Complex Surface Displacements above the Storage Cavern Field at Epe, NW-Germany, Observed by Multi-Temporal SAR-Interferometry

Abstract
1. Introduction
2. Materials and Methods
2.1. Data
2.2. Methodology
2.2.1. Modelling for Support of Unwrapping
2.2.2. Modelling Used for Orbit Combination
2.2.3. InSAR Methodology
- The model is estimated from wrapped phase immediately before phase unwrapping during iteration 2, when other error terms have been removed for the first time and do no longer heavily influence the estimation.
- At the end of iteration 2 during estimation of scn, the unwrapping result may be considered relatively stable because it was determined from a corrected phase. Hence the model is estimated for the first time from unwrapped phase after the other error terms have been removed (scla and starting from iteration 4 also scn of the iteration before).
- After the model has been estimated from the unwrapped phase this estimate is used for correction before phase unwrapping.
- A second important improvement is the iterative refinement of scn. This is done for the first time in iteration 4, as in iteration 3 the estimation of the model proved stable and hence scn of iteration 3 does no longer contain leaked signal.
- Estimation of scla is done without refinement although this could be considered for scenes with significant topography.
- As the runtime of a parameter space search increases exponentially with its dimension the model parameters are only determined for the points inside a window that has been defined beforehand.
- In order to avoid unwrapping problems near the window frame a smooth transition between the modelled phase in the inside and zero on the outside is enforced.
- To prevent that badly estimated parameters influence unwrapping negatively, the parameters are spatially filtered.
- Spatially correlated noise generally will be significant during early iterations. Therefore, a sub-window has been defined, that serves as reference area. The mean phase of the points in this window are subtracted from wrapped phase before the model parameters are determined.
2.2.4. Orbit Combination
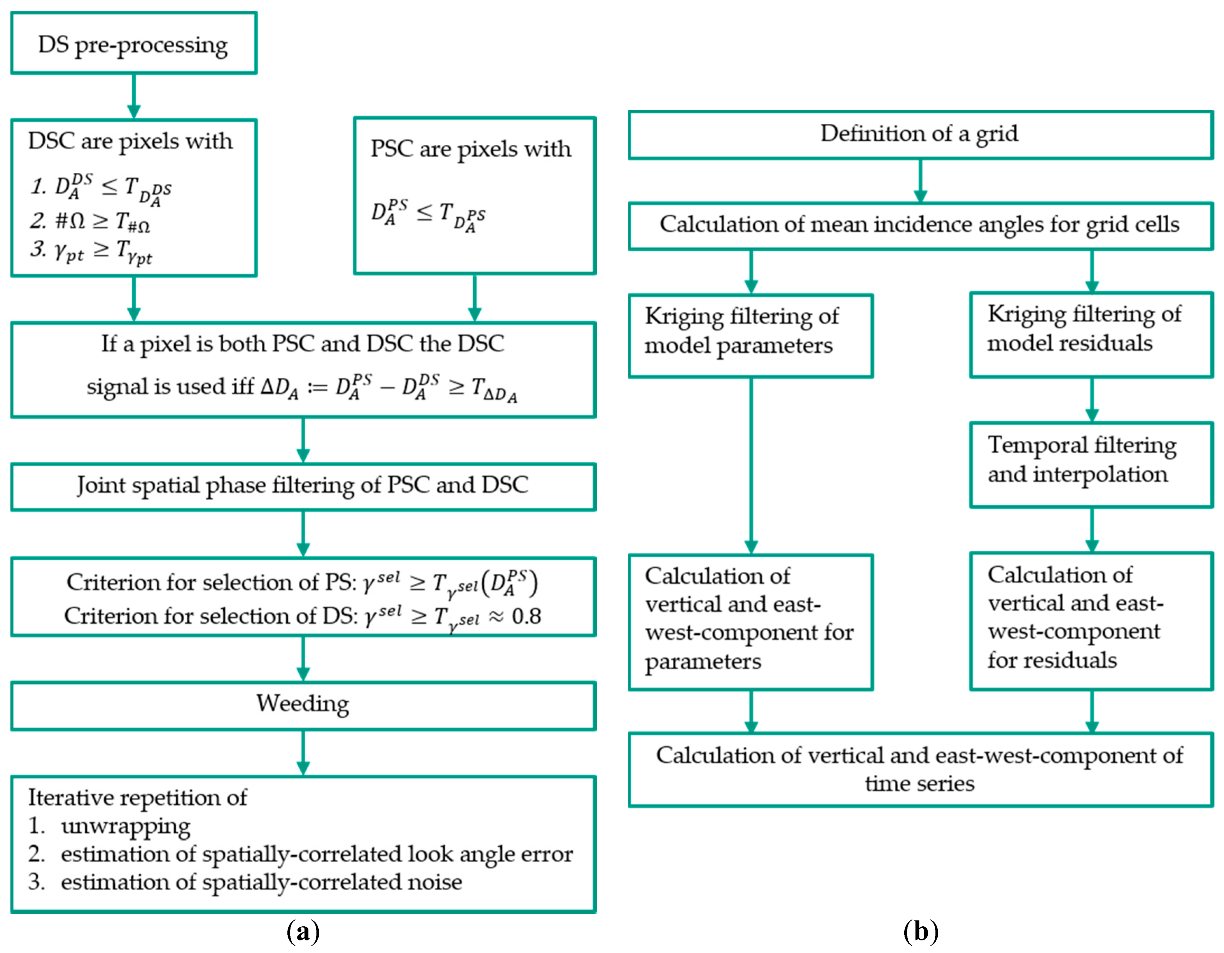
- Definition of a grid to which values shall be interpolated (Gauß-Krüger coordinates and cells of 100 m times 100 m were used). As it makes sense to process only grid cells that contain points from both orbits their size has been chosen in a way that almost all points fall in such relevant grid cells.
- For each grid cell and both orbits a mean incidence angle was calculated by averaging over the values for the points lying in the cell.
- Kriging filtering [49] is used to interpolate for each acquisition and orbit the values of the displacement time series to the relevant grid cells.
- Time series of each orbit were filtered with robust quadratic regression in a moving window (of length 9 acquisitions) to remove any outliers left. Acquisitions outside the overlap of the two series were discarded. The period between 5 February 2015 and 21 December 2017 remained.
- The linear equation system for orbit combination for each point and using the interpolated time series was solved in an analogous way as was done by [50].
3. Results
3.1. Joint Processing of DS and PS
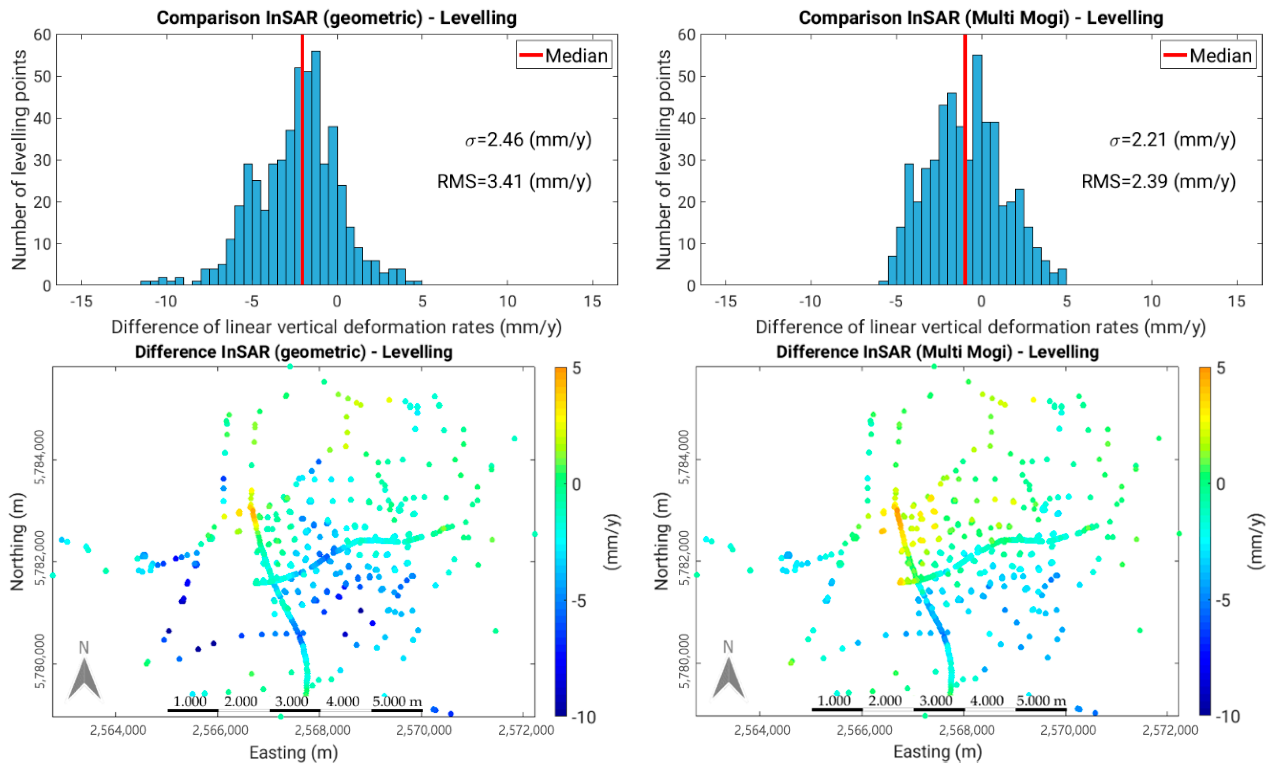
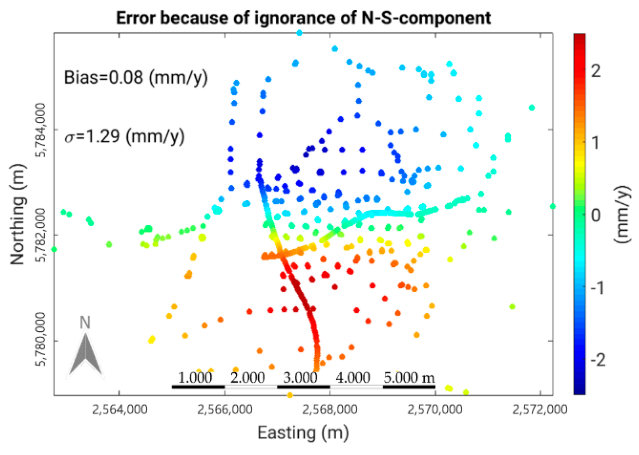
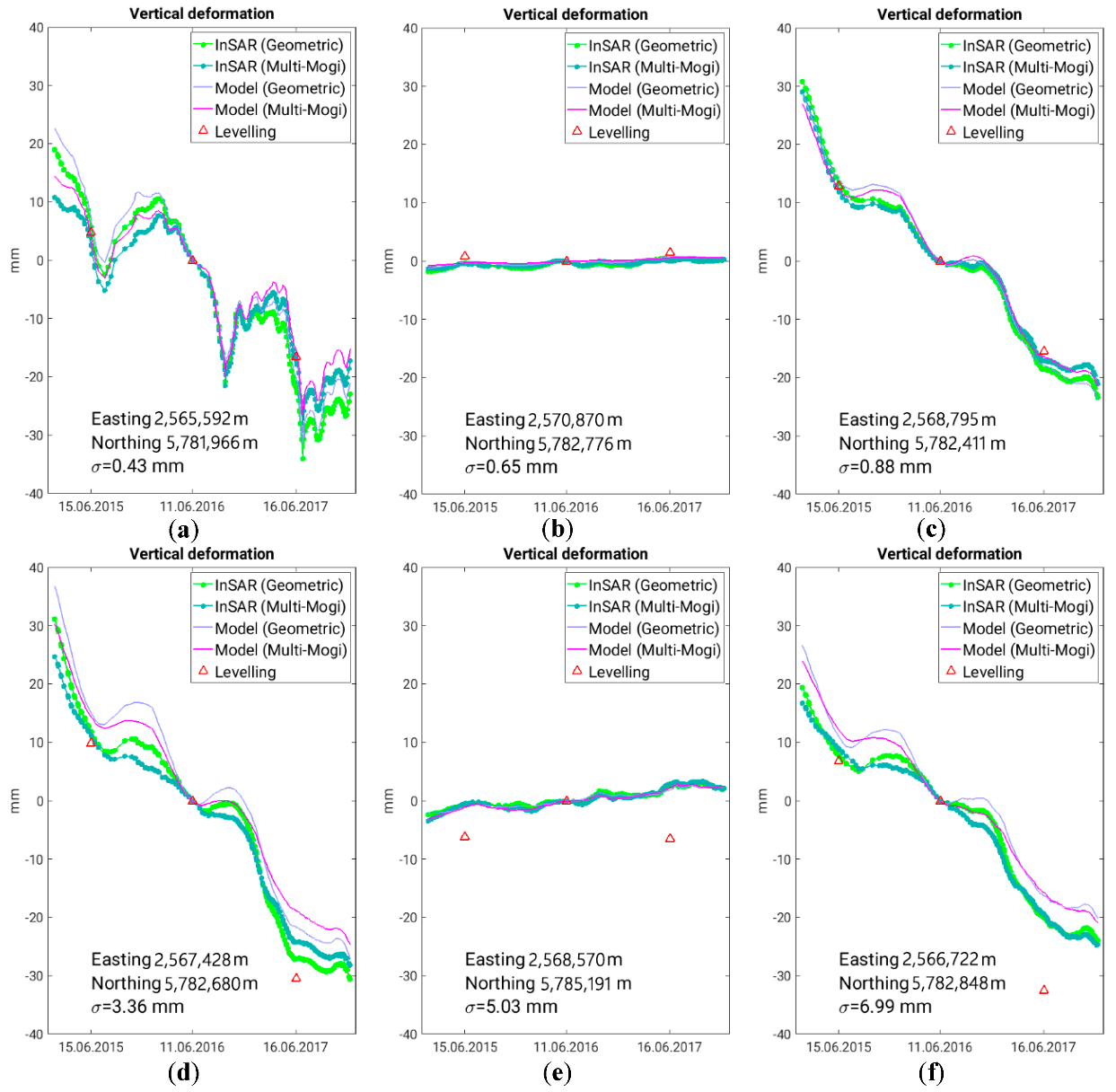
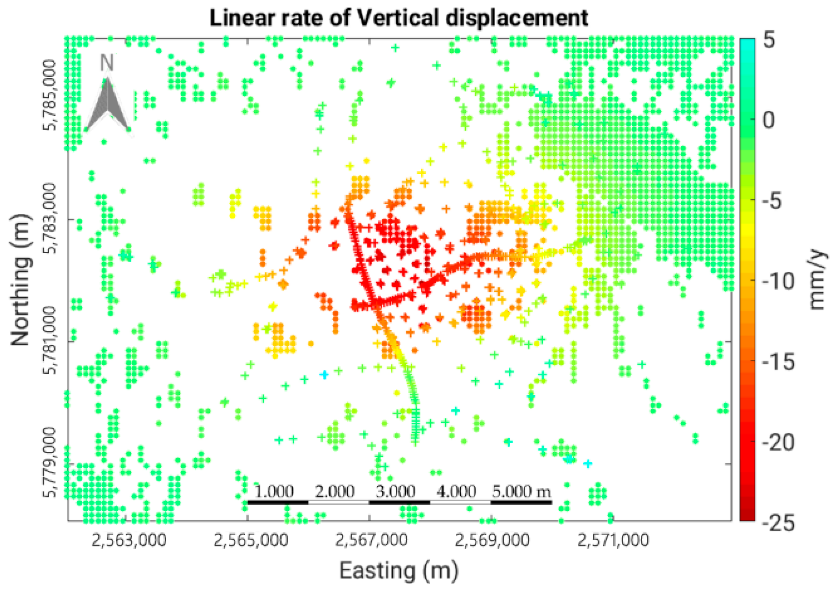
3.2. Orbit Combination
4. Discussion
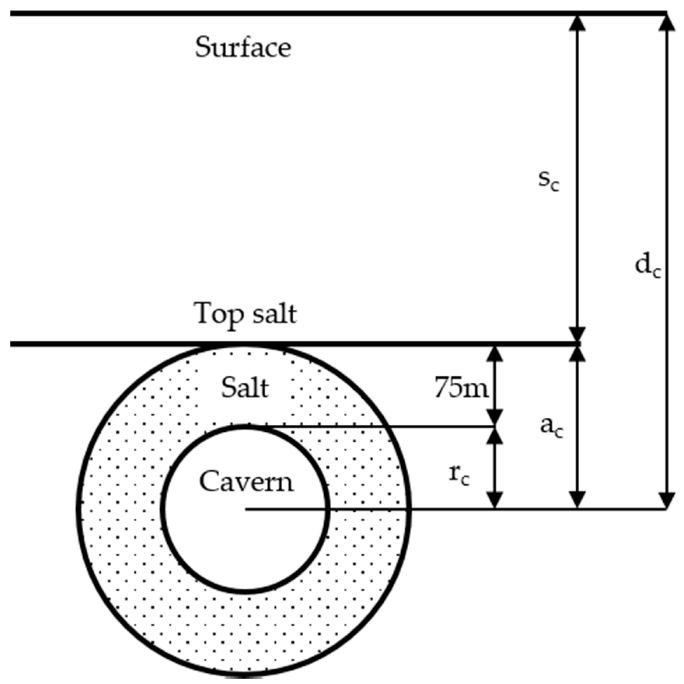
- As already discussed above, the geophysical situation is simplistically modelled. In particular, the model assumes that the caverns each are in the center of a salt sphere while in reality the salt is deposited as an approximately horizontal layer. We also deliberated if the elongated shape of the caverns in vertical direction might cause a bigger ratio between magnitude of vertical and horizontal displacement than is predicted by the Mogi model, but because of their depth of more than 1000 m this likely has no influence.
- The values of the incidence angles may at least partially explain that the Multi-Mogi estimation is less influenced by horizontal displacement and performs better for vertical displacement.
5. Conclusions
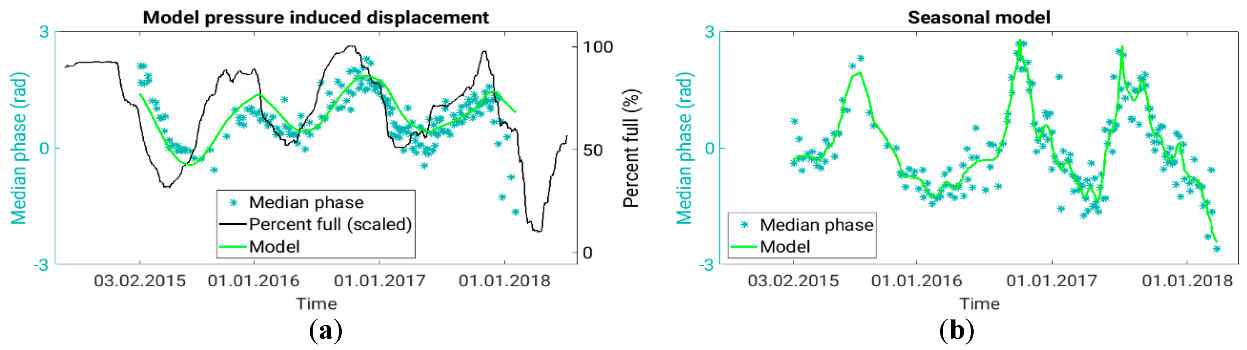
- Geomechanical modelling provided the temporal model for displacements responding to pressure changes in the gas filled caverns. While for reservoirs in elastic media the displacements are directly proportional to pressure changes of the gas, pressure signals passing through a viscos medium (salt) experience a retardation that can be described by equation (2). The presented approach is to the best of our knowledge the first, where such a model is derived for the use with InSAR for caverns situated in salt.
- StaMPS needed to be improved in several ways for dealing with the challenging displacement field at Epe. The possibility to use a phase model was implemented in order to support unwrapping and to enhance signal filtering. Furthermore, the iterative estimation scheme of StaMPS was refined, what prevents leakage of the displacement signal to the spatially correlated noise term. In addition, joint processing of PS and DS as recently introduced in [20] was applied. The results presented in this study confirm the validity of the approach of [20]. In particular, the DS allowed to extend observations to the fen in the western part of the storage site, where no information was available with PS alone.
- A novelty of the orbit combination implemented for this study is that the different components of the phase model are combined separately. This allowed for a better understanding of the phenomena that contribute to the displacement field. We named this approach geometric orbit combination.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vasco, D.W.; Ferretti, A.; Novali, F. Estimating permeability from quasi-static deformation: Temporal variations and arrival-time inversion. Geophysics 2008, 73, O37–O52. [Google Scholar] [CrossRef]
- Vasco, D.W.; Ferretti, A.; Novali, F. Reservoir monitoring and characterization using satellite geodetic data: Interferometric synthetic aperture radar observations from the Krechba field, Algeria. Geophysics 2008, 73, WA113–WA122. [Google Scholar] [CrossRef]
- Vasco, D.W.; Rucci, A.; Ferretti, A.; Novali, F.; Bissell, R.C.; Ringrose, P.S.; Mathieson, A.S.; Wright, I.W. Satellite-based measurements of surface deformation reveal fluid flow associated with the geological storage of carbon dioxide. Geophys. Res. Lett. 2010, 37, 1–5. [Google Scholar] [CrossRef]
- Tamburini, A.; Bianchi, M.; Giannico, C.; Novali, F. Retrieving surface deformation by PSInSARTM technology: A powerful tool in reservoir monitoring. Int. J. Greenh. Gas Control 2010, 4, 928–937. [Google Scholar] [CrossRef]
- Rucci, A.; Vasco, D.W.; Novali, F. Fluid pressure arrival time tomography: Estimation and assessment in the presence of inequality constraints, with an application to production at the Krechba field, Algeria. Geophysics 2010, 75, 39–55. [Google Scholar] [CrossRef]
- Rocca, F.; Rucci, A.; Ferretti, A.; Bohane, A. Advanced InSAR interferometry for reservoir monitoring. First Break 2013, 31, 77–85. [Google Scholar]
- Rucci, A.; Vasco, D.W.; Novali, F. Monitoring the geologic storage of carbon dioxide using multicomponent SAR interferometry. Geophys. J. Int. 2013, 193, 197–208. [Google Scholar] [CrossRef]
- Teatini, P.; Castelletto, N.; Ferronato, M.; Gambolati, G.; Janna, C.; Cairo, E.; Marzorati, D.; Colombo, D.; Ferretti, A.; Bagliani, A.; et al. Geomechanical response to seasonal gas storage in depleted reservoirs: A case study in the Po River basin, Italy. J. Geophys. Res. Space Phys. 2011, 116. [Google Scholar] [CrossRef]
- Fokker, P.A.; Visser, K.; Peters, E.; Kunakbayeva, G.; Muntendam-Bos, A. Inversion of surface subsidence data to quantify reservoir compartmentalization: A field study. J. Pet. Sci. Eng. 2012, 10–21. [Google Scholar] [CrossRef]
- Comola, F.; Janna, C.; Lovison, A.; Minini, M.; Tamburini, A.; Teatini, P. Efficient global optimization of reservoir geomechanical parameters based on synthetic aperture radar-derived ground displacements. Geophysics 2016, 81, M23–M33. [Google Scholar] [CrossRef]
- Velasco, V.; Sanchez, C.; Papoutsis, I.; Antoniadi, S.; Kontoes, C.; Aifantopoulou, D.; Paralykidis, S. Ground deformation mapping and monitoring of salt mines using InSAR technology. In Proceedings of the Solution Mining Research Institute Fall 2017 Technical Conference, Münster, Germany, 25–26 September 2017. [Google Scholar]
- Burnol, A.; Aochi, H.; Raucoules, D.; Veloso, F.M.L.; Koudogbo, F.N.; Fumagalli, A.; Chiquet, P.; Maisons, C. Wavelet-based analysis of ground deformation coupling satellite acquisitions (Sentinel-1, SMOS) and data from shallow and deep wells in Southwestern France. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef]
- Ferretti, A.; Tamburini, A.; Novali, F.; Fumagalli, A.; Falorni, G.; Rucci, A. Impact of high resolution radar imagery on reservoir monitoring. Energy Procedia 2011, 4, 3465–3471. [Google Scholar] [CrossRef]
- Kuehn, F.; Hoth, P.; Stark, M.; Burren, R.; Hole, J. Experience with satellite radar for gas storage monitoring. Erdöl Erdgas Kohle 2009, 125, 452–460. [Google Scholar]
- Jha, B.; Bottazzi, F.; Wojcik, R.; Coccia, M.; Bechor, N.; McLaughlin, D.; Herring, T.; Hager, B.H.; Mantica, S.; Juanes, R. Reservoir characterization in an underground gas storage field using joint inversion of flow and geodetic data. Int. J. Numer. Anal. Methods Géoméch. 2015, 39, 1619–1638. [Google Scholar] [CrossRef]
- Morgan, J.; Snider-Lord, A.C.; Ambs, D.C. InSAR for monitoring cavern integrity: 2D surface movement over Bryan Mound. In Proceedings of the Solution Mining Research Institute Spring 2018 Technical Conference, Salt Lake City, UT, USA, 18 June 2018. [Google Scholar]
- Meyers, M.A.; Chawla, K.K. Mechanical Behavior of Materials, 2nd ed.; Cambridge University Press: New York, NY, USA, 2009; pp. 1–856. [Google Scholar]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A new algorithm for processing interferometric data-stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Even, M.; Schulz, K. InSAR deformation analysis with distributed scatterers: A review complemented by new advances. Remote Sens. 2018, 10, 744. [Google Scholar] [CrossRef]
- Even, M. Adapting stamps for jointly processing distributed scatterers and persistent scatterers. In Proceedings of the IGARSS 2019–2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; pp. 2046–2049. [Google Scholar] [CrossRef]
- Hooper, A.; Segall, P.; Zebker, H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res. Space Phys. 2007, 112, 1–21. [Google Scholar] [CrossRef]
- StaMPS Homepage. Available online: https://homepages.see.leeds.ac.uk/~earahoo/stamps/ (accessed on 12 September 2013).
- Gray, L. Using multiple RADARSAT InSAR pairs to estimate a full three-dimensional solution for glacial ice movement. Geophys. Res. Lett. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Hu, J.; Li, Z.; Ding, X.; Zhu, J.; Zhang, L.; Sun, Q. Resolving three-dimensional surface displacements from InSAR measurements: A review. Earth Sci. Rev. 2014, 133, 1–17. [Google Scholar] [CrossRef]
- Joughin, I.; Kwok, R.; Fahnestock, M. Interferometric estimation of three-dimensional ice-flow using ascending and descending passes. IEEE Trans. Geosci. Remote Sens. 1998, 36, 25–37. [Google Scholar] [CrossRef]
- Mohr, J.J.; Reeh, N.; Madsen, S.N. Three-dimensional glacial flow and surface elevation measured with radar interferometry. Nature 1998, 391, 273–276. [Google Scholar] [CrossRef]
- Cascini, L.; Fornaro, G.; Peduto, D. Advanced low and full-resolution DInSAR map generation for slow-moving landslide analysis at different scales. Eng. Geol. 2010, 112, 29–42. [Google Scholar] [CrossRef]
- Bos, A.G.; Usai, S.; Spakman, W. A joint analysis of GPS motions and InSAR to infer the coseismic surface deformation of the Izmit, Turkey earthquake. Geophys. J. Int. 2004, 158, 849–863. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Cuenca, M.C.; Knöpfler, A.; Van Leijen, F.; Mayer, M.; Westerhaus, M.; Hanssen, R.; Heck, B. Estimation of small surface displacements in the Upper Rhine Graben area from a combined analysis of PS-InSAR, levelling and GNSS data. Geophys. J. Int. 2015, 203, 614–631. [Google Scholar] [CrossRef]
- Michel, R.; Avouac, J.-P.; Taboury, J.; Michel, R. Measuring ground displacements from SAR amplitude images: Application to the Landers Earthquake. Geophys. Res. Lett. 1999, 26, 875–878. [Google Scholar] [CrossRef]
- Michel, R.; Avouac, J.-P.; Taboury, J. Measuring near field coseismic displacements from SAR images: Application to the Landers Earthquake. Geophys. Res. Lett. 1999, 26, 3017–3020. [Google Scholar] [CrossRef]
- Bechor, N.B.D.; Zebker, H.A. Measuring two-dimensional movements using a single InSAR pair. Geophys. Res. Lett. 2006, 33, 1–5. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Hanssen, R.; van Thienen-Visser, K.; Muntendam-Bos, A. On the effect of horizontal deformation on InSAR subsidence estimates. In Proceedings of the Fringe Workshop, ESRIN, Frascati, Italy, 30 November–4 December 2009. [Google Scholar]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Manzo, M.; Ricciardi, G.; Casu, F.; Ventura, G.; Zeni, G.; Borgström, S.; Berardino, P.; Del Gaudio, C.; Lanari, R. Surface deformation analysis in the Ischia Island (Italy) based on spaceborne radar interferometry. J. Volcanol. Geotherm. Res. 2006, 151, 399–416. [Google Scholar] [CrossRef]
- Fuhrmann, T.; Garthwaite, M.C. Resolving three-dimensional surface motion with InSAR: Constraints from multi-geometry data fusion. Remote Sens. 2019, 11, 241. [Google Scholar] [CrossRef]
- Mogi, K. Relations between the eruptions of various volcanoes and the deformations of the ground surfaces around them. Earthq. Res. Inst. 1958, 36, 99–134. [Google Scholar]
- Aggregated Gas Storage Inventory (AGSI). Available online: https://agsi.gie.eu/#/ (accessed on 5 December 2019).
- Liu, W.; Völkner, E.; Minkley, W.; Popp, T. F+E Endlagerung: Zusammenstellung der Materialparameter für THM-Modellberechnungen, Ergebnisse aus dem Vorhaben KOSINA; Bundesanstalt für Geowissenschaften und Rohstoffe: Hannover, Germany, 2017. [Google Scholar]
- Shamshiri, R.; Nahavandchi, H.; Motagh, M.; Hooper, A. Efficient ground surface displacement monitoring using sentinel-1 data: Integrating Distributed Scatterers (DS) identified using two-sample t-test with Persistent Scatterers (PS). Remote Sens. 2018, 10, 794. [Google Scholar] [CrossRef]
- Pepe, A.; Yang, Y.; Manzo, M.; Lanari, R. Improved EMCF-SBAS processing chain based on advanced techniques for the noise-filtering and selection of small baseline multi-look DInSAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4394–4417. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.X. Robust estimators for multipass SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2015, 54, 968–980. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Martins, J.E.; Van Leijen, F.; Hanssen, R.F. Phase estimation for distributed scatterers in InSAR stacks using integer least squares estimation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5671–5687. [Google Scholar] [CrossRef]
- Lin, K.-F.; Perissin, D. Identification of statistically homogeneous pixels based on one-sample test. Remote Sens. 2017, 9, 37. [Google Scholar] [CrossRef]
- Verde, S.; Reale, D.; Pauciullo, A.; Fornaro, G. Improved small baseline processing by means of CAESAR eigen-interferograms decomposition. ISPRS J. Photogramm. Remote Sens. 2018, 139, 1–13. [Google Scholar] [CrossRef]
- Ansari, H.; De Zan, F.; Bamler, R. Efficient phase estimation for interferogram stacks. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4109–4125. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; De Zan, F.; Rucci, A.; Tebaldini, S. Process for Filtering Interferograms Obtained from SAR Images Acquired on the Same Area. CA Patent Application 2,767,144, 13 January 2011. [Google Scholar]
- Guarnieri, A.M.; Tebaldini, S. On the exploitation of target statistics for SAR interferometry applications. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3436–3443. [Google Scholar] [CrossRef]
- Wackernagel, H. Multivariate Geostatistics, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 1–387. [Google Scholar]
- Samsonov, S.V.; D’Oreye, N. Multidimensional Small Baseline Subset (MSBAS) for two-dimensional deformation analysis: Case study Mexico City. Can. J. Remote Sens. 2017, 43, 318–329. [Google Scholar] [CrossRef]
- Morishita, Y.; Hanssen, R.F. Temporal decorrelation in L-, C-, and X-band satellite radar interferometry for pasture on drained peat soils. IEEE Trans. Geosci. Remote Sens. 2014, 53, 1096–1104. [Google Scholar] [CrossRef]
- Morishita, Y.; Hanssen, R.F. Deformation parameter estimation in low coherence areas using a multisatellite InSAR approach. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4275–4283. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iteration | Step | Sucla 1 | Scla 2 | Scn 3 | Model |
|---|---|---|---|---|---|
| 1 | Phase unwrapping | x | |||
| Estimation of scla | |||||
| Estimation of scn | x | ||||
| 2 | Phase unwrapping | x | x | x | w |
| Estimation of scla | x | w | |||
| Phase unwrapping | x | x | x | w | |
| Estimation of scla | x | w | |||
| Estimation of scn | x | uw | |||
| 3 | Phase unwrapping | x | x | x | uw |
| Estimation of scla | x | uw | |||
| Estimation of scn | x | uw | |||
| 4 | Phase unwrapping | x | x | x | uw |
| Estimation of scla | x | uw | |||
| Estimation of scn | x | x | uw | ||
| 5 | Phase unwrapping | x | x | x | uw |
| Estimation of scla | x | x | uw | ||
| Estimation of scn | x | x | uw |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Even, M.; Westerhaus, M.; Simon, V. Complex Surface Displacements above the Storage Cavern Field at Epe, NW-Germany, Observed by Multi-Temporal SAR-Interferometry. Remote Sens. 2020, 12, 3348. https://doi.org/10.3390/rs12203348
Even M, Westerhaus M, Simon V. Complex Surface Displacements above the Storage Cavern Field at Epe, NW-Germany, Observed by Multi-Temporal SAR-Interferometry. Remote Sensing. 2020; 12(20):3348. https://doi.org/10.3390/rs12203348
Chicago/Turabian StyleEven, Markus, Malte Westerhaus, and Verena Simon. 2020. "Complex Surface Displacements above the Storage Cavern Field at Epe, NW-Germany, Observed by Multi-Temporal SAR-Interferometry" Remote Sensing 12, no. 20: 3348. https://doi.org/10.3390/rs12203348
APA StyleEven, M., Westerhaus, M., & Simon, V. (2020). Complex Surface Displacements above the Storage Cavern Field at Epe, NW-Germany, Observed by Multi-Temporal SAR-Interferometry. Remote Sensing, 12(20), 3348. https://doi.org/10.3390/rs12203348