Advances in Remote Sensing Technology, Machine Learning and Deep Learning for Marine Oil Spill Detection, Prediction and Vulnerability Assessment


Abstract
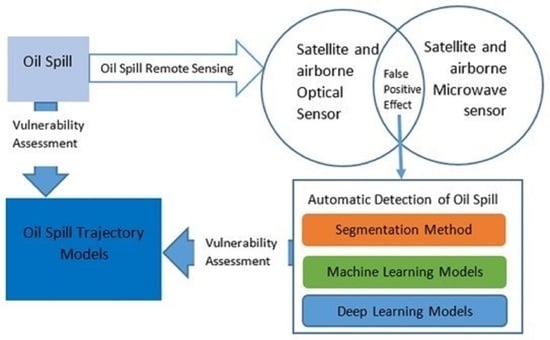
1. Introduction
2. Remote Sensing in Oil Spill Management
2.1. Optical Remote Sensing
2.1.1. Optical Airborne Remote Sensing
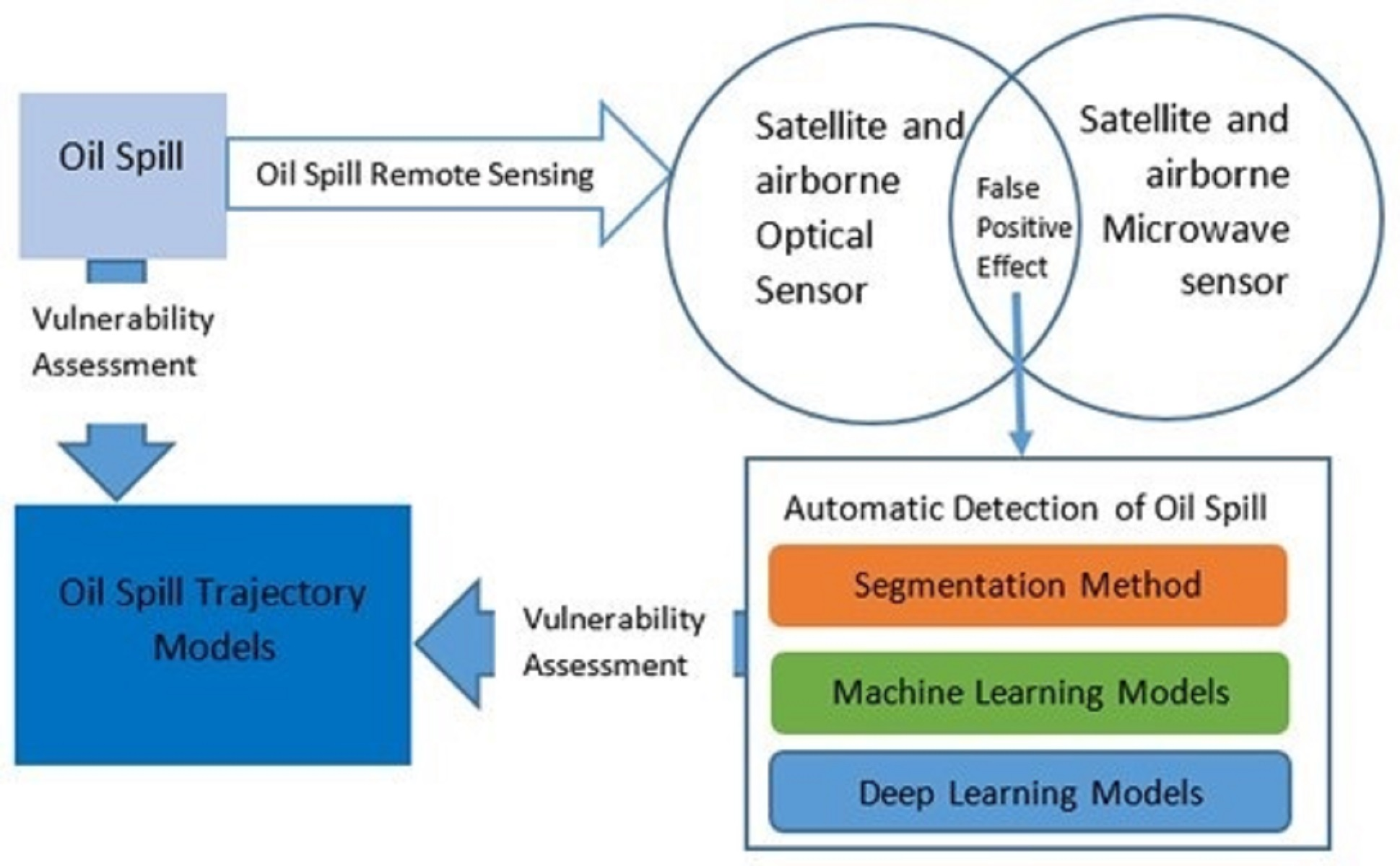
Visible Spectrum Optical Remote Sensing
Infrared (IR) Remote Sensing
Near-Infrared (NIR) Remote Sensing
Ultraviolet (UV) Sensor
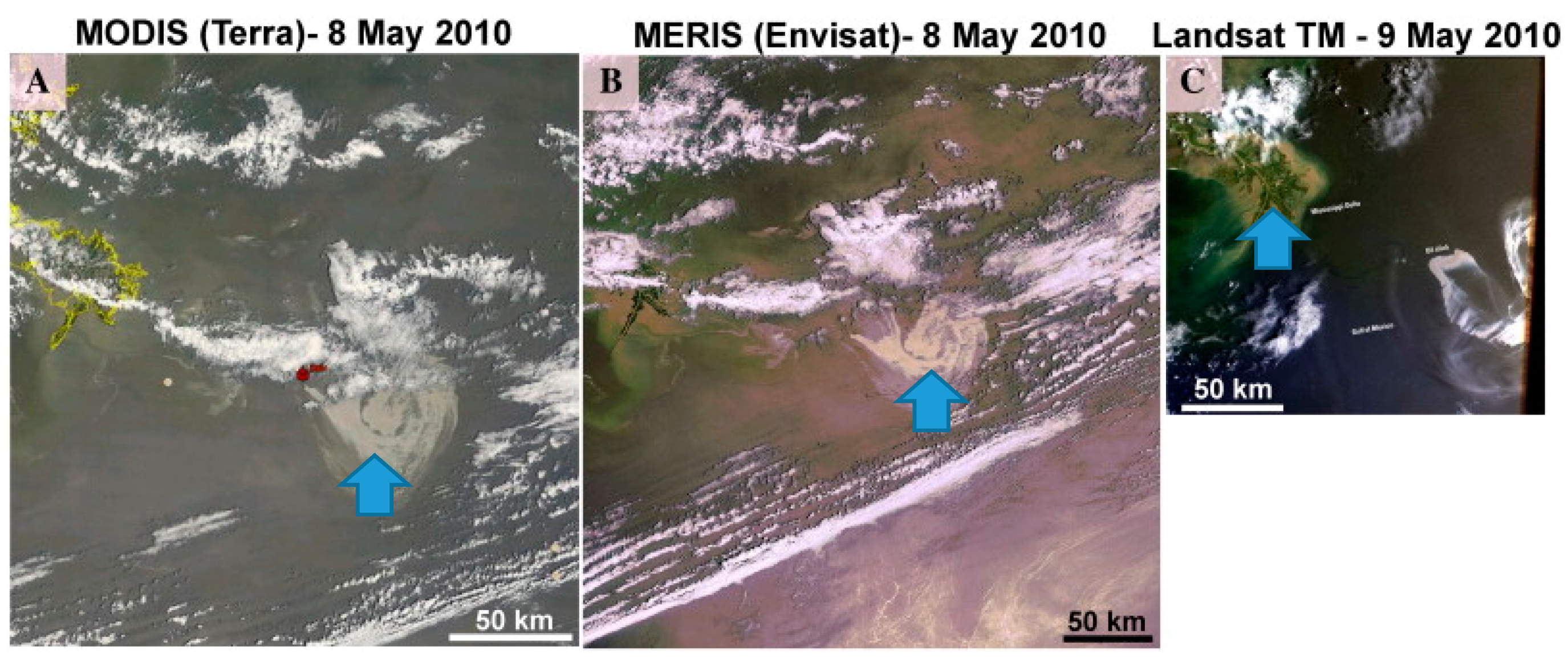
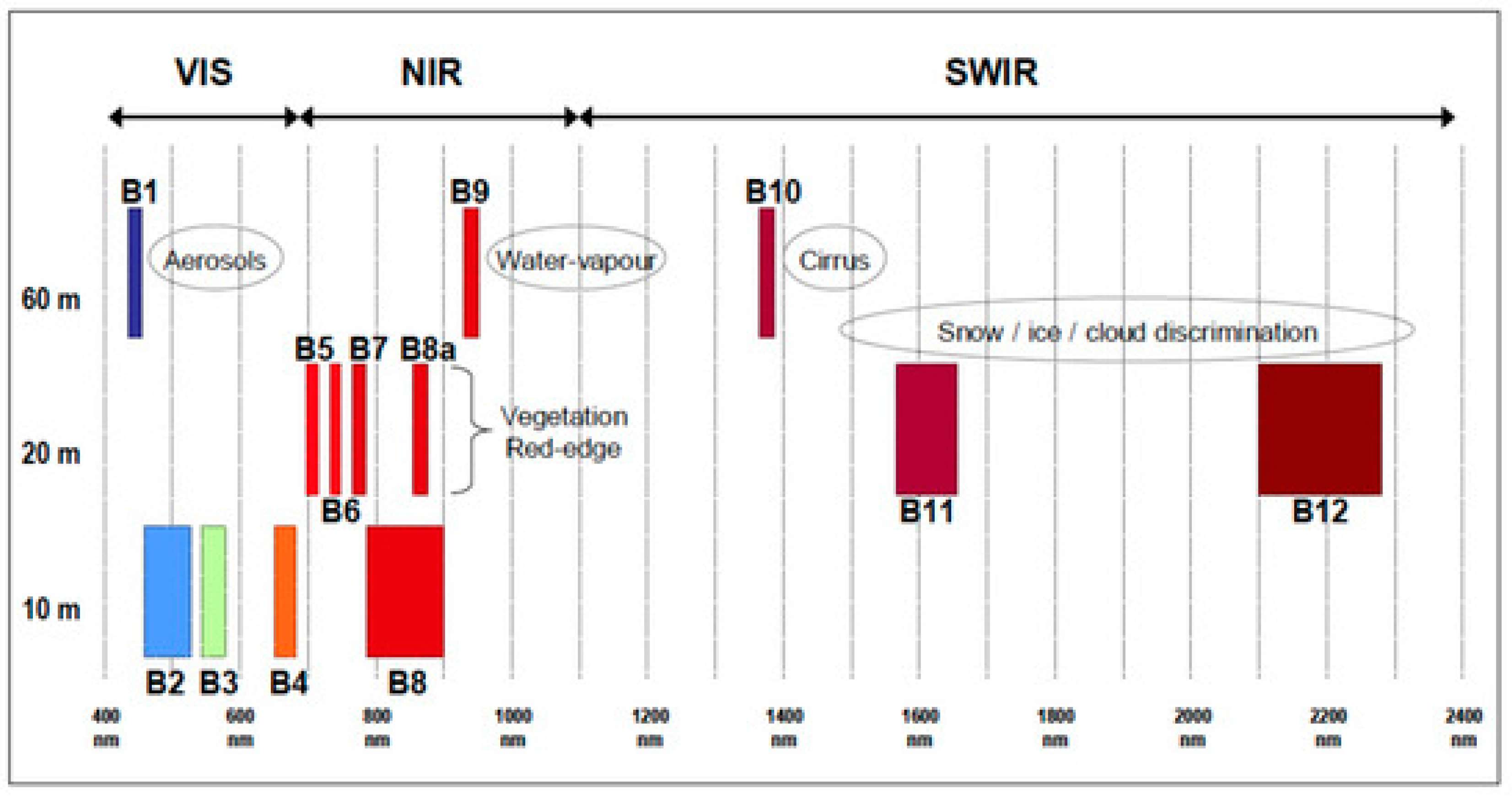
2.1.2. Optical Satellite Remote Sensing
2.2. Microwave Airborne and Satellite Remote Sensing
3. Automatic Detection Techniques for Distinguishing Oil Spills from Lookalikes
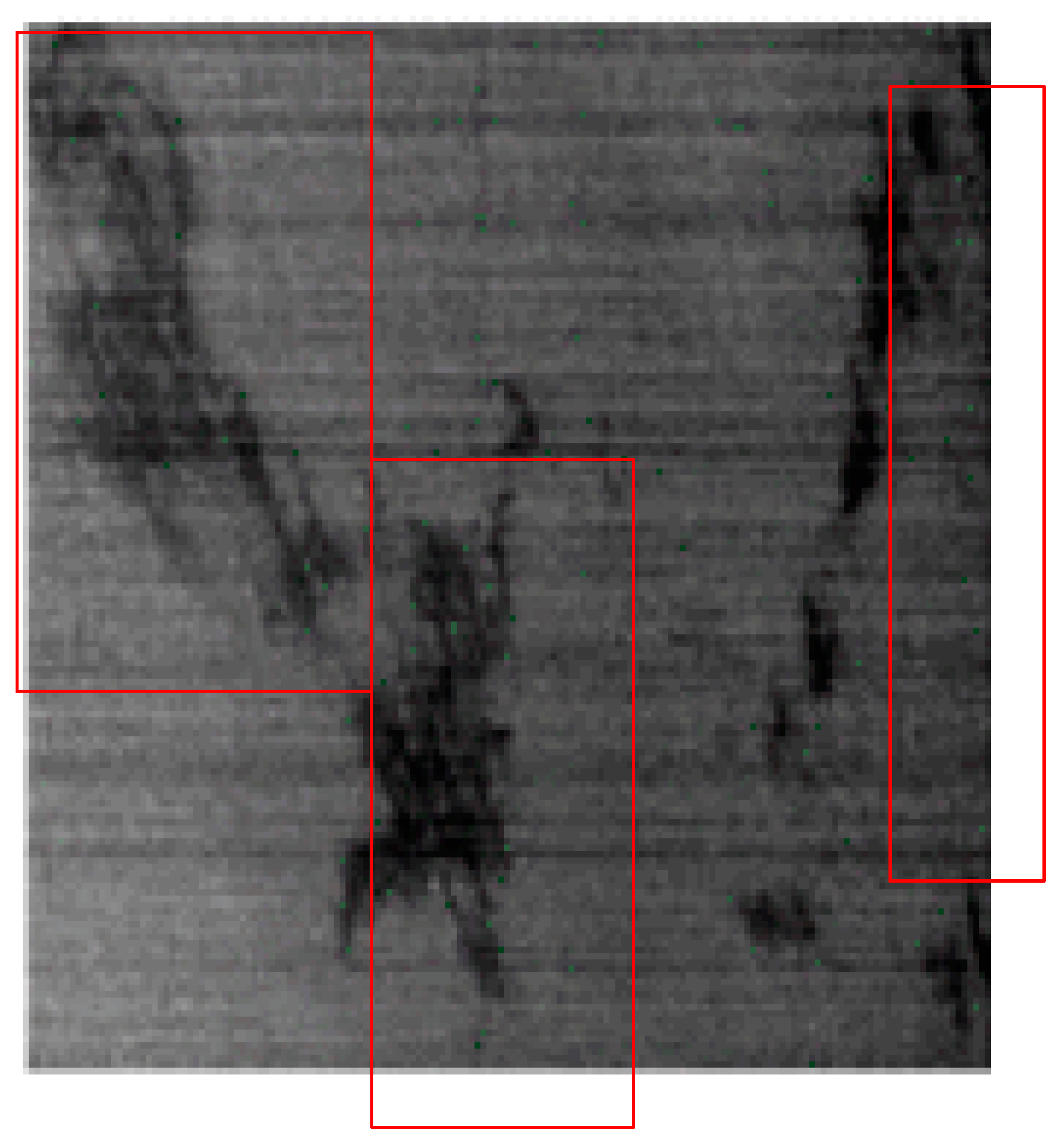
3.1. Image Segmentation Technique
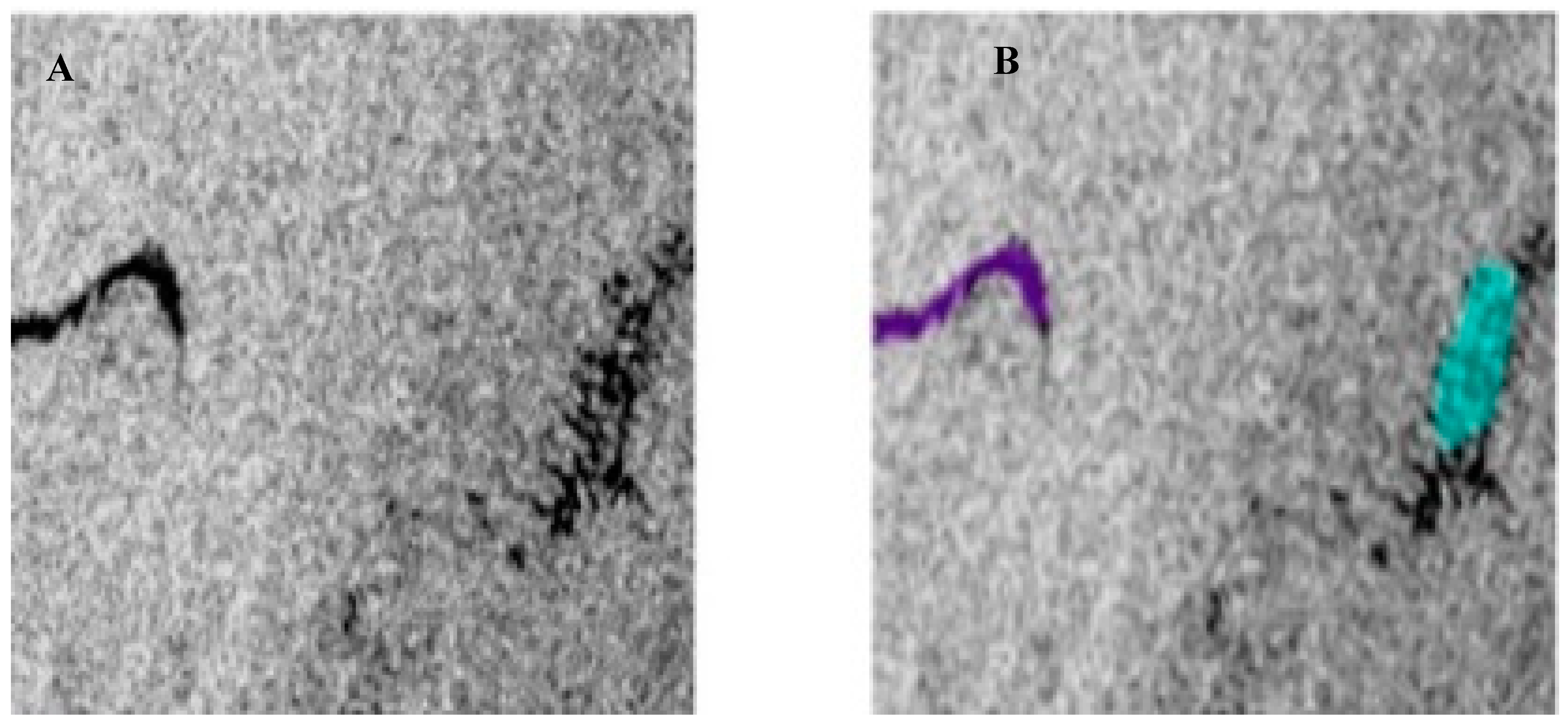
3.1.1. Dark Spot Detection
3.1.2. Dark Spot Feature Extraction
3.2. Machine Learning for Oil Spill Detection
3.2.1. Support Vector Machine (SVM)
3.2.2. Decision Tree (DT)
3.2.3. Random Forest (RF)
3.2.4. Artificial Neural Network (ANN)
3.3. Deep Learning
4. Oil Spill Trajectory Modeling for Vulnerability Assessment
5. Discussion
5.1. Remote Sensing for Oil Spill Detection
5.2. Automatic Oil Spill Detection
5.3. Oil Spill Trajectory Modeling for Vulnerability Assessment
6. Lessons Learned
6.1. Remote Sensing
- (1)
- Remote sensing for oil spill monitoring and management can be divided into two broad categories (optical (active) and microwave (passive) sensors), which can be further classified into four subcategories: (optical and passive airborne; optical and passive satellites).
- (2)
- Appearance and thickness of oil spills in optical airborne remote sensing vary across sensors. For example, in the visible sensors, the presence of oil spill indicates high surface reflectance difference. In addition, absence of absorption in the visible region indicates the presence of oil on water with reflectance ranging 480–570 nm.
- (3)
- The appearance of oil in IN passive airborne sensor is based on the difference in oil and water that makes a distinct thermal infrared region due to the lower emissivity from oil than water.
- (4)
- The appearance of oil in a NIR is based on the fundamental C-H stretching and bending vibration bands while UV depends on the sun’s reflection value to indicate the presence of oil slick.
- (5)
- Improvements in the visible sensor hyperspectral remote sensing led to the emergence of AVIRIS and AISA, which have high signal to noise ratio and good spectral resolution.
- (6)
- The quantity of oil slick in water can be best measured with airborne NIR.
- (7)
- Passive satellite sensors for oil spill monitoring are mostly affected by cloud cover, bad weather, absence of sunlight, and limited ability to differentiate between lookalikes and oil slick.
- (8)
- Presently, active sensors are the most widely used remote sensing technology for oil spill detection due to its ability to operate under any weather condition. They detect oil spills from wind speeds within 2–10 ms−1. However, false positive appearance of lookalikes affects the reliability of these sensors.
- (9)
- To date, there is no single best remote sensing technique that can unambiguously and reliably detect oil spills without lookalikes.
- (10)
- Developing remote sensing technology that can detect oil spills without the appearance of lookalikes is a vital field of research that is worth exploring.
6.2. Automatic Oil Spill Detection
- (1)
- The deficiency of remote sensing technology in distinguishing oil slick from lookalikes necessitated the development of automatic detection models.
- (2)
- Image segmentation algorithms based on thresholding and machine learning/deep learning models are the major approaches for automatic detection of marine oil spills.
- (3)
- SVM and ANN machine learning models have been mostly applied for the classification of marine oil spill and lookalike.
- (4)
- The limitation of machine learning models to feed forward image classification with no support for the end-to-end trainable framework affects its accuracy.
- (5)
- Deep learning models’ strong feature extraction and autonomous learning capability enhance their performance and facilitates high accuracy in marine oil spill detection.
- (6)
- The application of instance segmentation models for rapid detection, recognition, and segmentation of oil spills from lookalikes are still limited.
- (7)
- The inclusion of other elements in the sea enhances model detection accuracy
- (8)
- The absence of verified database of oil spill images affects automated detection accuracy since present modeling approaches depend on either data augmentation or transfer learning on existing models to enhance the accuracy.
6.3. Oil Spill Trajectory Modeling for Vulnerability Assessment
- (1)
- The need for accurate and timely mapping of vulnerable locations inspired the development of different oil spill trajectory models.
- (2)
- Oil spill trajectory models use Lagrangian particles to indicate oil spill in water surfaces and sub-surfaces.
- (3)
- The available oil spill trajectory models comprise a series of algorithms which make it impossible for individual fate of Lagrangian particles to be processed independently.
- (4)
- Existing models do not support the quantification of uncertainty in the vulnerability prediction
- (5)
- Some of the existing models are limited in their integration with GIS, which hinders visualization of oil spill movement.
7. Conclusions and Future Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, J.; Zhang, W.; Wan, Z.; Li, S.; Huang, T.; Fei, Y. Oil spills from global tankers: Status review and future governance. J. Clean. Prod. 2019, 227, 20–32. [Google Scholar] [CrossRef]
- Yekeen, S.; Balogun, A.; Aina, Y. Early Warning Systems and Geospatial Tools: Managing Disasters for Urban Sustainability. In Sustainable Cities and Communities; Leal Filho, W., Azul, A.M., Brandli, L., Özuyar, P.G., Wall, T., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 1–13. [Google Scholar]
- Michel, J.; Fingas, M. Oil spills: Causes, consequences, prevention, and countermeasures. In Fossil Fuels; Research Planning, Inc.: Columbia, SC, USA, 2015. [Google Scholar]
- Pelta, R.; Carmon, N.; Ben-Dor, E. A machine learning approach to detect crude oil contamination in a real scenario using hyperspectral remote sensing. Int. J. Appl. Earth Obs. Geoinformation 2019, 82, 101901. [Google Scholar] [CrossRef]
- Jiao, Z.; Jia, G.; Cai, Y. A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles. Comput. Ind. Eng. 2019, 135, 1300–1311. [Google Scholar] [CrossRef]
- Lynch, L.E. Statement by Attorney General Loretta E. Lynch on the Agreement in Principle with BP to Settle Civil Claims for the Deepwater Horizon Oil Spill. 31 March 2015. Available online: https://www.justice.gov/opa/pr/statement-attorney-general-loretta-e-lynch-agreement-principle-bp-settle-civil-claims (accessed on 29 November 2019).
- Bishop, R.C.; Boyle, K.J.; Carson, R.T.; Chapman, D.; Hanemann, W.M.; Kanninen, B.; Kopp, R.J.; Krosnick, J.A.; List, J.; Meade, N. Putting a value on injuries to natural assets: The BP oil spill. J. Sci. 2017, 356, 253–254. [Google Scholar] [CrossRef]
- Smith, L.C.; Smith, M.; Ashcroft, P. Analysis of environmental and economic damages from British Petroleum’s Deepwater Horizon oil spill. Alban. Law Rev. 2011, 4, 563–585. [Google Scholar] [CrossRef][Green Version]
- Murphy, D.; Gemmell, B.; Vaccari, L.; Li, C.; Bacosa, H.P.; Evans, M.; Gemmell, C.; Harvey, T.; Jalali, M.; Niepa, T.H. An in-depth survey of the oil spill literature since 1968: Long term trends and changes since Deepwater Horizon. Mar. Pollut. Bull. 2016, 113, 371–379. [Google Scholar] [CrossRef]
- Cornwall, W. Deepwater Horizon: After the oil. Science 2015, 348, 22–29. [Google Scholar] [CrossRef]
- Nwachukwu, A.N.; Osuagwu, J.C. Effects of Oil Spillage on Groundwater Quality In Nigeria. Am. J. Eng. Res. AJER 2014, 3, 271–274. [Google Scholar]
- Mignucci-Giannoni, A. Assessment and rehabilitation of wildlife affected by an oil spill in Puerto Rico. Environ. Pollut. 1999, 104, 323–333. [Google Scholar] [CrossRef]
- Fingas, M. The Basics of Oil Spill Cleanup; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- National Research Council. Oil in the Sea III: Inputs, Fates, and Effects; National Academies Press (US): Washington, DC, USA, 2003. [Google Scholar]
- Li, P.; Cai, Q.; Lin, W.; Chen, B.; Zhang, B. Offshore oil spill response practices and emerging challenges. Mar. Pollut. Bull. 2016, 110, 6–27. [Google Scholar] [CrossRef]
- Westerholm, D.A.; Rauch, S.D., III; Kennedy, D.M.; Basta, D.J. Deepwater Horizon oil spill: Final programmatic damage assessment and restoration plan and final programmatic environmental impact statement. In Natural Resources Science Plan 2011–2015; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Piatt, J.F.; Lensink, C.J.; Butler, W.; Nysewander, D.R. Immediate Impact of the ‘Exxon Valdez’ Oil Spill on Marine Birds. Auk 1990, 107, 387–397. [Google Scholar] [CrossRef]
- Nevalainen, M.; Helle, I.; Vanhatalo, J.P. Estimating the acute impacts of Arctic marine oil spills using expert elicitation. Mar. Pollut. Bull. 2018, 131, 782–792. [Google Scholar] [CrossRef] [PubMed]
- Prabowo, A.R.; Bae, D.M. Environmental risk of maritime territory subjected to accidental phenomena: Correlation of oil spill and ship grounding in the Exxon Valdez’s case. Results Eng. 2019, 4, 100035. [Google Scholar] [CrossRef]
- Amir-Heidari, P.; Arneborg, L.; Lindgren, J.F.; Lindhe, A.; Rosén, L.; Raie, M.; Axell, L.; Hassellöv, I.-M. A state-of-the-art model for spatial and stochastic oil spill risk assessment: A case study of oil spill from a shipwreck. Environ. Int. 2019, 126, 309–320. [Google Scholar] [CrossRef] [PubMed]
- Grubesic, T.H.; Nelson, J.R.; Wei, R. A strategic planning approach for protecting environmentally sensitive coastlines from oil spills: Allocating response resources on a limited budget. Mar. Policy 2019, 108, 103549. [Google Scholar] [CrossRef]
- Fan, C.; Hsu, C.-J.; Lin, J.-Y.; Kuan, Y.-K.; Yang, C.-C.; Liu, J.-H.; Yeh, J.-H. Taiwan’s legal framework for marine pollution control and responses to marine oil spills and its implementation on T.S. Taipei cargo shipwreck salvage. Mar. Pollut. Bull. 2018, 136, 84–91. [Google Scholar] [CrossRef]
- Bullock, R.J.; Perkins, R.A.; Aggarwal, S. In-situ burning with chemical herders for Arctic oil spill response: Meta-analysis and review. Sci. Total. Environ. 2019, 675, 705–716. [Google Scholar] [CrossRef]
- Sardi, S.S.; Qurban, M.A.; Li, W.; Kadinjappalli, K.P.; Manikandan, K.P.; Hariri, M.M.; Al-Tawabini, B.S.; Khalil, A.B.; El-Askary, H. Assessment of areas environmentally sensitive to oil spills in the western Arabian Gulf, Saudi Arabia, for planning and undertaking an effective response. Mar. Pollut. Bull. 2019, 150, 110588. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. Review of oil spill remote sensing. Mar. Pollut. Bull. 2014, 83, 9–23. [Google Scholar] [CrossRef]
- Ko, T.-J.; Hwang, J.-H.; Davis, D.; Shawkat, M.S.; Han, S.S.; Rodriguez, K.L.; Oh, K.H.; Lee, W.H.; Jung, Y. Superhydrophobic MoS2-based multifunctional sponge for recovery and detection of spilled oil. Curr. Appl. Phys. 2019, 20, 344–351. [Google Scholar] [CrossRef]
- Marghany, M. Chapter 13—Quantum immune fast spectral clustering for automatic detection of oil spill. In Synthetic Aperture Radar Imaging Mechanism for Oil Spills; Marghany, M., Ed.; Gulf Professional Publishing: Houston, TX, USA, 2020; pp. 243–267. [Google Scholar]
- Fan, J.; Zhang, F.; Zhao, D.; Wang, J. Oil Spill Monitoring Based on SAR Remote Sensing Imagery. Aquatic Proced. 2015, 3, 112–118. [Google Scholar] [CrossRef]
- Fustes, D.; Cantorna, D.; Dafonte, C.; Arcay, B.; Iglesias, A.; Manteiga, M. A cloud-integrated web platform for marine monitoring using GIS and remote sensing. Application to oil spill detection through SAR images. Futur. Gener. Comput. Syst. 2014, 34, 155–160. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. Chapter 5—Oil Spill Remote Sensing. In Oil Spill Science and Technology, 2nd ed.; Fingas, M., Ed.; Gulf Professional Publishing: Boston, MA, USA, 2017; pp. 305–385. [Google Scholar]
- Ning, J.L.; Chen, Z.L.; Wang, C.Y.; Xie, W.J. Analysis of Marine Oil Spill Pollution Monitoring Based on Satellite Remote Sensing Technology. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2018; Volume 392, p. 042045. [Google Scholar]
- Schott, J.R. Remote Sensing: The Image Chain Approach; Oxford University Press on Demand: Oxford, UK, 2007. [Google Scholar]
- Campbell, J.B.; Wynne, R.H. Introduction to Remote Sensing; Guilford Press: New York, NY, USA, 2011. [Google Scholar]
- Estes, J.; Senger, L. The multispectral concept as applied to marine oil spills. Remote Sens. Environ. 1971, 2, 141–163. [Google Scholar] [CrossRef]
- Fingas, M. Review of Oil Spill Remote Sensing Technologies; Spill Science: Edmonton, AB, Canada, 2015; p. 9. [Google Scholar]
- Topouzelis, K. Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms. Sensors 2008, 8, 6642–6659. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Gambardella, A. Polarimetric signature for oil spill observation. In Proceedings of the 2008 IEEE/OES US/EU-Baltic International Symposium, Tallinn, Estonia, 27–29 May 2008; pp. 1–5. [Google Scholar]
- Migliaccio, M.; Nunziata, F.; Buono, A. SAR Polarimetry for Effective Sea Oil Slick Observation. In Proceedings of the 2018 IEEE/OES Baltic International Symposium (BALTIC), Klaipeda, Lithuania, 12–15 June 2018; pp. 1–5. [Google Scholar]
- Solberg, A.H.S. Remote sensing of ocean oil-spill pollution. Proc. IEEE 2012, 100, 2931–2945. [Google Scholar] [CrossRef]
- Genovez, P.; Ebecken, N.F.F.; Freitas, C.; Bentz, C.; Freitas, R. Intelligent hybrid system for dark spot detection using SAR data. Expert Syst. Appl. 2017, 81, 384–397. [Google Scholar] [CrossRef]
- Cantorna, D.; Dafonte, C.; Iglesias, A.; Arcay, B. Oil spill segmentation in SAR images using convolutional neural networks. A comparative analysis with clustering and logistic regression algorithms. Appl. Soft Comput. 2019, 84, 105716. [Google Scholar] [CrossRef]
- Alpers, W.; Hühnerfuss, H. Radar signatures of oil films floating on the sea surface and the Marangoni effect. J. Geophys. Res. Space Phys. 1988, 93, 3642–3648. [Google Scholar] [CrossRef]
- PLiu, P.; Zhao, C.; Li, X.; He, M.; Pichel, W.G. Identification of ocean oil spills in SAR imagery based on fuzzy logic algorithm. Int. J.Remote Sens. 2010, 31, 4819–4833. [Google Scholar]
- Krestenitis, M.; Orfanidis, G.; Ioannidis, K.; Avgerinakis, K.; Vrochidis, S.; Kompatsiaris, I. Oil Spill Identification from Satellite Images Using Deep Neural Networks. Remote Sens. 2019, 11, 1762. [Google Scholar]
- Fiscella, B.; Giancaspro, A.; Nirchio, F.; Pavese, P.; Trivero, P. Oil spill detection using marine SAR images. Int. J. Remote Sens. 2000, 21, 3561–3566. [Google Scholar]
- Guo, Y.; Zhang, H.Z. Oil spill detection using synthetic aperture radar images and feature selection in shape space. Int. J. Appl. Earth Obs. Geoinformation 2014, 30, 146–157. [Google Scholar]
- Frate, F.D.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2282–2287. [Google Scholar]
- Ping, W.; Guoqing, Y.; Yi, D.; Ying, L.; Wenjing, Y.; Yaoxin, S. Marine oil spill detection method research based on Envisat ASAR images. In Proceedings of the IET International Conference on Information Science and Control Engineering 2012 (ICISCE 2012), Shenzhen, China, 7–9 December 2012; pp. 1–4. [Google Scholar]
- Qiao, F.; Wang, G.; Yin, L.; Zeng, K.; Zhang, Y.; Zhang, M.; Xiao, B.; Jiang, S.; Chen, H.; Chen, G. Modelling oil trajectories and potentially contaminated areas from the Sanchi oil spill. Sci. Total Environ. 2019, 685, 856–866. [Google Scholar]
- Nordam, T.; Beegle-Krause, C.; Skancke, J.; Nepstad, R.; Reed, M. Improving oil spill trajectory modelling in the Arctic. Mar. Pollut. Bull. 2019, 140, 65–74. [Google Scholar] [PubMed]
- Bozkurtoğlu, Ş.N.E. Modeling oil spill trajectory in Bosphorus for contingency planning. Mar. Pollut. Bull. 2017, 123, 57–72. [Google Scholar]
- Abascal, A.J.; Sanchez, J.; Chiri, H.; Ferrer, M.I.; Cárdenas, M.; Gallego, A.; Castanedo, S.; Medina, R.; Alonso-Martirena, A.; Berx, B.; et al. Operational oil spill trajectory modelling using HF radar currents: A northwest European continental shelf case study. Mar. Pollut. Bull. 2017, 119, 336–350. [Google Scholar] [PubMed]
- Goodman, R. Overview and future trends in oil spill remote sensing. Spill Sci. Technol. Bull. 1994, 1, 11–21. [Google Scholar]
- Fingas, M. Oil Spill Science and Technology; Gulf Professional Publishing: Houston, TX, USA, 2016. [Google Scholar]
- Bulgarelli, B.; Djavidnia, S. On MODIS Retrieval of Oil Spill Spectral Properties in the Marine Environment. IEEE Geosci. Remote Sens. Lett. 2012, 9, 398–402. [Google Scholar]
- Andreou, C.; Karathanassi, V. Endmember detection in marine environment with oil spill event. In Proceedings of the Image and Signal Processing for Remote Sensing XVII, Prague, Czech Republic, 26 October 2011; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 8180, p. 81800P. [Google Scholar]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in Remote Sensing for Oil Spill Disaster Management: State-of-the-Art Sensors Technology for Oil Spill Surveillance. Sensors 2008, 8, 236–255. [Google Scholar] [CrossRef] [PubMed]
- Trieschmann, O.; Hunsaenger, T.; Tufte, L.; Barjenbruch, U. Data assimilation of an airborne multiple-remote-sensor system and of satellite images for the North Sea and Baltic Sea. Remote Sensing Ocean Sea Ice 2003, 5233, 51–61. [Google Scholar]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.E.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ. 2012, 124, 185–209. [Google Scholar] [CrossRef]
- Garcia-Pineda, O.; Staples, G.; Jones, C.E.; Hu, C.; Holt, B.; Kourafalou, V.; Graettinger, G.; Dipinto, L.; Ramirez, E.; Streett, D.; et al. Classification of oil spill by thicknesses using multiple remote sensors. Remote Sens. Environ. 2020, 236, 111421. [Google Scholar] [CrossRef]
- Zhong, Z.; You, F. Oil spill response planning with consideration of physicochemical evolution of the oil slick: A multiobjective optimization approach. Comput. Chem. Eng. 2011, 35, 1614–1630. (In English) [Google Scholar] [CrossRef]
- Lu, Y.; Li, X.; Tian, Q.; Zheng, G.; Sun, S.; Liu, Y.; Yang, Q. Progress in Marine Oil Spill Optical Remote Sensing: Detected Targets, Spectral Response Characteristics, and Theories. Mar. Geodesy 2013, 36, 334–346. [Google Scholar] [CrossRef]
- Shi, L.; Ivanov, A.Y.; He, M.; Zhao, C. Oil spill mapping in the western part of the East China Sea using synthetic aperture radar imagery. Int. J. Remote Sens. 2008, 29, 6315–6329. [Google Scholar] [CrossRef]
- Yin, Q.-Z.; Li, K.; Zhou, C.; Liu, C.; Chu, X.-M.; Zheng, J.; Yin, Q.-Z. Research on Oil Spill Monitoring Experiments Based on OFD-1 Oil Film Detector. In Proceedings of the 2012 2nd International Conference on Remote Sensing, Environment and Transportation Engineering; Institute of Electrical and Electronics Engineers (IEEE), Nanjing, China, 1–3 June 2012; pp. 1–4. [Google Scholar]
- Lu, Y.; Chen, J.; Bao, Y.; Han, W.; Li, X.; Tian, Q.; Zhang, X. Using HJ-1 satellite CCD data for remote sensing analysis and information extraction in oil spill scenarios. J. Sci. Sin. Inf. 2011, 41, 193–201. [Google Scholar]
- Wismann, V.; Gade, M.; Alpers, W.; Huhnerfuss, H. Radar signatures of marine mineral oil spills measured by an airborne multi-frequency radar. Int. J. Remote Sens. 1998, 19, 3607–3623. [Google Scholar] [CrossRef]
- Wang, D.; Gong, F.; Pan, D.; Hao, Z.; Zhu, Q. Introduction to the airborne marine surveillance platform and its application to water quality monitoring in China. Acta Oceanol. Sin. 2010, 29, 33–39. [Google Scholar] [CrossRef]
- Svejkovský, J.; Hess, M.; Muskat, J.; Nedwed, T.J.; McCall, J.; Garcia, O. Characterization of surface oil thickness distribution patterns observed during the Deepwater Horizon (MC-252) oil spill with aerial and satellite remote sensing. Mar. Pollut. Bull. 2016, 110, 162–176. [Google Scholar] [CrossRef]
- Boochs, F.; Kupfer, G.; Dockter, K.; Kühbauch, W. Shape of the red edge as vitality indicator for plants. Int. J. Remote Sens. 1990, 11, 1741–1753. [Google Scholar] [CrossRef]
- Lu, Y.; Sun, S.; Zhang, M.; Murch, B.; Hu, C. Refinement of the critical angle calculation for the contrast reversal of oil slicks under sunglint. J. Geophys. Res. Oceans 2016, 121, 148–161. [Google Scholar] [CrossRef]
- Sun, S.; Hu, C.; Feng, L.; Swayze, G.A.; Holmes, J.; Graettinger, G.; Macdonald, I.; Garcia, O.; Leifer, I. Oil slick morphology derived from AVIRIS measurements of the Deepwater Horizon oil spill: Implications for spatial resolution requirements of remote sensors. Mar. Pollut. Bull. 2016, 103, 276–285. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Hu, C.; Garcia-Pineda, O.; Kourafalou, V.H.; Le Hénaff, M.; Androulidakis, Y. Remote sensing assessment of oil spills near a damaged platform in the Gulf of Mexico. Mar. Pollut. Bull. 2018, 136, 141–151. [Google Scholar] [CrossRef]
- Lu, Y.; Tian, Q.; Wang, X.; Zheng, G.; Li, X. Determining oil slick thickness using hyperspectral remote sensing in the Bohai Sea of China. Int. J. Digit. Earth 2013, 6, 76–93. [Google Scholar] [CrossRef]
- González, C.; Sánchez, S.; Paz, A.; Resano, J.; Mozos, D.; Plaza, A. Use of FPGA or GPU-based architectures for remotely sensed hyperspectral image processing. Integration 2013, 46, 89–103. [Google Scholar] [CrossRef]
- Fingas, M.; Brown, C.E. A Review of Oil Spill Remote Sensing. Sensors 2017, 18, 91. [Google Scholar] [CrossRef]
- Brown, C.W.; Lynch, P.F.; Ahmadjian, M. Applications of Infrared Spectroscopy in Petroleum Analysis and Oil Spill Identification. Appl. Spectrosc. Rev. 1975, 9, 223–248. [Google Scholar] [CrossRef]
- Fortes, F.; Ctvrtnícková, T.; Mateo, M.; Cabalín, L.; Nicolas, G.; Laserna, J. Spectrochemical study for the in situ detection of oil spill residues using laser-induced breakdown spectroscopy. Anal. Chim. Acta 2010, 683, 52–57. [Google Scholar] [CrossRef]
- Salisbury, J.W.; D’Aria, D.M.; Sabins, F.F. Thermal infrared remote sensing of crude oil slicks. Remote Sens. Environ. 1993, 45, 225–231. [Google Scholar]
- Pavlova, A.; Papazova, D. Oil-Spill Identification by Gas Chromatography-Mass Spectrometry. J. Chromatogr. Sci. 2003, 41, 271–273. [Google Scholar] [PubMed]
- Reddy, C.M.; Quinn, J.G. GC-MS analysis of total petroleum hydrocarbons and polycyclic aromatic hydrocarbons in seawater samples after the North Cape oil spill. Mar. Pollut. Bull. 1999, 38, 126–135. [Google Scholar]
- Khanna, S.; Santos, M.J.; Ustin, S.L.; Koltunov, A.; Kokaly, R.F.; Roberts, D.A. Detection of Salt Marsh Vegetation Stress and Recovery after the Deepwater Horizon Oil Spill in Barataria Bay, Gulf of Mexico Using AVIRIS Data. PLoS ONE 2013, 8, e78989. [Google Scholar]
- Jing, Y.; An, J.; Liu, Z. A Novel Edge Detection Algorithm Based on Global Minimization Active Contour Model for Oil Slick Infrared Aerial Image. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2005–2013. [Google Scholar]
- Howari, F.M. Investigation of Hydrocarbon Pollution in the Vicinity of United Arab Emirates Coasts Using Visible and Near Infrared Remote Sensing Data. J. Coast. Res. 2004, 204, 1089–1095. [Google Scholar]
- Brown, C.W.; Alberts, J.J. Fiber Optic Sensor for Petroleum. Google Patents. U.S. Patent No 6,144,026, 20 November 2001. [Google Scholar]
- Lu, Y.; Tian, Q.; Wang, J.; Wang, X.; Qi, X. Experimental study on spectral responses of offshore oil slick. Sci. Bull. 2008, 53, 3937–3941. [Google Scholar]
- De Carolis, G.; Adamo, M.; Pasquariello, G. Thickness estimation of marine oil slicks with near-infrared MERIS and MODIS imagery: The Lebanon oil spill case study. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 3002–3005. [Google Scholar]
- Clark, R.N.; Swayze, G.A.; Leifer, I.; Livo, K.E.; Lundeen, S.; Eastwood, M.; Green, R.O.; Kokaly, R.F.; Hoefen, T.; Sarture, C.; et al. A Method for Qualitative Mapping of Thick Oil Using Imaging Spectroscopy; United States Geological Survey: Reston, VA, USA, 2010.
- Clark, R.N. Spectroscopy of rocks and minerals, and principles of spectroscopy. Manual Remote Sens. 1999, 3, 2. [Google Scholar]
- Lammoglia, T.; de Souza Filho, C.R. Spectroscopic characterization of oils yielded from Brazilian offshore basins: Potential applications of remote sensing. Remote Sens. Environ. 2011, 115, 2525–2535. [Google Scholar]
- Hörig, B.; Kühn, F.; Oschütz, F.; Lehmann, F. HyMap hyperspectral remote sensing to detect hydrocarbons. Int. J. Remote Sens. 2001, 22, 1413–1422. [Google Scholar]
- Kühn, F.; Oppermann, K.; Hörig, B. Hydrocarbon Index—An algorithm for hyperspectral detection of hydrocarbons. Int. J. Remote Sens. 2004, 25, 2467–2473. [Google Scholar] [CrossRef]
- Alpers, W. Remote sensing of oil spills. In Maritime Disaster Management Symposium; Citeseer: New York, NY, USA, 2002; pp. 19–23. [Google Scholar]
- Ivanov, A.Y.; Zatyagalova, V.V. A GIS approach to mapping oil spills in a marine environment. Int. J. Remote Sens. 2008, 29, 6297–6313. [Google Scholar] [CrossRef]
- Grüner, K.; Reuter, R.; Smid, H. A new sensor system for airborne measurements of maritime pollution and of hydrographic parameters. GeoJournal 1991, 24, 103–117. [Google Scholar] [CrossRef]
- Ozigis, M.S.; Kaduk, J.D.; Jarvis, C.H. Mapping terrestrial oil spill impact using machine learning random forest and Landsat 8 OLI imagery: A case site within the Niger Delta region of Nigeria. Environ. Sci. Pollut. Res. 2019, 26, 3621–3635. [Google Scholar] [CrossRef] [PubMed]
- Ozigis, M.S.; Kaduk, J.D.; Jarvis, C.H.; da Conceição Bispo, P.; Balzter, H. Detection of oil pollution impacts on vegetation using multifrequency SAR, multispectral images with fuzzy forest and random forest methods. Environ. Pollut. 2019, 256, 113360. [Google Scholar] [CrossRef] [PubMed]
- Balogun, A.L.; Yekeen, S.T.; Pradhan, B.; Althuwaynee, O.F. Spatio-Temporal Analysis of Oil Spill Impact and Recovery Pattern of Coastal Vegetation and Wetland Using Multispectral Satellite Landsat 8-OLI Imagery and Machine Learning Models. Remote Sens. 2020, 12, 1225. [Google Scholar] [CrossRef]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and discrimination between oil spills and look-alike phenomena through neural networks. ISPRS J. Photogr. Remote Sens. 2007, 62, 264–270. [Google Scholar] [CrossRef]
- Hu, C.; Müller-Karger, F.E.; Taylor, C.; Myhre, D.; Murch, B.; Odriozola, A.L.; Godoy, G. MODIS detects oil spills in Lake Maracaibo, Venezuela. Eos Trans. Am. Geophys. Union 2003, 84, 313–319. [Google Scholar]
- Hu, C.; Li, X.; Pichel, W.G.; Muller-Karger, F.E. Detection of natural oil slicks in the NW Gulf of Mexico using MODIS imagery. Geophys. Res. Lett. 2009, 36, L01604. [Google Scholar] [CrossRef]
- Srivastava, H.; Singh, T.P. Assessment and development of algorithms to detection of oil spills using MODIS data. J. Ind. Soc. Remote Sens. 2010, 38, 161–167. [Google Scholar] [CrossRef]
- Casciello, D.; Lacava, T.; Pergola, N.; Tramutoli, V. Robust Satellite Techniques for oil spill detection and monitoring using AVHRR thermal infrared bands. Int. J. Remote Sens. 2011, 32, 4107–4129. [Google Scholar] [CrossRef]
- Lo, C.P. Applied Remote Sensing; Burnt Mill; Longman: Harlow, UK; New York, NY, USA, 1986. [Google Scholar]
- Su, W.; Su, F.; Zhou, C.; Du, Y. Optical Satellite Remote Sensing Capabilities Analysis of the Marine Oil Spill. J. GeoInf. Sci. 2012, 14, 523–530. [Google Scholar] [CrossRef]
- Nie, W.; Zhang, X. Detecting Marine Oil Spill Pollution Based on Borda Count Method of Ocean Water Surface Image. In Proceedings of the 2012 2nd International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 1–3 June 2012; pp. 1–4. [Google Scholar]
- Castro Gomez, M.G. Joint Use of Sentinel-1 and Sentinel-2 for Land Cover Classification: A Machine Learning Approach. Master’s Thesis, Lund University, Lund, Switzerland, 2017. [Google Scholar]
- Nezhad, M.M.; Groppi, D.; Laneve, G.; Marzialetti, P.; Piras, G. Oil spill detection analyzing “Sentinel 2” satellite images: A Persian Gulf case study. In Proceedings of the 3rd World Congress on Civil, Structural, and Environmental Engineering, Budapest, Hungary, 8–10 April 2018; pp. 1–8. [Google Scholar]
- Kolokoussis, P.; Karathanassi, V. Oil Spill Detection and Mapping Using Sentinel 2 Imagery. J. Mar. Sci. Eng. 2018, 6, 4. [Google Scholar] [CrossRef]
- Setiani, P.; Ramdani, F. Oil spill mapping using multi-sensor Sentinel data in Balikpapan Bay, Indonesia. In Proceedings of the 2018 4th International Symposium on Geoinformatics (ISyG), Malang, Indonesia, 10–12 November 2018; pp. 1–4. [Google Scholar]
- Espedal, H. Detection of oil spill and natural film in the marine environment by spaceborne SAR. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium. IGARSS’99 (Cat. No.99CH36293), Hamburg, Germany, 28 June–2 July 1999; Volume 3, pp. 1478–1480. [Google Scholar]
- Kostianoy, A.G.; Lebedev, S.A.; Litovchenko, K.T.; Stanichny, S.V.; Pichuzhkina, O.E. Satellite remote sensing of oil spill pollution in the southeastern Baltic Sea. Gayana Concepción 2004, 68, 327–2332. [Google Scholar] [CrossRef]
- Gallego, A.-J.; Gil, P.; Pertusa, A.; Fisher, R.B. Segmentation of Oil Spills on Side-Looking Airborne Radar Imagery with Autoencoders. Sensors 2018, 18, 797. [Google Scholar] [CrossRef]
- Chang, L.; Tang, Z.; Chang, S.; Chang, Y.-L. A region-based GLRT detection of oil spills in SAR images. Pattern Recognit. Lett. 2008, 29, 1915–1923. [Google Scholar] [CrossRef]
- Mera, D.; Bolón-Canedo, V.; Cotos, J.M.; Alonso-Betanzos, A. On the use of feature selection to improve the detection of sea oil spills in SAR images. Comput. Geosci. 2017, 100, 166–178. [Google Scholar] [CrossRef]
- Yu, F.; Sun, W.; Li, J.; Zhao, Y.; Zhang, Y.; Chen, G. An improved Otsu method for oil spill detection from SAR images. Oceanologia 2017, 59, 311–317. [Google Scholar] [CrossRef]
- Chaturvedi, S.K.; Banerjee, S.; Lele, S. An assessment of oil spill detection using Sentinel 1 SAR-C images. J. Ocean Eng. Sci. 2020, 5, 116–135. [Google Scholar] [CrossRef]
- Xu, L.; Shafiee, M.J.; Wong, A.; Clausi, D.A. Fully Connected Continuous Conditional Random Field with Stochastic Cliques for Dark-Spot Detection In SAR Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2882–2890. [Google Scholar] [CrossRef]
- Ma, X.L.; Jiao, L.C. Sar image segmentation based on watershed and spectral clustering. J. Infared. Millim. Waves 2008, 6, 013. [Google Scholar]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An Adaptive and Fast CFAR Algorithm Based on Automatic Censoring for Target Detection in High-Resolution SAR Images. IEEE Trans. Geosci. Remote Sens. 2008, 47, 1685–1697. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Alattas, R. Oil spill detection in SAR images using minimum cross-entropy thresholding. In Proceedings of the 2014 7th International Congress on Image and Signal Processing, Dalian, China, 14–16 October 2014; pp. 709–713. [Google Scholar]
- Skøelv, Å.; Wahl, T. Oil Spill Detection Using Satellite Based SAR; Phase 1B competition report; Norwegian Defence Research Establishment: Kjeller, Norway, 1993. [Google Scholar]
- Vachon, P.W.; Thomas, S.J.; Cranton, J.A.; Bjerkelund, C.; Dobson, F.W.; Olsen, R.B. Monitoring the coastal zone with the RADARSAT satellite. In Oceanology International; Brighton, UK, 10–13 March 1998; Volume 98, pp. 29–38. [Google Scholar]
- Manore, M.J.; Vachon, P.W.; Bjerkelund, C.; Edel, H.R.; Ramsay, B. Operational use of Radarsat SAR in the coastal zone—The Canadian experience. Inf. Sustain. 1998, 1998, 115–118. [Google Scholar]
- Vyas, G.; Bhan, A.; Gupta, D. Detection of oil spills using feature extraction and threshold based segmentation techniques. In Proceedings of the 2015 2nd International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 19–20 February 2015. [Google Scholar]
- Solberg, A.S.; Storvik, G.; Solberg, R.; Volden, E. Automatic detection of oil spills in ERS SAR images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1916–1924. [Google Scholar] [CrossRef]
- Solberg, A.H.; Dokken, S.T.; Solberg, R. Automatic detection of oil spills in Envisat, Radarsat and ERS SAR images. In Proceedings of the IGARSS 2003, 2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477), Toulouse, France, 21–25 July 2003; Volume 4, pp. 2747–2749. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intel. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Kanaa, T.; Tonye, E.; Mercier, G.; Onana, V.; Ngono, J.; Frison, P.-L.; Rudant, J.-P.; Garello, R. Detection of oil slick signatures in SAR images by fusion of hysteresis thresholding responses. In Proceedings of the IGARSS 2003, 2003 IEEE International Geoscience and Remote Sensing Symposium, Proceedings (IEEE Cat. No. 03CH37477), Toulouse, France, 21–25 July 2003; Volume 4, pp. 2750–2752. [Google Scholar]
- Pelizzari, S.; Bioucas-Dias, J. Oil spill segmentation of SAR images via graph cuts. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 1318–1321. [Google Scholar]
- Huang, B.; Li, H.; Huang, X. A level set method for oil slick segmentation in SAR images. Remote Sens. 2005, 26, 1145–1156. [Google Scholar] [CrossRef]
- Hu, G.; Xiao, X. Edge detection of oil spill using SAR image. In Proceedings of the 2013 Cross Strait Quad-Regional Radio Science and Wireless Technology Conference, Chengdu, China, 21–25 July 2013; pp. 466–469. [Google Scholar]
- Vyas, K.; Shah, P.; Patel, U.; Zaveri, T. Oil spill detection from SAR image data for remote monitoring of marine pollution using light weight imageJ implementation. In Proceedings of the 2015 5th Nirma University International Conference on Engineering (NUiCONE), Ahmedabad, India, 26–28 November 2015; pp. 1–6. [Google Scholar]
- Chen, F.; Yu, X.; Jiang, X.; Ren, P. Level sets with self-guided filtering for marine oil spill segmentation. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1772–1775. [Google Scholar]
- Chen, Z.; Wang, C.; Teng, X.; Cao, L.; & Li, J. Oil spill detection based on a superpixel segmentation method for SAR image. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 1725–1728. [Google Scholar]
- Mira, D.; Gil, P.; Alacid, B.; Torres, F. Oil Spill Detection using Segmentation based Approaches. In Proceedings of the 6th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2017), Porto, Portugal, 24–26 February 2017; pp. 442–447. [Google Scholar]
- Wu, S.Y.; Liu, A.K. Towards an automated ocean feature detection, extraction and classification scheme for SAR imagery. Int. J. Remote Sens. 2003, 24, 935–951. [Google Scholar] [CrossRef]
- Barni, M.; Betti, M.; Mecocci, A. A fuzzy approach to oil spill detection an SAR images. In Proceedings of the 1995 International Geoscience and Remote Sensing Symposium, IGARSS’95. Quantitative Remote Sensing for Science and Applications, Firenze, Italy, 10–14 July 1995; Volume 1, pp. 157–159. [Google Scholar]
- Li, H.Z.; Wang, C.; Zhang, H.; Wu, F.; Li, J. Oil slick spot detection using K-distribution model of the sea background. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; Volume 4, pp. IV-470–IV-473. [Google Scholar]
- Singha, S.; Bellerby, T.J.; Trieschmann, O. Satellite Oil Spill Detection Using Artificial Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2355–2363. [Google Scholar] [CrossRef]
- Gasull, A.; Fàbregas, X.; Jiménez, J.; Marqués, F.; Moreno, V.; Herrero, M.A. Oil spills detection in SAR images using mathematical morphology. In Proceedings of the 2002 11th European Signal Processing Conference, Toulouse, France, 3–6 September 2002; pp. 1–4. [Google Scholar]
- Solberg, A.H.; Brekke, C.; Husoy, P.O. Oil Spill Detection in Radarsat and Envisat SAR Images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 746–755. [Google Scholar] [CrossRef]
- Montali, A.; Giacinto, G.; Migliaccio, M.; Gambardella, A. Supervised pattern classification techniques for oil spill classification in SAR images: Preliminary results. In Proceedings of the SEASAR2006 Workshop, ESAESRIN, Frascati, Italy, 24–26 January 2006; pp. 23–26. [Google Scholar]
- Migliaccio, M.; Tranfaglia, M. Oil spill observation by SAR: A review. In Proceedings of the 2004 USA-Baltic Internation Symposium, Klaipeda, Lithuania, 15–17 June 2004; pp. 1–6. [Google Scholar]
- Singha, S.; Bellerby, T.J.; Trieschmann, O. Detection and classification of oil spill and look-alike spots from SAR imagery using an Artificial Neural Network. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5630–5633. [Google Scholar]
- Wu, D.; Guo, H.; An, J. Research on Multi-Feature Fusion for Discriminating Oil Spill and Look-Alike Spots. In Proceedings of the 2017 4th International Conference on Information Science and Control Engineering (ICISCE), Changsha, China, 21–23 July 2017; pp. 607–610. [Google Scholar]
- Karathanassi, V.; Topouzelis, K.; Pavlakis, P.; Rokos, D. An object-oriented methodology to detect oil spills. Int. J. Remote Sens. 2006, 27, 5235–5251. [Google Scholar] [CrossRef]
- Maianti, P.; Rusmini, M.; Tortini, R.; Via, G.D.; Frassy, F.; Marchesi, A.; Nodari, F.R.; Gianinetto, M. Monitoring large oil slick dynamics with moderate resolution multispectral satellite data. Nat. Hazards 2014, 73, 473–492. [Google Scholar] [CrossRef]
- Nieto-Hidalgo, M.; Gallego, A.-J.; Gil, P.; Pertusa, A. Two-Stage Convolutional Neural Network for Ship and Spill Detection Using SLAR Images. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5217–5230. [Google Scholar] [CrossRef]
- Akar, S.; Süzen, M.L.; Kaymakçi, N. Detection and object-based classification of offshore oil slicks using ENVISAT-ASAR images. Environ. Monit. Assess. 2011, 183, 409–423. [Google Scholar] [CrossRef] [PubMed]
- Su, T.F.; Li, H.Y.; Liu, T.X. Sea Oil Spill Detection Method Using SAR Imagery Combined with Object-Based Image Analysis and Fuzzy Logic. Adv. Mater. Res. 2014, 1065, 3192–3200. [Google Scholar] [CrossRef]
- Balogun, A.-L.; Marks, D.; Sharma, R.; Shekhar, H.; Balmes, C.; Maheng, D.; Arshad, A.; Salehi, P. Assessing the Potentials of Digitalization as a Tool for Climate Change Adaptation and Sustainable Development in Urban Centres. Sustain. Cities Soc. 2020, 53, 101888. [Google Scholar] [CrossRef]
- Yalcin, A.; Reis, S.; Aydinoglu, A.; Yomralioglu, T. A GIS-based comparative study of frequency ratio, analytical hierarchy process, bivariate statistics and logistics regression methods for landslide susceptibility mapping in Trabzon, NE Turkey. Catena 2011, 85, 274–287. [Google Scholar] [CrossRef]
- Marwan, M.; Ali, K.; Ouahmane, H. Security Enhancement in Healthcare Cloud using Machine Learning. Procedia Comput. Sci. 2018, 127, 388–397. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y. Synthetic aperture radar oil spills detection based on morphological characteristics. Geospatial Inf. Sci. 2014, 17, 8–16. [Google Scholar] [CrossRef]
- Wan, J.; Cheng, Y. Remote sensing monitoring of Gulf of Mexico oil spill using ENVISAT ASAR images. In Proceedings of the 2013 21st International Conference on Geoinformatics; Institute of Electrical and Electronics Engineers (IEEE), Kaifeng, China, 20–22 June 2013; pp. 1–5. [Google Scholar]
- Singha, S.; Vespe, M.; Trieschmann, O. Automatic Synthetic Aperture Radar based oil spill detection and performance estimation via a semi-automatic operational service benchmark. Mar. Pollut. Bull. 2013, 73, 199–209. [Google Scholar] [CrossRef]
- Topouzelis, K.; Psyllos, A. Oil spill feature selection and classification using decision tree forest on SAR image data. ISPRS J. Photogramm. Remote Sens. 2012, 68, 135–143. [Google Scholar] [CrossRef]
- Li, Q.; Lu, L.; Zhang, B.; Tong, Q. Oil Slope Index: An algorithm for crude oil spill detection with imaging spectroscopy. In Proceedings of the 2012 IEEE 2nd International Workshop on Earth Observation and Remote Sensing Applications, Shanghai, China, 8–11 June 2012; pp. 46–49. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Motagh, M. Random forest wetland classification using ALOS-2 L-band, RADARSAT-2 C-band, and TerraSAR-X imagery. ISPRS J. Photogramm. Remote Sens. 2017, 130, 13–31. [Google Scholar] [CrossRef]
- Wang, W.; Yang, X.; Li, X.; Chen, K.; Liu, G.; Li, Z.; Gade, M. A Fully Polarimetric SAR Imagery Classification Scheme for Mud and Sand Flats in Intertidal Zones. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1–9. [Google Scholar] [CrossRef]
- Tong, S.; Liu, X.; Chen, Q.-H.; Zhang, Z.; Xie, G. Multi-Feature Based Ocean Oil Spill Detection for Polarimetric SAR Data Using Random Forest and the Self-Similarity Parameter. Remote Sens. 2019, 11, 451. [Google Scholar] [CrossRef]
- Ma, Y.; Zeng, K.; Zhao, C.; Ding, X.; He, M. Feature selection and classification of oil spills in SAR image based on statistics and artificial neural network. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 569–571. [Google Scholar]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.A.A.; Ciompi, F.; Ghafoorian, M.; Van Der Laak, J.A.; Van Ginneken, B.; Sánchez, C.I. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 42, 60–88. [Google Scholar] [CrossRef] [PubMed]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Yekeen, S.T.; Balogun, A.; Yusof, K.B.W. A novel deep learning instance segmentation model for automated marine oil spill detection. ISPRS J. Photogramm. Remote Sens. 2020, 167, 190–200. [Google Scholar] [CrossRef]
- Ramalho, G.L.B.; Medeiros, F. Using Boosting to Improve Oil Spill Detection in SAR Images. In Proceedings of the IEEE 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; Volume 2, pp. 1066–1069. [Google Scholar]
- Chen, G.; Li, Y.; Sun, G.; Zhang, Y. Application of Deep Networks to Oil Spill Detection Using Polarimetric Synthetic Aperture Radar Images. Appl. Sci. 2017, 7, 968. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M.J.C. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001; Volume 1, p. 3. [Google Scholar]
- Gu, Q.; Sheng, L.; Zhang, T.; Lu, Y.; Zhang, Z.; Zheng, K.; Hu, H.; Zhou, H. Early detection of tomato spotted wilt virus infection in tobacco using the hyperspectral imaging technique and machine learning algorithms. Comput. Electron. Agric. 2019, 167, 105066. [Google Scholar] [CrossRef]
- Barbat, M.M.; Wesche, C.; Werhli, A.V.; Mata, M.M. An adaptive machine learning approach to improve automatic iceberg detection from SAR images. ISPRS J. Photogramm. Remote Sens. 2019, 156, 247–259. [Google Scholar]
- Barbedo, J.G.A. Detection of nutrition deficiencies in plants using proximal images and machine learning: A review. Comput. Electron. Agric. 2019, 162, 482–492. [Google Scholar]
- Gunter, N.B.; Schwarz, C.G.; Graff-Radford, J.; Gunter, J.L.; Jones, D.T.; Graff-Radford, N.R.; Petersen, R.C.; Knopman, D.S.; Jack, C.R. Automated detection of imaging features of disproportionately enlarged subarachnoid space hydrocephalus using machine learning methods. NeuroImage Clin. 2019, 21, 101605. [Google Scholar] [PubMed]
- Castanedo, S.; Juanes, J.A.; Medina, R.; Puente, A.; Fernandez, F.; Olabarrieta, M.; Pombo, C. Oil spill vulnerability assessment integrating physical, biological and socio-economical aspects: Application to the Cantabrian coast (Bay of Biscay, Spain). J. Environ. Manag. 2009, 91, 149–159. [Google Scholar]
- DePellegrin, D.; Pereira, P. Assessing oil spill sensitivity in unsheltered coastal environments: A case study for Lithuanian-Russian coasts, South-eastern Baltic Sea. Mar. Pollut. Bull. 2016, 102, 44–57. [Google Scholar]
- Azevedo, A.; Fortunato, A.B.; Epifânio, B.; Boer, S.D.; Oliveira, E.R.; Alves, F.L.; De Jesus, G.; Gomes, J.L.; Oliveira, A. An oil risk management system based on high-resolution hazard and vulnerability calculations. Ocean Coast. Manag. 2017, 136, 1–18. [Google Scholar]
- Kankara, R.S.; Arockiaraj, S.; Prabhu, K. Environmental sensitivity mapping and risk assessment for oil spill along the Chennai Coast in India. Mar. Pollut. Bull. 2016, 106, 95–103. [Google Scholar]
- Guo, W.; Hao, Y.; Zhang, L.; Xu, T.; Ren, X.; Cao, F.; Wang, S. Development and application of an oil spill model with wave–current interactions in coastal areas. Mar. Pollut. Bull. 2014, 84, 213–224. [Google Scholar]
- Gług, M.; Wąs, J. Modeling of oil spill spreading disasters using combination of Langrangian discrete particle algorithm with Cellular Automata approach. Ocean Eng. 2018, 156, 396–405. [Google Scholar]
- Chiu, C.-M.; Huang, C.-J.; Wu, L.-C.; Zhang, Y.J.; Chuang, L.Z.-H.; Fan, Y.; Yu, H.-C. Forecasting of oil-spill trajectories by using SCHISM and X-band radar. Mar. Pollut. Bull. 2018, 137, 566–581. [Google Scholar]
- Lynch, D.R.; Greenberg, D.A.; Bilgili, A.; McGillicuddy, D.J., Jr.; Manning, J.P.; Aretxabaleta, A.L. Particles in the Coastal Ocean: Theory and Applications; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Spaulding, M.L. State of the art review and future directions in oil spill modeling. Mar. Pollut. Bull. 2017, 115, 7–19. [Google Scholar] [CrossRef]
- Fay, J.A. Physical processes in the spread of oil on a water surface. In International Oil Spill Conference; American Petroleum Institute: Washington, DC, USA, 1971; Volume 1971, pp. 463–467. [Google Scholar]
- Mackay, D.; Buist, I.; Mascarenhas, R.; Paterson, S. Oil spill processes and models. In Environment Canada Report EE-8; Environmental Protection Service: Ottawa, ON, Canada, 1980. [Google Scholar]
- Mackay, D.; Shiu, W.Y.; Hossain, K.; Stiver, W.; McCurdy, D. Development and Calibration of an Oil Spill Behavior Model; Toronto University Dept of Chemical Engineering and Applied Chemistry: Toronto, ON, Canada, 1982. [Google Scholar]
- Elliott, A.; Hurford, N.; Penn, C. Shear diffusion and the spreading of oil slicks. Mar. Pollut. Bull. 1986, 17, 308–313. [Google Scholar] [CrossRef]
- Johansen, O. The Halten Bank experiment-observations and model studies of drift and fate of oil in the marine environment. In Proceedings of the 11th Arctic Marine Oil Spill Program (AMOP) Techn. Seminar. Environment Canada, Ottawa, ON, Canada, 7–9 June 1984; pp. 18–36. [Google Scholar]
- Galt, J.A.; Overstreet, R. Development of Spreading Algorithms for the ROC. In Response Options Calculator; Genwest: Edmonds, WA, USA, 2009. [Google Scholar]
- Berry, A.; Dabrowski, T.; Lyons, K. The oil spill model OILTRANS and its application to the Celtic Sea. Mar. Pollut. Bull. 2012, 64, 2489–2501. [Google Scholar] [CrossRef] [PubMed]
- Yu, F.; Xue, S.; Zhao, Y.; Chen, G. Risk assessment of oil spills in the Chinese Bohai Sea for prevention and readiness. Mar. Pollut. Bull. 2018, 135, 915–922. [Google Scholar] [CrossRef] [PubMed]
- Amir-Heidari, P.; Raie, M. Response planning for accidental oil spills in Persian Gulf: A decision support system (DSS) based on consequence modeling. Mar. Pollut. Bull. 2019, 140, 116–128. [Google Scholar] [CrossRef]
- Jones, A.; Logan, G.; Kennard, J.; Rollet, N. Reassessing potential origins of synthetic aperture radar (sar) slicks from the timor sea region of the north west shelf on the basis of field and ancillary data. Appea J. 2005, 45, 311–332. [Google Scholar] [CrossRef]
- Jones, A.; Thankappan, M.; Logan, G.A.; Kennard, J.M.; Smith, C.J.; Williams, A.K.; Lawrence, G.M. Coral spawn and bathymetric slicks in Synthetic Aperture Radar (SAR) data from the Timor Sea, north-west Australia. Int. J. Remote Sens. 2006, 27, 2063–2069. [Google Scholar] [CrossRef]
- Thankappan, M.; Rollet, N.; Smith, C.J.; Jones, A.; Logan, G.; Kennard, J. Assessment of SAR ocean features using optical and marine survey data. In Proceedings of the Envisat Symposium, Montreux, Switzerland, 23–27 April 2007; Volume 2327. [Google Scholar]
- Wettle, M.; Daniel, P.J.; Logan, G.A.; Thankappan, M. Assessing the effect of hydrocarbon oil type and thickness on a remote sensing signal: A sensitivity study based on the optical properties of two different oil types and the HYMAP and Quickbird sensors. Remote Sens. Environ. 2009, 113, 2000–2010. [Google Scholar] [CrossRef]
- Lotliker, A.A.; Mupparthy, R.S.; Tummala, S.K.; Nayak, S.R. Evaluation of high resolution MODIS-Aqua data for oil spill monitoring. In Remote Sensing of Inland, Coastal, and Oceanic Waters; International Society for Optics and Photonics: Bellingham, WA, USA, 2008; Volume 7150, p. 71500S. [Google Scholar]
- Brown, C.E.; Fingas, M.F. New space-borne sensors for oil spill response. In International Oil Spill Conference; American Petroleum Institute: Washington, DC, USA, 2001; Volume 2001, pp. 911–916. [Google Scholar]
- Fingas, M.; Brown, C.E. Review of oil spill remote sensing. Spill Sci. Technol. Bull. 1997, 4, 199–208. [Google Scholar] [CrossRef]
- Yekeen, S.T.; Balogun, A.L. Automated Marine Oil Spill Detection Using Deep Learning Instance Segmentation Model. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2020, XLIII-B3-2020, 1271–1276. [Google Scholar] [CrossRef]
- Xing, Q.; Li, L.; Lou, M.; Bing, L.; Zhao, R.; Li, Z. Observation of Oil Spills through Landsat Thermal Infrared Imagery: A Case of Deepwater Horizon. Aquat. Procedia 2015, 3, 151–156. [Google Scholar] [CrossRef]
- Espedal, H. Satellite SAR oil spill detection using wind history information. Int. J. Remote Sens. 1999, 20, 49–65. [Google Scholar] [CrossRef]
- Zeng, K.; Wang, Y. A Deep Convolutional Neural Network for Oil Spill Detection from Spaceborne SAR Images. Remote Sens. 2020, 12, 1015. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, H.; Luo, Q.; Li, Y.; Wei, J.; Li, J. Oil Spill Detection in Quad-Polarimetric SAR Images Using an Advanced Convolutional Neural Network Based on SuperPixel Model. Remote Sens. 2020, 12, 944. [Google Scholar] [CrossRef]
- Robbe, N.; Hengstermann, T. Remote sensing of marine oil spills from airborne platforms using multi-sensor systems. Des. Nat. III Comparing Des. Nat. Sci. Eng. 2006, 95, 347–355. [Google Scholar]
- Fingas, M.; Brown, C.E. Chapter 6—Oil Spill Remote Sensing: A Review. In Oil Spill Science and Technology; Fingas, M., Ed.; Gulf Professional Publishing: Boston, MA, USA, 2011; pp. 111–169. [Google Scholar]
- Fingas, M.; Brown, C.E. Oil spill remote sensing. In Earth System Monitoring; Springer: New York, NY, USA, 2013; pp. 337–388. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Launch Year | Frequency (GHz) | Band | Operator |
|---|---|---|---|---|
| SEASAT | 1978 | 1.27 GHz | L | National Aeronautics and Space Administration (NASA) |
| ERS-1 | 1991 | 5.5 GHz | C | European Remote Sensing Satellite |
| ERS-2 | 1995 | 5.5 GHz | C | European Remote Sensing Satellite |
| ENVISAT-ASAR | 2005 | 5.30 | C | European Remote Sensing Satellite |
| TerraSAR-X | 2005 | 9.65 | X | European Remote Sensing Satellite |
| ALOS-PALSAR | 2006 | 1.27 | L | European Remote Sensing Satellite |
| RADARSAT-2 | 2007 | 5.40 | X | German Earth observation satellite |
| Tandem-X | 2010 | 9.65 | X | German Earth observation satellite |
| Cosmos Skymed-1 | 2007 | 9.65 | X | Italian Space Agency |
| Cosmos Skymed-2 | 2010 | 9.65 | X | Italian Space Agency |
| TecSAR | 2008 | 9.59 | X | Israel Aerospace Industries |
| Kompsat-5 | 2013 | 9.66 | X | Korean Space Agency |
| Sentinel-1a and -1b | 2013/2016 | 5.405 | C | European Space Agency |
| RADARSAT-Constellation (3 satellites) | 2018 | 5.405 | C | Canadian Space Agency |
| N | Feature Category | Feature | Code |
|---|---|---|---|
| 1 | Geometric/shape feature | Area | A |
| 2 | Perimeter | P | |
| 3 | slick complexity | C | |
| 4 | perimeter to area ratio | P/A | |
| 5 | shape factor I | SP1 | |
| 6 | slick width | SW | |
| 7 | Spreading | S | |
| 8 | Backscatter feature | Dark spot mean | DSMe |
| 9 | dark spot standard deviation | DSSd | |
| background mean | BMe | ||
| 1 | backgrounds standard deviation | BSd | |
| 1 | dark spot power to mean ratio | OPm/Bpm | |
| 1 | mean contrast | ConMe | |
| 1 | max contrast | ConMax | |
| 1 | Gradient feature | Gradient mean | Gme |
| 1 | gradient standard deviation | Gsd | |
| 1 | gradient max | GMax | |
| 1 | gradient min | GMin | |
| 1 | gradient power to mean ratio | Gpm |
| Sensors | Spatial Resolution | 24-h Operation Ability | False Positive Effect | Altitude | Weather Operation |
|---|---|---|---|---|---|
| Visible | high | No | Affected by elements such as seaweed, darker shoreline) | Below or Above 500 m | Affected by cloudy and non-clear weather |
| Infrared | High | Yes | Affected by seaweed and shoreline | Below or above 250 m | Affected by heavy fog and cloudy sky |
| Near-Infrared | High | Yes | Affected by seaweed and shoreline | Below or above 250 m | Affected by heavy fog and cloudy sky |
| Ultraviolent | High | No | Sun glint, wind sheen, and seaweed cause lookalikes. | Below or above 250 m. | Requires a clearer atmosphere |
| Optical Satellite | Medium | Yes | Sun glint, wind sheen, and seaweed cause lookalikes. | 700–900 km | Affected by heavy cloud cover |
| Radar sensor | High | Yes | Affected by several elements such as high wave, seaweed, grease, etc. | Airborne (10–12 km) and Satellite (700–900 km) | It can work under any weather condition, but wind speed contributes to the detection of oil spill. |
| Author | Task | Algorithm | Method | Accuracy |
|---|---|---|---|---|
| [164] | Oil spill detection from Radarsat-2 and UAVSAR polarimetric SAR images | Random Forest classifier | Machine learning | Overall accuracy of 92.99% and 82.25% were achieved from the two datasets respectively. |
| [113] | Segmentation of oil spills on side-looking airborne radar imagery | Deep Neural autoencoders | Deep learning | F1 score accuracy of 93.1% |
| [171] | Oil spill detection using Polarimetric Synthetic Aperture Radar Images | Deep Learning Algorithms (Stacked Auto Encoder and Deep Belief Network) | Deep learning | Above 80.0% ROC accuracy |
| [203] | Observation of oil spills through Landsat thermal infrared imagery | Ocean surface temperature. | Traditional segmentation method | Reported a high accuracy (accuracy percentage was not documented) |
| [156] | Oil spill detection based on morphological attributes | SVM | Machine learning | Reported a high accuracy (accuracy percentage was not documented) |
| [126] | Using feature extraction and threshold-based segmentation for oil spill detection on SAR images | Spot Extraction and Global Threshold | Traditional segmentation method | Reported a high accuracy (accuracy percentage was not documented) |
| [204] | Satellite SAR oil spill detection using wind history information | Wind history | Traditional segmentation method | Reported a high accuracy (accuracy percentage was not documented) |
| [45] | Identification of marine oil spill from SAR images | Semantic segmentation algorithms (UNet, LinkNet, PSPNet, DeepLabv2, DeepLabv2 (msc), DeepLabv3+) | Deep learning | DeepLab3+ had the highest mIoU accuracy 65.06% |
| [115] | Feature selection for faster marine oil spill detection from SAR images | SVM | Machine learning | 87.1% and 74.6% overall accuracy and Cohen’s kappa coefficient. |
| [149] | Monitoring large oil slick dynamics in optical MODIS images | Object-based images analysis | Object-based images analysis | Highest user accuracy at 94.2% and producer accuracy at 73.5%. |
| [150] | Coast, Ship and oil spill detection from side-looking airborne radar images | Two-stage CNN | Deep learning | 98.34% overall accuracy was achieved. |
| [151] | Detection and object-based classification of oil spill and lookalike | Object-based fuzzy classification | Object-based images analysis | 83% overall accuracy for oil spills and 77% for lookalikes |
| [152] | Oil spill detection from SAR images | Object-based images analysis and Fuzzy logic | Object-based images analysis | 97.34% oil spill probability accuracy |
| [205] | Oil spill detection from spaceborne SAR images | Deep convolutional neural networks algorithm | Deep learning | An overall accuracy, recall and precision value of 94.1%, 83.51 and 85.70% were achieved respectively. |
| [206] | Oil spill detection from Quad-Polarimetric SAR images | CNN | Deep learning | Mean Intersection over Union (MIoU) accuracy of 90.5% was achieved. |
| [169,202] | Detection of oil spill, lookalike, ship, and land area | Mask R-CNN | Deep leaning instance segmentation | Overall accuracy of 96.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Temitope Yekeen, S.; Balogun, A.-L. Advances in Remote Sensing Technology, Machine Learning and Deep Learning for Marine Oil Spill Detection, Prediction and Vulnerability Assessment. Remote Sens. 2020, 12, 3416. https://doi.org/10.3390/rs12203416
Temitope Yekeen S, Balogun A-L. Advances in Remote Sensing Technology, Machine Learning and Deep Learning for Marine Oil Spill Detection, Prediction and Vulnerability Assessment. Remote Sensing. 2020; 12(20):3416. https://doi.org/10.3390/rs12203416
Chicago/Turabian StyleTemitope Yekeen, Shamsudeen, and Abdul-Lateef Balogun. 2020. "Advances in Remote Sensing Technology, Machine Learning and Deep Learning for Marine Oil Spill Detection, Prediction and Vulnerability Assessment" Remote Sensing 12, no. 20: 3416. https://doi.org/10.3390/rs12203416
APA StyleTemitope Yekeen, S., & Balogun, A.-L. (2020). Advances in Remote Sensing Technology, Machine Learning and Deep Learning for Marine Oil Spill Detection, Prediction and Vulnerability Assessment. Remote Sensing, 12(20), 3416. https://doi.org/10.3390/rs12203416