Burned Area Detection and Mapping: Intercomparison of Sentinel-1 and Sentinel-2 Based Algorithms over Tropical Africa

 , ,
, ,  ,
, 
Abstract
1. Introduction
2. Materials and Methods
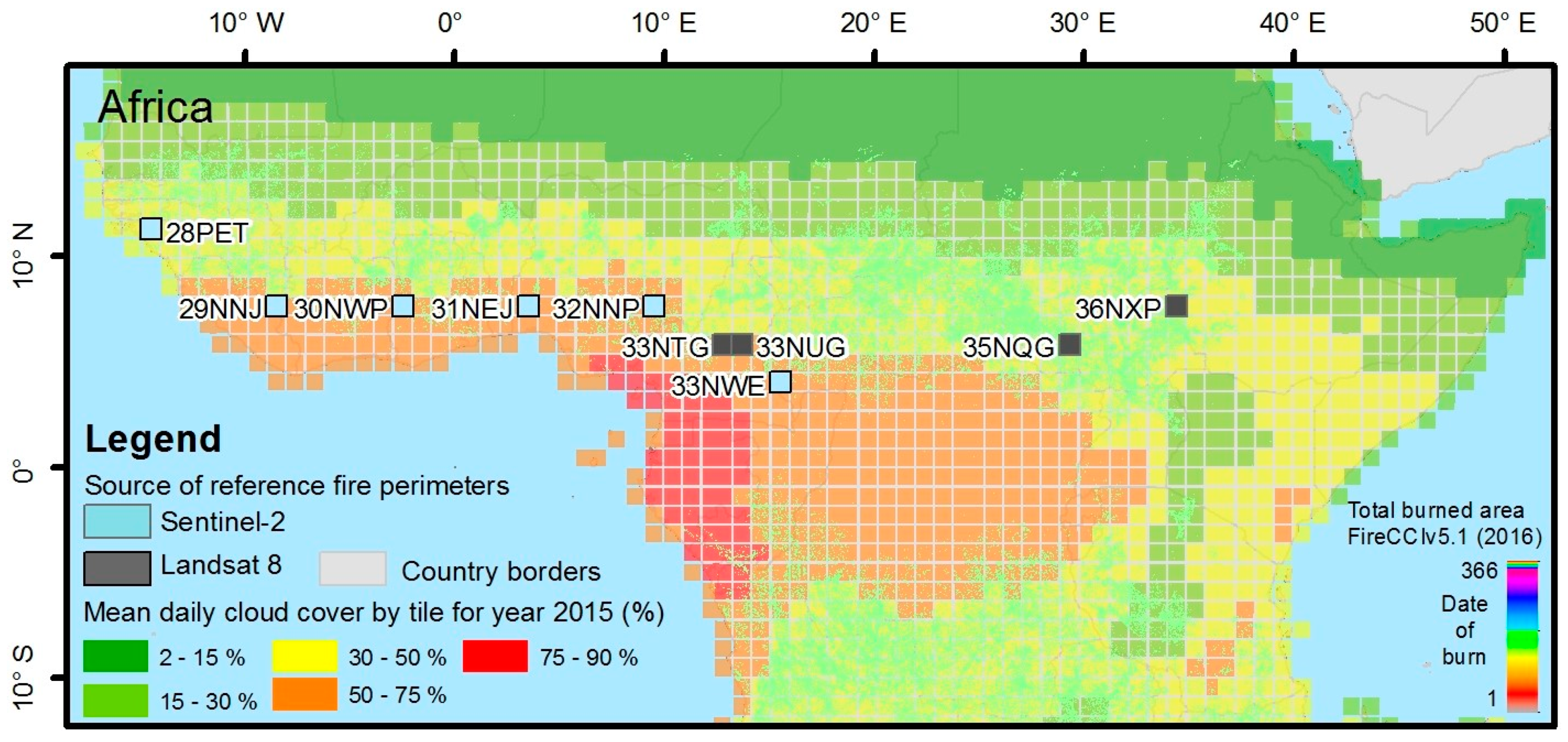
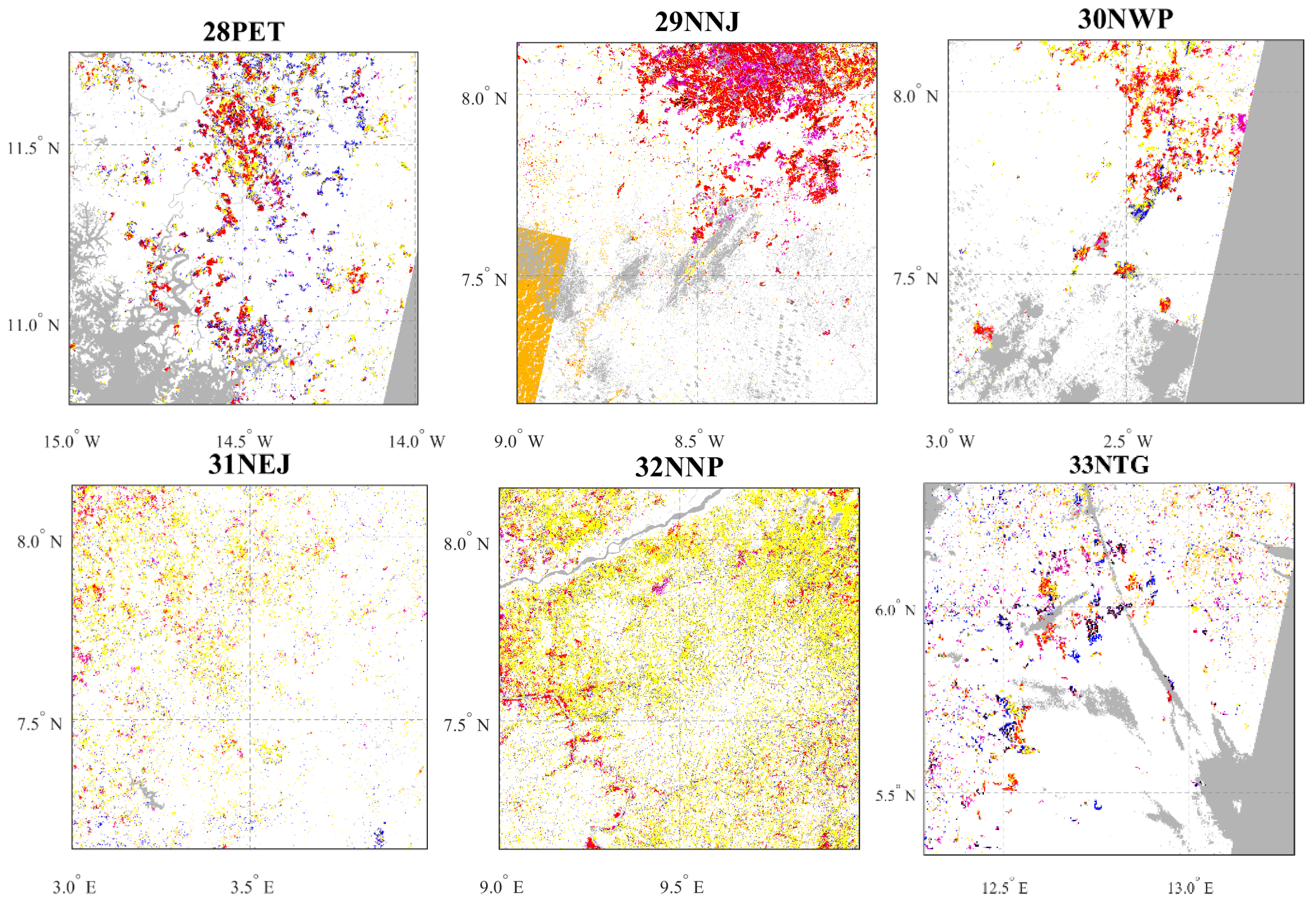
2.1. Reference Datasets
2.2. SFD Algorithms Description in Brief
2.2.1. Optical Time Series
2.2.2. SAR Coherence Time Series
2.2.3. SAR Backscatter Coefficient Time Series
2.3. Burned Area Detection Accuracy Assessment
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bojinski, S.; Verstraete, M.; Peterson, T.C.; Richter, C.; Simmons, A.; Zemp, M. The concept of essential climate variables in support of climate research, applications, and policy. Bull. Am. Meteorol. Soc. 2014, 95, 1431–1443. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.M.; Stroppiana, D.; Sousa, A.; Silva, J.; Pereira, J.M.; Boschetti, L.; Maggi, M.; Brivio, P.A.; Fraser, R.; et al. Vegetation burning in the year 2000: Global burned area estimates from spot vegetation data. J. Geophys. Res. 2004, 109, 1–22. [Google Scholar] [CrossRef]
- Plummer, S.; Arino, O.; Simon, M.; Steffen, W. Establishing a earth observation product service for the terrestrial carbon community: The globcarbon initiative. Mitig. Adapt. Strateg. Glob. Chang. 2006, 11, 97–111. [Google Scholar] [CrossRef]
- Roy, D.P.; Boschetti, L.; Justice, C.O.; Ju, J. The collection 5 modis burned area product—Global evaluation by comparison with the modis active fire product. Remote Sens. Environ. 2008, 112, 3690–3707. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.-M.; Defourny, P.; Leigh, R.; Pekel, J.-F.; Bogaert, E.; Bartholome, E. A new, global, multi-annual (2000–2007) burnt area product at 1 km resolution. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the modis sensor. Remote Sens. Environ. 2009, 113, 408–420. [Google Scholar] [CrossRef]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from envisat-meris and modis active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Chuvieco, E.; Yue, C.; Heil, A.; Mouillot, F.; Alonso-Canas, I.; Padilla, M.; Pereira, J.M.; Oom, D.; Tansey, K. A new global burned area product for climate assessment of fire impacts. Glob. Ecol. Biogeogr. 2016, 25, 619–629. [Google Scholar] [CrossRef]
- Chuvieco, E.; Lizundia-Loiola, J.; Pettinari, M.L.; Ramo, R.; Padilla, M.; Mouillot, F.; Laurent, P.; Storm, T.; Heil, A.; Plummer, S. Generation and analysis of a new global burned area product based on modis 250 m reflectance bands and thermal anomalies. Earth Syst. Sci. Data Discuss. 2018, 10, 2015–2031. [Google Scholar] [CrossRef]
- Giglio, L.; Boschetti, L.; Roy, D.P.; Humber, M.L.; Justice, C.O. The collection 6 modis burned area mapping algorithm and product. Remote Sens. Environ. 2018, 217, 72–85. [Google Scholar] [CrossRef]
- Padilla, M.; Stehman, S.V.; Hantson, S.; Oliva, P.; Alonso-Canas, I.; Bradley, A.; Tansey, K.; Mota, B.; Pereira, J.M.; Chuvieco, E. Comparing the accuracies of remote sensing global burned area products using stratified random sampling and estimation. Remote Sens. Environ. 2015, 160, 114–121. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.P.; Giglio, L.; Huang, H.; Zubkova, M.; Humber, M.L. Global validation of the collection 6 modis burned area product. Remote Sens. Environ. 2019, 235, 111490. [Google Scholar] [CrossRef]
- Mouillot, F.; Schultz, M.G.; Yue, C.; Cadule, P.; Tansey, K.; Ciais, P.; Chuvieco, E. Ten years of global burned area products from spaceborne remote sensing—A review: Analysis of user needs and recommendations for future developments. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 64–79. [Google Scholar] [CrossRef]
- Randerson, J.T.; Chen, Y.; Werf, G.R.; Rogers, B.M.; Morton, D.C. Global burned area and biomass burning emissions from small fires. J. Geophys. Res. Biogeosci. 2012, 117. [Google Scholar] [CrossRef]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a sentinel-2 burned area algorithm: Generation of a small fire database for sub-saharan africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Van der Werf, G.R.; Randerson, J.T.; Giglio, L.; van Leeuwen, T.T.; Chen, Y.; Rogers, B.M.; Mu, M.; van Marle, M.J.E.; Morton, D.C.; Collatz, G.J.; et al. Global fire emissions estimates during 1997–2016. Earth Syst. Sci. Data 2017, 9, 697–720. [Google Scholar] [CrossRef]
- Brennan, J.; Gómez-Dans, J.; Disney, M.; Lewis, P. Theoretical uncertainties for global satellite-derived burned area estimat. Biogeosceinces 2019, 16, 3147–3164. [Google Scholar] [CrossRef]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanase, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Boschetti, L.; Brivio, P.A. A method for extracting burned areas from landsat tm/etm+ images by soft aggregation of multiple spectral indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Collett, L.J. Development of an automated method for mapping fire history captured in landsat tm and etm+ time series across queensland, Australia. Remote Sens. Environ. 2014, 148, 206–221. [Google Scholar] [CrossRef]
- Stroppiana, D.; Azar, R.; Calò, F.; Pepe, A.; Imperatore, P.; Boschetti, M.; Silva, J.M.N.; Brivio, P.A.; Lanari, R. Integration of optical and sar data for burned area mapping in mediterranean regions. Remote Sens. 2015, 7, 1320–1345. [Google Scholar] [CrossRef]
- Hawbaker, T.J.; Vanderhoof, M.K.; Beal, Y.-J.; Takacs, J.D.; Schmidt, G.L.; Falgout, J.T.; Williams, B.; Fairaux, N.M.; Caldwell, M.K.; Picotte, J.J.; et al. Mapping burned areas using dense time-series of landsat data. Remote Sens. Environ. 2017, 198, 504–522. [Google Scholar] [CrossRef]
- Long, T.; Zhang, Z.; He, G.; Jiao, W.; Tang, C.; Wu, B.; Zhang, X.; Wang, G.; Yin, R. 30 m resolution global annual burned area mapping based on landsat images and google earth engine. Remote Sens. 2019, 11, 489. [Google Scholar] [CrossRef]
- Lasaponara, R.; Tucci, B. Identification of burned areas and severity using sar sentinel-1. IEEE Geosci. Remote Sens. Lett. 2019, 16, 917–921. [Google Scholar] [CrossRef]
- Engelbrecht, J.; Theron, A.; Vhengani, L.; Ke, J. A simple normalized difference approach to burnt area mapping using multi-polarisation c-band sar. Remote Sens. 2017, 9, 764. [Google Scholar] [CrossRef]
- Verhegghen, A.; Eva, H.; Ceccherini, G.; Achard, F.; Gond, V.; Gourlet-Fleury, S.; Cerutti, P.O. The potential of sentinel satellites for burnt area mapping and monitoring in the congo basin forests. Remote Sens. 2016, 8, 986. [Google Scholar] [CrossRef]
- Mathieu, R.; Main, R.; Roy, D.; Naidoo, L.; Yang, H. Detection of burned areas in southern african savannahs using time series of c-band sentinel-1 data. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 5337–5339. [Google Scholar]
- Roy, D.P.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.H.; Li, Z. Landsat-8 and sentinel-2 burned area mapping—A combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Stavrakoudis, D.; Katagis, T.; Minakou, C.; Gitas, I.Z. Towards a Fully Automatic Processing Chain for Operationally Mapping Burned Areas Countrywide Exploiting Sentinel-2 Imagery; SPIE: Bellingham, WA, USA, 2019. [Google Scholar]
- Filipponi, F. Exploitation of sentinel-2 time series to map burned areas at the national level: A case study on the 2017 italy wildfires. Remote Sens. 2019, 11, 622. [Google Scholar] [CrossRef]
- Hollmann, R.; Merchant, C.J.; Saunders, R.; Downy, C.; Buchwitz, M.; Cazenave, A.; Chuvieco, E.; Defourny, P.; de Leeuw, G.; Forsberg, R.; et al. The esa climate change initiative: Satellite data records for essential climate variables. Bull. Am. Meteorol. Soc. 2013, 94, 1541–1552. [Google Scholar] [CrossRef]
- Plummer, S.; Lecomte, P.; Doherty, M. The esa climate change initiative (cci): A european contribution to the generation of the global climate observing system. Remote Sens. Environ. 2017, 203, 2–8. [Google Scholar] [CrossRef]
- Giglio, L.; Randerson, J.T.; Werf, G.R. Analysis of daily, monthly, and annual burned area using the fourth generation global fire emissions database (gfed). J. Geophys. Res. Biogeosci. 2013, 118, 317–328. [Google Scholar] [CrossRef]
- Lohberger, S.; Stängel, M.; Atwood, E.C.; Siegert, F. Spatial evaluation of indonesia’s 2015 fire-affected area and estimated carbon emissions using sentinel-1. Glob. Chang. Biol. 2017. [Google Scholar] [CrossRef] [PubMed]
- Belenguer-Plomer, M.A.; Tanase, M.A.; Fernandez-Carrillo, A.; Chuvieco, E. Burned area detection and mapping using sentinel-1 backscatter coefficient and thermal anomalies. Remote Sens. Environ. 2019, 233, 111345. [Google Scholar] [CrossRef]
- Fernandez-Carrillo, A.; Belenguer-Plomer, M.A.; Chuvieco, E.; Tanase, M.A. Effects of Sample Size on Burned Areas Accuracy Estimates in the Amazon Basin; SPIE: Bellingham, WA, USA, 2018. [Google Scholar]
- Melchiorre, A.; Boschetti, L. Global analysis of burned area persistence time with modis data. Remote Sens. 2018, 10, 750. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Pedregosa, F.V.G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; Vanderplas, J.; et al. Scikit-learn: Machine learning in python. J. Mach. Learn. 2011, 12, 2825–2830. [Google Scholar]
- Key, C.H.; Benson, N.C. Remote Sensing Measure of Severity: The Normalized Burn Ratio, Firemon Landscape Assessment (La) V4, Sampling and Analysis Methods; USFS Rocky Mountain Research Station: Fort Collins, CO, USA, 2004.
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2cor for Sentinel-2; SPIE: Bellingham, WA, USA, 2017. [Google Scholar]
- Bastarrika, A.; Alvarado, M.; Artano, K.; Martinez, M.P.; Mesanza, A.; Torre, L.; Ramo, R.; Chuvieco, E. Bams: A tool for supervised burned area mapping using landsat data. Remote Sens. 2014, 6, 12360–12380. [Google Scholar] [CrossRef]
- Reed, I.S.; Yu, X. Adaptive multiple-band cfar detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Boschetti, L.; Flasse, S.P.; Brivio, P.A. Analysis of the conflict between omission and commission in low spatial resolution dichotomic thematic products: The pareto boundary. Remote Sens. Environ. 2004, 91, 280–292. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.; Justice, C.O. International Global Burned Area Satellite Product Validation Protocol. Part I—Production and Standardization of Validation Reference Data; Committee on Earth Observation Satellites: New York, NY, USA, 2009. [Google Scholar]
- Roy, D.P.; Boschetti, L. Southern africa validation of the modis, L3JRC, and globcarbon burned-area products. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1032–1044. [Google Scholar] [CrossRef]
- Boschetti, L.; Stehman, S.V.; Roy, D.P. A stratified random sampling design in space and time for regional to global scale burned area product validation. Remote Sens. Environ. 2016, 186, 465–478. [Google Scholar] [CrossRef] [PubMed]
- Chuvieco, E.; Opazo, S.; Sione, W.; Del Valle, H.; Anaya, J.; Di Bella, C.; Cruz, I.; Manzo, L.; López, G.; Mari, N.; et al. Global burned land estimation in latin america using modis composite data. Ecol. Appl. 2008, 18, 64–79. [Google Scholar] [CrossRef] [PubMed]
- Padilla, M.; Stehman, S.V.; Chuvieco, E. Validation of the 2008 modis-mcd45 global burned area product using stratified random sampling. Remote Sens. Environ. 2014, 144, 187–196. [Google Scholar] [CrossRef]
- Padilla, M.; Olofsson, P.; Stephen, V.S.; Tansey, K.; Chuvieco, E. Stratification and sample allocation for reference burned area data. Remote Sens. Environ. 2017, 203, 240–255. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Kirches, G.; Brockmann, C.; Boettcher, M.; Peters, M.; Bontemps, S.; Lamarche, C.; Schlerf, M.; Santoro, M.; Defourny, P. Land Cover CCI—Product User Guide—Version 2.4; ESA Public Document CCI-LC-PUG; European Union: Brussels, Belgium, 2014; Volume 4. [Google Scholar]
- Padilla, M.; Wheeler, J.; Tansey, K. Esa Climate Change Initiative—Fire_cci D4.1.1 Product Validation Report (PVR); Universidad de Alcala: Madrid, Spain, 2018; Available online: https://www.esa-fire-cci.org/Documents (accessed on 15 December 2019).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MGRS | Main Land Cover (%) | Analysed | Total | No. of Patches | |||
|---|---|---|---|---|---|---|---|
| Tile | Crops | Grasslands/Shrubs | Forests | Fire Period (dd.mm.yyyy) | Burned Area (km2) | Small (<25 ha) | Large (>25 ha) |
| 28PETS | 18 | 14 | 54 | 11.01.2016–11.03.2016 | 1205.6 | 2717 | 525 |
| 29NNJS | 57 | 24 | 18 | 02.01.2016–02.03.2016 | 1139.4 | 9736 | 278 |
| 30NWPS | 58 | 13 | 28 | 27.12.2015–16.01.2016 | 543.0 | 2469 | 182 |
| 31NEJS | 61 | 26 | 10 | 18.12.2015–07.01.2016 | 909.4 | 24957 | 544 |
| 32NNPS | 50 | 32 | 16 | 22.12.2015–10.02.2016 | 3609.1 | 37868 | 1144 |
| 33NTGL | 0 | 10 | 89 | 15.01.2016–16.02.2016 | 456.0 | 4104 | 274 |
| 33NUGL | 0 | 28 | 72 | 22.10.2016–25.12.2016 | 271.4 | 4255 | 193 |
| 33NWES | 2 | 10 | 87 | 02.01.2016–22.01.2016 | 859.5 | 7212 | 674 |
| 35NQGL | 0 | 0 | 99 | 01.11.2016–19.12.2016 | 3529.1 | 4538 | 658 |
| 36NXPL | 5 | 53 | 42 | 09.09.2016–12.11.2016 | 11.6 | 41 | 12 |
| All | 25.1 | 21 | 51.5 | - | 12534.1 | 97897 | 4484 |
| Product | Reference | Total | |
|---|---|---|---|
| Burned | Unburned | ||
| Burned | e11 | e12 | e1+ |
| Unburned | e21 | e22 | e2+ |
| Total | e+1 | e+2 | |
| Algorithm | Detected Area (Rounded) with Respect to Reference (in Parenthesis) by Land Cover Classes (km2) | Accuracy Metrics (Tile Level) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Total | Crops | Grasslands | Shrubs | Tropical Forests | OE | CE | DC | ||
| Ots | 28PETS | 795 (1206) | 43 (64) | 3 (4) | 53 (84) | 679 (1029) | 0.37 | 0.03 | 0.76 |
| 29NNJS | 1753 (1139) | 923 (696) | 65 (13) | 266 (234) | 487 (194) | 0.09 | 0.33 | 0.77 | |
| 30NWPS | 575 (543) | 133 (116) | 0 (0) | 80 (87) | 360 (340) | 0.16 | 0.04 | 0.89 | |
| 31NEJS | 867 (909) | 427 (454) | 5 (5) | 268 (280) | 165 (168) | 0.17 | 0.12 | 0.85 | |
| 32NNPS | 3430 (3609) | 1351 (1434) | 25 (27) | 1281 (1347) | 763 (791) | 0.14 | 0.09 | 0.89 | |
| 33NTGL | 442 (456) | 0 (0) | 0 (0) | 74 (83) | 366 (372) | 0.5 | 0.43 | 0.53 | |
| 33NUGL | 19 (271) | 0 (2) | 0 (0) | 3 (66) | 16 (202) | 0.98 | 0.51 | 0.04 | |
| 33NWES | 834 (860) | 19 (22) | 12 (13) | 122 (130) | 681 (694) | 0.22 | 0.03 | 0.86 | |
| 35NQGL | 3901 (3529) | 0 (0) | 0 (0) | 17 (13) | 3880 (3514) | 0.61 | 0.64 | 0.37 | |
| 36NXPL | 216 (12) | 4 (1) | 0 (0) | 92 (10) | 118 (0) | 0.57 | 0.93 | 0.12 | |
| All tiles | 12831 (12534) | 2901 (2789) | 109 (63) | 2256 (2335) | 7516 (7304) | 0.33 | 0.31 | 0.68 | |
| RtsB | 28PETS | 426 (1206) | 16 (64) | 1 (4) | 17 (84) | 379 (1029) | 0.71 | 0.16 | 0.44 |
| 29NNJS | 935 (1139) | 574 (696) | 10 (13) | 195 (234) | 156 (194) | 0.35 | 0.19 | 0.72 | |
| 30NWPS | 1707 (543) | 723 (116) | 0 (0) | 204 (87) | 780 (340) | 0.5 | 0.52 | 0.49 | |
| 31NEJS | 262 (909) | 123 (454) | 1 (5) | 82 (280) | 57 (168) | 0.89 | 0.63 | 0.16 | |
| 32NNPS | 1090 (3609) | 408 (1434) | 8 (27) | 412 (1347) | 251 (791) | 0.8 | 0.32 | 0.31 | |
| 33NTGL | 343 (456) | 0 (0) | 0 (0) | 63 (83) | 279 (372) | 0.61 | 0.43 | 0.46 | |
| 33NUGL | 335 (271) | 3 (2) | 0 (0) | 75 (66) | 257 (202) | 0.52 | 0.41 | 0.53 | |
| 33NWES | 726 (860) | 13 (22) | 8 (13) | 104 (130) | 602 (694) | 0.47 | 0.28 | 0.61 | |
| 35NQGL | 2235 (3529) | 1 (0) | 0 (0) | 8 (13) | 2225 (3514) | 0.63 | 0.41 | 0.46 | |
| 36NXPL | 101 (12) | 3 (1) | 0 (0) | 56 (10) | 42 (0) | 0.18 | 0.74 | 0.39 | |
| All tiles | 8161 (12534) | 1864 (2789) | 29 (63) | 1215 (2335) | 5026 (7304) | 0.66 | 0.36 | 0.45 | |
| RtsC | 28PETS | 310 (1206) | 12 (64) | 1 (4) | 34 (84) | 242 (1029) | 0.87 | 0.47 | 0.2 |
| 29NNJS | 143 (1139) | 78 (696) | 3 (13) | 29 (234) | 32 (194) | 0.91 | 0.26 | 0.15 | |
| 30NWPS | 344 (543) | 27 (116) | 0 (0) | 37 (87) | 279 (340) | 0.76 | 0.48 | 0.33 | |
| 31NEJS | 244 (909) | 127 (454) | 1 (5) | 74 (280) | 41 (168) | 0.98 | 0.91 | 0.04 | |
| 32NNPS | 3933 (3609) | 2230 (1434) | 31 (27) | 1202 (1347) | 466 (791) | 0.58 | 0.61 | 0.41 | |
| 33NTGL | 537 (456) | 0 (0) | 0 (0) | 99 (83) | 437 (372) | 0.72 | 0.85 | 0.19 | |
| 33NUGL | 19 (271) | 0 (2) | 0 (0) | 5 (66) | 14 (202) | 0.96 | 0.19 | 0.08 | |
| 33NWES | 172 (860) | 3 (22) | 2 (13) | 24 (130) | 144 (694) | 0.93 | 0.54 | 0.11 | |
| 35NQGL | 2321 (3529) | 0 (0) | 0 (0) | 12 (13) | 2308 (3514) | 0.14 | 0.38 | 0.72 | |
| 36NXPL | 17 (12) | 0 (1) | 1 (0) | 9 (10) | 7 (0) | 0.93 | 0.62 | 0.12 | |
| All tiles | 8040 (12534) | 2477 (2789) | 38 (63) | 1524 (2335) | 3969 (7304) | 0.67 | 0.55 | 0.38 | |
| Algorithm | Ots | RtsB | RtsC | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Land Cover (%) | OE | CE | DC | OE | CE | DC | OE | CE | DC |
| Crops | 0.15 | 0.16 | 0.85 | 0.69 | 0.30 | 0.43 | 0.72 | 0.69 | 0.29 |
| Grasslands | 0.17 | 0.50 | 0.62 | 0.72 | 0.36 | 0.39 | 0.77 | 0.61 | 0.29 |
| Shrubs | 0.19 | 0.13 | 0.84 | 0.71 | 0.33 | 0.41 | 0.72 | 0.56 | 0.34 |
| Tropical forest | 0.44 | 0.42 | 0.57 | 0.63 | 0.38 | 0.46 | 0.61 | 0.46 | 0.45 |
| Tile | 28PET | 29NNJ | 30NWP | 31NEJ | 32NNP |
|---|---|---|---|---|---|
| NB S-1 & S-2 | 98.6 | 91.4 | 95.7 | 98.0 | 93.7 |
| BA Sl-1 & S-2 | 23.3 | 64.7 | 37.3 | 6.7 | 7.1 |
| CE S-1 & S-2 | 0.2 | 2.2 | 0.9 | 0.4 | 0.7 |
| OE S-1 & S-2 | 30.9 | 3.6 | 12.4 | 16.3 | 12.9 |
| Tile | 33NTG | 33NUG | 33NWE | 35NQG | 36NXP |
| NB S-1 & S-2 | 96.7 | 98.0 | 96.0 | 66.6 | 98.1 |
| BA Sl-1 & S-2 | 21.5 | 1.0 | 41.8 | 18.4 | 36.0 |
| CE S-1 & S-2 | 5.7 | 0.3 | 0.4 | 18.6 | 23.1 |
| OE S-1 & S-2 | 32.9 | 53.7 | 10.6 | 41.8 | 10.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanase, M.A.; Belenguer-Plomer, M.A.; Roteta, E.; Bastarrika, A.; Wheeler, J.; Fernández-Carrillo, Á.; Tansey, K.; Wiedemann, W.; Navratil, P.; Lohberger, S.; et al. Burned Area Detection and Mapping: Intercomparison of Sentinel-1 and Sentinel-2 Based Algorithms over Tropical Africa. Remote Sens. 2020, 12, 334. https://doi.org/10.3390/rs12020334
Tanase MA, Belenguer-Plomer MA, Roteta E, Bastarrika A, Wheeler J, Fernández-Carrillo Á, Tansey K, Wiedemann W, Navratil P, Lohberger S, et al. Burned Area Detection and Mapping: Intercomparison of Sentinel-1 and Sentinel-2 Based Algorithms over Tropical Africa. Remote Sensing. 2020; 12(2):334. https://doi.org/10.3390/rs12020334
Chicago/Turabian StyleTanase, Mihai A., Miguel A. Belenguer-Plomer, Ekhi Roteta, Aitor Bastarrika, James Wheeler, Ángel Fernández-Carrillo, Kevin Tansey, Werner Wiedemann, Peter Navratil, Sandra Lohberger, and et al. 2020. "Burned Area Detection and Mapping: Intercomparison of Sentinel-1 and Sentinel-2 Based Algorithms over Tropical Africa" Remote Sensing 12, no. 2: 334. https://doi.org/10.3390/rs12020334
APA StyleTanase, M. A., Belenguer-Plomer, M. A., Roteta, E., Bastarrika, A., Wheeler, J., Fernández-Carrillo, Á., Tansey, K., Wiedemann, W., Navratil, P., Lohberger, S., Siegert, F., & Chuvieco, E. (2020). Burned Area Detection and Mapping: Intercomparison of Sentinel-1 and Sentinel-2 Based Algorithms over Tropical Africa. Remote Sensing, 12(2), 334. https://doi.org/10.3390/rs12020334