Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Data Collection
2.2. Point Cloud Data Processing Method
2.3. QSM and Optimization Method
2.3.1. TreeQSM
2.3.2. Sensitivity Analysis Method
2.3.3. Parameter Optimization
- We defined a series of values for each input parameter, from which a set of optimal input parameters can be filtered for the following use:
- PatchDiam1: take any fixed value between 5–15 cm;
- PatchDiam2Min: within the range of 5–5 cm, take the value in 5 mm increments;
- PatchDiam2Max: within the range of 3–5 cm, take the value in 1 cm increments;
- Lcyl: 1, 2, 3, 4, 5, 6;
- FilRad: Take 2.5 or 3.5.
- 2.
- The sensitivity of five input parameters to branch information (length/number) was analyzed, and the sensitivity parameters for branch information extraction were determined.
- 3.
- Regarding the values of the optimal parameters that have been screened out in step 1, combined with the parameters that are sensitive to branch information determined in step 2, we took the parameters that were not sensitive to branch information as fixed values, that is, the optimal value of the corresponding parameter selected in step 1. Then, we determined a larger value range and a smaller step size for the sensitive parameters, and further optimized them to determine the values of the sensitive parameters more in line with the fruit trees in this study.
2.4. Accuracy Evaluation Method
3. Results
3.1. Sensitivity Analysis of Parameters
3.2. The Feasibility of QSM for Applying to Apple Trees Based on TLS
3.2.1. Uncertainty Analysis of Parameter Based on TLS Data
3.2.2. Accuracy Evaluation and Application to Apple Trees
3.3. Branch Information Extraction Based on Backpack-LiDAR
3.3.1. Uncertainty Analysis of Parameters Based on Backpack-LiDAR Data
3.3.2. Accuracy Evaluation and Potential Analysis of Backpack-LiDAR Data for Apple Trees
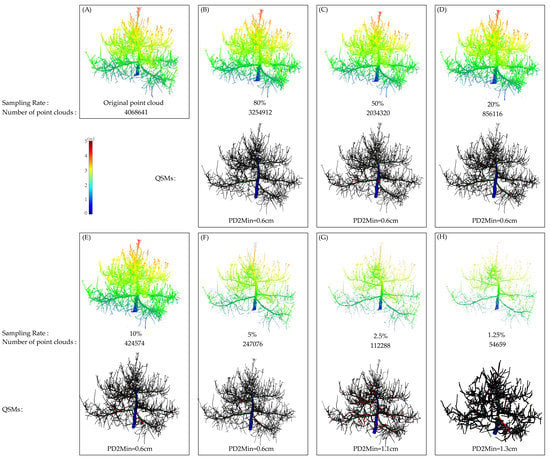
3.4. The Influence of Different Point Cloud Densities on Branch Extraction by QSM Based on TLS
4. Discussion
4.1. The Necessity of Downsampling High-Density Point Clouds
4.2. The Challenge of Extracting Fruit Tree Branch Information Using QSM
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast Automatic Precision Tree Models from Terrestrial Laser Scanner Data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Ye, N.; van Leeuwen, L.; Nyktas, P. Analysing the potential of UAV point cloud as input in quantitative structure modelling for assessment of woody biomass of single trees. Int. J. Appl. Earth Obs. Geoinf. 2019, 81, 47–57. [Google Scholar] [CrossRef]
- Dassot, M.; Fournier, M.; Deleuze, C. Assessing the scaling of the tree branch diameters frequency distribution with terrestrial laser scanning: Methodological framework and issues. Ann. For. Sci. 2019, 76, 66. [Google Scholar] [CrossRef]
- Fang, R.; Strimbu, B.M. Comparison of Mature Douglas-Firs’ Crown Structures Developed with Two Quantitative Structural Models Using TLS Point Clouds for Neighboring Trees in a Natural Regime Stand. Remote Sens. 2019, 11, 1661. [Google Scholar] [CrossRef]
- Calders, K.; Origo, N.; Burt, A.; Disney, M.; Nightingale, J.; Raumonen, P.; Åkerblom, M.; Malhi, Y.; Lewis, P. Realistic Forest Stand Reconstruction from Terrestrial LiDAR for Radiative Transfer Modelling. Remote Sens. 2018, 10, 933. [Google Scholar] [CrossRef]
- Yan, D.-M.; Wintz, J.; Mourrain, B.; Wang, W.; Boudon, F.; Godin, C. Efficient and robust reconstruction of botanical branching structure from laser scanned points. In Proceedings of the 2009 11th IEEE International Conference on Computer-Aided Design and Computer Graphics, Huangshan, China, 19–21 August 2009; pp. 572–575. [Google Scholar] [CrossRef]
- Bucksch, A.; Lindenbergh, R.; Menenti, M. SkelTre. Vis. Comput. 2010, 26, 1283–1300. [Google Scholar] [CrossRef]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree—An Efficient Open Source Tool to Build Tree Models from TLS Clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Verroust, A.; Lazarus, F. Extracting skeletal curves from 3D scattered data. In Proceedings of the Shape Modeling International ’99. International Conference on Shape Modeling and Applications, Aizu-Wakamatsu, Japan, 1–4 March 1999; pp. 194–201. [Google Scholar]
- Zhen, W.; Liqiang, Z.; Tian, F.; Mathiopoulos, P.T.; Huamin, Q.; Dong, C.; Yuebin, W. A Structure-Aware Global Optimization Method for Reconstructing 3-D Tree Models from Terrestrial Laser Scanning Data. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5653–5669. [Google Scholar] [CrossRef]
- Li, R.; Bu, G.; Wang, P. An Automatic Tree Skeleton Extracting Method Based on Point Cloud of Terrestrial Laser Scanner. Int. J. Opt. 2017, 2017, 5408503. [Google Scholar] [CrossRef]
- Livny, Y.; Yan, F.; Olson, M.; Chen, B.; Zhang, H.; El-Sana, J. Automatic reconstruction of tree skeletal structures from point clouds. In Proceedings of the ACM SIGGRAPH Asia 2010 papers on—SIGGRAPH ASIA ‘10, Seoul, Korea, 15–18 December 2010. [Google Scholar]
- Dey, T.K.; Sun, J. Defining and Computing Curve-skeletons with Medial. In Proceedings of the Symposium on Geometry Processing, Sardinia, Italy, 26–28 June 2006. [Google Scholar] [CrossRef]
- Huang, H.; Wu, S.; Cohen-Or, D.; Gong, M.; Zhang, H.; Li, G.; Chen, B. L1-Medial Skeleton of Point Cloud. ACM Trans. Graph. 2013. [Google Scholar] [CrossRef]
- Tagliasacchi, A.; Zhang, H.; Cohen-Or, D. Curve skeleton extraction from incomplete point cloud. ACM Trans. Graph. 2009, 28, 1–9. [Google Scholar] [CrossRef]
- Xu, H.; Gossett, N.; Chen, B. Knowledge and Heuristic Based Modeling of Laser-Scanned Trees. ACM Trans. Graph. 2007, 26, 19. [Google Scholar] [CrossRef]
- Du, S.; Lindenbergh, R.; Ledoux, H.; Stoter, J.; Nan, L. AdTree: Accurate, Detailed, and Automatic Modelling of Laser-Scanned Trees. Remote Sens. 2019, 11, 2074. [Google Scholar] [CrossRef]
- Wu, S.; Wen, W.; Xiao, B.; Guo, X.; Du, J.; Wang, C.; Wang, Y. An Accurate Skeleton Extraction Approach From 3D Point Clouds of Maize Plants. Front. Plant Sci. 2019, 10, 248. [Google Scholar] [CrossRef]
- Disney, M.I.; Boni Vicari, M.; Burt, A.; Calders, K.; Lewis, S.L.; Raumonen, P.; Wilkes, P. Weighing trees with lasers: Advances, challenges and opportunities. Interface Focus 2018, 8, 20170048. [Google Scholar] [CrossRef]
- Delagrange, S.; Jauvin, C.; Rochon, P. PypeTree: A tool for reconstructing tree perennial tissues from point clouds. Sensors 2014, 14, 4271–4289. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2014, 6, 198–208. [Google Scholar] [CrossRef]
- Åkerblom, M.; Raumonen, P.; Mäkipää, R.; Kaasalainen, M. Automatic tree species recognition with quantitative structure models. Remote Sens. Environ. 2017, 191, 1–12. [Google Scholar] [CrossRef]
- Raumonen, P. TreeQSM User’s Manual. 2019. Available online: https://github.com/InverseTampere/TreeQSM (accessed on 13 August 2020).
- Yang, J. Convergence and uncertainty analyses in Monte-Carlo based sensitivity analysis. Environ. Model. Softw. 2011, 26, 444–457. [Google Scholar] [CrossRef]
- Sobol’, I.M. On sensitivity estimation for nonlinear mathematical models. Mat. Modelirovanie 1990, 2, 112–118. [Google Scholar]
- Saltelli, A.; Tarantola, S.; Chan, K.P.-S. A Quantitative Model-Independent Method for Global Sensitivity Analysis of Model Outpu. Technometrics 1999, 41, 39–56. [Google Scholar] [CrossRef]
- Morris, M.D. Factorial Sampling Plans for Preliminary Computational Experiments. Technometrics 1991, 33, 161–174. [Google Scholar] [CrossRef]
- Helton, J.C. Uncertainty and sensitivity analysis techniques for use in performance assessment for radioactive waste disposal. Reliab. Eng. Syst. Saf. 1993, 42, 327–367. [Google Scholar] [CrossRef]
- Krishna Moorthy, S.M.; Raumonen, P.; Van den Bulcke, J.; Calders, K.; Verbeeck, H. Terrestrial laser scanning for non-destructive estimates of liana stem biomass. For. Ecol. Manag. 2020, 456, 117751. [Google Scholar] [CrossRef]
- Burt, A.P. New 3D Measurements of Forest Structure. Ph.D. Thesis, University College London, London, UK, 2017. [Google Scholar]
- Li, Z. Predicting Winter Wheat Yield and Quality by Integrating of Remote-Sensing Data and the weather forecast data into the DASSAT Model. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2016. [Google Scholar]
- Gonzalez de Tanago, J.; Lau, A.; Bartholomeus, H.; Herold, M.; Avitabile, V.; Raumonen, P.; Martius, C.; Goodman, R.C.; Disney, M.; Manuri, S.; et al. Estimation of above-ground biomass of large tropical trees with terrestrial LiDAR. Methods Ecol. Evol. 2017, 9, 223–234. [Google Scholar] [CrossRef]
- Marzulli, M.I.; Raumonen, P.; Greco, R.; Persia, M.; Tartarino, P. Estimating tree stem diameters and volume from smartphone photogrammetric point clouds. For. Int. J. For. Res. 2020, 93, 411–429. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| First-Order | Second-Order | Third-Order | Fourth-Order | Total | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Trees | Length | Number | Length | Number | Length | Number | Length | Number | Length | Number |
| 1 | 17.34 | 10 | 109.24 | 100 | 210.62 | 327 | 76.08 | 34 | 413.28 | 522 |
| 2 | 22.66 | 12 | 227.12 | 316 | 287.22 | 755 | 47.64 | 167 | 584.64 | 1250 |
| 3 | 21.04 | 10 | 89.18 | 75 | 208.84 | 308 | 85.64 | 144 | 403.7 | 537 |
| 4 | 22.37 | 10 | 256.93 | 350 | 259.43 | 655 | 15.38 | 48 | 554.11 | 1063 |
| 5 | 20.39 | 11 | 102.89 | 140 | 165.46 | 383 | 36.95 | 149 | 325.68 | 683 |
| 6 | 30.43 | 14 | 250.58 | 340 | 288.12 | 710 | 29.82 | 96 | 595.95 | 1160 |
| 7 | 25.85 | 11 | 175.01 | 247 | 282.54 | 721 | 73.88 | 262 | 562.67 | 1267 |
| 8 | 25.67 | 9 | 209.64 | 313 | 269.05 | 665 | 28.27 | 88 | 533.28 | 1078 |
| 9 | 21.16 | 9 | 137.53 | 214 | 150.75 | 363 | 28.84 | 81 | 338.54 | 668 |
| 10 | 27.98 | 13 | 197.57 | 391 | 208.56 | 627 | 18.79 | 63 | 452.9 | 1094 |
| Max | 30.43 | 14 | 256.93 | 391 | 288.12 | 755 | 85.64 | 167 | 595.95 | 1267 |
| Min | 17.34 | 9 | 102.89 | 75 | 150.75 | 308 | 15.38 | 34 | 338.54 | 471 |
| mean | 23.49 | 10.9 | 175.57 | 248.6 | 233.06 | 551.4 | 44.13 | 113.2 | 476.48 | 932.1 |
| - | First-Order | Second-Order | Third-Order | Fourth-Order | Total | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| - | Length | Number | Length | Number | Length | Number | Length | Number | Length | Number |
| In | 30.43 | 14 | 253.58 | 340 | 288.12 | 710 | 29.82 | 96 | 598.95 | 1160 |
| Models | 32.69 | 15.68 | 211.11 | 307.14 | 184.87 | 540.96 | 62.87 | 253.60 | 507.07 | 1193.52 |
| Std | 2.49 | 2.81 | 11.25 | 18.45 | 5.41 | 25.04 | 7.58 | 24.77 | 6.34 | 47.66 |
| R (%) | 7.43 | 12.00 | 16.75 | 9.67 | 35.84 | 23.81 | 110.83 | 164.17 | 15.34 | 2.89 |
| - | First-Order | Second-Order | Third-Order | Fourth-Order | Total | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| - | Length | Number | Length | Number | Length | Number | Length | Number | Length | Number |
| 100% | 32.56 | 15.27 | 235.25 | 314.47 | 214.30 | 574.11 | 62.77 | 216.15 | 544.88 | 1149.17 |
| 80% | 32.41 | 15.50 | 234.69 | 315.18 | 208.69 | 564.81 | 63.86 | 235.84 | 543.15 | 1151.65 |
| 50% | 33.23 | 15.48 | 227.21 | 310.83 | 208.69 | 536.48 | 60.66 | 229.10 | 528.63 | 1150.60 |
| 20% | 33.41 | 15.72 | 222.47 | 299.00 | 192.93 | 512.27 | 54.62 | 213.50 | 527.79 | 1094.04 |
| 10% | 33.72 | 16.10 | 217.39 | 300.97 | 190.04 | 487.13 | 57.63 | 193.72 | 504.02 | 1047.48 |
| 5% | 32.69 | 15.68 | 211.11 | 307.14 | 184.87 | 540.96 | 62.87 | 253.6 | 507.07 | 1193.52 |
| 2.5% | 33.37 | 16.5 | 195.36 | 273.12 | 159.96 | 424.64 | 51.97 | 181.92 | 452.57 | 944.82 |
| 1.25% | 14.02 | 5.48 | 64.59 | 67.54 | 104.21 | 167.5 | 87.12 | 166.76 | 334.63 | 557.58 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Yang, G.; Jiang, Y.; Xu, B.; Li, X.; Zhu, Y.; Lei, L.; Chen, R.; Dong, Z.; Yang, H. Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR. Remote Sens. 2020, 12, 3592. https://doi.org/10.3390/rs12213592
Zhang C, Yang G, Jiang Y, Xu B, Li X, Zhu Y, Lei L, Chen R, Dong Z, Yang H. Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR. Remote Sensing. 2020; 12(21):3592. https://doi.org/10.3390/rs12213592
Chicago/Turabian StyleZhang, Chengjian, Guijun Yang, Youyi Jiang, Bo Xu, Xiao Li, Yaohui Zhu, Lei Lei, Riqiang Chen, Zhen Dong, and Hao Yang. 2020. "Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR" Remote Sensing 12, no. 21: 3592. https://doi.org/10.3390/rs12213592
APA StyleZhang, C., Yang, G., Jiang, Y., Xu, B., Li, X., Zhu, Y., Lei, L., Chen, R., Dong, Z., & Yang, H. (2020). Apple Tree Branch Information Extraction from Terrestrial Laser Scanning and Backpack-LiDAR. Remote Sensing, 12(21), 3592. https://doi.org/10.3390/rs12213592