A Study of Sonar Image Stabilization of Unmanned Surface Vehicle Based on Motion Sensor for Inspection of Underwater Infrastructure


Abstract
1. Introduction
2. Development of the USV Sonar for Surveying Underwater Structures
2.1. Development of an USV for the Surveying Underwater Structures
2.2. The Development of Side-Scan Sonar for Installation in the USV
2.3. Structure of Sonar Data
3. Development of a Method for Sonar Image Stabilization
3.1. Image Stabilization Concept
3.2. An Algorithm of Sonar Image Stabilization Using Motion Sensor
3.3. The Sonar Image Stabilization Program
4. Verification through Field Test
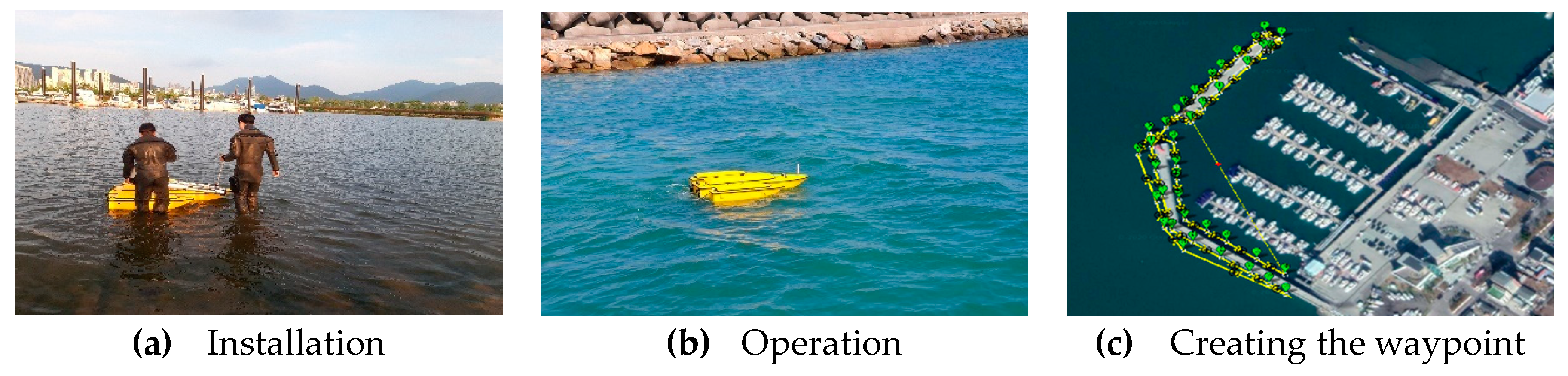
4.1. Field Test
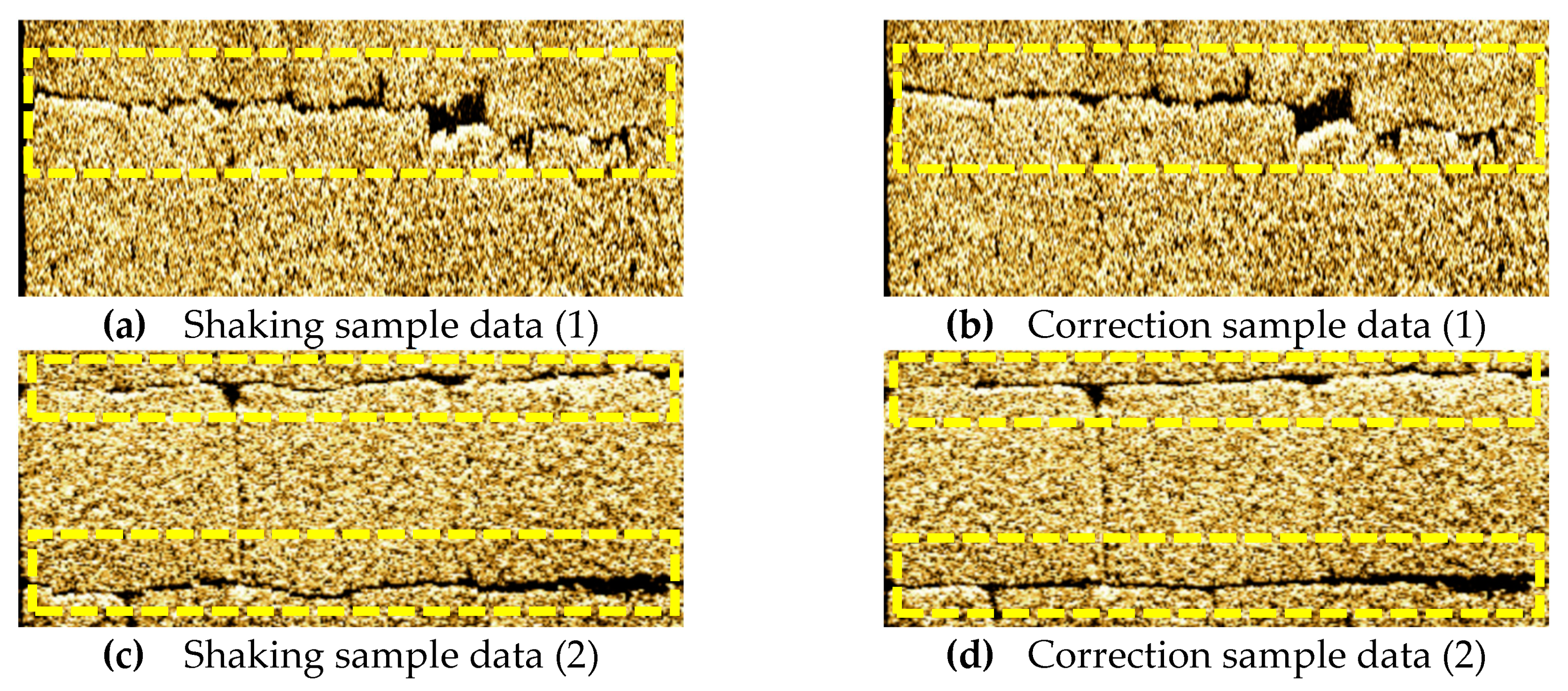
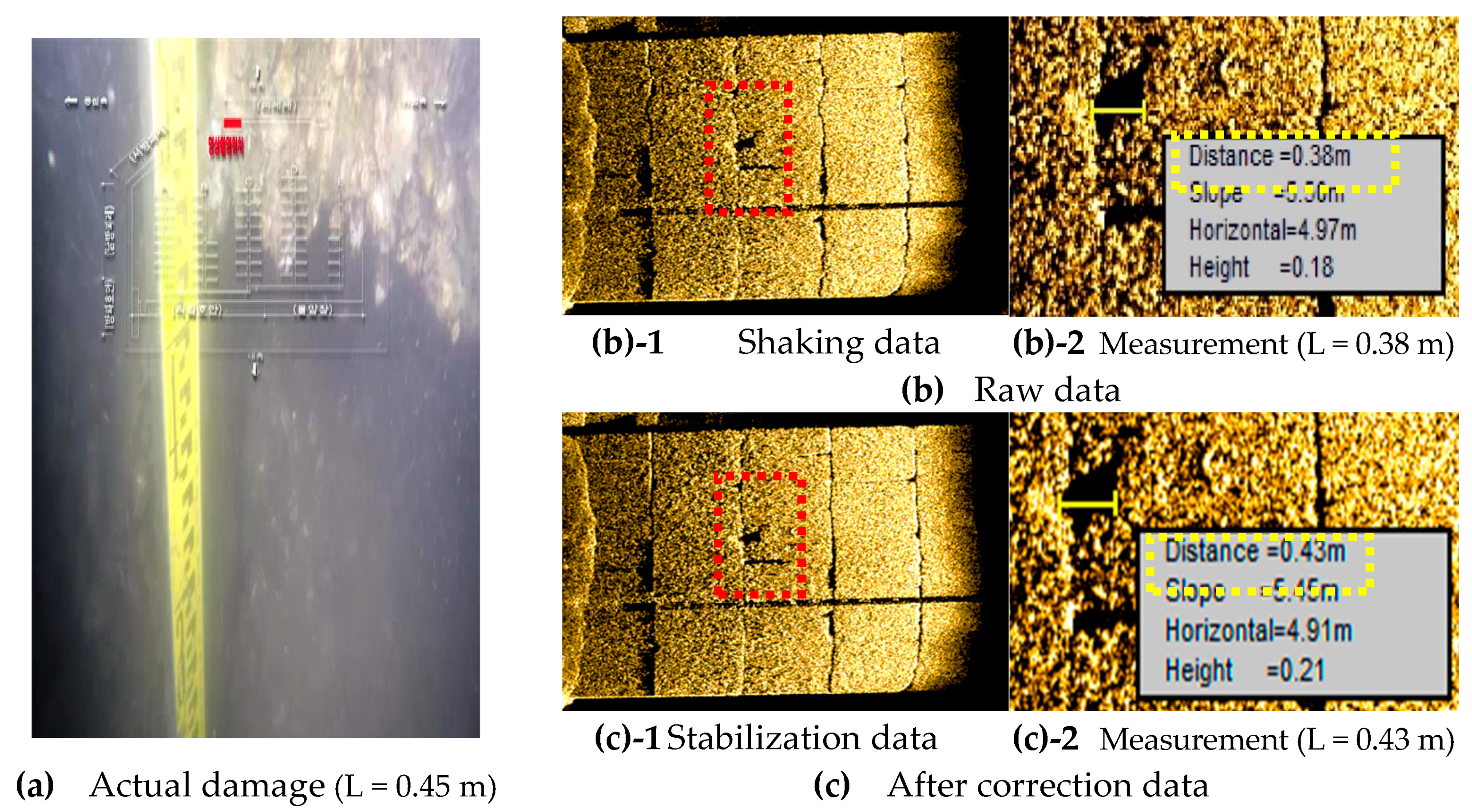
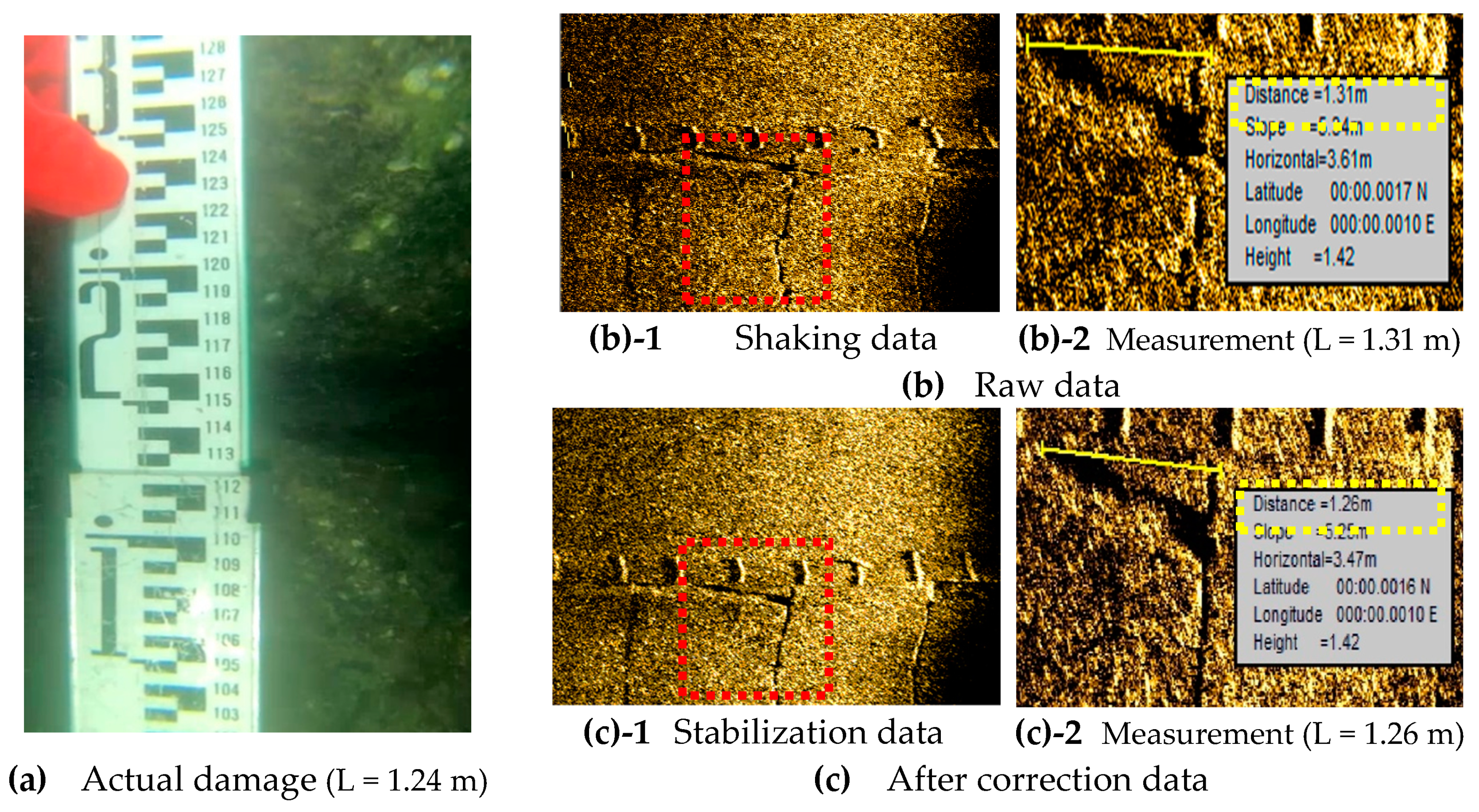
4.2. Results of the Field Test
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Park, C.; Kim, Y.; Lee, H.; Choi, S.; Jung, H. Development of a 2 MHz sonar sensor for inspection of bridge substructures. Sensors 2018, 18, 1222. [Google Scholar] [CrossRef] [PubMed]
- Chandran, V.; Elgar, S.; Nguyen, A. Detection of mines in acoustic images using higher order spectral features. IEEE J. Ocean. Eng. 2002, 27, 610–618. [Google Scholar] [CrossRef]
- Ollivier, F.; Cervenka, P.; Alais, P. Side scan sonar using phased arrays for high resolution imaging and wide swath bathymetry. IEE Proc. Radar Sonar Navig. 1996, 143, 163. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, H.; Park, C.; Choi, S. A study for optimum survey method of underwater structure using the dual sonar sensor. J. Sens. 2017, 2017, 9206898. [Google Scholar] [CrossRef]
- Seo, J. Current status and prospects of underwater robot industry. Korea Inst. Robot Ind. Adv. 2014, 2. Available online: https://www.kiria.org/portal/reference/portalRefTrendList.do#link (accessed on 10 April 2014).
- Andziulis, A.; Lenkauskas, T.; Eglynas, T.; Voznak, M.; Jakovlev, S. Investigation of SONAR stabilization method for improved seafloor image quality. Geoinformatics Intell. Transp. 2015, 1–6. Available online: https://link.springer.com/chapter/10.1007/978-3-319-11463-7_1 (accessed on 21 October 2020).
- Klaucke, I. Sidescan Sonar. In Submarine Geomorphology; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Heo, J.H.; Kim, J.H.; Lee, D.-H.; Kim, Y.H.; Cho, J.D. Real-time digital image stabilization using motion sensors for search range reduction. Inst. Electr. Electr. Eng. 2012, 363–366. [Google Scholar] [CrossRef]
- Cheng, X.; Hao, Q.; Xie, M. A comprehensive motion estimation technique for the improvement of EIS methods based on the SURF algorithm and kalman filter. Sensors 2016, 16, 486. [Google Scholar] [CrossRef] [PubMed]
- Oh, J.-S.; Sim, K.-B. Digital image stabilization technique of robot using motion sensor. J. Korean Inst. Intell. Syst. 2009, 19, 317–322. [Google Scholar] [CrossRef]
- Park, H.C.; Hwang, C.S. Motion compensation by affine transform using edge information of image. J. Korean Inst. Commun. Inf. Sci. 1999, 24, 297–305. [Google Scholar]
- Fang, L.; Xiaozhen, Q. An electronic image stabilization algorithm based on efficient block matching on the bitplane. Open J. Appl. Sci. 2013, 3, 1–5. [Google Scholar] [CrossRef]
- Ho, H.N.; Lee, J.J.; Park, C.; Jo, B.W. An efficient image enhancement algorithm for sonar sensor data. Int. J. Latest Res. Sci. Technol. 2013, 2, 38–43. [Google Scholar]
- Yi, J.H.; Kim, Y.S.; Park, C.; Choi, S.S.; Lee, H.S. A study of data management methods through shake correction of underwater investigation using high resolution side scan SONAR. J. Korea Inst. Struct. Maint. Insp. 2017, 21, 94–100. [Google Scholar]
- Kye, J.E.; Cho, J.I.; Yoo, W.P.; Choi, S.L.; Park, J.H. Trends and applications on multi-beam side scan sonar sensor technol. Electron. Telecommun. Trends 2013, 28, 167–169. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Fiberglass Reinforced Plastic, Carbon Pipe, Aluminum Jig |
| Body Size | 1700 × 1060 × 410 (L × W × H/mm) |
| Weight | Approx. 15 kgf |
| Max Front Thrust | 18.4 kgf |
| Power | 24VDC Battery, 50 Ah |
| Motor Type | Brushless, 24VDC |
| Max Power | 980 W |
| Material | SUS 316, Aluminum 6061, Acetal Resin |
| Sonar Frequency | 1250 kHz, 2 MHz |
| Across- track Resolution | 1250 kHz: 3 cm, 2 MHz: 0.8 cm |
| Weight | 16.1 kgf (in the air), 9.6 kgf (in the water) |
| Beam tilt | 20° |
| Motor rotation | 360° |
| Towing Speed | 1~8 knot (0.51~4.1 m/sec) |
 | Azimuth accuracy | <0.5°, 0.1° resolution |
| Inclination accuracy | Typical 1° accuracy <±30° tilt | |
| Inclination range | ±80° | |
| Temperature range | Accuracy specified for 0 °C to 50 °C, −40 °C to +85 °C | |
| Shock (Operating) | 3000 G, 0.5 ms, 10,000 G 0.1 ms | |
| Data Refresh Rate | 0.01 Hz to 40Hz sentence output rate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Ryou, J. A Study of Sonar Image Stabilization of Unmanned Surface Vehicle Based on Motion Sensor for Inspection of Underwater Infrastructure. Remote Sens. 2020, 12, 3481. https://doi.org/10.3390/rs12213481
Kim Y, Ryou J. A Study of Sonar Image Stabilization of Unmanned Surface Vehicle Based on Motion Sensor for Inspection of Underwater Infrastructure. Remote Sensing. 2020; 12(21):3481. https://doi.org/10.3390/rs12213481
Chicago/Turabian StyleKim, Youngseok, and Jaesuk Ryou. 2020. "A Study of Sonar Image Stabilization of Unmanned Surface Vehicle Based on Motion Sensor for Inspection of Underwater Infrastructure" Remote Sensing 12, no. 21: 3481. https://doi.org/10.3390/rs12213481
APA StyleKim, Y., & Ryou, J. (2020). A Study of Sonar Image Stabilization of Unmanned Surface Vehicle Based on Motion Sensor for Inspection of Underwater Infrastructure. Remote Sensing, 12(21), 3481. https://doi.org/10.3390/rs12213481