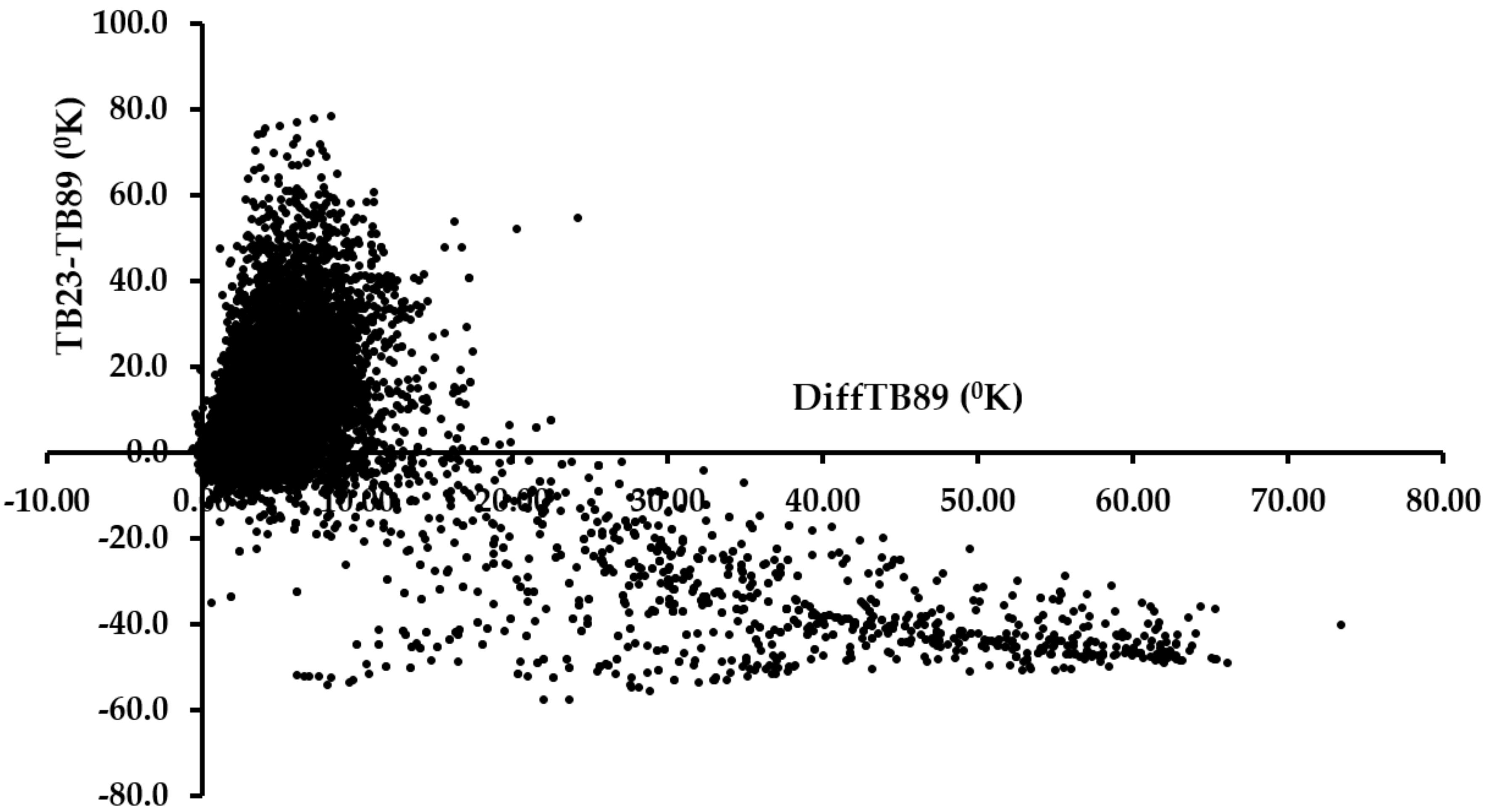
Figure 1.
Scatterplot between the difference in Global Precipitation Measurement (GPM) Microwave Imager (GMI) brightness temperature at 23 GHz and 89 GHz (TB23-TB89) and the vertical and horizontal polarization brightness temperature difference at 89 GHz (DiffTB89).
Figure 1.
Scatterplot between the difference in Global Precipitation Measurement (GPM) Microwave Imager (GMI) brightness temperature at 23 GHz and 89 GHz (TB23-TB89) and the vertical and horizontal polarization brightness temperature difference at 89 GHz (DiffTB89).
Figure 2.
Boxplot of summary statistics—minimum, 25th percentile, median, mean, 75th percentile and maximum—for GMI vertical and horizontal polarization brightness temperature difference at (a) 166 GHz (DiffTB166) and (b) 89 GHz (DiffTBTB89) for the snowfall and no-snowfall sample. The green line indicates the mean value and the red line indicates the median value.
Figure 2.
Boxplot of summary statistics—minimum, 25th percentile, median, mean, 75th percentile and maximum—for GMI vertical and horizontal polarization brightness temperature difference at (a) 166 GHz (DiffTB166) and (b) 89 GHz (DiffTBTB89) for the snowfall and no-snowfall sample. The green line indicates the mean value and the red line indicates the median value.
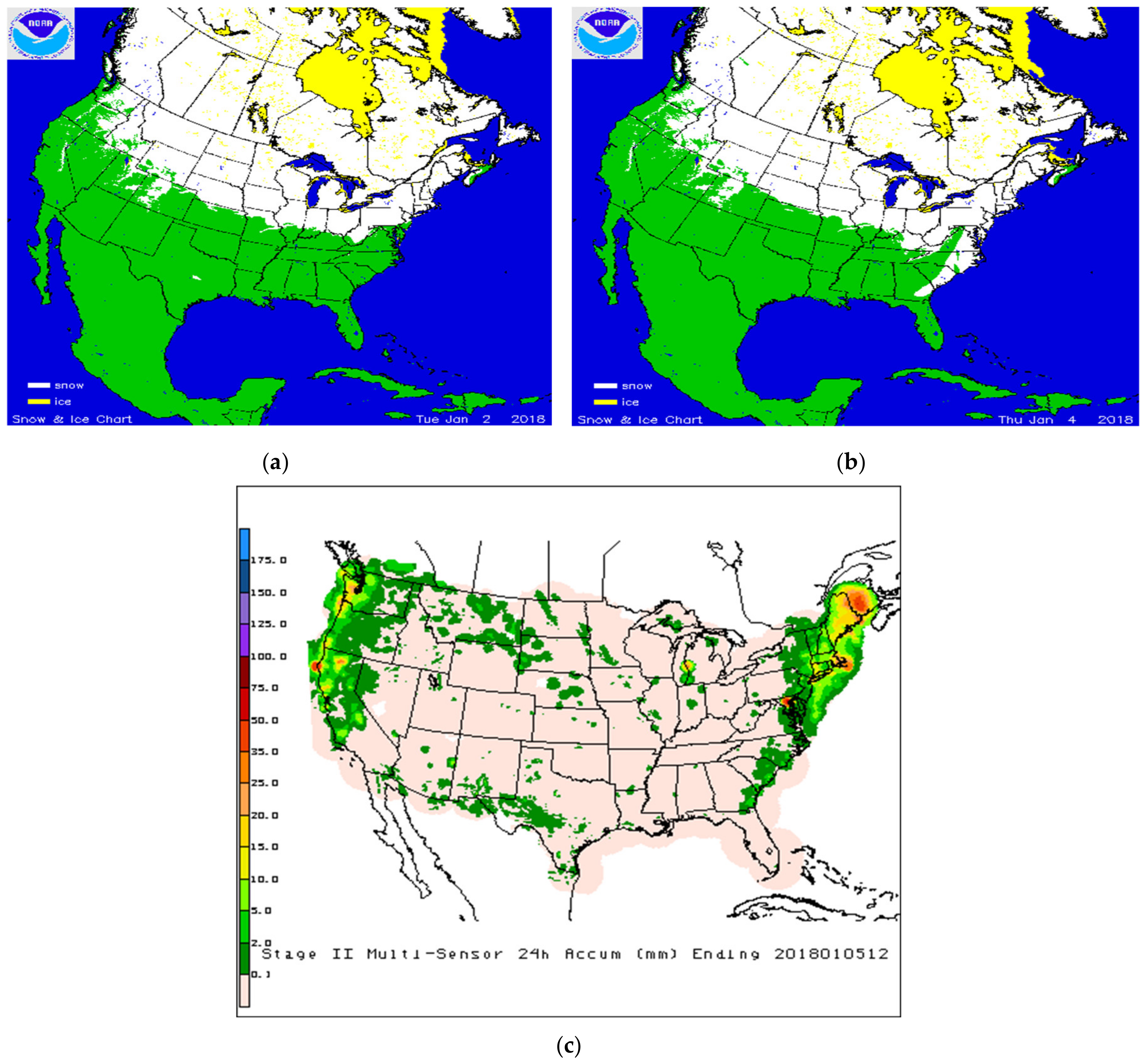
Figure 3.
IMS snow maps on (a) 2 January and (b) 4 January 2018, respectively, and (c) NCEP Stage IV Multi-Sensor 24 h precipitation accumulation ending 5 January 2018 12 Zulu time.
Figure 3.
IMS snow maps on (a) 2 January and (b) 4 January 2018, respectively, and (c) NCEP Stage IV Multi-Sensor 24 h precipitation accumulation ending 5 January 2018 12 Zulu time.
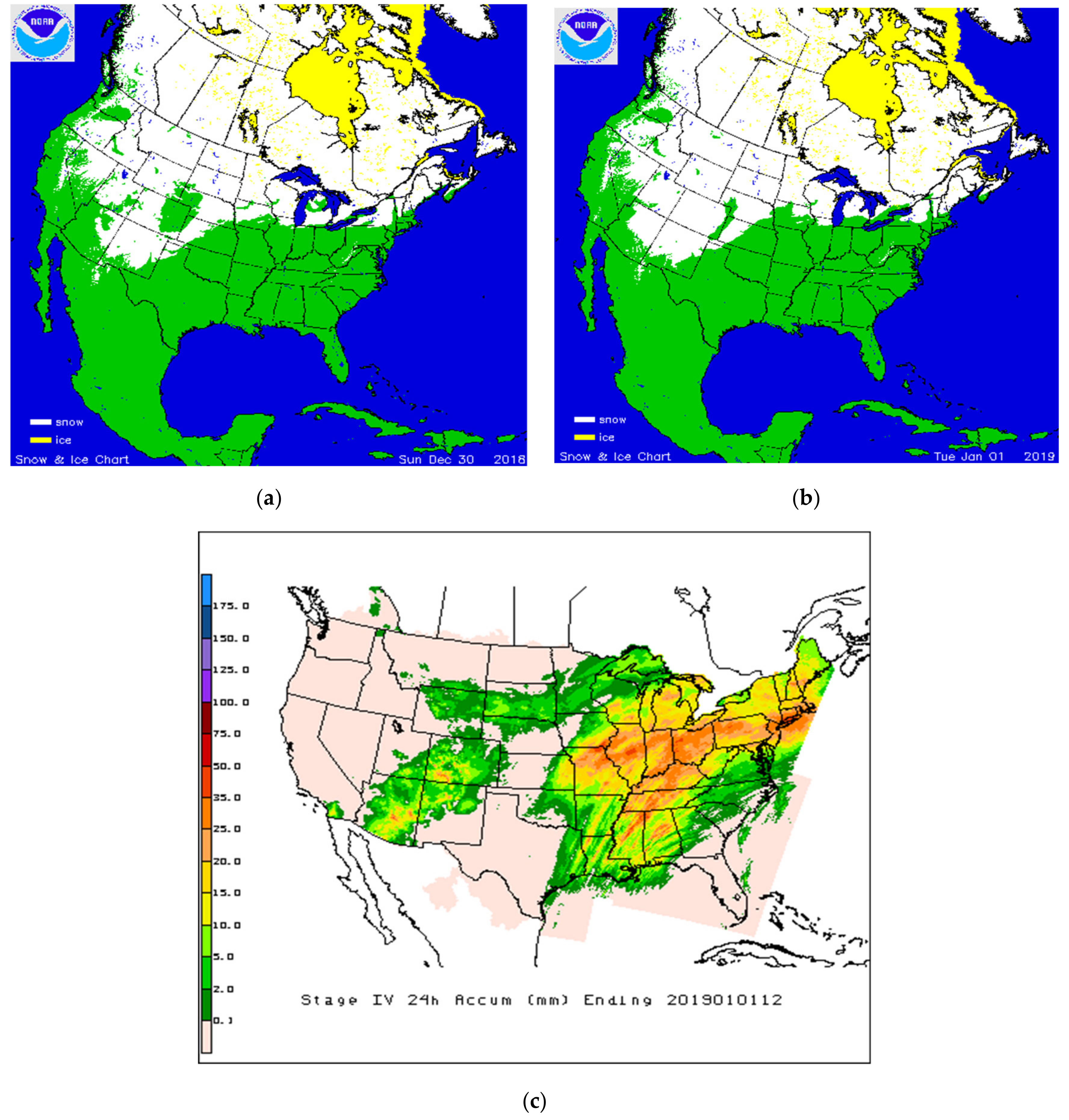
Figure 4.
IMS snow maps on (a) 30 December 2018 and (b) 1 January 2019, respectively, and (c) NCEP Stage IV Multi-Sensor 24 h precipitation accumulation ending 1 January 2019 12 Zulu time.
Figure 4.
IMS snow maps on (a) 30 December 2018 and (b) 1 January 2019, respectively, and (c) NCEP Stage IV Multi-Sensor 24 h precipitation accumulation ending 1 January 2019 12 Zulu time.
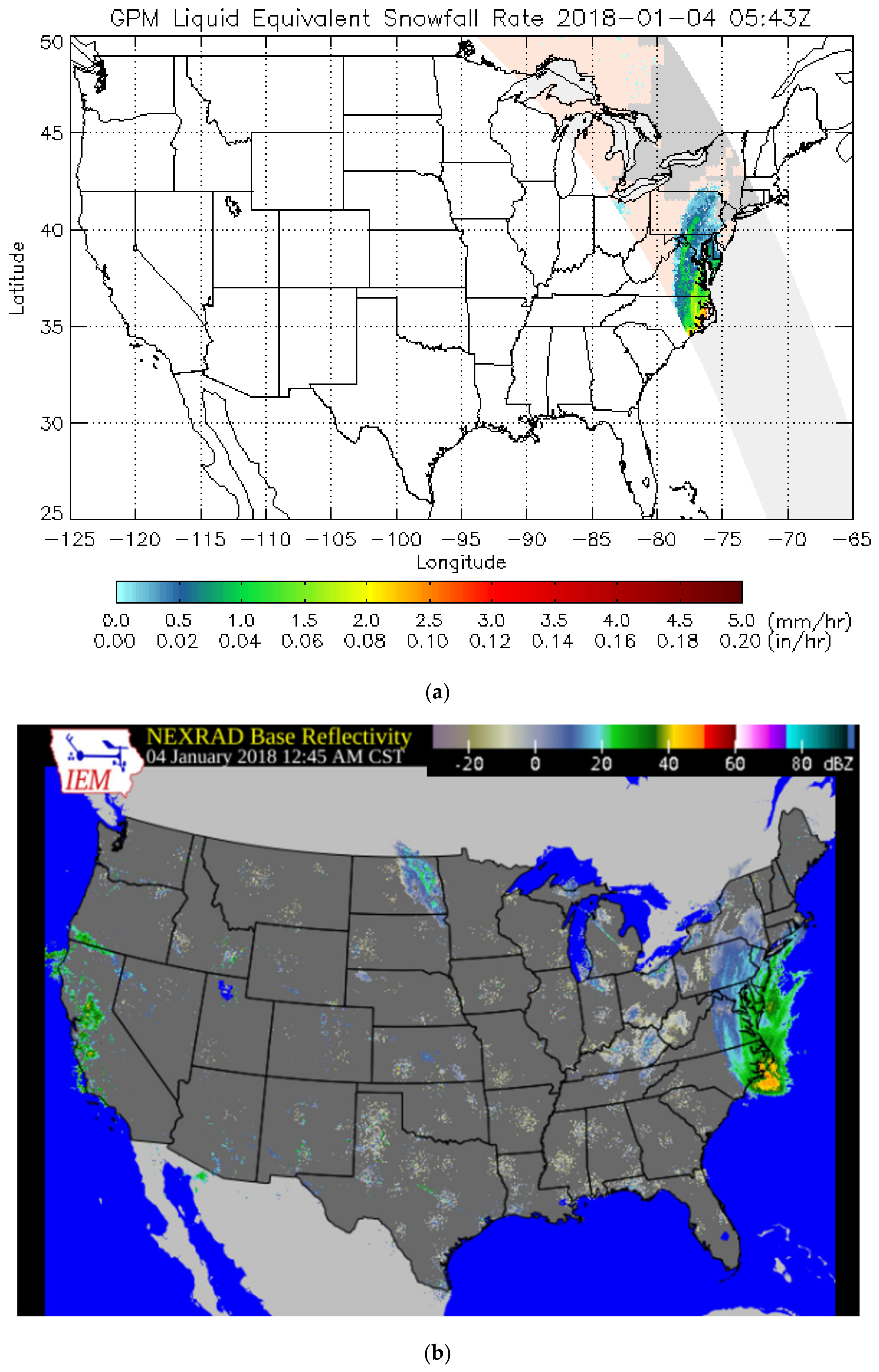
Figure 5.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 on 4 January 2018 5:43 Zulu time and (b) near coincident NEXRAD base reflectivity in dbZ.
Figure 5.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 on 4 January 2018 5:43 Zulu time and (b) near coincident NEXRAD base reflectivity in dbZ.
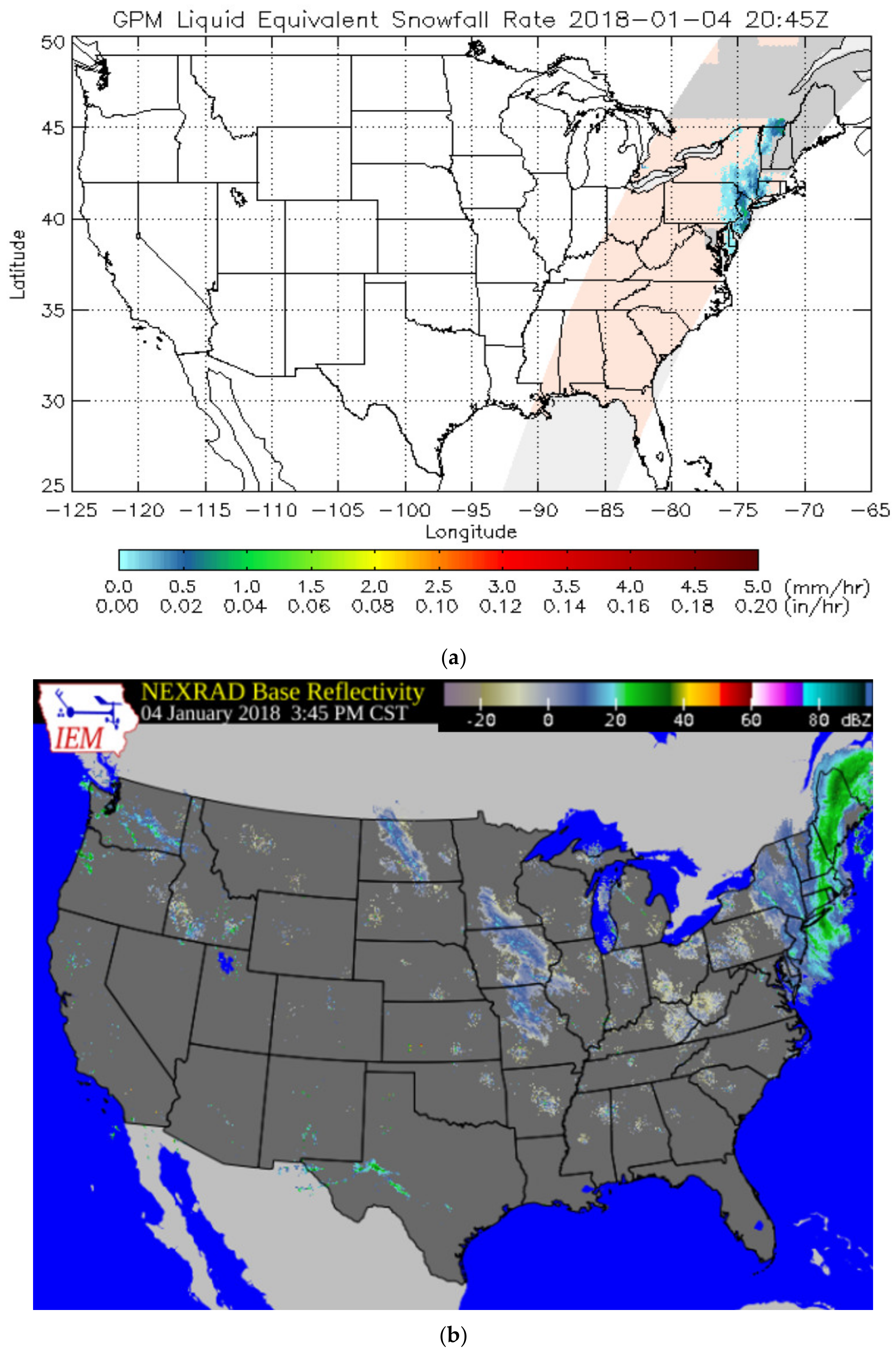
Figure 6.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 (top) on 4 January 2018 20:45 Zulu time and (b) neat coincident NEXRAD base reflectivity in dbZ.
Figure 6.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 (top) on 4 January 2018 20:45 Zulu time and (b) neat coincident NEXRAD base reflectivity in dbZ.
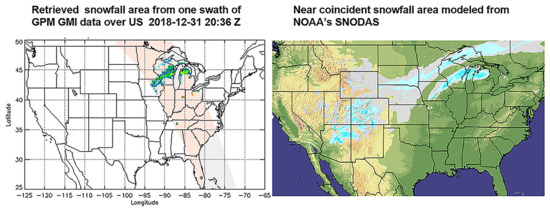
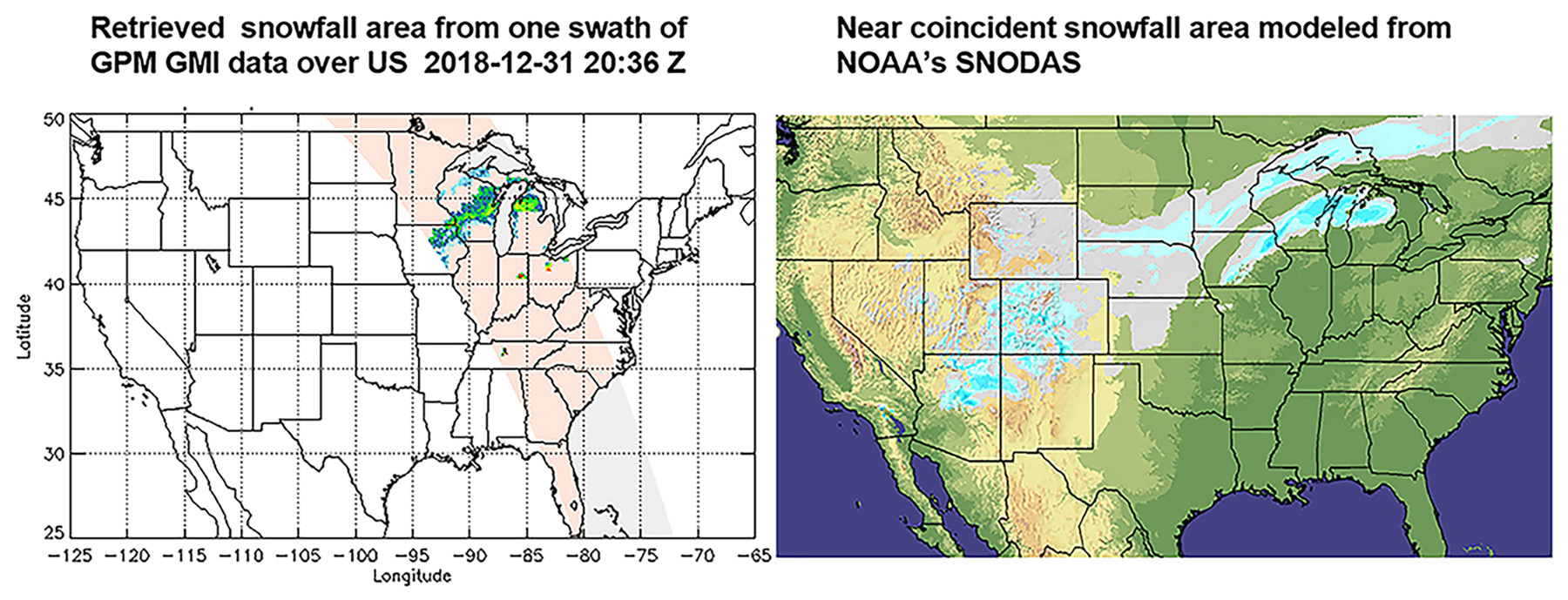
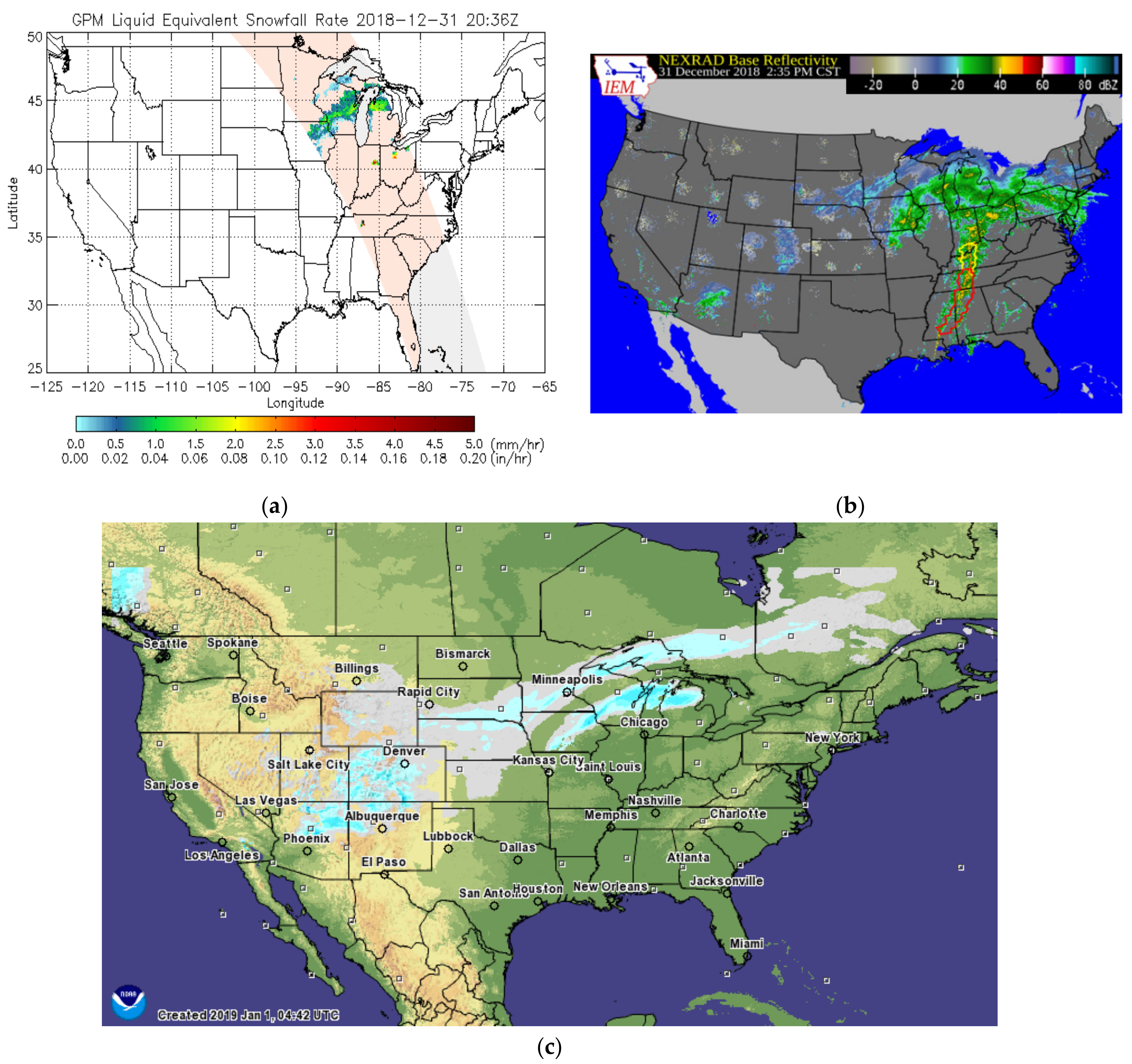
Figure 7.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 on 31 December 2018 20:36 Zulu time, (b) near coincident NEXRAD base reflectivity in dbZ, and (c) near coincident hourly snowfall accumulation from NOAA SNODAS.
Figure 7.
(a) Retrieved GMI-based Liquid Water Snowfall Rate in mm hr−1 on 31 December 2018 20:36 Zulu time, (b) near coincident NEXRAD base reflectivity in dbZ, and (c) near coincident hourly snowfall accumulation from NOAA SNODAS.
Table 1.
Partial correlation coefficients over land among GMI brightness temperature measurements and station measured snowfall rate (SFR). For the variable names, “TB” denotes the brightness temperature, “H” and “V” denote vertical and horizontal polarizations, and the numbers denote the channel center frequency. “diff” refers to the vertical and horizontal brightness temperature difference at a specific frequency. Control variables are the measured surface temperature and relative humidity.
Table 1.
Partial correlation coefficients over land among GMI brightness temperature measurements and station measured snowfall rate (SFR). For the variable names, “TB” denotes the brightness temperature, “H” and “V” denote vertical and horizontal polarizations, and the numbers denote the channel center frequency. “diff” refers to the vertical and horizontal brightness temperature difference at a specific frequency. Control variables are the measured surface temperature and relative humidity.
| | diffTB166 | TB166V | TB166H | TB180V * | TB176V ** | SFR | TB89V | TB89H | difTB89 |
|---|
| diffTB166 | 1.00 | −0.69 | −0.79 | −0.40 | −0.69 | 0.24 | −0.36 | −0.47 | 0.59 |
| TB166V | −0.69 | 1.00 | 0.99 | 0.43 | 0.84 | −0.18 | 0.75 | 0.77 | −0.36 |
| TB166H | −0.79 | 0.99 | 1.00 | 0.45 | 0.86 | −0.21 | 0.71 | 0.75 | −0.43 |
| TB180V* | −0.40 | 0.43 | 0.45 | 1.00 | 0.73 | −0.17 | 0.20 | 0.20 | −0.08 |
| TB176V** | −0.69 | 0.84 | 0.86 | 0.73 | 1.00 | −0.22 | 0.45 | 0.46 | −0.24 |
| SFR | 0.24 | −0.18 | −0.21 | −0.17 | −0.22 | 1.00 | −0.06 | −0.07 | 0.07 |
| TB89V | −0.36 | 0.75 | 0.71 | 0.20 | 0.45 | −0.06 | 1.00 | 0.97 | −0.27 |
| TB89H | −0.47 | 0.77 | 0.75 | 0.20 | 0.46 | −0.07 | 0.97 | 1.00 | −0.49 |
| difTB89 | 0.59 | −0.36 | −0.43 | −0.08 | −0.24 | 0.07 | −0.27 | −0.49 | 1.00 |
Table 2.
Logistic regression model coefficients and statistics for the vertical and horizontal polarization brightness temperature difference at GMI 166 GHz (DiffTB166) and 89 GHz (DiffTB89) as predictors. “B” indicates the partial regression coefficient, “SE” indicates the standard error and “Wald” indicates the observed Wald test statistic.
Table 2.
Logistic regression model coefficients and statistics for the vertical and horizontal polarization brightness temperature difference at GMI 166 GHz (DiffTB166) and 89 GHz (DiffTB89) as predictors. “B” indicates the partial regression coefficient, “SE” indicates the standard error and “Wald” indicates the observed Wald test statistic.
| Predictors | B | SE | Wald | p-Value |
|---|
| DiffTB166 |
0.393
|
0.012 |
1145.124
|
<0.01
|
| DiffTB89 |
−0.264
|
0.011
|
536.571
|
<0.01
|
| Intercept |
−0.406
|
0.042
|
91.708
|
<0.01
|
Table 3.
Forward stepwise logistic regression model performances for diffTB166 (step 1) and diddTB166 and diffTB89 (step 2) as predictors. Each step shows results from the logistic regression model with a new additional predictor variable. “df” indicates the degrees of freedom, “Chi-square” represents the observed Chi-square test statistic value, and “Correct Class” represents the correct overall classification rate.
Table 3.
Forward stepwise logistic regression model performances for diffTB166 (step 1) and diddTB166 and diffTB89 (step 2) as predictors. Each step shows results from the logistic regression model with a new additional predictor variable. “df” indicates the degrees of freedom, “Chi-square” represents the observed Chi-square test statistic value, and “Correct Class” represents the correct overall classification rate.
| Step | Improvement | Model | Correct Class % | Variable |
|---|
| Chi-Square | df | p-Value. | Chi-Square | df | p-Value. |
|---|
| 1 | 912.81 | 1 | <0.01 | 912.81 | 1 | <0.01 | 66.50% | IN: diffTB166 |
| 2 | 636.473 | 1 | <0.01 | 1549.283 | 2 | <0.01 | 68.90% | IN: difTB89 |
Table 4.
Logistic regression model coefficients and statistics for single channel brightness temperature measurements, vertical and horizontal polarization, at 166 GHz (TB166 V and TB166H) and 89 GHz (TB89V and TB89H) as predictors. “B” indicates the partial regression coefficients, “SE” indicates the standard error, and “Wald” indicates the observed Wald test statistic.
Table 4.
Logistic regression model coefficients and statistics for single channel brightness temperature measurements, vertical and horizontal polarization, at 166 GHz (TB166 V and TB166H) and 89 GHz (TB89V and TB89H) as predictors. “B” indicates the partial regression coefficients, “SE” indicates the standard error, and “Wald” indicates the observed Wald test statistic.
| Predictors | B | SE | Wald | p-Value |
|---|
| TB166V | 0.331 | 0.017 | 398.942 | 0.00 |
| TB166H | −0.357 | 0.014 | 644.903 | 0.00 |
| TB89V | −0.23 | 0.012 | 347.841 | 0.00 |
| TB89H | 0.252 | 0.012 | 468.638 | 0.00 |
| Intercept | 0.887 | 0.618 | 2.059 | 0.00 |
Table 5.
Forward stepwise logistic regression model significance test results and performances for single channel brightness temperature measurements, vertical and horizontal polarization, at 166 GHz (TB166 V and TB166H) and 89 GHz (TB89V and TB89H) as predictors. Each step shows results from the logistic regression model with a new additional predictor variable. “df” indicates the degrees of freedom, “Chi-square” represents the observed Chi-square test statistic value, and “Correct Class” represents the correct overall classification rate.
Table 5.
Forward stepwise logistic regression model significance test results and performances for single channel brightness temperature measurements, vertical and horizontal polarization, at 166 GHz (TB166 V and TB166H) and 89 GHz (TB89V and TB89H) as predictors. Each step shows results from the logistic regression model with a new additional predictor variable. “df” indicates the degrees of freedom, “Chi-square” represents the observed Chi-square test statistic value, and “Correct Class” represents the correct overall classification rate.
| Step | Improvement | Model | Correct Class % | Variable |
|---|
| Chi-Square | df | p-Value | Chi-Square | df | p-Value |
|---|
| 1 | 492.387 | 1 | <0.01 | 492.387 | 1 | <0.01 | 61.50% | IN: TB166H |
| 2 | 585.218 | 1 | <0.01 | 1077.605 | 2 | <0.01 | 64.10% | IN: TB89H |
| 3 | 139.115 | 1 | <0.01 | 1216.721 | 3 | <0.01 | 66.70% | IN: TB166V |
| 4 | 387.087 | 1 | <0.01 | 1603.807 | 4 | <0.01 | 68.50% | IN: TB89V |
Table 6.
Final logistic regression model results after the stepwise selection was applied to all high frequency channel TBs at 89 GHz and above and the vertical and horizontal brightness temperature polarization difference at 89 (diffTB89) and 166 (diffTB166) GHz. “B” indicates the partial regression coefficients, “SE” indicates the standard error and “Wald” indicates the observed Wald test statistic.
Table 6.
Final logistic regression model results after the stepwise selection was applied to all high frequency channel TBs at 89 GHz and above and the vertical and horizontal brightness temperature polarization difference at 89 (diffTB89) and 166 (diffTB166) GHz. “B” indicates the partial regression coefficients, “SE” indicates the standard error and “Wald” indicates the observed Wald test statistic.
| Predictors | B | SE | Wald | p-Value |
|---|
| TB180V | −0.15 | 0.01 | 242.333 | <0.01 |
| TB176V | −0.105 | 0.012 | 72.709 | <0.01 |
| DiffTB166 | 0.308 | 0.015 | 394.763 | <0.01 |
| TB166H | 0.057 | 0.005 | 128.317 | <0.01 |
| diffTB89 | −0.144 | 0.012 | 134.749 | <0.01 |
| Intercept | 49.56 | 1.858 | 711.76 | <0.01 |
Table 7.
Forward stepwise logistic regression model performances for the final model. Each step shows results from the logistic regression model with a new additional predictor variable.
Table 7.
Forward stepwise logistic regression model performances for the final model. Each step shows results from the logistic regression model with a new additional predictor variable.
| Step | Improvement | Model | Correct Class % | Variable |
|---|
| Chi-Square | df | Sig. | Chi-Square | df | Sig. |
|---|
| 1 | 2038.087 | 1 | 0 | 2038.087 | 1 | 0 | 69.40% | IN: TB180V |
| 2 | 138.929 | 1 | 0 | 2177.016 | 2 | 0 | 70.50% | IN: diffTB166 |
| 3 | 294.03 | 1 | 0 | 2471.046 | 3 | 0 | 71.80% | IN: difTB89 |
| 4 | 92.522 | 1 | 0 | 2563.568 | 4 | 0 | 72.00% | IN: TB89H |
| 5 | 11.814 | 1 | 0.001 | 2575.381 | 5 | 0 | 72.00% | IN: TB176V |
| 6 | 39.319 | 1 | 0 | 2614.701 | 6 | 0 | 72.60% | IN: TB166H |
| 7 | −0.385 | 1 | 0.535 | 2614.315 | 5 | 0 | 72.60% | OUT: TB89H |
Table 8.
Performance statistics of the final logistic regression model. POD indicates the probability of snowfall detection, FAR indicates the probability of false alarm, and HSS indicates the Heidke Skill Score.
Table 8.
Performance statistics of the final logistic regression model. POD indicates the probability of snowfall detection, FAR indicates the probability of false alarm, and HSS indicates the Heidke Skill Score.
| POD | FAR | Overall | HSS |
|---|
| 57.3 | 13.0 | 72.6 | 0.48 |










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}