A Phase Filtering Method with Scale Recurrent Networks for InSAR




Abstract
1. Introduction
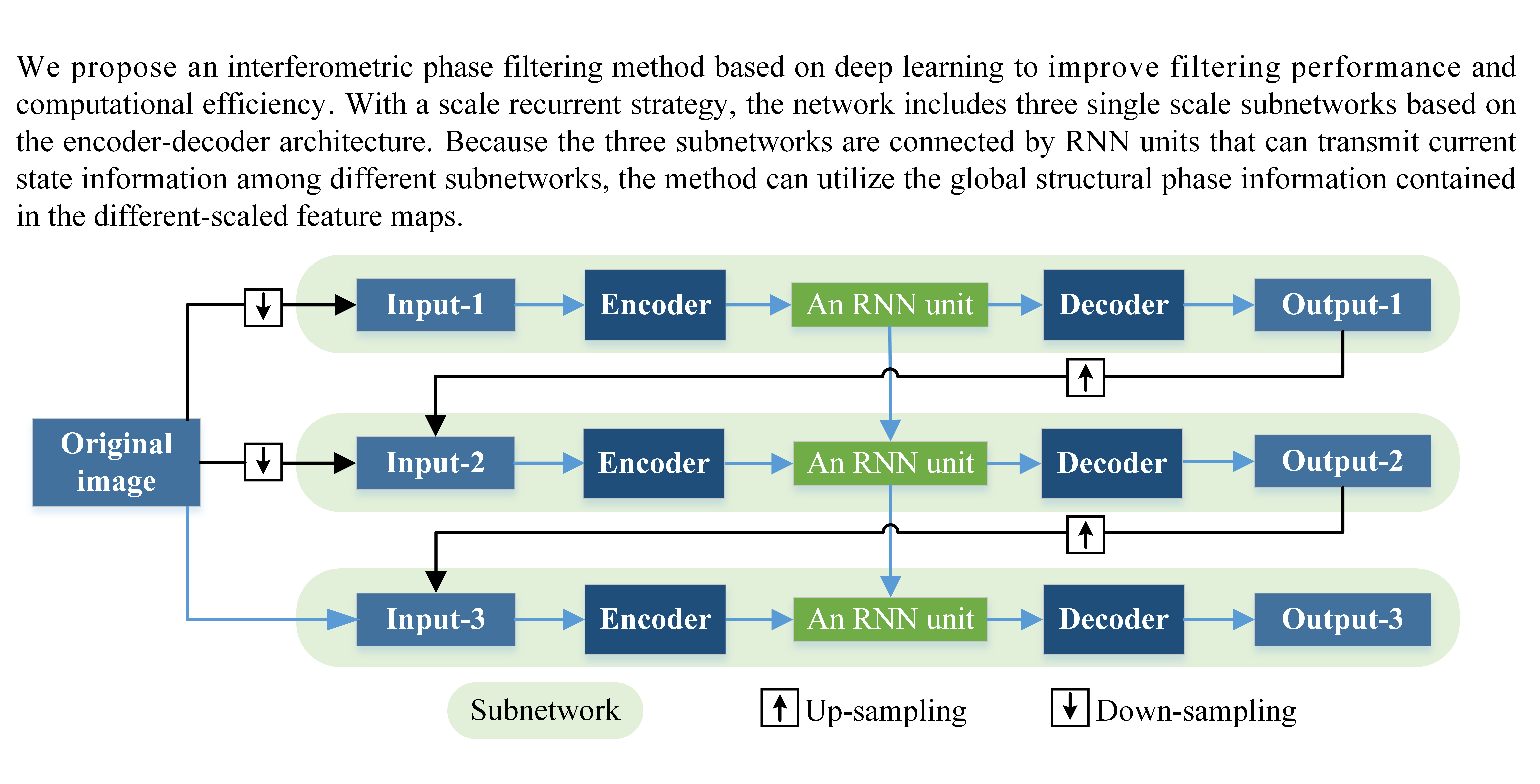
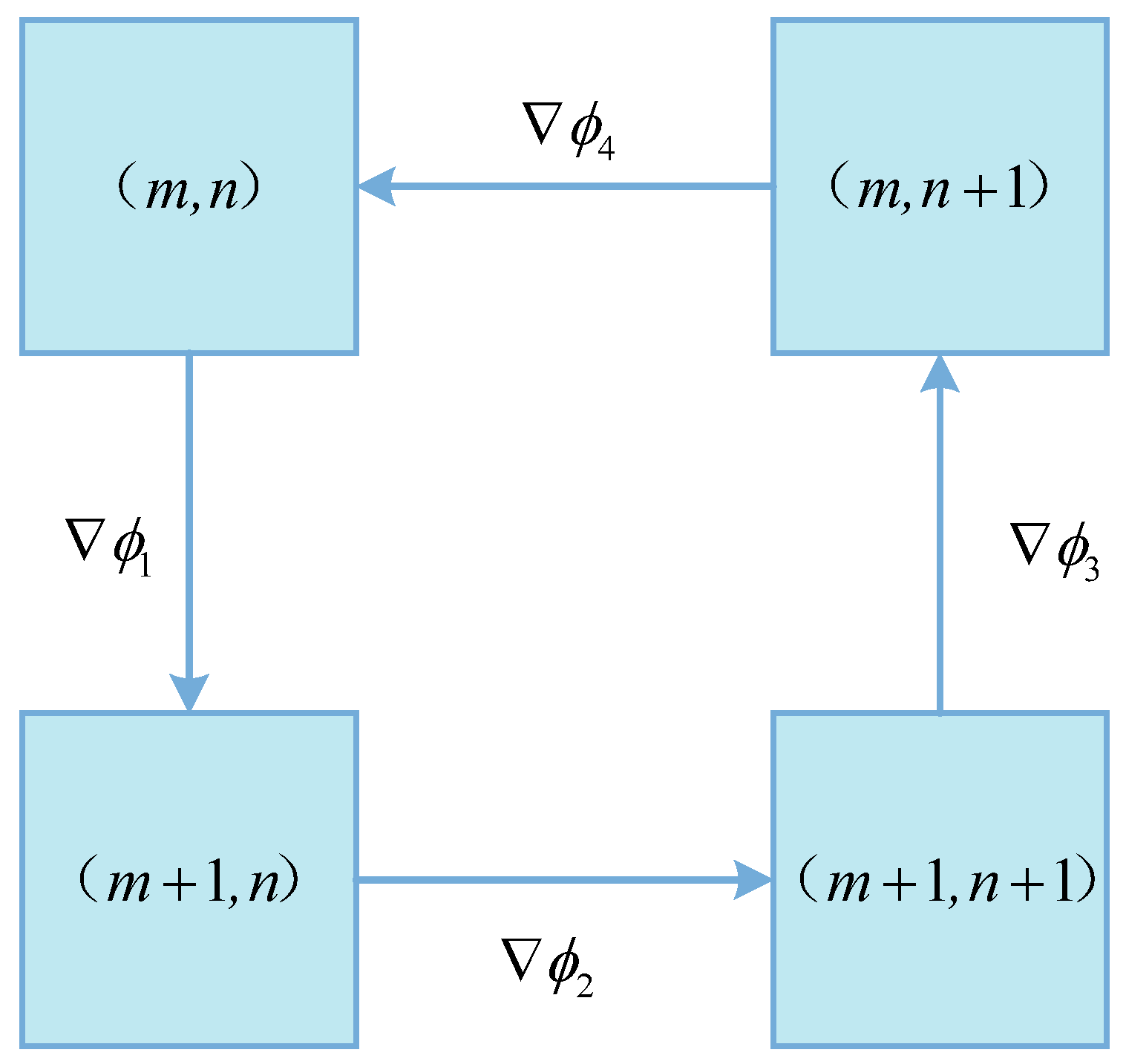
2. Problem Description
3. Materials and Methods
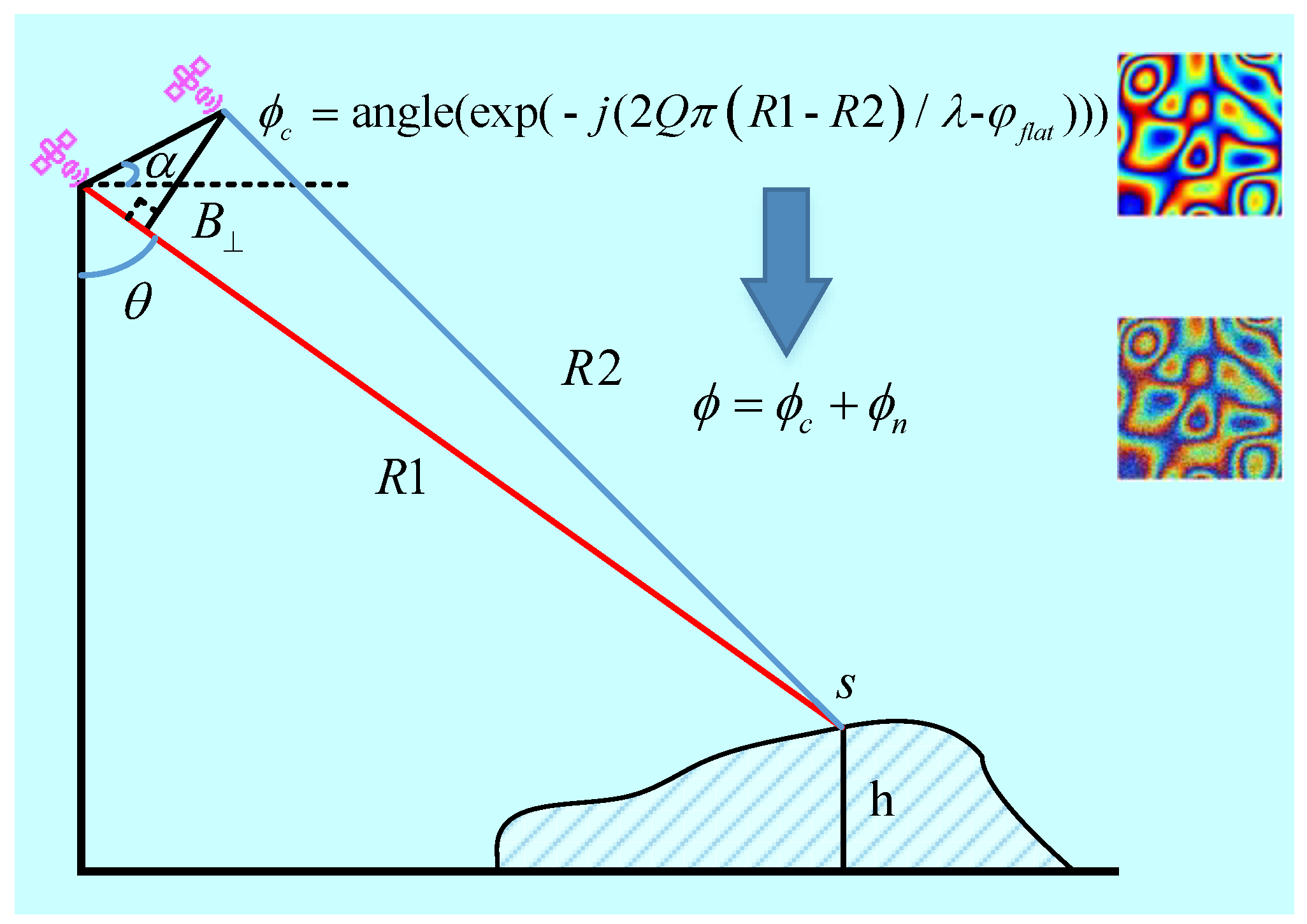
3.1. Dataset
- Generate an initial Gaussian distributed random matrix. The size of the initial matrix is for our simulation experiments.
- Enlarge the matrix to a larger matrix ( pixels for our experiments) using bicubic interpolation and scale its range of values to a larger range (0 to 20 rad for our simulation experiments). The large matrix is considered as the unwrapped phase.
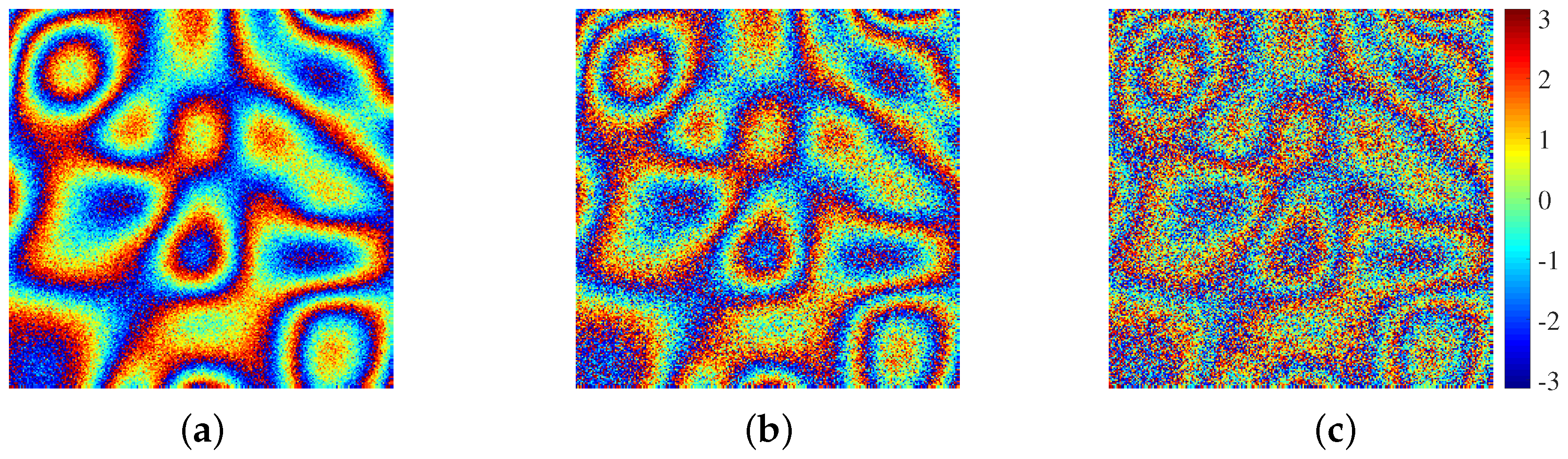
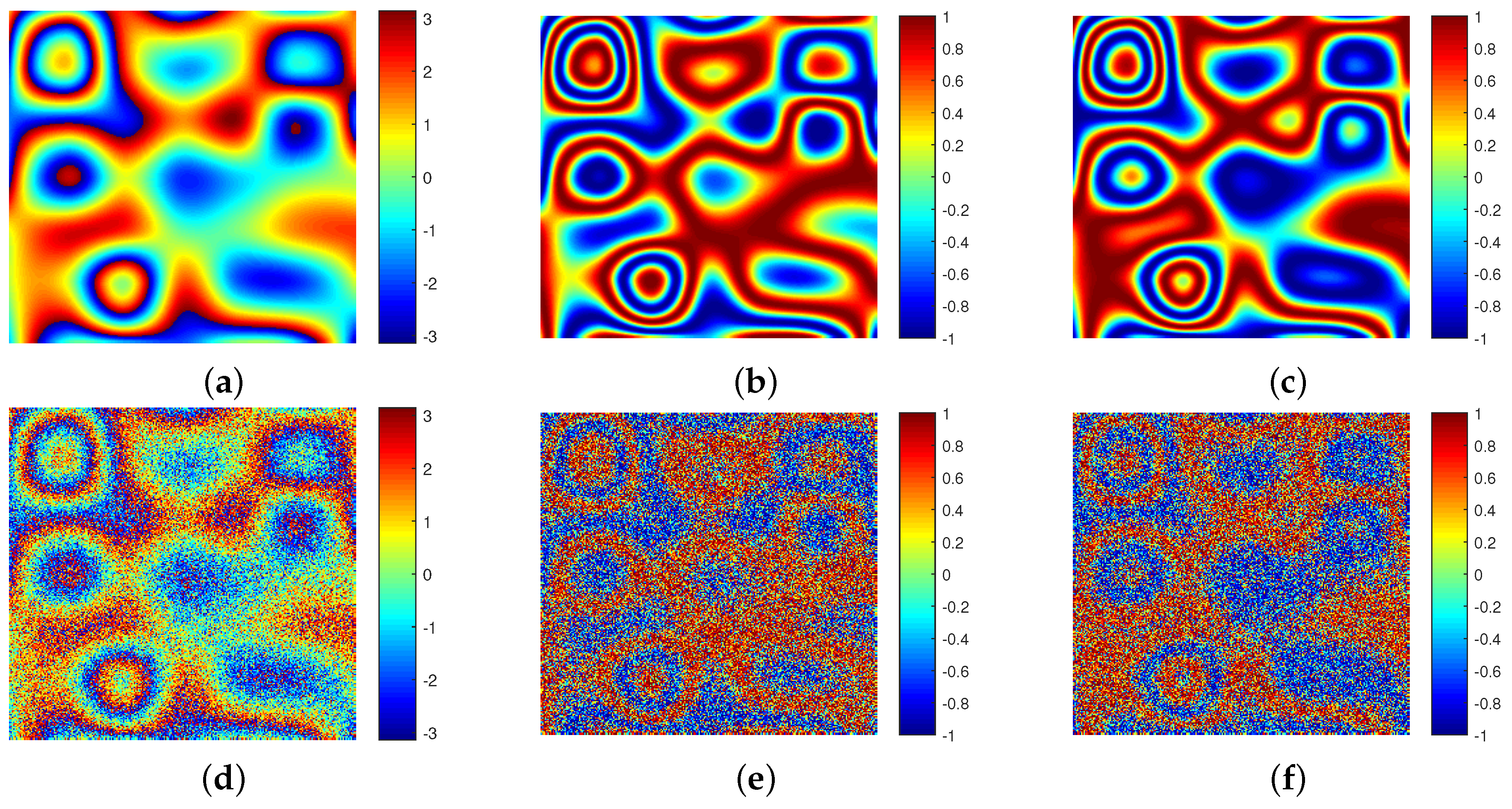
- The real and imaginary parts of the clean and noisy interferometric phase are generated according to Equation (5).
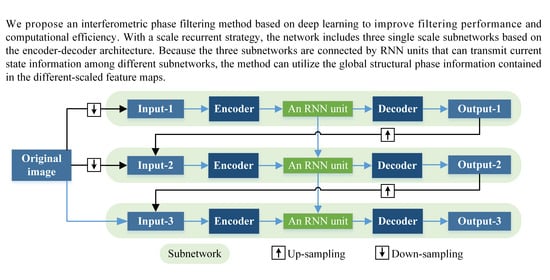
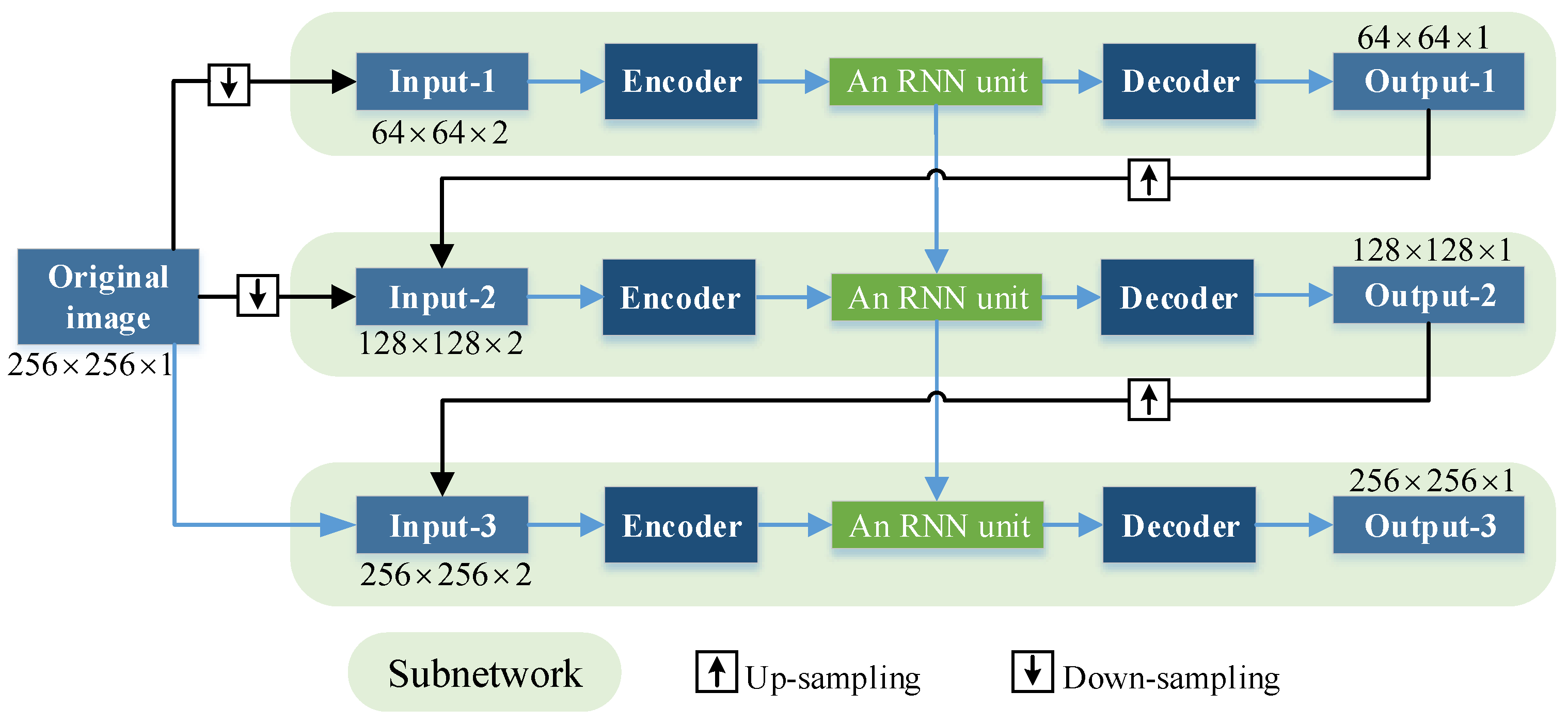
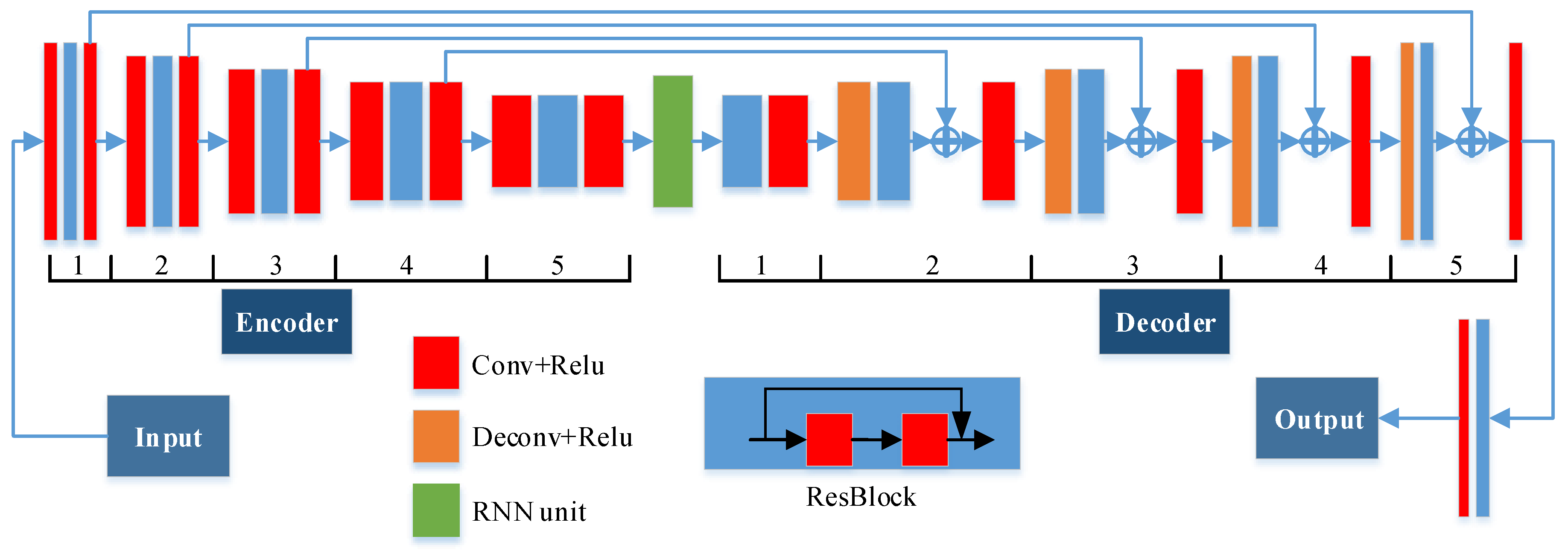
3.2. Proposed Method
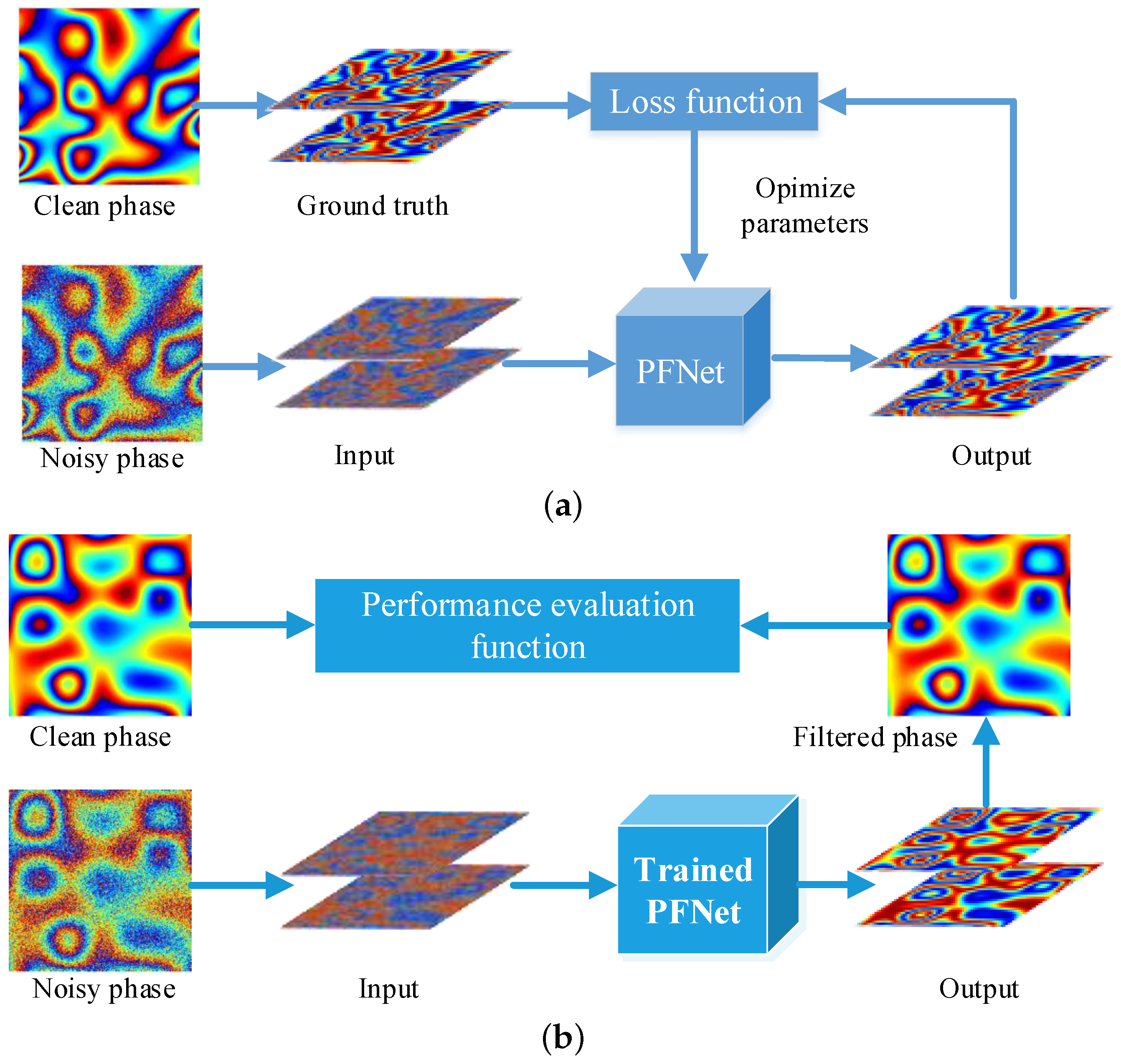
3.3. Loss Function
3.4. Performance Evaluation Index
4. Results and Discussion
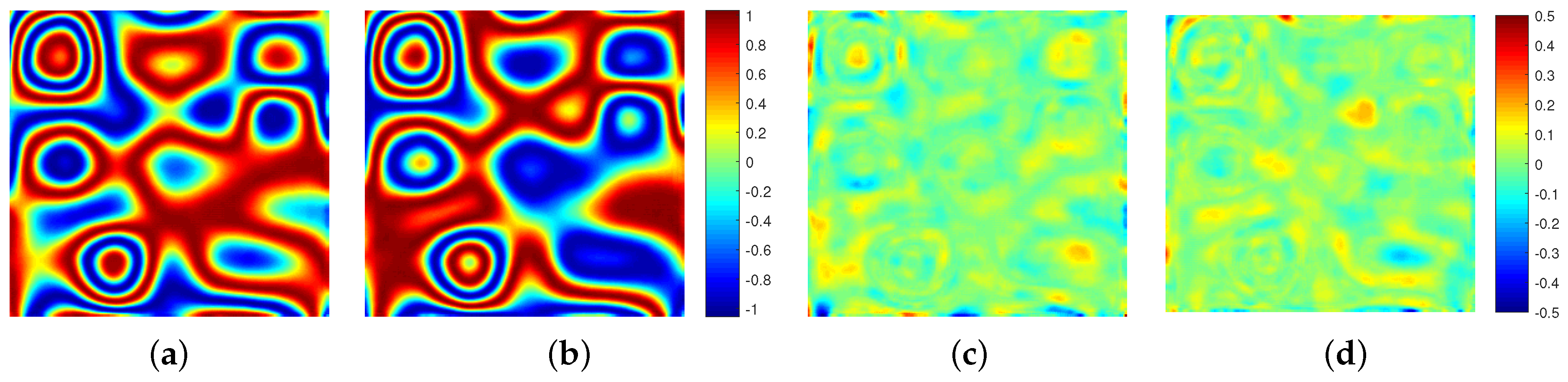
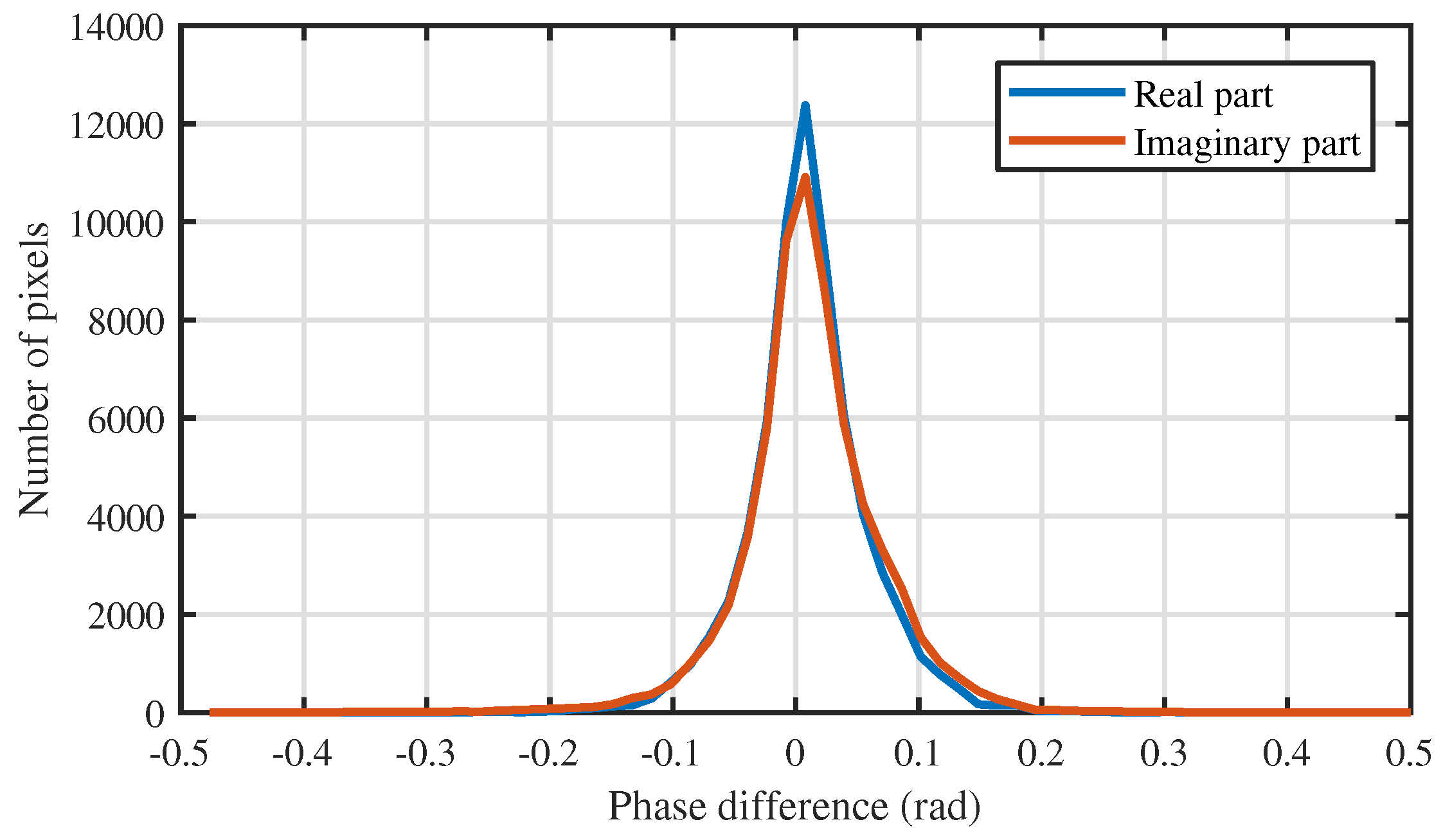
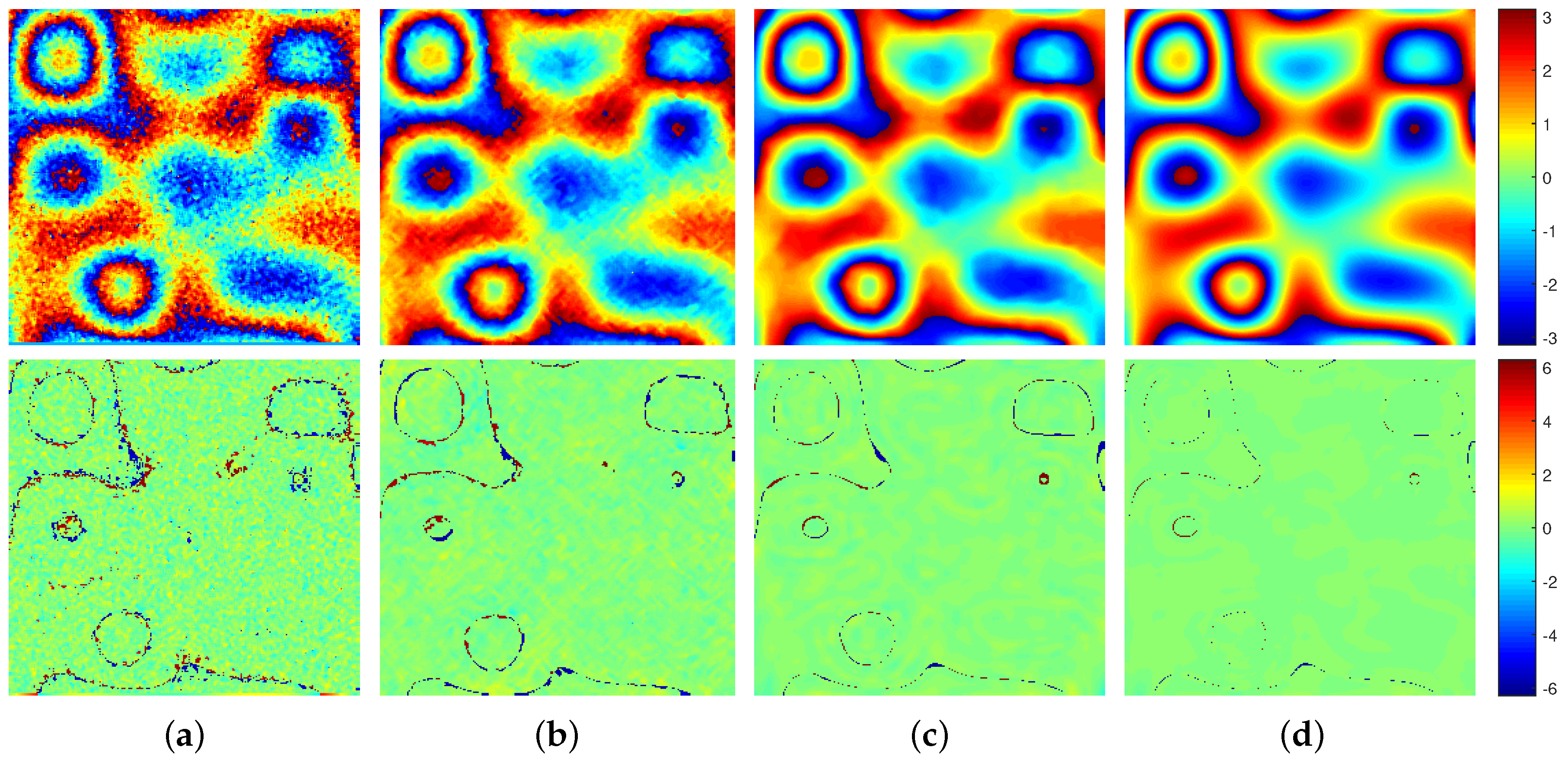
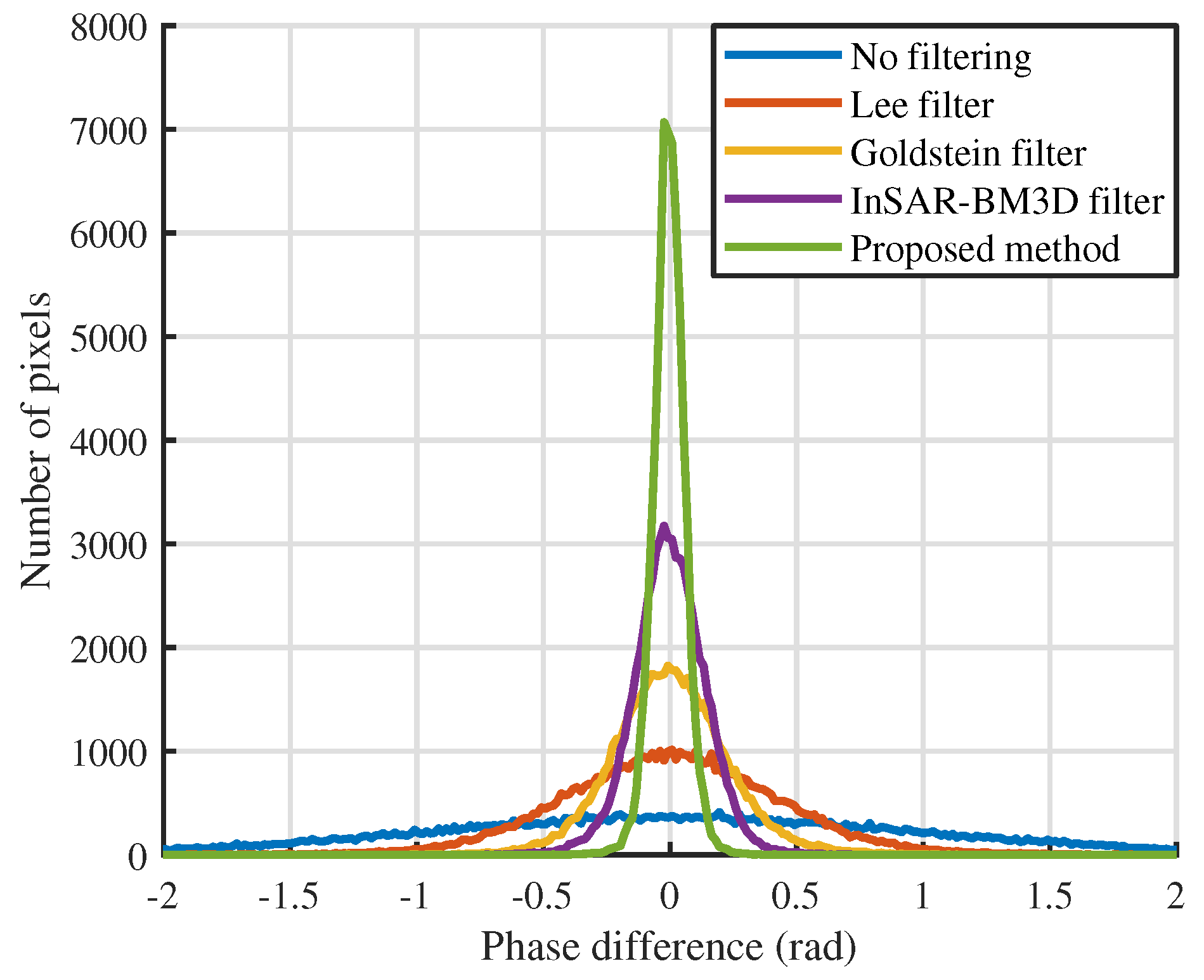
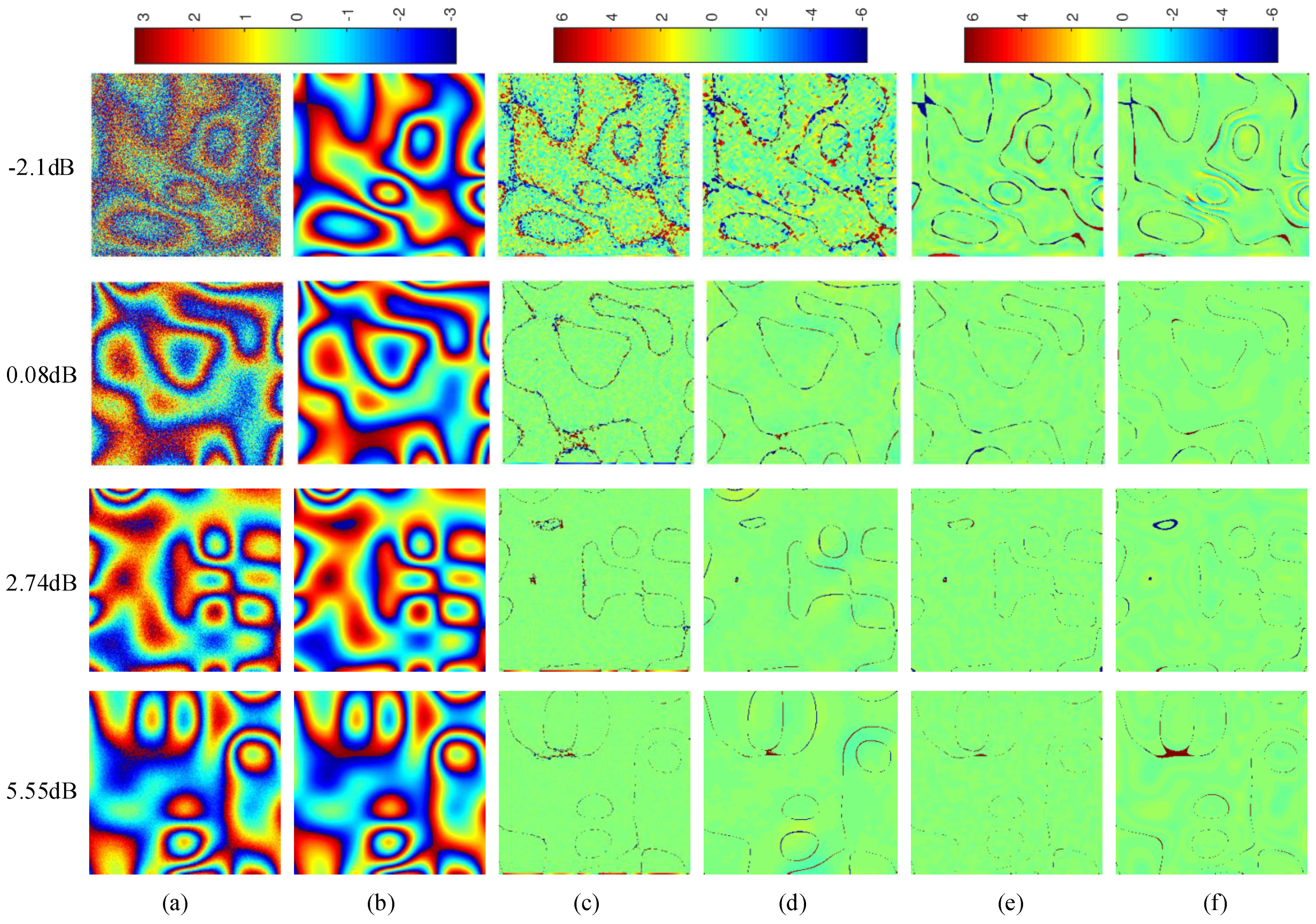
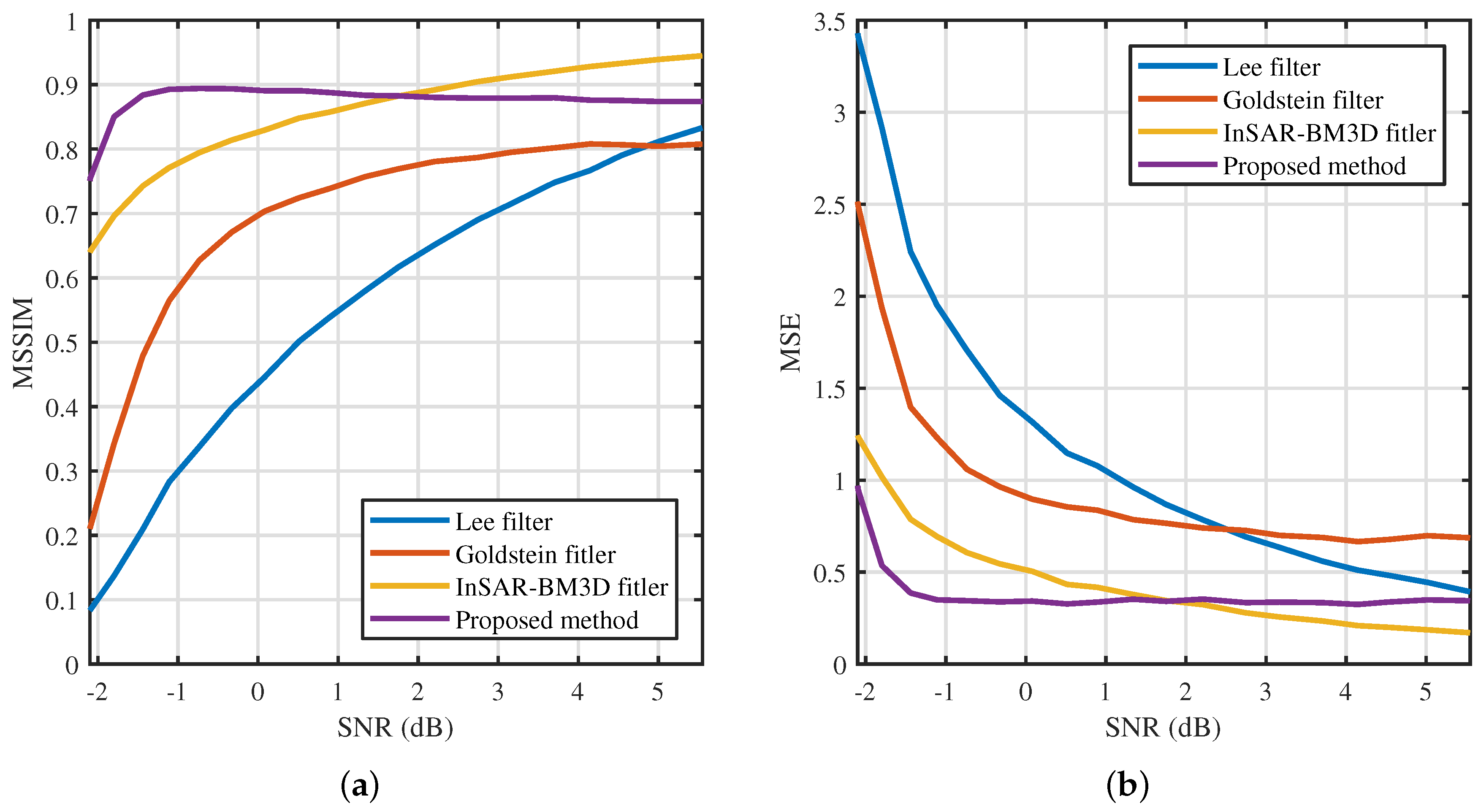
4.1. Experiments on Simulated Data
4.2. Experiments on Real Data
4.2.1. SIR-C/X-SAR Data
4.2.2. TerraSAR-X Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, Y.; Montazeri, S.; Ge, N. A Review of Ten-Year Advances of Multi-Baseline SAR Interferometry Using TerraSAR-X Data. Remote Sens. 2018, 10, 1374. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, H.; Dong, Z.; Wu, M. Modified patch-based locally optimal Wiener method for interferometric SAR phase filtering. ISPRS J. Photogramm. Remote Sens. 2016, 114, 10–23. [Google Scholar] [CrossRef]
- Lee, J.S.; Papathanassiou, K.P.; Ainsworth, T.L.; Grunes, M.R.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Vasile, G.; Trouvé, E.; Lee, J.S.; Buzuloiu, V. Intensity-driven adaptive-neighborhood technique for polarimetric and interferometric SAR parameters estimation. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1609–1621. [Google Scholar] [CrossRef]
- Fu, S.; Long, X.; Yang, X.; Yu, Q. Directionally adaptive filter for synthetic aperture radar interferometric phase images. IEEE Trans. Geosci. Remote Sens. 2012, 51, 552–559. [Google Scholar] [CrossRef]
- Chao, C.F.; Chen, K.S.; Lee, J.S. Refined filtering of interferometric phase from InSAR data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5315–5323. [Google Scholar] [CrossRef]
- Yu, Q.; Yang, X.; Fu, S.; Liu, X.; Sun, X. An adaptive contoured window filter for interferometric synthetic aperture radar. IEEE Geosci. Remote Sens. Lett. 2007, 4, 23–26. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Baran, I.; Stewart, M.P.; Kampes, B.M.; Perski, Z.; Lilly, P. A modification to the Goldstein radar interferogram filter. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2114–2118. [Google Scholar] [CrossRef]
- Trouve, E.; Nicolas, J.M.; Maitre, H. Improving phase unwrapping techniques by the use of local frequency estimates. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1963–1972. [Google Scholar] [CrossRef]
- Song, R.; Guo, H.; Liu, G.; Perski, Z.; Fan, J. Improved Goldstein SAR interferogram filter based on empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2013, 11, 399–403. [Google Scholar] [CrossRef]
- Abdallah, W.B.; Abdelfattah, R. Two-dimensional wavelet algorithm for interferometric synthetic aperture radar phase filtering enhancement. J. Appl. Remote Sens. 2015, 9, 096061. [Google Scholar] [CrossRef]
- Lopez-Martinez, C.; Fabregas, X. Modeling and reduction of SAR interferometric phase noise in the wavelet domain. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2553–2566. [Google Scholar] [CrossRef]
- Zha, X.; Fu, R.; Dai, Z.; Liu, B. Noise reduction in interferograms using the wavelet packet transform and wiener filtering. IEEE Geosci. Remote Sens. Lett. 2008, 5, 404–408. [Google Scholar]
- Fang, D.; Lv, X.; Wang, Y.; Lin, X.; Qian, J. A sparsity-based InSAR phase denoising algorithm using nonlocal wavelet shrinkage. Remote Sens. 2016, 8, 830. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. A review of image denoising algorithms, with a new one. Multiscale Model. Simul. 2005, 4, 490–530. [Google Scholar] [CrossRef]
- Parrilli, S.; Poderico, M.; Angelino, C.V.; Verdoliva, L. A nonlocal SAR image denoising algorithm based on LLMMSE wavelet shrinkage. IEEE Trans. Geosci. Remote Sens. 2011, 50, 606–616. [Google Scholar] [CrossRef]
- Cozzolino, D.; Parrilli, S.; Scarpa, G.; Poggi, G.; Verdoliva, L. Fast adaptive nonlocal SAR despeckling. IEEE Geosci. Remote Sens. Lett. 2013, 11, 524–528. [Google Scholar] [CrossRef]
- Deledalle, C.A.; Denis, L.; Tupin, F. NL-InSAR: Nonlocal interferogram estimation. IEEE Trans. Geosci. Remote Sens. 2010, 49, 1441–1452. [Google Scholar] [CrossRef]
- Chen, R.; Yu, W.; Wang, R.; Liu, G.; Shao, Y. Interferometric phase denoising by pyramid nonlocal means filter. IEEE Geosci. Remote Sens. Lett. 2013, 10, 826–830. [Google Scholar] [CrossRef]
- Lin, X.; Li, F.; Meng, D.; Hu, D.; Ding, C. Nonlocal SAR interferometric phase filtering through higher order singular value decomposition. IEEE Geosci. Remote Sens. Lett. 2014, 12, 806–810. [Google Scholar] [CrossRef]
- Su, X.; Deledalle, C.A.; Tupin, F.; Sun, H. Two-step multitemporal nonlocal means for synthetic aperture radar images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6181–6196. [Google Scholar]
- Sica, F.; Reale, D.; Poggi, G.; Verdoliva, L.; Fornaro, G. Nonlocal adaptive multilooking in SAR multipass differential interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1727–1742. [Google Scholar] [CrossRef]
- Baier, G.; Rossi, C.; Lachaise, M.; Zhu, X.X.; Bamler, R. A Nonlocal InSAR Filter for High-Resolution DEM Generation From TanDEM-X Interferograms. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6469–6483. [Google Scholar] [CrossRef]
- Sica, F.; Cozzolino, D.; Zhu, X.X.; Verdoliva, L.; Poggi, G. INSAR-BM3D: A nonlocal filter for SAR interferometric phase restoration. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3456–3467. [Google Scholar] [CrossRef]
- Tao, X.; Gao, H.; Shen, X.; Wang, J.; Jia, J. Scale-recurrent network for deep image deblurring. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 174–8182. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Nah, S.; Hyun Kim, T.; Mu Lee, K. Deep multi-scale convolutional neural network for dynamic scene deblurring. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3883–3891. [Google Scholar]
- Hirose, A. Complex-Valued Neural Networks; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 400. [Google Scholar]
- Wang, P.; Zhang, H.; Patel, V.M. SAR image despeckling using a convolutional neural network. IEEE Signal Process. Lett. 2017, 24, 1763–1767. [Google Scholar] [CrossRef]
- Zhou, Y.; Shi, J.; Yang, X.; Wang, C.; Kumar, D.; Wei, S.; Zhang, X. Deep multi-scale recurrent network for synthetic aperture radar images despeckling. Remote Sens. 2019, 11, 2462. [Google Scholar] [CrossRef]
- Zhang, Q.; Yuan, Q.; Li, J.; Yang, Z.; Ma, X. Learning a dilated residual network for SAR image despeckling. Remote Sens. 2018, 10, 196. [Google Scholar] [CrossRef]
- Mukherjee, S.; Zimmer, A.; Kottayil, N.K.; Sun, X.; Ghuman, P.; Cheng, I. CNN-Based InSAR Denoising and Coherence Metric. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar]
- Sun, X.; Zimmer, A.; Mukherjee, S.; Kottayil, N.K.; Ghuman, P.; Cheng, I. DeepInSAR—A Deep Learning Framework for SAR Interferometric Phase Restoration and Coherence Estimation. Remote Sens. 2020, 12, 2340. [Google Scholar] [CrossRef]
- Anantrasirichai, N.; Biggs, J.; Albino, F.; Hill, P.; Bull, D. Application of machine learning to classification of volcanic deformation in routinely generated InSAR data. J. Geophys. Res. Solid Earth 2018, 123, 6592–6606. [Google Scholar] [CrossRef]
- Bamler, R.; Hartl, P. Synthetic aperture radar interferometry. Inverse Probl. 1998, 14, R1. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic aperture radar interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Wang, K.; Li, Y.; Kemao, Q.; Di, J.; Zhao, J. One-step robust deep learning phase unwrapping. Opt. Express 2019, 27, 15100–15115. [Google Scholar] [CrossRef]
- Zhou, L.; Yu, H.; Lan, Y. Deep Convolutional Neural Network-Based Robust Phase Gradient Estimation for Two-Dimensional Phase Unwrapping Using SAR Interferograms. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 4653–4665. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Lei, T.; Zhang, Y.; Wang, S.I.; Dai, H.; Artzi, Y. Simple recurrent units for highly parallelizable recurrence. arXiv 2017, arXiv:1709.02755. [Google Scholar]
- Matthew, D.; Fergus, R. Visualizing and understanding convolutional neural networks. In Proceedings of the 13th European Conference Computer Vision and Pattern Recognition, Zurich, Switzerland, 6–12 September 2014; pp. 6–12. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Mao, X.; Shen, C.; Yang, Y.B. Image restoration using very deep convolutional encoder-decoder networks with symmetric skip connections. In Proceedings of the 30th Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 2802–2810. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef]
- Zhu, X.; Milanfar, P. Automatic Parameter Selection for Denoising Algorithms Using a No-Reference Measure of Image Content. IEEE Trans. Image Process. 2010, 19, 3116–3132. [Google Scholar]
- Glorot, X.; Bengio, Y. Understanding the difficulty of training deep feedforward neural networks. In Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Chia Laguna Resort, Sardinia, Italy, 13–15 May 2010; pp. 249–256. [Google Scholar]
- Yao, Y.; Rosasco, L.; Caponnetto, A. On early stopping in gradient descent learning. Constr. Approx. 2007, 26, 289–315. [Google Scholar] [CrossRef]
- Raskutti, G.; Wainwright, M.J.; Yu, B. Early stopping and non-parametric regression: An optimal data-dependent stopping rule. J. Mach. Learn. Res. 2014, 15, 335–366. [Google Scholar]
- Coltelli, M.; Fornaro, G.; Franceschetti, G.; Lanari, R.; Migliaccio, M.; Moreira, J.R.; Papathanassiou, K.P.; Puglisi, G.; Riccio, D.; Schwabisch, M. On the survey of volcanic sites: The SIR-C/X-SAR interferometry. In Proceedings of the IGARSS’96, 1996 International Geoscience and Remote Sensing Symposium, Lincoln, NE, USA, 31–31 May 1996; Volume 1, pp. 350–352. [Google Scholar]
- Pitz, W.; Miller, D. The TerraSAR-X satellite. IEEE Trans. Geosci. Remote Sens. 2010, 48, 615–622. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Layer Name | Filter Size | # Channels | Stride | Padding | Output Size |
|---|---|---|---|---|---|---|
| Encoder block 1 | Conv + Relu | 8 | 1 | 2 | ||
| Resblock | 8 | 1 | 2 | |||
| Conv + Relu | 8 | 1 | 2 | |||
| Encoder block 2 | Conv + Relu | 16 | 2 | 2 | ||
| Resblock | 16 | 1 | 2 | |||
| Conv + Relu | 16 | 1 | 2 | |||
| Encoder block 3 | Conv + Relu | 32 | 2 | 2 | ||
| Resblock | 32 | 1 | 2 | |||
| Conv + Relu | 32 | 1 | 2 | |||
| Encoder block 4 | Conv + Relu | 64 | 2 | 2 | ||
| Resblock | 64 | 1 | 2 | |||
| Conv + Relu | 64 | 1 | 2 | |||
| Encoder block 5 | Conv + Relu | 128 | 2 | 2 | ||
| Resblock | 128 | 1 | 2 | |||
| Conv + Relu | 128 | 1 | 2 | |||
| Decoder block 1 | RNN unit | - | - | - | - | |
| Resblock | 128 | 1 | 2 | |||
| Conv + Relu | 128 | 1 | 2 | |||
| Decoder block 2 | Deconv + Relu | 64 | 2 | 1 | ||
| Resblock | 64 | 1 | 2 | |||
| Conv + Relu | 64 | 1 | 2 | |||
| Decoder block 3 | Deconv + Relu | 32 | 2 | 1 | ||
| Resblock | 32 | 1 | 2 | |||
| Conv + Relu | 32 | 1 | 2 | |||
| Decoder block 4 | Deconv + Relu | 16 | 2 | 1 | ||
| Resblock | 16 | 1 | 2 | |||
| Conv + Relu | 16 | 1 | 2 | |||
| Decoder block 5 | Deconv + Relu | 8 | 2 | 1 | ||
| Resblock | 8 | 1 | 2 | |||
| Conv + Relu | 8 | 1 | 2 | |||
| - | ResBlock | 8 | 1 | 2 | ||
| - | Conv + Relu | 1 | 1 | 2 |
| Method | NOR | MSSIM | MSE | (s) |
|---|---|---|---|---|
| No filtering | 10,572 | 0.0251 | 4.6494 | - |
| Lee Filter | 369 | 0.2008 | 2.3631 | 3.3 |
| Goldstein Filter | 16 | 0.4617 | 1.4839 | 4.1 |
| InSAR-BM3D Filter | 0.012 | 0.7366 | 0.8227 | 6.9 |
| Proposed method | 0.004 | 0.8811 | 0.4019 | 0.015 |
| # Training Samples | MSSIM | MSE |
|---|---|---|
| 20,000 | 0.8811 | 0.4019 |
| 10,000 | 0.8652 | 0.4645 |
| 5000 | 0.8434 | 0.5392 |
| 2500 | 0.8374 | 0.5502 |
| Method | MSSIM | RMSE |
|---|---|---|
| DeepInSAR | 0.8666 | 0.8536 |
| Proposed Method | 0.8606 | 0.6703 |
| Method | NOR | PRR (%) | Metric Q | |
|---|---|---|---|---|
| No filtering | 218,168 | 0 | 0.4776 | - |
| Lee Filter | 36,583 | 83.23 | 21.2007 | 50.9 |
| Goldstein Filter | 14,911 | 93.17 | 38.3316 | 68.1 |
| InSAR-BM3D Filter | 1219 | 99.44 | 46.5475 | 125.2 |
| Proposed method | 11,306 | 94.82 | 79.4867 | 0.043 |
| Method | NOR | PRR (%) | Metric Q | |
|---|---|---|---|---|
| No filtering | 327,488 | 0 | 18.4225 | - |
| Lee Filter | 199,399 | 39.11 | 19.6906 | 425.4 |
| Goldstein Filter | 139,356 | 57.45 | 18.4413 | 605.9 |
| InSAR-BM3D Filter | 27,900 | 91.48 | 21.8857 | 1078.1 |
| Proposed method | 69,455 | 78.79 | 25.1338 | 0.398 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pu, L.; Zhang, X.; Zhou, Z.; Shi, J.; Wei, S.; Zhou, Y. A Phase Filtering Method with Scale Recurrent Networks for InSAR. Remote Sens. 2020, 12, 3453. https://doi.org/10.3390/rs12203453
Pu L, Zhang X, Zhou Z, Shi J, Wei S, Zhou Y. A Phase Filtering Method with Scale Recurrent Networks for InSAR. Remote Sensing. 2020; 12(20):3453. https://doi.org/10.3390/rs12203453
Chicago/Turabian StylePu, Liming, Xiaoling Zhang, Zenan Zhou, Jun Shi, Shunjun Wei, and Yuanyuan Zhou. 2020. "A Phase Filtering Method with Scale Recurrent Networks for InSAR" Remote Sensing 12, no. 20: 3453. https://doi.org/10.3390/rs12203453
APA StylePu, L., Zhang, X., Zhou, Z., Shi, J., Wei, S., & Zhou, Y. (2020). A Phase Filtering Method with Scale Recurrent Networks for InSAR. Remote Sensing, 12(20), 3453. https://doi.org/10.3390/rs12203453