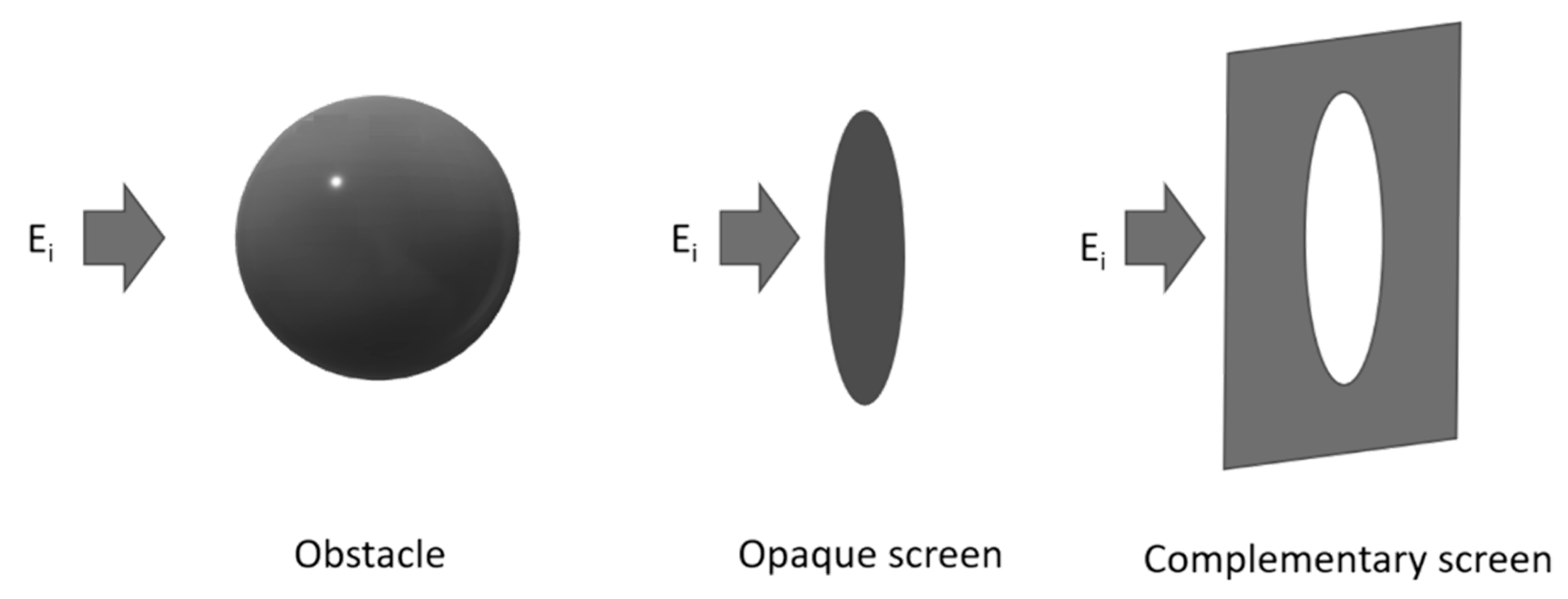
2.1.3. Babinet’s Principle
2.1.4. Principle of Superposition
2.2. Computation of the Electric Field Scattered by the Discontinuity between Two Media
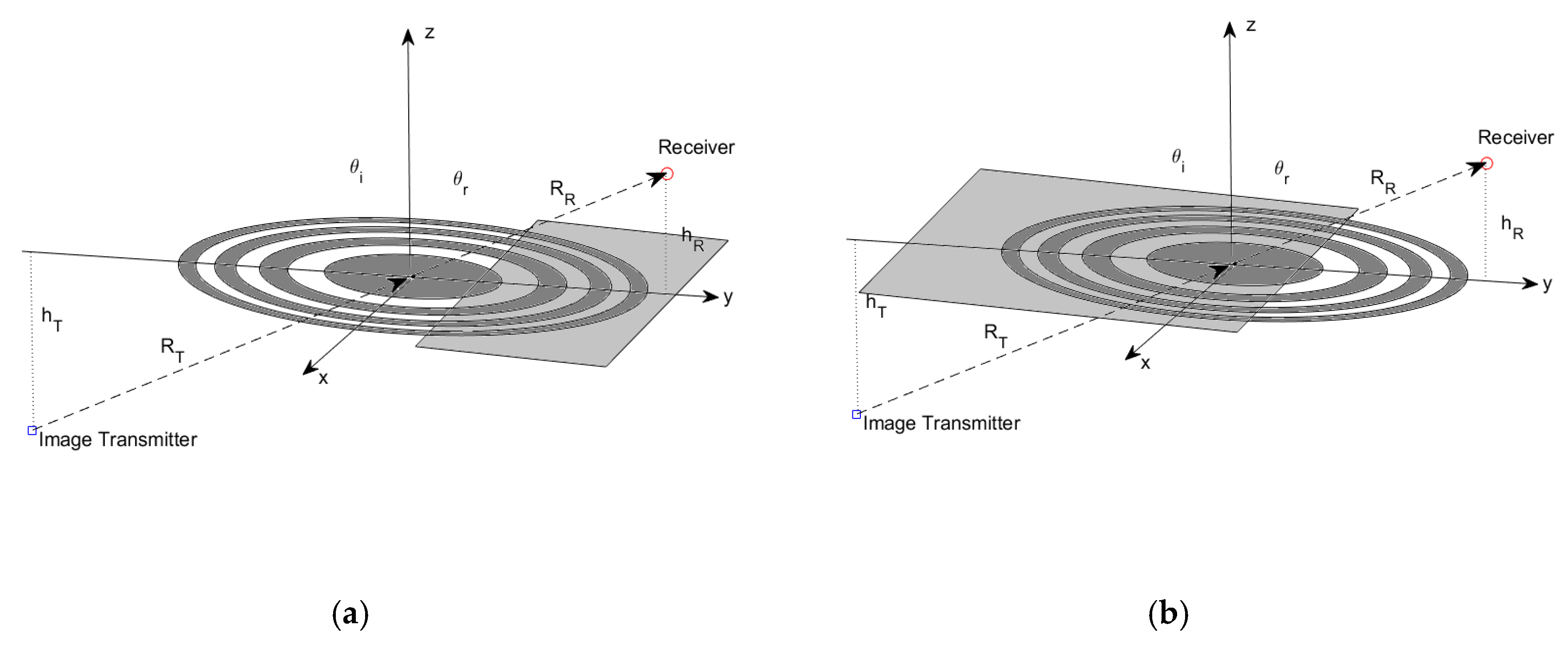
- The extension of the Fresnel reflection zones is small enough (a few hundred meters from a low Earth orbiter) so that the variations of the local incidence angle can be neglected over a few Fresnel zones;
- The plane z = 0 is composed of two flat half-planes of different materials, and thus exhibiting different reflection coefficients; and
- The transmission coefficient for the wave emitted by the image transmitter (Figure 5) is equal to the reflection coefficient evaluated at the local incidence angle at the origin.
3. Results
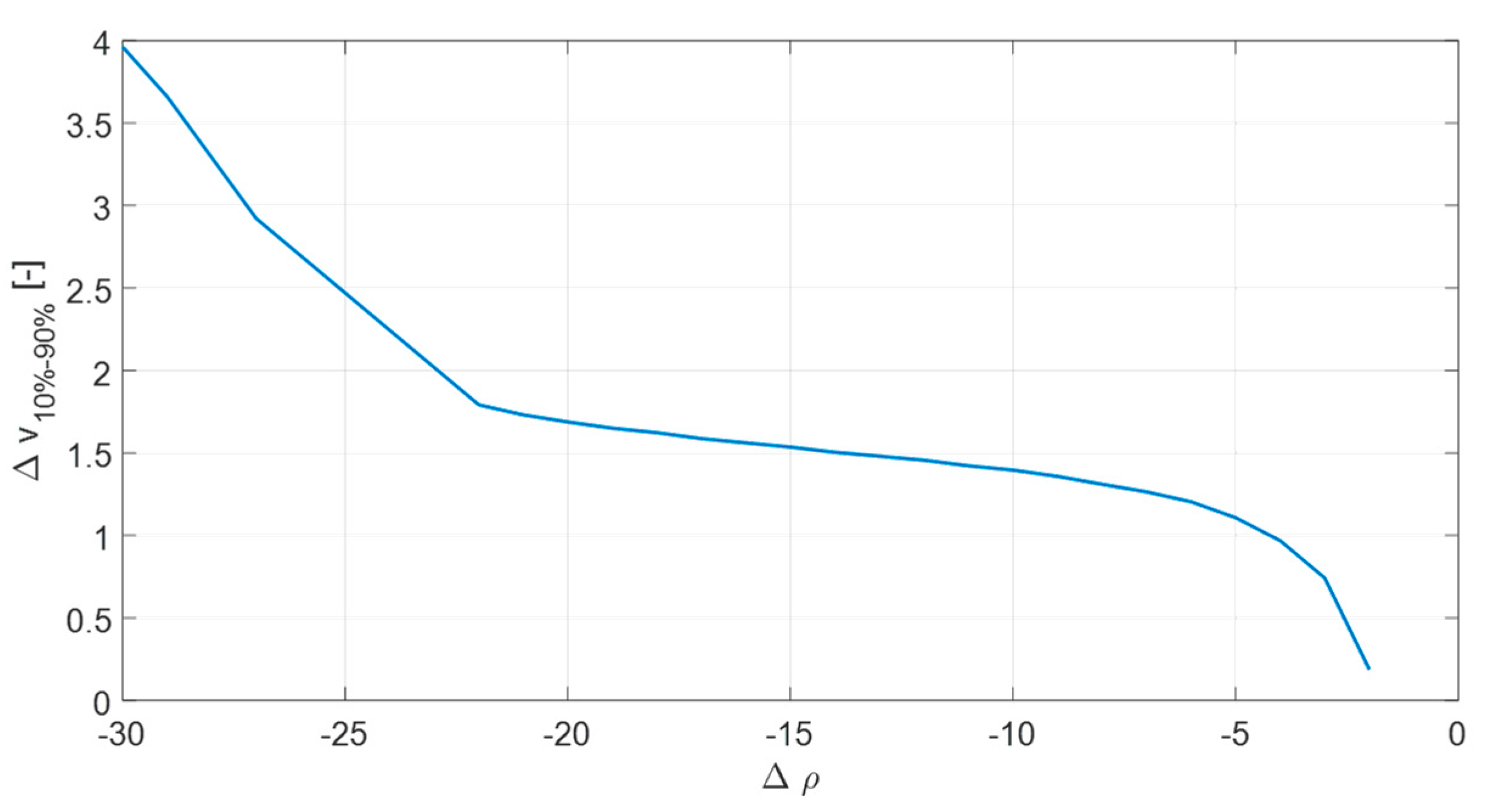
3.1. Spatial Resolution Computation
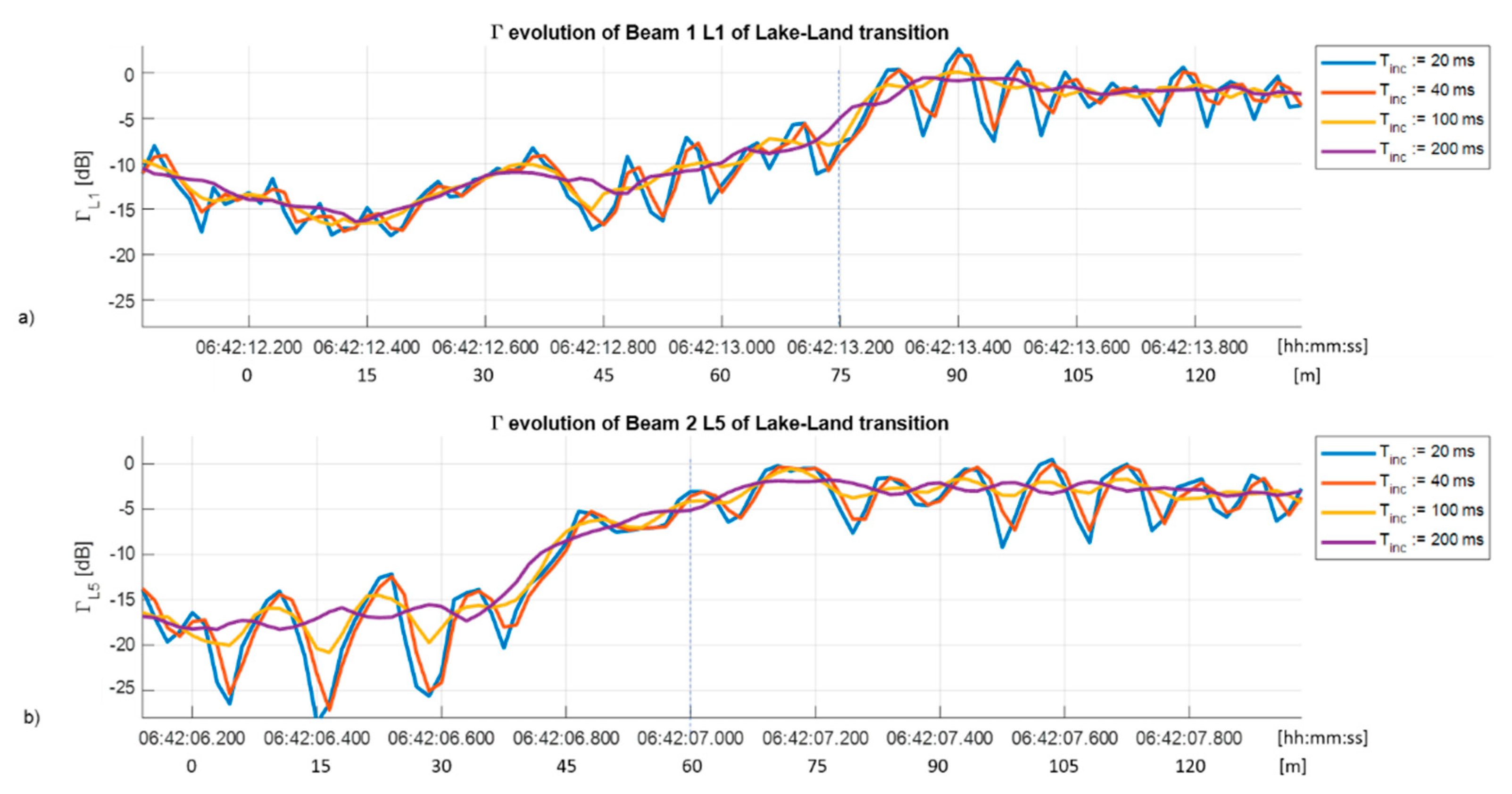
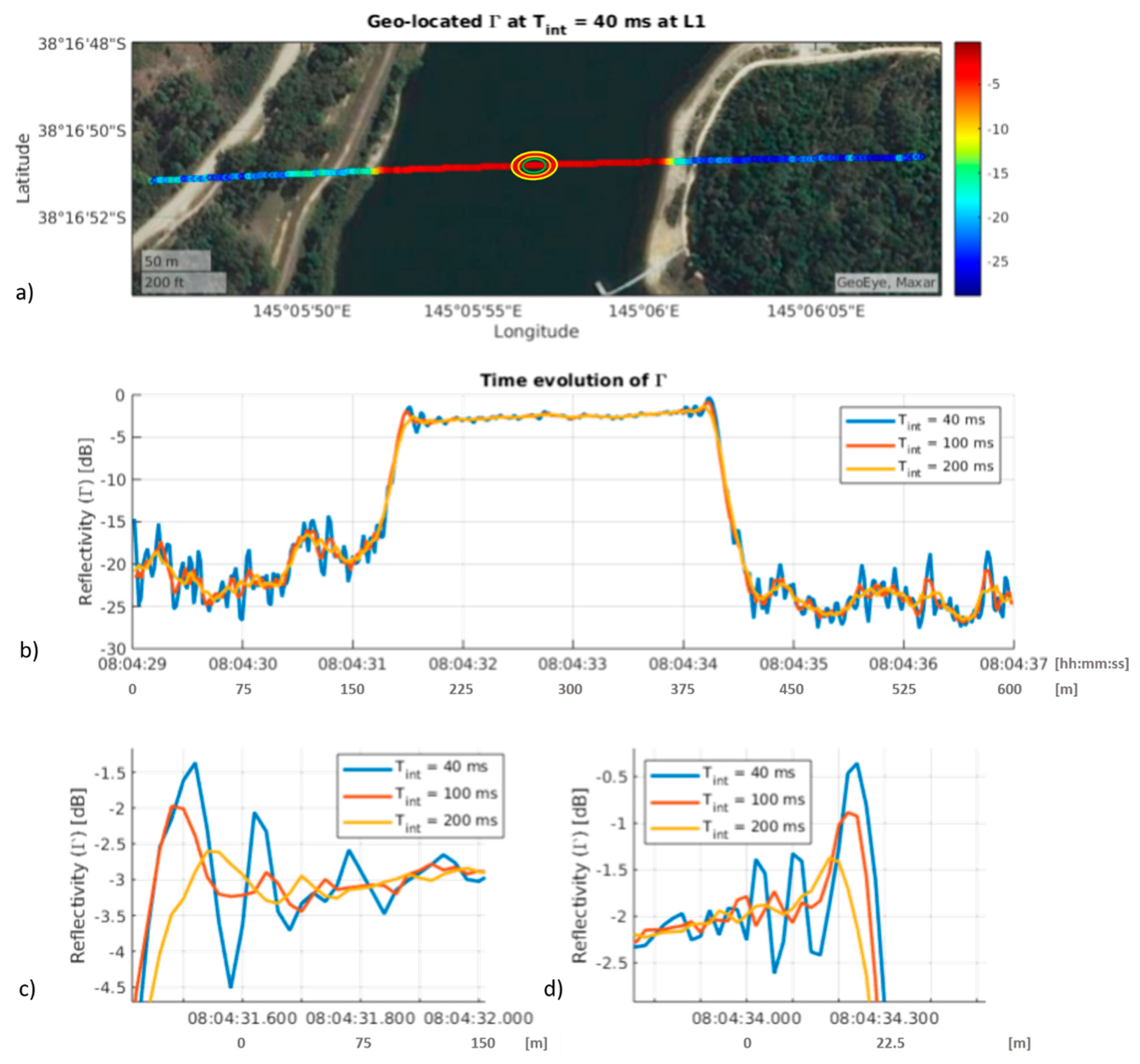
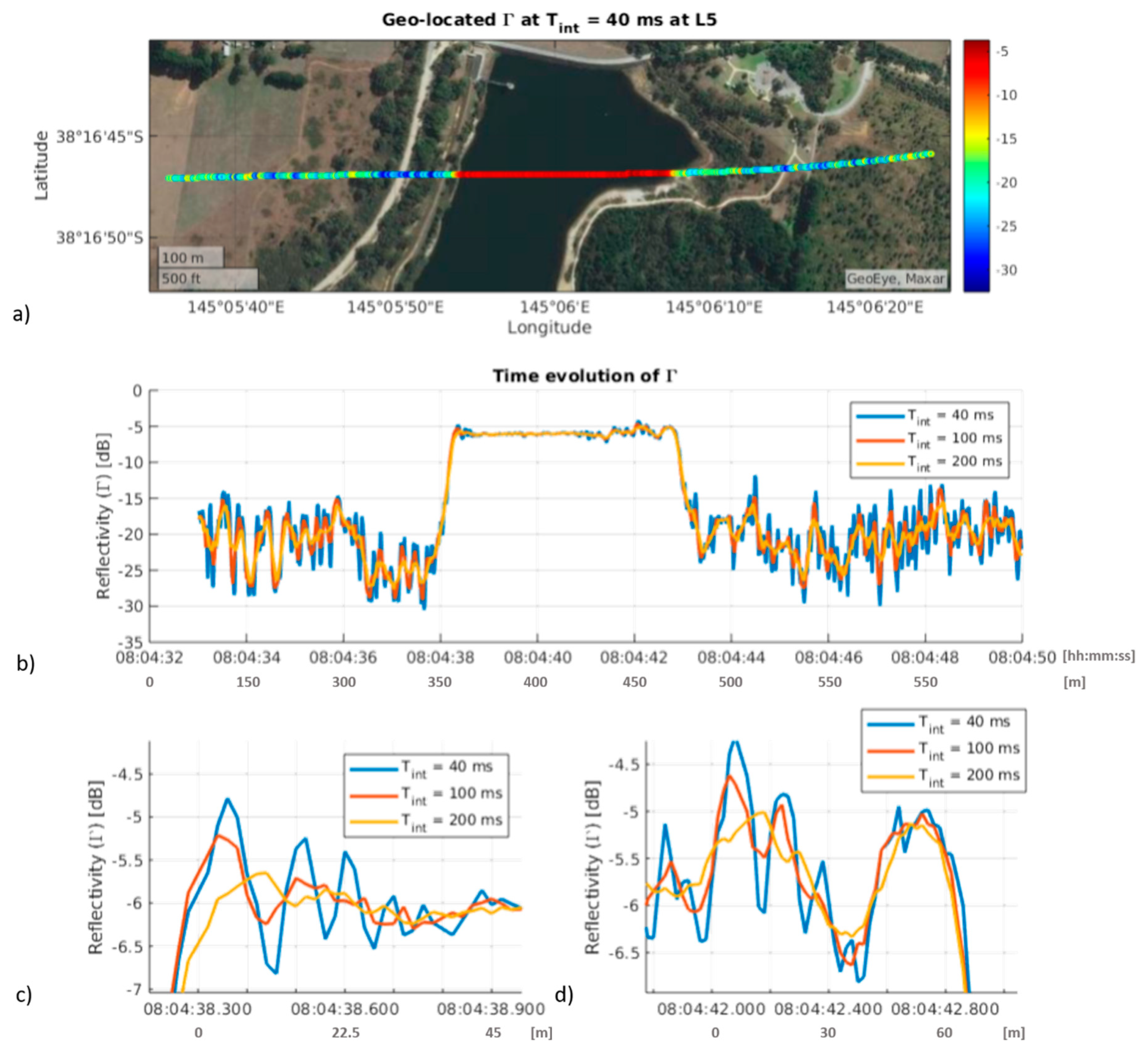
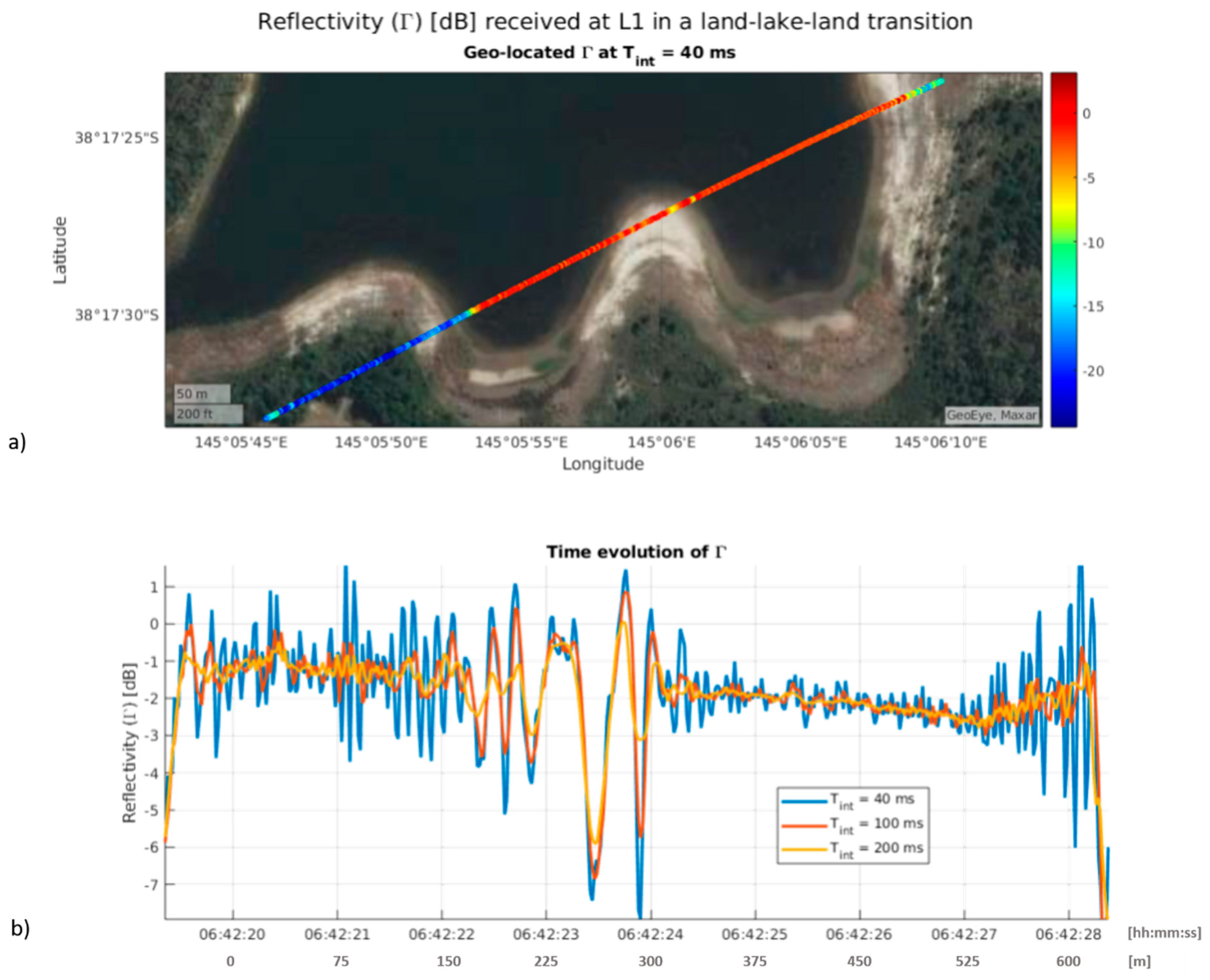
3.2. Experimental Validation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Martín-Neira, M. A passive reflectometry and interferometry system (PARIS): Application to ocean altimetry. ESA J. 1993, 17, 331–355. [Google Scholar]
- Clarizia, M.P.; Ruf, C.S. On the Spatial Resolution of GNSS Reflectometry. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1064–1068. [Google Scholar] [CrossRef]
- Martin, F.; Camps, A.; Fabra, F.; Rius, A.; Martin-Neira, M.; D’Addio, S.; Alonso, A. Mitigation of Direct Signal Cross-Talk and Study of the Coherent Component in GNSS-R. IEEE Geosci. Remote Sens. Lett. 2015, 12, 279–283. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Onrubia, R.; Pascual, D.; Park, H.; Camps, A.; Rüdiger, C.; Walker, J.; Monerris, A. Untangling the Incoherent and Coherent Scattering Components in GNSS-R and Novel Applications. Remote Sens. 2020, 12, 1208. [Google Scholar] [CrossRef]
- Seybold, J.S. Introduction to RF Propagation, 8th ed.; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2005. [Google Scholar] [CrossRef]
- Camps, A. Spatial Resolution in GNSS-R Under Coherent Scattering. IEEE Geosci. Remote Sens. Lett. 2020, 17, 32–36. [Google Scholar] [CrossRef]
- Onrubia, R.; Pascual, D.; Querol, J.; Park, H.; Camps, A. The Global Navigation Satellite Systems Reflectometry (GNSS-R) Microwave Interferometric Reflectometer: Hardware, Calibration, and Validation Experiments. Sensors 2019, 19, 1019. [Google Scholar] [CrossRef] [PubMed]
- Kong, J.A. Electromagnetic Wave Theory; EMW Publishing: Cambridge, MA, USA, 2008. [Google Scholar]
- Born, M.; Wolf, E. Principles of Optics; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Kubicke, G.; Yahia, Y.A.; Bourlier, C.; Pinel, N.; Pouliguen, P. Bridging the Gap Between the Babinet Principle and the Physical Optics Approximation: Scalar Problem. IEEE Trans. Antennas Propag. 2011, 59, 4725–4732. [Google Scholar] [CrossRef]
- Nghiem, S.V.; Zuffada, C.; Shah, R.; Chew, C.; Lowe, S.T.; Mannucci, A.J.; Cardellach, E.; Brakenridge, G.R.; Geller, G.; Rosenqvist, A. Wetland monitoring with Global Navigation Satellite System reflectometry. Earth Space Sci. 2017, 4, 16–39. [Google Scholar] [CrossRef] [PubMed]
- Chew, C.; Reager, J.T.; Small, E. CYGNSS data map flood inundation during the 2017 Atlantic hurricane season. Sci. Rep. 2018, 8, 9336. [Google Scholar] [CrossRef] [PubMed]
- Loria, E.; O’Brien, A.; Zavorotny, V.; Downs, B.; Zuffada, C. Analysis of scattering characteristics from inland bodies of water observed by CYGNSS. Remote Sens. Environ. 2020, 245, 111825. [Google Scholar] [CrossRef]
- Unnithan, S.L.K.; Biswal, B.; Rüdiger, C. Flood Inundation Mapping by Combining GNSS-R Signals with Topographical Information. Remote Sens. 2020, 12, 3026. [Google Scholar] [CrossRef]
- Unwin, M.; Jales, P.; Tye, J.; Gommenginger, C.; Foti, G.; Rosello, J. Spaceborne GNSS-Reflectometry on TechDemoSat-1: Early Mission Operations and Exploitation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4525–4539. [Google Scholar] [CrossRef]
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A New Paradigm in Earth Environmental Monitoring with the CYGNSS Small Satellite Constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
[s] | [ms] | [s] | [ms] | ||||
|---|---|---|---|---|---|---|---|
| −1.22 | - | Not visible | - | - | 7.140 | - | |
| −2.34 | 1.12 | 13.290 | - | - | 7.310 | 170 | 0.95 |
| −3.08 | 0.74 | 13.400 | 110 | 0.71 | 7.450 | 140 | 0.67 |
| −3.68 | 0.60 | 13.500 | 100 | 0.65 | 7.570 | 120 | 0.78 |
| −4.18 | 0.50 | 13.580 | 80 | 0.52 | 7.700 | 130 | 0.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Camps, A.; Munoz-Martin, J.F. Analytical Computation of the Spatial Resolution in GNSS-R and Experimental Validation at L1 and L5. Remote Sens. 2020, 12, 3910. https://doi.org/10.3390/rs12233910
Camps A, Munoz-Martin JF. Analytical Computation of the Spatial Resolution in GNSS-R and Experimental Validation at L1 and L5. Remote Sensing. 2020; 12(23):3910. https://doi.org/10.3390/rs12233910
Chicago/Turabian StyleCamps, Adriano, and Joan Francesc Munoz-Martin. 2020. "Analytical Computation of the Spatial Resolution in GNSS-R and Experimental Validation at L1 and L5" Remote Sensing 12, no. 23: 3910. https://doi.org/10.3390/rs12233910
APA StyleCamps, A., & Munoz-Martin, J. F. (2020). Analytical Computation of the Spatial Resolution in GNSS-R and Experimental Validation at L1 and L5. Remote Sensing, 12(23), 3910. https://doi.org/10.3390/rs12233910