Individual Palm Tree Detection Using Deep Learning on RGB Imagery to Support Tree Inventory




Abstract
1. Introduction
2. Study Area
2.1. Canary Islands
2.2. Alicante
3. Data and Methodology
3.1. Remote Sensing Imagery and Palm Map
3.2. Experiments and Experimental Set-Up
3.3. Evaluation
4. Results
4.1. Training Performance
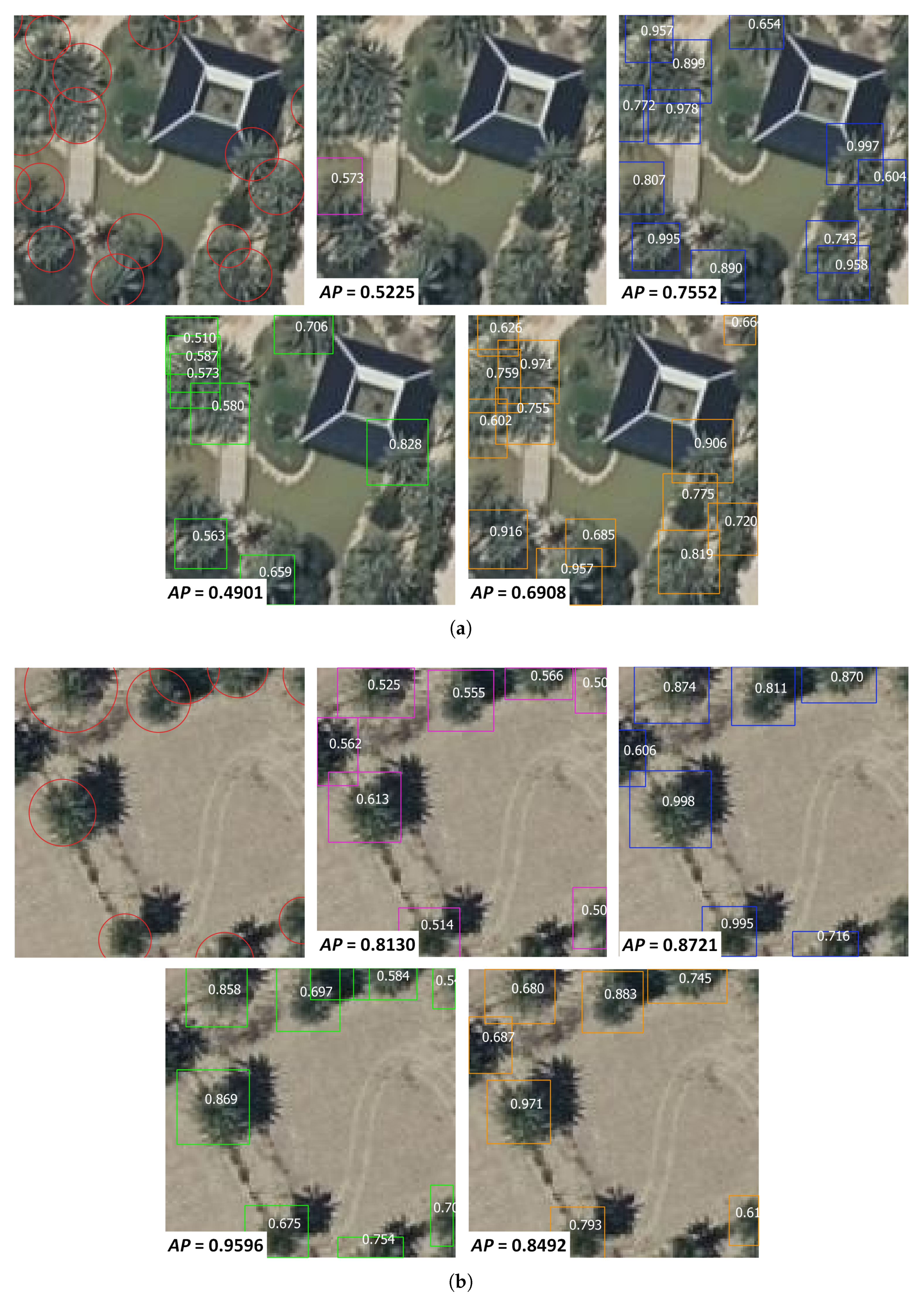
4.2. Inventory Performance
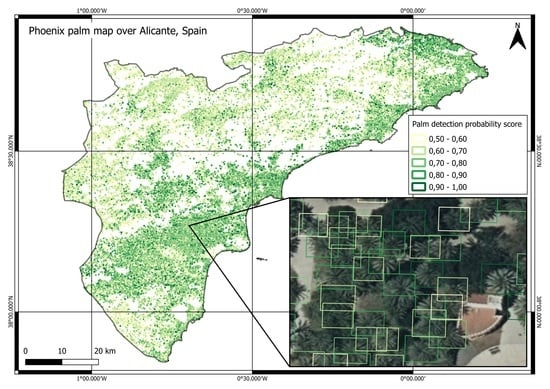
4.3. Inventory
5. Discussion
5.1. Transfer Learning Impact and Detection Limitations
5.2. Palm Tree Detection: Beyond the Basics
5.3. Phoenix Palm Tree Inventory for Future Research
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Purpose | Study Site | Number of Image Patches | Number of Palm Crowns Annotated | Number of Palm Crown Annotations |
|---|---|---|---|---|
| Training | La Gomera, the Canary Islands autonomous community | 193,202 | 116,330 | 634,064 |
| Training | La Palma and El Hierro, the Canary Islands autonomous community | 42,335 | 18,532 | 75,388 |
| Training | Alicante, Valencian autonomous community | 762 | 5104 | 12,080 |
| Testing | Alicante, Valencian autonomous community | 50,828 | 7473 | 18,217 |
| Inventory | Alicante, Valencian autonomous community | 13,321,770 | - | - |


| Study Site | Training and Validation Split (Image Patches) | Training and Validation Split (Annotations) |
|---|---|---|
| La Gomera, the Canary Islands autonomous community | 154,561-38,641 | 506,765-127,299 |
| La Palma and El Hierro, the Canary Islands autonomous community | 33,861-8474 | 60,136-15,252 |
| Alicante, Valencian autonomous community | 609-153 | 1st iteration: 9876-2204 2nd iteration: 9472-2608 3rd iteration: 9728-2352 4th iteration: 9595-2485 5th iteration: 9650-2430 |
References
- Food and Agriculture Organization of the United Nations (FAO). FAOSTAT. Countries by Commodity. Dates. 2017. Available online: http://www.fao.org/faostat/en/#rankings/countries_by_commodity_exports (accessed on 28 July 2019).
- Chao, C.T.; Krueger, R.R. The Date Palm (Phoenix dactylifera L.): Overview of Biology, Uses, and Cultivation. Hortsci. Horts 2007, 42, 1077–1082. [Google Scholar] [CrossRef]
- Ghnimi, S.; Umer, S.; Karim, A.; Kamal-Eldin, A. Date fruit (Phoenix dactylifera L.): An underutilized food seeking industrial valorization. NFS J. 2017, 6, 1–10. [Google Scholar] [CrossRef]
- Rivera, D.; Obón, C.; Alcaraz, F.; Laguna, E.; Johnson, D. Date-palm (Phoenix, Arecaceae) iconography in coins from the Mediterranean and West Asia (485 BC–1189 AD). J. Cult. Herit. 2019, 37, 199–214. [Google Scholar] [CrossRef]
- Chalak, L.; Baydoun, S.A.; Jaradat, A.A. Genetic resources of fruit trees in the Fertile Crescent: A hotspot heritage. Acta Hortic. 2020, 1267, 77–84. [Google Scholar] [CrossRef]
- Zaid, A.; de Wet, P. Botanical and systematic description of the date palm. In Date Palm Cultivation; Zaid, A., Ed.; Food and Agriculture Organization of the United Nations (FAO): Rome, Italy, 2002; Chapter I. [Google Scholar]
- Rivera, D.; Obón, C.; Alcaraz, F.; Egea, T.; Carreño, E.; Laguna, E.; Santos, A.; Wildpret, W. A review of the nomenclature and typification of the Canary Islands endemic palm, Phoenix canariensis (Arecaceae). Taxon 2013, 62, 1275–1282. [Google Scholar] [CrossRef]
- Johnson, D.V.; Al-Khayri, J.M.; Jain, S.M. Introduction: Date Production Status and Prospects in Asia and Europe. In Date Palm Genetic Resources and Utilization: Volume 2: Asia and Europe; Al-Khayri, J.M., Jain, S.M., Johnson, D.V., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 1–16. [Google Scholar] [CrossRef]
- Johnson, D.V.; Al-Khayri, J.M.; Jain, S.M. Introduction: Date Production Status and Prospects in Africa and the Americas. In Date Palm Genetic Resources and Utilization: Volume 1: Africa and the Americas; Al-Khayri, J.M., Jain, S.M., Johnson, D.V., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 3–18. [Google Scholar] [CrossRef]
- Obón, C.; Rivera, D.; Alcaraz, F.; Carreño, E.; Ríos, S.; Laguna, E.; Sánchez-Balibrea, J.; del Arco, M.; Bergmeier, E.; Johnson, D. What are palm groves of Phoenix? Conservation of Phoenix palm groves in the European Union. Biodivers. Conserv. 2018, 27, 1905–1924. [Google Scholar] [CrossRef]
- Food and Agriculture Organization of the United Nations (FAO). FAOSTAT. Crops: Area Harvested, Dates. 2017; Available online: http://www.fao.org/faostat/en/#data/QC (accessed on 28 July 2019).
- Rivera, D.; Obón, C.; Alcaraz, F.; Carreño, E.; Laguna, E.; Amorós, A.; Johnson, D.V.; Díaz, G.; Morte, A. Date Palm Status and Perspective in Spain. In Date Palm Genetic Resources and Utilization: Volume 2: Asia and Europe; Al-Khayri, J.M., Jain, S.M., Johnson, D.V., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 489–526. [Google Scholar] [CrossRef]
- Rivera Núñez, D.; de Castro, C.; Verde, A.; Fajardo, J.; Valdés, A.; Alcaraz Ariza, F.; Carreño Sánchez, E.; Heinrich, M.; Martinez-Garcia, M.; Ríos Ruiz, S.; et al. La palmera datilera y la palmera canaria en la medicina tradicional de España. Rev. Fitoter. 2014, 14, 67–81. [Google Scholar]
- Zaid, A.; de Wet, P. Origin, geographical distribution and nutritional values of date palm. In Date Palm Cultivation; Zaid, A., Ed.; Food and Agriculture Organization of the United Nations (FAO): Rome, Italy, 2002; Chapter II. [Google Scholar]
- Jaradat, A.A. Biodiversity, Genetic Diversity, and Genetic Resources of Date Palm. In Date Palm Genetic Resources and Utilization: Volume 1: Africa and the Americas; Al-Khayri, J.M., Jain, S.M., Johnson, D.V., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 19–71. [Google Scholar] [CrossRef]
- El-Sabea, A.M.R.; Faleiro, J.R.; Abo-El-Saad, M.M. The threat of red palm weevil Rhynchophorus ferrugineus to date plantations of the Gulf region in the Middle-East: An economic perspective. Outlooks Pest Manag. 2009, 20, 131–134. [Google Scholar] [CrossRef]
- Al-Dosary, N.; Al-Dobai, S.; Faleiro, J. Review on the management of red palm weevil Rhynchophorus ferrugineus olivier in date palm Phoenix dactylifera L. Emir. J. Food Agric. 2015, 28, 34–44. [Google Scholar] [CrossRef]
- European Commission. The Insect Killing Our Palm Trees EU Eff Orts to Stop the Red Palm Weevil; Office for Official Publications of the European Communities: Luxembourg, 2011; pp. 1–32. [Google Scholar] [CrossRef]
- Dembilio, Ó.; Jacas, J.A. Basic bio-ecological parameters of the invasive Red Palm Weevil, Rhynchophorus ferrugineus (Coleoptera: Curculionidae), in Phoenix canariensis under Mediterranean climate. Bull. Entomol. Res. 2011, 101, 153–163. [Google Scholar] [CrossRef]
- EPPO. Data sheets on quarantine pests: Rhynchophorus ferrugineus. Bull. OEPP/EPPO 2008, 38, 55–59. [Google Scholar] [CrossRef]
- Kontodimas, D.; Soroker, V.; Pontikakos, C.; Suma, P.; Beaudoin-Ollivier, L.; Karamaouna, F.; Riolo, P. Visual Identification and Characterization of Rhynchophorus Ferrugineus and Paysandisia Archon Infestation. In Handbook of Major Palm Pests: Biology and Management; Soroker, V., Colazza, S., Eds.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017; Chapter 9; pp. 187–208. [Google Scholar] [CrossRef]
- Soroker, V.; Suma, P.; La Pergola, A.; Llopis, V.N.; Vacas, S.; Cohen, Y.; Cohen, Y.; Alchanatis, V.; Milonas, P.; Golomb, O.; et al. Surveillance Techniques and Detection Methods for Rhynchophorus ferrugineus and Paysandisia archon. In Handbook of Major Palm Pests: Biology and Management; Soroker, V., Colazza, S., Eds.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017; Chapter 10; pp. 209–232. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Nelson, R.F.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ. 2012, 121, 196–209. [Google Scholar] [CrossRef]
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Barrett, F.; McRoberts, R.E.; Tomppo, E.; Cienciala, E.; Waser, L.T. A questionnaire-based review of the operational use of remotely sensed data by national forest inventories. Remote Sens. Environ. 2016, 174, 279–289. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. [Google Scholar] [CrossRef]
- Branson, S.; Wegner, J.D.; Hall, D.; Lang, N.; Schindler, K.; Perona, P. From Google Maps to a fine-grained catalog of street trees. ISPRS J. Photogramm. Remote Sens. 2018, 135, 13–30. [Google Scholar] [CrossRef]
- Saldana Ochoa, K.; Guo, Z. A framework for the management of agricultural resources with automated aerial imagery detection. Comput. Electron. Agric. 2019, 162, 53–69. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- O’Mahony, N.; Campbell, S.; Carvalho, A.; Harapanahalli, S.; Hernandez, G.V.; Krpalkova, L.; Riordan, D.; Walsh, J. Deep Learning vs. Traditional Computer Vision BT-Advances in Computer Vision; CVC 2019; Arai, K., Kapoor, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 128–144. [Google Scholar] [CrossRef]
- Mubin, N.A.; Nadarajoo, E.; Shafri, H.Z.M.; Hamedianfar, A. Young and mature oil palm tree detection and counting using convolutional neural network deep learning method. Int. J. Remote Sens. 2019, 40, 7500–7515. [Google Scholar] [CrossRef]
- Freudenberg, M.; Nölke, N.; Agostini, A.; Urban, K.; Wörgötter, F.; Kleinn, C. Large scale palm tree detection in high resolution satellite images using U-Net. Remote Sens. 2019, 11, 312. [Google Scholar] [CrossRef]
- Li, W.; Dong, R.; Fu, H.; Yu, L. Large-scale oil palm tree detection from high-resolution satellite images using two-stage convolutional neural networks. Remote Sens. 2019, 11, 11. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.; Wu, B. Automatic detection of individual oil palm trees from UAV images using HOG features and an SVM classifier. Int. J. Remote Sens. 2019, 40, 7356–7370. [Google Scholar] [CrossRef]
- Rizeei, H.M.; Shafri, H.Z.M.; Mohamoud, M.A.; Pradhan, B.; Kalantar, B. Oil Palm Counting and Age Estimation from WorldView-3 Imagery and LiDAR Data Using an Integrated OBIA Height Model and Regression Analysis. J. Sens. 2018, 2018, 13. [Google Scholar] [CrossRef]
- Li, W.; Fu, H.; Yu, L.; Cracknell, A. Deep learning based oil palm tree detection and counting for high-resolution remote sensing images. Remote Sens. 2017, 9, 22. [Google Scholar] [CrossRef]
- Santoso, H.; Tani, H.; Wang, X. A simple method for detection and counting of oil palm trees using high-resolution multispectral satellite imagery. Int. J. Remote Sens. 2016, 37, 5122–5134. [Google Scholar] [CrossRef]
- Dos Santos, A.M.; Mitja, D.; Delaître, E.; Demagistri, L.; de Souza Miranda, I.; Libourel, T.; Petit, M. Estimating babassu palm density using automatic palm tree detection with very high spatial resolution satellite images. J. Environ. Manag. 2017, 193, 40–51. [Google Scholar] [CrossRef]
- Al Shidi, R.H.; Kumar, L.; Al-Khatri, S.A.H.; Albahri, M.M.; Alaufi, M.S. Relationship of Date Palm Tree Density to Dubas Bug Ommatissus lybicus Infestation in Omani Orchards. Agriculture 2018, 8, 64. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.; Shanableh, A.; Gibril, M.B.A.; AL-Mansoori, S. Image Segmentation Parameter Selection and Ant Colony Optimization for Date Palm Tree Detection and Mapping from Very-High-Spatial-Resolution Aerial Imagery. Remote Sens. 2018, 10, 1413. [Google Scholar] [CrossRef]
- Tagle Casapia, X.; Falen, L.; Bartholomeus, H.; Cárdenas, R.; Flores, G.; Herold, M.; Honorio Coronado, E.N.; Baker, T.R. Identifying and Quantifying the Abundance of Economically Important Palms in Tropical Moist Forest Using UAV Imagery. Remote Sens. 2020, 12, 9. [Google Scholar] [CrossRef]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Lee, J.S.H.; Wich, S.; Widayati, A.; Koh, L.P. Detecting industrial oil palm plantations on Landsat images with Google Earth Engine. Remote Sens. Appl. Soc. Environ. 2016, 4, 219–224. [Google Scholar] [CrossRef]
- Szantoi, Z.; Smith, S.E.; Strona, G.; Koh, L.P.; Wich, S.A. Mapping orangutan habitat and agricultural areas using Landsat OLI imagery augmented with unmanned aircraft system aerial photography. Int. J. Remote Sens. 2017, 38, 2231–2245. [Google Scholar] [CrossRef]
- De Petris, S.; Boccardo, P.; Borgogno-Mondino, E. Detection and characterization of oil palm plantations through MODIS EVI time series. Int. J. Remote Sens. 2019, 40, 7297–7311. [Google Scholar] [CrossRef]
- Li, W.; Fu, D.; Su, F.; Xiao, Y. Spatial–Temporal Evolution and Analysis of the Driving Force of Oil Palm Patterns in Malaysia from 2000 to 2018. ISPRS Int. J. Geo-Inf. 2020, 9, 280. [Google Scholar] [CrossRef]
- Sarzynski, T.; Giam, X.; Carrasco, L.; Lee, J.S. Combining Radar and Optical Imagery to Map Oil Palm Plantations in Sumatra, Indonesia, Using the Google Earth Engine. Remote Sens. 2020, 17, 1220. [Google Scholar] [CrossRef]
- Lin, T.Y.; Goyal, P.; Girshick, R.B.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Laguna, E. Las especies cultivadas y asilvestradas de grandes palmeras datileras en tierras valencianas. Bouteloua 2006, 1, 6–12. [Google Scholar]
- Carreño Sánchez, E. Diversidad Genética en Especies del Género Phoenix. Ph.D. Thesis, Universidad Miguel Hernández, Alicante, Spain, 2017. [Google Scholar]
- Cartográfica de Canarias, S.A. Información sobre el Mapa de Palmeras Canarias; Technical Report; Consejería de Transición Ecológica, Lucha contra el Cambio Climático y Planificación Territorial del Gobierno de Canarias: Las Palmas, Spain, 2017; Available online: http://opendata.sitcan.es/upload/medio-ambiente/gobcan_medio-ambiente_mapa-palmeras-info.pdf (accessed on 30 September 2019).
- González-Pérez, M.A.; Caujapé-Castells, J.; Sosa, P.A. Molecular evidence of hybridisation between the endemic Phoenix canariensis and the widespread P. dactylifera with Random Amplified Polymorphic DNA (RAPD) markers. Plant Syst. Evol. 2004, 247, 165–175. [Google Scholar] [CrossRef]
- Alemañ García, G. El Palmeral Histórico de la Ciudad de Elche y su Acequia Mayor: Análisis Patrimonial y Afecciones Urbanísticas Generadas. Ph.D. Thesis, Universidad de Alicante, Alicante, Spain, 2016. [Google Scholar]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A Survey of Deep Learning-Based Object Detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar] [CrossRef]
- Zhang, H.; Hong, X. Recent progresses on object detection: A brief review. Multimed. Tools Appl. 2019, 78, 27809–27847. [Google Scholar] [CrossRef]
- Lin, T.Y.; Dollár, P.; Girshick, R.B.; He, K.; Hariharan, B.; Belongie, S.J. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2117–2125. [Google Scholar] [CrossRef]
- Li, K.; Wan, G.; Cheng, G.; Meng, L.; Han, J. Object detection in optical remote sensing images: A survey and a new benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 159, 296–307. [Google Scholar] [CrossRef]
- Hoeser, T.; Kuenzer, C. Object Detection and Image Segmentation with Deep Learning on Earth Observation Data: A Review-Part I: Evolution and Recent Trends. Remote Sens. 2020, 12, 1667. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Guo, Y.; Liu, Y.; Oerlemans, A.; Lao, S.; Wu, S.; Lew, M.S. Deep learning for visual understanding: A review. Neurocomputing 2016, 187, 27–48. [Google Scholar] [CrossRef]
- Gaiser, H.; de Vries, M.; Lacatusu, V.; Vcarpani; Williamson, A.; Liscio, E.; András; Henon, Y.; Jjiun; Gratie, C.; et al. fizyr/keras-retinanet 0.5.1. 2019. Available online: https://github.com/fizyr/keras-retinanet (accessed on 15 July 2019).
- Zlocha, M.; Dou, Q.; Glocker, B. Improving RetinaNet for CT Lesion Detection with Dense Masks from Weak RECIST Labels BT. In Medical Image Computing and Computer Assisted Intervention—MICCAI 2019; Shen, D., Liu, T., Peters, T.M., Staib, L.H., Essert, C., Zhou, S., Yap, P.T., Khan, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 402–410. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Mayor, A.G.; Valdecantos, A.; Vallejo, V.R.; Keizer, J.J.; Bloem, J.; Baeza, J.; González-Pelayo, O.; Machado, A.I.; de Ruiter, P.C. Fire-induced pine woodland to shrubland transitions in Southern Europe may promote shifts in soil fertility. Sci. Total Environ. 2016, 573, 1232–1241. [Google Scholar] [CrossRef] [PubMed]
- Xia, G.; Bai, X.; Ding, J.; Zhu, Z.; Belongie, S.; Luo, J.; Datcu, M.; Pelillo, M.; Zhang, L. DOTA: A Large-Scale Dataset for Object Detection in Aerial Images. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3974–3983. [Google Scholar] [CrossRef]
- Sumbul, G.; Kang, J.; Kreuziger, T.; Marcelino, F.; Costa, H.; Benevides, P.; Caetano, M.; Demir, B. BigEarthNet Dataset with A New Class-Nomenclature for Remote Sensing Image Understanding. arXiv 2020, arXiv:cs.CV/2001.06372. [Google Scholar]
- Tsagkatakis, G.; Aidini, A.; Fotiadou, K.; Giannopoulos, M.; Pentari, A.; Tsakalides, P. Survey of Deep-Learning Approaches for Remote Sensing Observation Enhancement. Sensors 2019, 19, 3929. [Google Scholar] [CrossRef]
- Rodriguez, A.C.; Wegner, J.D. Counting the Uncountable: Deep Semantic Density Estimation from Space; Brox, T., Bruhn, A., Fritz, M., Eds.; Pattern Recognition; Springer International Publishing: Cham, Switzerland, 2019; pp. 351–362. [Google Scholar]
- Wagner, F.H.; Dalagnol, R.; Tagle Casapia, X.; Streher, A.S.; Phillips, O.L.; Gloor, E.; Aragão, L.E.O.C. Regional Mapping and Spatial Distribution Analysis of Canopy Palms in an Amazon Forest Using Deep Learning and VHR Images. Remote Sens. 2020, 12, 2225. [Google Scholar] [CrossRef]
- Milosavljević, I.; El-Shafie, H.A.F.; Faleiro, J.R.; Hoddle, C.D.; Lewis, M.; Hoddle, M.S. Palmageddon: The wasting of ornamental palms by invasive palm weevils, Rhynchophorus spp. J. Pest Sci. 2019, 92, 143–156. [Google Scholar] [CrossRef]
- Goldshtein, E.; Cohen, Y.; Hetzroni, A.; Cohen, Y.; Soroker, V. The spatiotemporal dynamics and range expansion of the red palm weevil in Israel. J. Pest Sci. 2020, 93, 691–702. [Google Scholar] [CrossRef]
- Sanz-Aguilar, A.; Cortés, I.; Gascón, I.; Martínez, O.; Ginard, S.; Tavecchia, G. Modelling pest dynamics under uncertainty in pest detection: The case of the red palm weevil. Biol. Invasions 2020, 22, 1635–1645. [Google Scholar] [CrossRef]
- Rivera, D.; Obón de Castro, C.; Carreño, E.; Inocencio, C.; Alcaraz, F.; Ríos, S.; Palazón, J.A.; Vázquez, L.; Laguna, E. Morphological Systematics of Date-Palm Diversity (Phoenix, Arecaceae) in Western Europe and Some Preliminary Molecular Results. In Proceedings of the V International Symposium on Taxonomy of Cultivated Plants, Wageningen, The Netherlands, 15–19 October 2007; Number 799. pp. 97–104. [Google Scholar] [CrossRef]
- Laguna, E.; Rivera, D.; Obón, C.; Alcaraz, E. Phoenix canariensis var. porphyrococca en el Levante español. Bouteloua 2012, 9, 3–10. [Google Scholar]
- Laguna, E.; (Generalitat Valenciana, Valencia, Spain). Personal communication, 2020.
- Rivera, D.; Abellán, J.; Palazón, J.A.; Obón, C.; Alcaraz, F.; Carreño, E.; Laguna, E.; Ruiz, A.; Johnson, D. Modelling ancient areas for date palms (Phoenix species: Arecaceae): Bayesian analysis of biological and cultural evidence. Bot. J. Linn. Soc. 2020, 193, 228–262. [Google Scholar] [CrossRef]
- Muscarella, R.; Emilio, T.; Phillips, O.L.; Lewis, S.L.; Slik, F.; Baker, W.J.; Couvreur, T.L.P.; Eiserhardt, W.L.; Svenning, J.C.; Affum-Baffoe, K.; et al. The global abundance of tree palms. Glob. Ecol. Biogeogr. 2020, 1–20. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Computer Vision–ECCV 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Instituto Nacional de Estadística (INE). Anuario Estadístico de España 2005. 2005. Available online: https://www.ine.es/prodyser/pubweb/anuario05/anu05_1entorno.pdf (accessed on 10 February 2020).











| Measure | Formula |
|---|---|
| Precision (P) | |
| Recall (R) | |
| Average Precision () | |
| Dice similarity coefficient () |
| Resulting Model | R | P | ||
|---|---|---|---|---|
| A0-M1 | 0.6665 | 0.6204 | 0.7141 | 0.6431 |
| A1-M2 | 0.6766 | 0.7810 | 0.8611 | 0.7251 |
| A2-M2 | 0.7329 | 0.6402 | 0.8140 | 0.6834 |
| A3-M3 | 0.7048 | 0.7046 | 0.8311 | 0.7047 |
| Approach | Model | R | P | ||
|---|---|---|---|---|---|
| A1 | M1 | 0.2248 | 0.9078 | 0.3706 | 0.3603 |
| M2 | 0.6766 | 0.7810 | 0.8611 | 0.7251 | |
| A2 | M1 | 0.1552 | 0.1956 | 0.0609 | 0.1730 |
| M2 | 0.7329 | 0.6402 | 0.8140 | 0.6834 | |
| A3 | M1 | 0.1552 | 0.1956 | 0.0609 | 0.1730 |
| M2 | 0.2509 | 0.9108 | 0.4069 | 0.3934 | |
| M3 | 0.7048 | 0.7046 | 0.8311 | 0.7047 |
| Scene | R | P | ||||||
|---|---|---|---|---|---|---|---|---|
| A1P | A1P+N | A1P | A1P+N | A1P | A1P+N | A1P | A1P+N | |
| Plantation | 0.5479 | 0.5762 | 0.8705 | 0.8881 | 0.8020 | 0.8478 | 0.6725 | 0.6989 |
| Orchard | 0.4992 | 0.4656 | 0.7850 | 0.8673 | 0.6519 | 0.6866 | 0.6103 | 0.6059 |
| Garden | 0.4578 | 0.4271 | 0.7951 | 0.8045 | 0.6081 | 0.5839 | 0.5810 | 0.5580 |
| Multiple 1 | 0.7450 | 0.4833 | 0.0734 | 0.3757 | 0.6875 | 0.5000 | 0.1336 | 0.4228 |
| Multiple 2 | 0.7350 | 0.4832 | 0.1401 | 0.7616 | 0.3618 | 0.6082 | 0.2353 | 0.5913 |
| Multiple 3 | 0.7259 | 0.5176 | 0.0422 | 0.2931 | 0.0781 | 0.3441 | 0.0798 | 0.3743 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Culman, M.; Delalieux, S.; Van Tricht, K. Individual Palm Tree Detection Using Deep Learning on RGB Imagery to Support Tree Inventory. Remote Sens. 2020, 12, 3476. https://doi.org/10.3390/rs12213476
Culman M, Delalieux S, Van Tricht K. Individual Palm Tree Detection Using Deep Learning on RGB Imagery to Support Tree Inventory. Remote Sensing. 2020; 12(21):3476. https://doi.org/10.3390/rs12213476
Chicago/Turabian StyleCulman, María, Stephanie Delalieux, and Kristof Van Tricht. 2020. "Individual Palm Tree Detection Using Deep Learning on RGB Imagery to Support Tree Inventory" Remote Sensing 12, no. 21: 3476. https://doi.org/10.3390/rs12213476
APA StyleCulman, M., Delalieux, S., & Van Tricht, K. (2020). Individual Palm Tree Detection Using Deep Learning on RGB Imagery to Support Tree Inventory. Remote Sensing, 12(21), 3476. https://doi.org/10.3390/rs12213476