Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC)

 , ,
, ,
Abstract
1. Introduction
- (a)
- The signal-to-noise ratio (SNR) determines how well layers can be detected. SNR depends on the composition of the probed atmosphere (amount of aerosol, moisture) and the lidar system [26]. Relatively high noise can create false signatures in the attenuated backscatter that may be mistaken for a physical layer boundary. As the signal returned to the detector from a homogeneous atmosphere decreases with increasing distance from the sensor (i.e., range), ALC with inherently lower power and/or higher noise associated with the lidar system provide particularly low SNR observations not only for reduced aerosol load but also during deep ABL convection. This increases the uncertainties in detection of ABL heights.
- (b)
- Some ALC have a large ‘blind zone’ or greater uncertainty in the very near range due to the incomplete optical overlap between the transmitter and receiver unit. This limits the detection of shallow layers within the ABL, which often occur with stable atmospheric stratification at night. Other ALC have a near-complete optical overlap, allowing shallow layers (< 100 m above ground level, agl) to be derived.
2. Materials and Methods
2.1. STRATfinder for High-SNR ALC
- The temporal variance field is calculated from 15 s data at block intervals and window length defined by the user (Table A1). Here, variance is calculated every 10 min over sliding windows of 1 h to capture the essential spectral information content. To avoid high signals associated with clouds introducing additional variability, a moving average with range (height) is calculated. Any instance exceeding a set threshold (Table A1) is excluded from the calculations. Subsequently, attenuated backscatter observations are detrended and a high-pass filter applied with a cut off to remove meso-scale variations [22]. Finally, variance is estimated using a fast Fourier transform function [22].
- To standardise the output, attenuated backscatter is block-averaged to a temporal resolution of 1 min and a range resolution of 30 m. Range is converted to height above ground level (agl) accounting for the beam tilt angle. A smooth field of attenuated backscatter is generated using gaussian blur and 2D anisotropic diffusion [22].
- Vertical gradients are calculated from the log10 of the smoothed attenuated backscatter.
- Two weights fields are estimated: (1) inverse of the vertical gradient field and (2) combined gradient and variance indicators. High weights are set to block the path where vertical gradients are positive or small in magnitude and variance is low.
- Several characteristic heights are specified by the user to define the limits constraining the search regions for ABLH and MLH. An auxiliary layer height (XLH) is tracked backwards in time from midnight to noon to assist MLH detection during the evening decay of the mixed layer.
- The Dijkstra algorithm [29] is applied to track MLH, XLH, and ABLH. The path minimises the cost function across a user-defined time window (Table A1). Individual paths are connected to determine MLH and ABLH for the whole 24 h period. ABLH detection relies on the weights specified by the gradient field, as does the tracking of XLH and MLH detection before the morning growth onset. To detect the MLH between the morning growth and midnight, the weights field combining gradient and variance characteristics is used. At the start of each layer search, the first vertical profile of weights is evaluated for local minima (with Nmin = number of local minima). If an ABLH estimate is already available from the previous day, the starting point for the ABLH search is set to the last height of this layer, or otherwise to the (Nmin∙0.75)th local minimum. Search for MLH and XLH starts at the height of the (Nmin∙0.25)th local minimum. For every consecutive search window, the end point of the layer detected in the prior window is used as the starting point. At times, no reasonable path is traceable to significant negative vertical gradients in attenuated backscatter. When this occurs, the whole search window is removed from final output by applying an overall threshold to the cost of a given path.
- The auxiliary layer XLH and the preliminary MLH are merged to give the final MLH estimate. If the difference between the first and maximum XLH is smaller than the minimum difference between XLH and MLH, MLH is set to XLH up from sunset. Otherwise, the two layers are connected from the point where they are in shortest distance to each other. Intermediate results of XLH (MLH) before (after) that connection point are discarded.
- If the variance exceeds a threshold (Table A1) for 75% of the profile below CBH, precipitation is considered to impede successful layer detection and tracking of both MLH and ABLH is interrupted.
2.2. CABAM for Low-SNR ALC
2.3. Quality Control
- Low MLH caused by precipitation: Although both methods aim to assess if precipitation is hindering MLH detection, results still include periods during or after rainfall affecting the ALC measurements leading to low MLH. For STRATfinder, MLH below the 15th percentile statistics by season (winter = DJF, spring = MAM, summer = JJA, and autumn = SON) and time relative to sunrise based on all available results (Section 3.1) are flagged if precipitation is detected within a 45 min window of the interval or if more than 2 h of a day are flagged to be severely affected by precipitation. Gaps of up to 2 h between these flagged periods are also flagged. For CABAM, days (sunrise until sunset) or nights (sunset until sunrise) with more than 3 h of precipitation inhibiting successful MLH detection are flagged completely.
- At times, the CABAM near-range module does not successfully discard some candidate layers below 200 m. STRATfinder search limits falsely allow a path near the overlap-related minimum detection limit to be followed. These false layer detections by either algorithm result in layers with hardly any variability in layer height below 300 m even during daytime when turbulent exchange clearly establishes a convective boundary layer above (as is evident from manual inspection of the attenuated backscatter). Such daytime conditions are flagged between March and October if more than 50% of the MLH results h later than 5 h after sunrise remain below 300 m or if MLH actually exceeds 450 m at some time between sunrise and solar noon, and MLH then falls again below 300 m before sunset.
- Both methods occasionally show MLH temporal inconsistencies (i.e., very unlikely changes in magnitude). If the MLH increase (decrease) at midnight is greater than 500 m, periods between midnight and sunrise (sunset and midnight) are flagged. Further, if MLH increases by more than 500 m 15 min−1 at any other time during the night, periods are flagged either up to a decrease by more than 500 m 15 min−1 or up to sunrise if no strong decrease occurs. If the MLH increases by more than 500 m 15 min−1 before 4 h after sunrise, the periods until 4 h after sunrise are flagged.
- The relation between CBH and MLH is used to assess potential false layer attribution by CABAM. If CBH indicates clouds are forming at the top of the ABL before 2 h prior to sunset and MLH is found more than 200 m below the CBH for a time window of at least 1 h, MLH is flagged as a likely underestimation.
- If no clear nocturnal boundary layer near the ground is detected, CABAM results during the night may represent the residual layer during spring and summer. If the minimum MLH in the three hours before sunrise is located above 900 m, MLH up to 3 h after sunrise is flagged. Or if MLH exceeds 2000 m within 5 h of sunrise, MLH greater than this height is flagged for the whole day.
2.4. Thermodynamic ABL Indicators from Profile Observations
2.5. Observations and Measurement Sites
3. Results
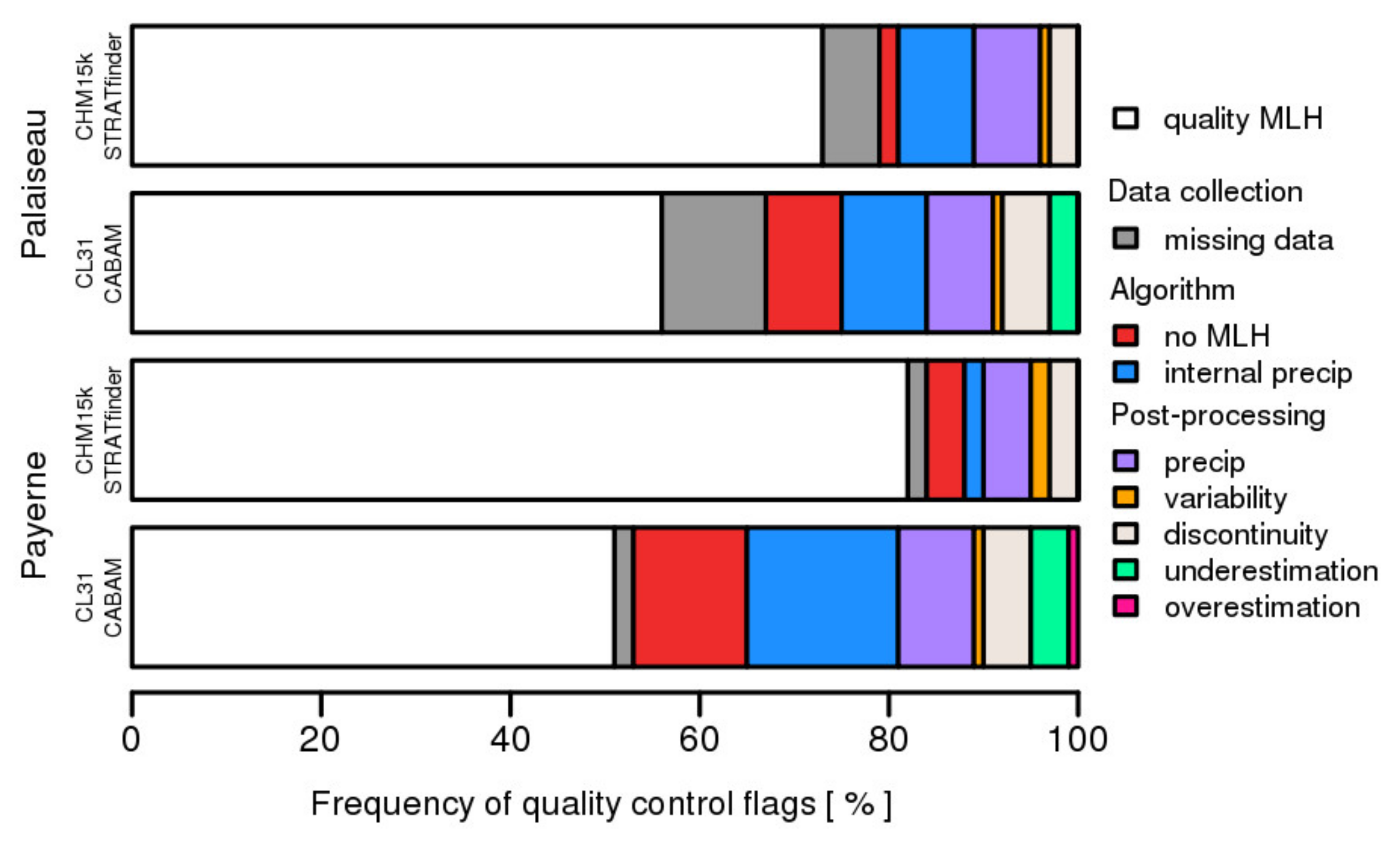
3.1. Detection Rates and Quality Control
3.2. Evaluation against Thermodynamic Boundary Layer Height
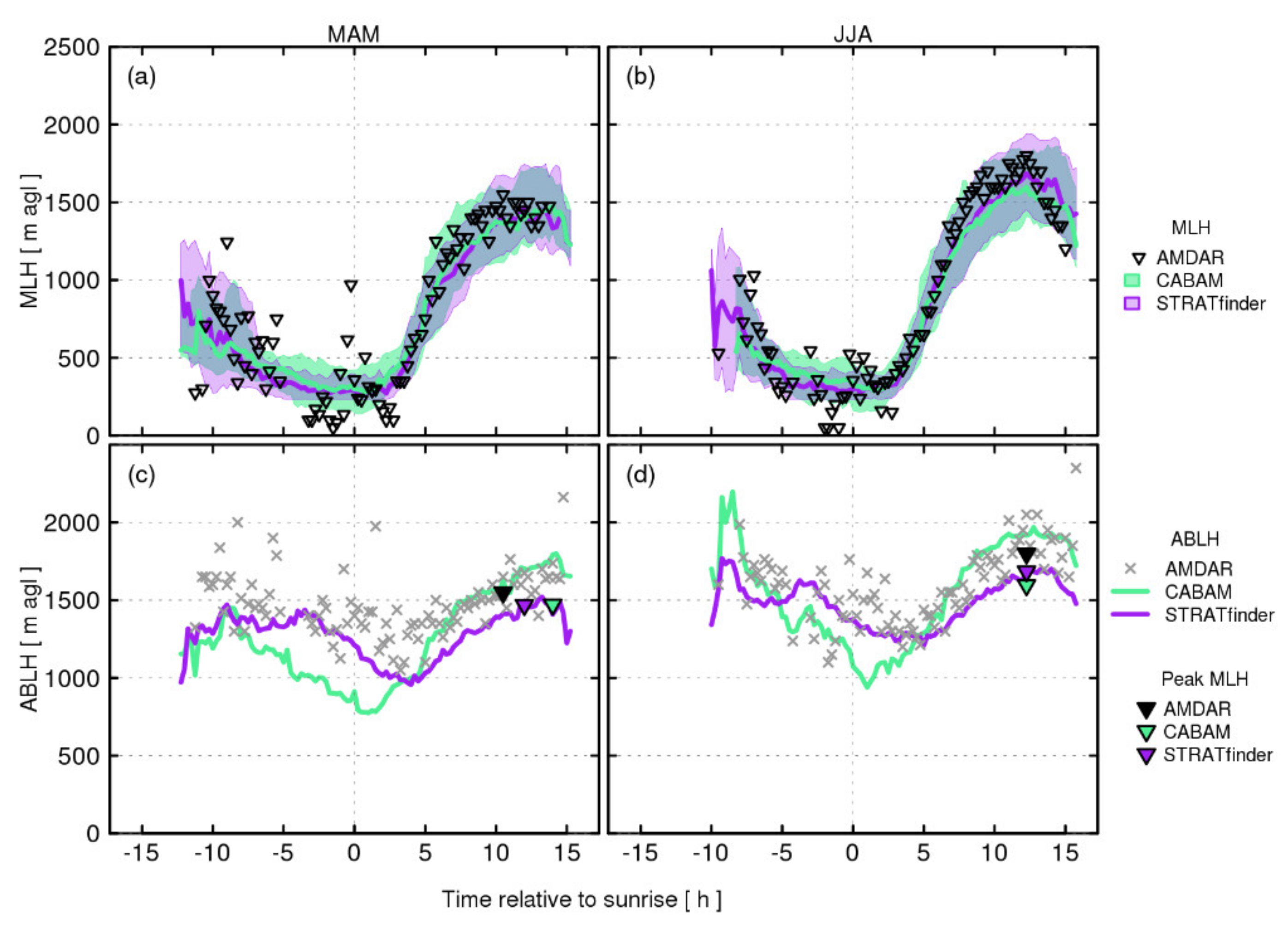
- While previous evaluations against radiosondes were limited to midday conditions (noon ascents), the current AMDAR assessment spans the whole day, including nocturnal periods (Figure 4).
- The mode of data collection for the temperature profile contributes to the uncertainty. While the absolute measurement accuracy of AMDAR data is less than for radiosondes [41], systematic temperature biases are not critical to the ABL layer height detection [34]. However, the vertical resolution of the temperature profiles is usually higher for radiosondes compared to AMDAR. Further, horizontal displacement is greater for airplane flight paths (~10 km km−1, ∆x ∆z−1) than radiosondes (~1 km km−1) [34], which cause changes in both vertical mixing and ABL height when there are variations in orography and/or land-cover [42]. Substantial spatial variations in ABL heights have been found in the Paris area during spring and summer [43].
- Uncertainty arises from thermodynamic retrieval of layer heights from AMDAR and radiosonde profiles. The parcel method and the bulk Richardson method can give different results (e.g., peak MLH at Payerne had MAE of 50–250 m [5]). By selecting only days when these two methods are in “good” agreement (difference < 250 m), Poltera et al. [22] likely removed more complex conditions that lead to a mismatch between aerosol-derived and radiosonde-based MLH estimates. Unfortunately, as the bulk Richardson method requires wind data that are very rarely reported in the AMDAR system, it is not applied here despite being considered better for estimating the convective boundary layer height [5].
- The auxiliary data used by STRAT+ to derive MLH may help reduce uncertainty in aerosol-based layer detection. Further, application to a high-power lidar [15] rather than an ALC likely decreases false layer detection.
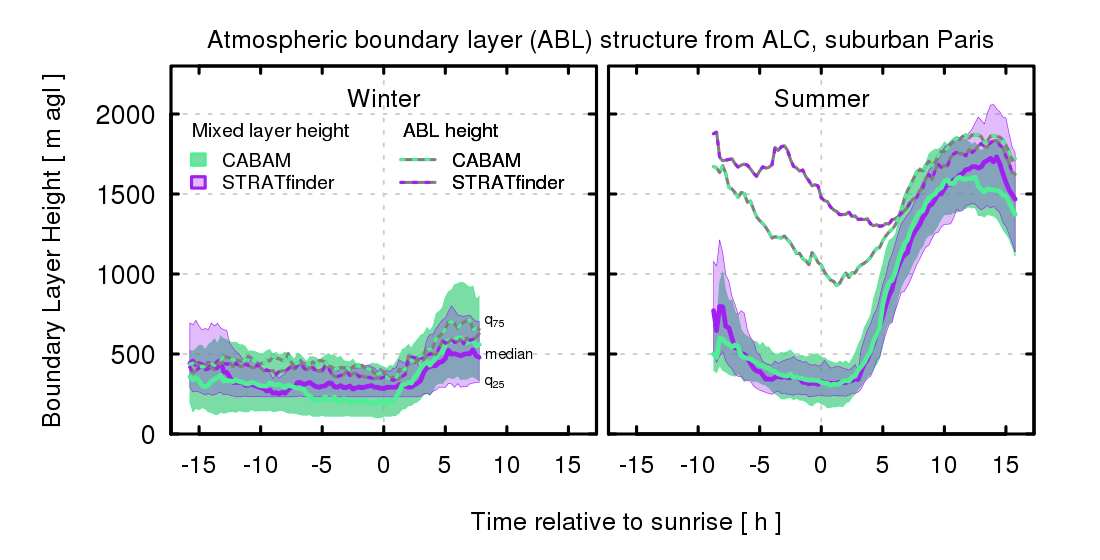
3.3. Average ABL Heights
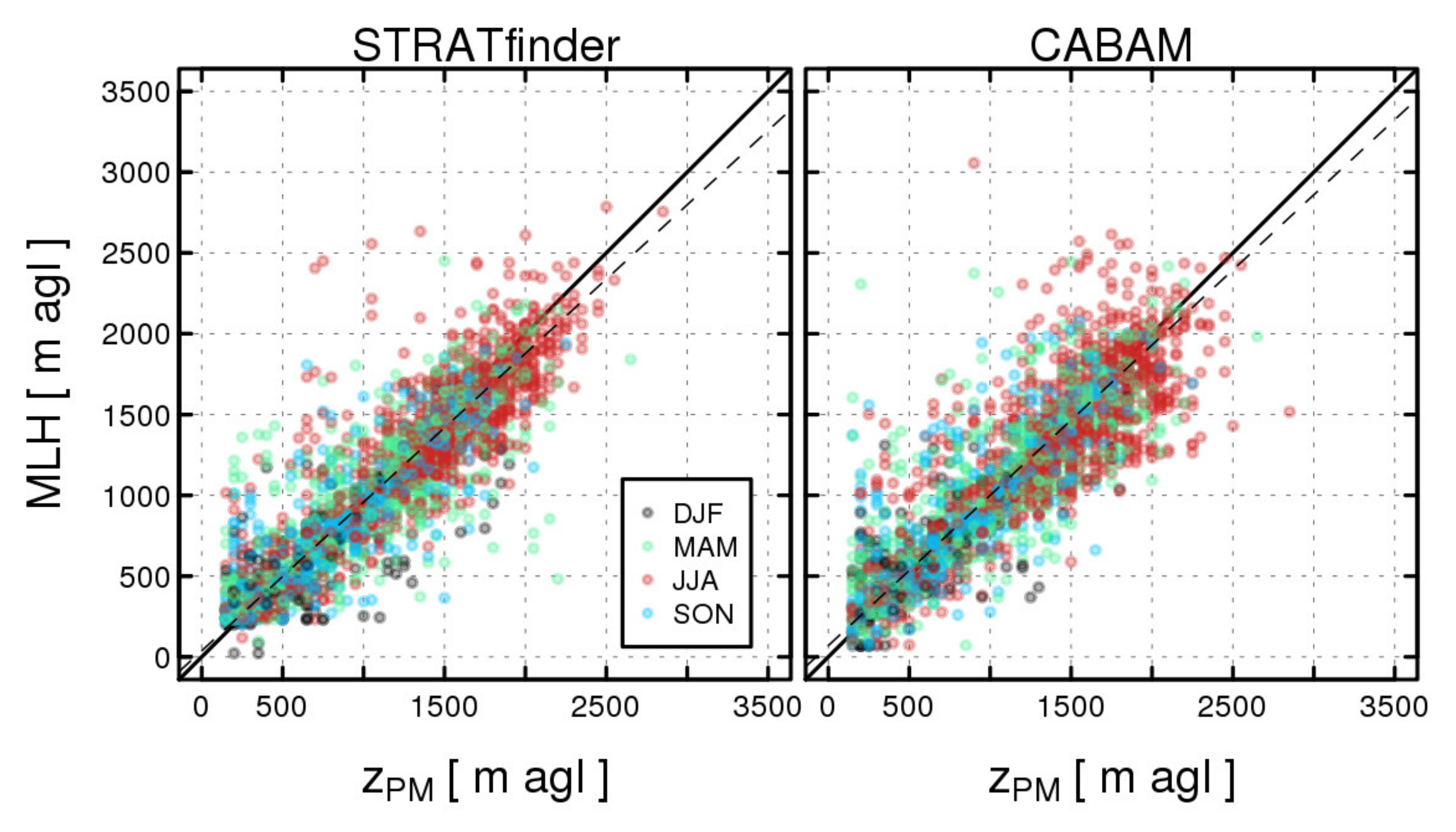
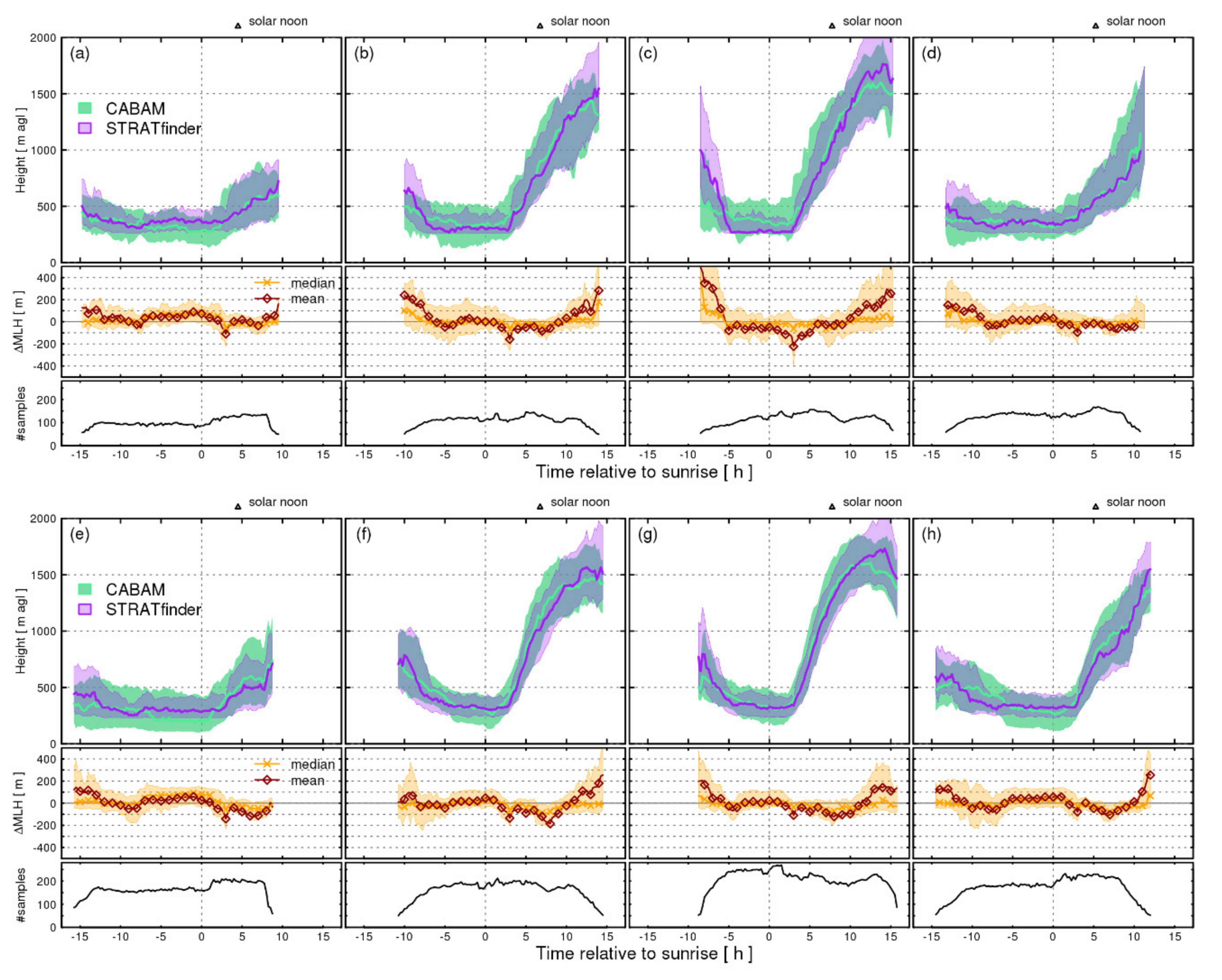
3.4. Direct Comparison of MLH from High-SNR and Low-SNR ALC
4. Discussion of Site and Sensor Specifics
- (1)
- Night: While the STRATfinder MLH search region has an upper limit set, the lower limit is defined by the optical overlap of the individual CHM15k sensor. CABAM can assign any height if there is no other layer below and the layer is temporally consistent. Nocturnal overestimation by CABAM (currently mostly excluded by post-processing quality control) could be reduced if absolute restrictions were implemented, such as for STRATfinder. However, performance in complex cases requires further evaluation. The STRATfinder upper search limit affects the nocturnal MLH distribution, as multiple significant gradients in attenuated backscatter may occur within the residual layer. As STRATfinder does not necessarily follow the layer closest to the ground but rather the stronger negative gradient, elevated layer boundaries within or at the top of the RL may be assigned instead of a weak MLH. Additionally, the instrument optical overlap function is demonstrated (Section 3.4, Figure 7) to impact the detection at very low layer heights. When interpreting MLH results from multiple sensors across a network, this effect must be considered.
- (2)
- Morning: As STRATfinder uses a pathfinding method, while CABAM connects layers via a decision tree, methodological differences affect their relative performance during morning growth of the mixed layer. CABAM’s rules decide if a layer above or one later in time should be appended to form a consistent MLH estimate. When the MLH rises quickly, the upward turbulent transport of aerosols and entrainment of residual layer air with potentially contrasting characteristics means layer boundaries may not increase in height steadily., MLH can rather suddenly connect to layers existing above and may even alternate up and down (e.g., [48]). While STRATfinder can follow a more complex path, CABAM decisions are simpler, being based on three growth limit values for short-, medium-, and long-distance layer connections (Appendix A). Where rapid, deep convection is common (e.g., Palaiseau), these values need to be set accordingly. Hence, different CABAM settings are used at the two sites in this study. The STRATfinder pathfinding upper boundary is derived from a series of user-defined settings (Section 2.1), including a nocturnal and daytime maximum and a specific growth rate when transitioning between those limits in the morning.
- (3)
- Daytime: Both methods require a physically possible daytime maximum ABLH to be specified (Appendix A). However, it has minimal impact on performance (unless set too low). During daytime deep convection, a low-SNR sensor is clearly inferior to high-SNR observations. False layers induced by noise may lead to both over- and under-estimation of peak MLH values, depending on the growth limit settings. The improved CABAM performance at Palaiseau with CL51 (cf. CL31) data illustrates this source of uncertainty. The new deep convection module generally improves CABAM performance for CL31 input at Palaiseau where fast growing mixed layers occur frequently during spring and summer. However, occasionally the residual layer may not be completely entrained into the mixed layer during morning growth, or aerosol layers may be advected horizontally without being mixed into the ABL. Such detached, elevated aerosol layers create a very complex ABL that makes MLH tracing even more challenging. On such days, the deep convection module leads to severe MLH overestimation that is not removed by the post-processing quality control. In mountainous Payerne, detached aerosol layers are commonly observed above the ABL [22], so the deep convection module would lead to frequent daytime overestimation and is hence not activated. In addition, activating the deep convection module for MLH detection in an area where the ABL is generally shallower than over Palaiseau [17,28] (e.g., London, UK, where CABAM was developed) could decrease daytime performance.
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Input parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Parameter Name | Description | Value Used in This Study |
|---|---|---|---|
| Calculation | min | Minimum height considered | 0 m agl |
| max | Maximum height considered | 4500 m agl | |
| Cloud | window | Window size to smooth attenuated backscatter when creating cloud mask before variance calculations | 11 time steps |
| threshold | Attenuated backscatter exceeding this value is excluded from variance calculations | 107 a.u. | |
| Instrument | threshold_overlap | Profile only considered above this limit of optical overlap function | 5% |
| MLHsettings | threshold_molecular | Threshold used to identify lowest height in attenuated backscatter profile where signal particle scattering is negligible. Used to define upper search region for ABLH. | 104.6 a.u. |
| dayMax | Maximum of ABLH search region during day | 4000 m agl | |
| dayMin | Minimum of ABLH search region during day | 0 m agl | |
| evening | Maximum of ABLH search region during evening | 2500 m agl | |
| nightMax | Maximum of MLH search region during night | 700 m agl | |
| nightMin | Maximum of MLH search region during night | 0 m agl | |
| growth_onset | Delay of growth onset relative to sunrise | 10800 s | |
| growth_rate | Growth rate considered up from onset to define maximum search region of MLH | 300 m h−1 | |
| jump | Maximum allowed vertical displacement between two adjacent paths tracked by pathfinding algorithm | 32.5 m | |
| threshold_gradient | Threshold to define regions of increased weights based on small or positive vertical gradients | −5 ∙ 10−4 a.u. | |
| threshold_log10variance | Threshold to define regions of increased weights based on low variance | 1010 | |
| Pathfinder | window | Period considered for each implementation of pathfinding algorithm | 1800 s |
| Variance | highpassfilter | Wavelength above with variance contributions are omitted | 1800 s |
| FFT_window | Time window for variance calculations | 3600 s | |
| FFT_sample | Time resolution for variance calculations | 600 s |
| Parameter Name | Description | Value Used in This Study | |
|---|---|---|---|
| Palaiseau | Payerne | ||
| climatological_limit | Maximum height considered | 4000 m agl | 4000 m agl |
| growthlimit_intervals | Intervals defining small, medium, and large distances allowed for vertical layer connection | 700, 1700, 2700 m | 500, 1200, 2000 m |
| threshold_beta | Threshold to detect signal strength for deep convection module | 3 ∙ 10−7 a.u. | 3 ∙ 10−7 a.u. |
| threshold_gradient | Consider negative gradient in attenuated backscatter significant if stronger than this threshold | −4.5 ∙ 10−10 a.u. | −4.5 ∙ 10−10 a.u. |
| threshold_noiseCBL | Evaluate layers above this height for deep convection module. If threshold_noiseCBL equal climatological_limit, deep convection module is not activated | 1000 m | 4000 m |
| threshold_rain | Threshold used to detect rain within profile of attenuated backscatter | 10−5 a.u. | 10−5 a.u. |
References
- Mittermaier, M.P. A Strategy for Verifying Near-Convection-Resolving Model Forecasts at Observing Sites. Weather Forecast. 2014, 29, 185–204. [Google Scholar] [CrossRef]
- Illingworth, A.J.; Cimini, D.; Haefele, A.; Haeffelin, M.; Hervo, M.; Kotthaus, S.; Löhnert, U.; Martinet, P.; Mattis, I.; O’Connor, E.J.; et al. How Can Existing Ground-Based Profiling Instruments Improve European Weather Forecasts? Bull. Am. Meteorol. Soc. 2019, 100, 605–619. [Google Scholar] [CrossRef]
- Cazorla, A.; Casquero-Vera, J.A.; Román, R.; Guerrero-Rascado, J.L.; Toledano, C.; Cachorro, V.E.; Orza, J.A.G.; Cancillo, M.L.; Serrano, A.; Titos, G.; et al. Near-real-time processing of a ceilometer network assisted with sun-photometer data: Monitoring a dust outbreak over the Iberian Peninsula. Atmos. Chem. Phys. 2017, 17, 11861–11876. [Google Scholar] [CrossRef]
- Collaud Coen, M.; Praz, C.; Haefele, A.; Ruffieux, D.; Kaufmann, P.; Calpini, B. Determination and climatology of the planetary boundary layer height above the Swiss plateau by in situ and remote sensing measurements as well as by the COSMO-2 model. Atmos. Chem. Phys. 2014, 14, 13205–13221. [Google Scholar] [CrossRef]
- Dang, R.; Yang, Y.; Hu, X.-M.; Wang, Z.; Zhang, S. A Review of Techniques for Diagnosing the Atmospheric Boundary Layer Height (ABLH) Using Aerosol Lidar Data. Remote Sens. 2019, 11, 1590. [Google Scholar] [CrossRef]
- Shi, Z.; Vu, T.; Kotthaus, S.; Harrison, R.M.; Grimmond, S.; Yue, S.; Zhu, T.; Lee, J.; Han, Y.; Demuzere, M.; et al. Introduction to the special issue “In-depth study of air pollution sources and processes within Beijing and its surrounding region (APHH-Beijing)”. Atmos. Chem. Phys. 2019, 19, 7519–7546. [Google Scholar] [CrossRef]
- Stirnberg, R.; Cermak, J.; Kotthaus, S.; Haeffelin, M.; Andersen, H.; Fuchs, J.; Kim, M.; Petit, J.; Favez, O. Meteorology-driven variability of air pollution ( PM1 ) revealed with explainable machine learning. Atmos. Chem. Phys. Discuss. 2020, 1–35. [Google Scholar] [CrossRef]
- Klein, A.; Ancellet, G.; Ravetta, F.; Thomas, J.L.; Pazmino, A. Characterizing the seasonal cycle and vertical structure of ozone in Paris, France using four years of ground based LIDAR measurements in the lowermost troposphere. Atmos. Environ. 2017, 167, 603–615. [Google Scholar] [CrossRef]
- Banks, R.F.; Tiana-Alsina, J.; Rocadenbosch, F.; Baldasano, J.M. Performance Evaluation of the Boundary-Layer Height from Lidar and the Weather Research and Forecasting Model at an Urban Coastal Site in the North-East Iberian Peninsula. Bound. -Layer Meteorol. 2015, 157, 265–292. [Google Scholar] [CrossRef]
- Ciais, P.; Dolman, A.J.; Bombelli, A.; Duren, R.; Peregon, A.; Rayner, P.J.; Miller, C.; Gobron, N.; Kinderman, G.; Marland, G.; et al. Current systematic carbon-cycle observations and the need for implementing a policy-relevant carbon observing system. Biogeosciences 2014, 11, 3547–3602. [Google Scholar] [CrossRef]
- Lauvaux, T.; Miles, N.L.; Deng, A.; Richardson, S.J.; Cambaliza, M.O.; Davis, K.J.; Gaudet, B.; Gurney, K.R.; Huang, J.; O’Keefe, D.; et al. High-resolution atmospheric inversion of urban CO2 emissions during the dormant season of the Indianapolis Flux Experiment (INFLUX). J. Geophys. Res. Atmos. 2016, 121, 5213–5236. [Google Scholar] [CrossRef] [PubMed]
- Geiß, A.; Wiegner, M.; Bonn, B.; Schäfer, K.; Forkel, R.; von Schneidemesser, E.; Münkel, C.; Chan, K.L.; Nothard, R. Mixing layer height as an indicator for urban air quality? Atmos. Meas. Tech. 2017, 10, 2969–2988. [Google Scholar] [CrossRef]
- de Bruine, M.; Apituley, A.; Donovan, D.P.; Klein Baltink, H.; de Haij, M.J. Pathfinder: Applying graph theory to consistent tracking of daytime mixed layer height with backscatter lidar. Atmos. Meas. Tech. Discuss. 2017, 10, 1893–1909. [Google Scholar] [CrossRef]
- Morille, Y.; Haeffelin, M.; Drobinski, P.; Pelon, J. STRAT: An Automated Algorithm to Retrieve the Vertical Structure of the Atmosphere from Single-Channel Lidar Data. J. Atmos. Ocean. Technol. 2007, 24, 761–775. [Google Scholar] [CrossRef]
- Pal, S.; Haeffelin, M.; Batchvarova, E. Exploring a geophysical process-based attribution technique for the determination of the atmospheric boundary layer depth using aerosol lidar and near-surface meteorological measurements. J. Geophys. Res. Atmos. 2013, 118, 9277–9295. [Google Scholar] [CrossRef]
- Haeffelin, M.; Angelini, F.; Morille, Y.; Martucci, G.; Frey, S.; Gobbi, G.P.; Lolli, S.; O’Dowd, C.D.; Sauvage, L.; Xueref-Rémy, I.; et al. Evaluation of Mixing-Height Retrievals from Automatic Profiling Lidars and Ceilometers in View of Future Integrated Networks in Europe. Bound. Layer Meteorol. 2012, 143, 49–75. [Google Scholar] [CrossRef]
- Kotthaus, S.; Grimmond, C.S.B. Atmospheric Boundary Layer Characteristics from Ceilometer measurements Part 1: A new method to track mixed layer height and classify clouds. Q. J. R. Meteorol. Soc. 2018, 144, 1525–1538. [Google Scholar] [CrossRef]
- Martucci, G.; Matthey, R.; Mitev, V.; Richner, H. Frequency of Boundary-Layer-Top Fluctuations in Convective and Stable Conditions Using Laser Remote Sensing. Bound. -Layer Meteorol. 2010, 135, 313–331. [Google Scholar] [CrossRef]
- Di Giuseppe, F.; Riccio, A.; Caporaso, L.; Bonafé, G.; Gobbi, G.P.; Angelini, F. Automatic detection of atmospheric boundary layer height using ceilometer backscatter data assisted by a boundary layer model. Q. J. R. Meteorol. Soc. 2012, 138, 649–663. [Google Scholar] [CrossRef]
- Gan, C.-M.; Wu, Y.; Madhavan, B.L.; Gross, B.; Moshary, F. Application of active optical sensors to probe the vertical structure of the urban boundary layer and assess anomalies in air quality model PM2.5 forecasts. Atmos. Environ. 2011, 45, 6613–6621. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, X.; Zhang, L.; Notholt, J.; Zhou, B.; Liu, R.; Zhang, B. Lidar measurement of planetary boundary layer height and comparison with microwave profiling radiometer observation. Atmos. Meas. Tech. 2012, 5, 1965–1972. [Google Scholar] [CrossRef]
- Poltera, Y.; Martucci, G.; Collaud Coen, M.; Hervo, M.; Emmenegger, L.; Henne, S.; Brunner, D.; Haefele, A. PathfinderTURB: An automatic boundary layer algorithm. Development, validation and application to study the impact on in situ measurements at the Jungfraujoch. Atmos. Chem. Phys. 2017, 17, 10051–10070. [Google Scholar] [CrossRef]
- Wiegner, M.; Mattis, I.; Pattantyús-Ábrahám, M.; Bravo-Aranda, J.A.; Poltera, Y.; Haefele, A.; Hervo, M.; Görsdorf, U.; Leinweber, R.; Gasteiger, J.; et al. Aerosol backscatter profiles from ceilometers: Validation of water vapor correction in the framework of CeiLinEx2015. Atmos. Meas. Tech. 2019, 12, 471–490. [Google Scholar] [CrossRef]
- Kotthaus, S.; O’Connor, E.; Münkel, C.; Charlton-Perez, C.; Haeffelin, M.; Gabey, A.M.; Grimmond, C.S.B. Recommendations for processing atmospheric attenuated backscatter profiles from Vaisala CL31 ceilometers. Atmos. Meas. Tech. 2016, 9, 3769–3791. [Google Scholar] [CrossRef]
- Hervo, M.; Poltera, Y.; Haefele, A. An empirical method to correct for temperature-dependent variations in the overlap function of CHM15k ceilometers. Atmos. Meas. Tech. 2016, 9, 2947–2959. [Google Scholar] [CrossRef]
- Wiegner, M.; Madonna, F.; Binietoglou, I.; Forkel, R.; Gasteiger, J.; Geiß, A.; Pappalardo, G.; Schäfer, K.; Thomas, W. What is the benefit of ceilometers for aerosol remote sensing? An answer from EARLINET. Atmos. Meas. Tech. 2014, 7, 1979–1997. [Google Scholar] [CrossRef]
- E-PROFILE. Available online: http://eumetnet.eu/activities/observations-programme/current-activities/e-profile/ (accessed on 30 August 2020).
- Kotthaus, S.; Grimmond, C.S.B. Atmospheric Boundary Layer Characteristics from Ceilometer measurements, Part 2: Application to London’s Urban Boundary Layer. Q. J. R. Meteorol. Soc. 2018, 144, 1511–1524. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Vienna R Foundation for Statistical Computing. R Core Team. R: A Language and Environment for Statistical Computing. 2020. Available online: https://www.R-project.org/ (accessed on 30 August 2020).
- Kotthaus, S.; Halios, C.H.; Barlow, J.F.; Grimmond, C.S.B. Volume for pollution dispersion: London’s atmospheric boundary layer during ClearfLo observed with two ground-based lidar types. Atmos. Environ. 2018, 190, 401–414. [Google Scholar] [CrossRef]
- Met Office. AMDAR (Aircraft Meteorological Data Relay) Reports Collected by the Met Office MetDB System. NCAS British Atmospheric Data Centre. 2008. Available online: http://catalogue.ceda.ac.uk/uuid/220a65615218d5c9cc9e4785a3234bd0 (accessed on 10 July 2020).
- Holzworth, G.C. Estimates of mean and maximum mixing depths in the contiguous United States. Mon. Weather Rev. 1964, 92, 235–242. [Google Scholar] [CrossRef]
- Rahn, D.A.; Mitchell, C.J. Diurnal Climatology of the Boundary Layer in Southern California Using AMDAR Temperature and Wind Profiles. J. Appl. Meteorol. Climatol. 2016, 55, 1123–1137. [Google Scholar] [CrossRef]
- Haeffelin, M.; Barthès, L.; Bock, O.; Boitel, C.; Bony, S.; Bouniol, D.; Chepfer, H.; Chiriaco, M.; Cuesta, J.; Delanoë, J.; et al. SIRTA, a ground-based atmospheric observatory for cloud and aerosol research. Ann. Geophys. 2005, 23, 253–275. [Google Scholar] [CrossRef]
- Pal, S.; Haeffelin, M. Forcing mechanisms governing diurnal, seasonal, and interannual variability in the boundary layer depths: Five years of continuous lidar observations over a suburban site near Paris. J. Geophys. Res. 2015, 120, 11936–11956. [Google Scholar] [CrossRef]
- Heese, B.; Flentje, H.; Althausen, D.; Ansmann, A.; Frey, S. Ceilometer lidar comparison: Backscatter coefficient retrieval and signal-to-noise ratio determination. Atmos. Meas. Tech. 2010, 3, 1763–1770. [Google Scholar] [CrossRef]
- Corripio, J.G. Insol: Solar Radiation. R Package Version 1.1.1. 2014. Available online: https://CRAN.R-project.org/package=insol (accessed on 10 July 2020).
- Barlow, J.F.; Dunbar, T.M.; Nemitz, E.G.; Wood, C.R.; Gallagher, M.W.; Davies, F.; O’Connor, E.; Harrison, R.M. Boundary layer dynamics over London, UK, as observed using Doppler lidar during REPARTEE-II. Atmos. Chem. Phys. 2011, 11, 2111–2125. [Google Scholar] [CrossRef]
- Richardson, L.F. The Supply of Energy from and to Atmospheric Eddies. Proc. R. Soc. Lond. Ser. A Contain. Pap. Math. Phys. Character 1920, 97, 354–373. [Google Scholar] [CrossRef]
- Ballish, B.A.; Kumar, V.K.; Ballish, B.A.; Kumar, V.K. Systematic Differences in Aircraft and Radiosonde Temperatures. Bull. Am. Meteorol. Soc. 2008, 89, 1689–1708. [Google Scholar] [CrossRef]
- Teuling, A.J.; Taylor, C.M.; Meirink, J.F.; Melsen, L.A.; Miralles, D.G.; van Heerwaarden, C.C.; Vautard, R.; Stegehuis, A.I.; Nabuurs, G.-J.; de Arellano, J.V.-G. Observational evidence for cloud cover enhancement over western European forests. Nat. Commun. 2017, 8, 14065. [Google Scholar] [CrossRef]
- Theeuwes, N.E.; Barlow, J.F.; Teuling, A.J.; Grimmond, C.S.B.; Kotthaus, S. Persistent cloud cover over mega-cities linked to surface heat release. NPJ Clim. Atmos. Sci. 2019, 2, 1–15. [Google Scholar] [CrossRef]
- Seibert, P. Review and intercomparison of operational methods for the determination of the mixing height. Atmos. Environ. 2000, 34, 1001–1027. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Kluwer Acad. Publisher: Dordrecht, The Netherlands, 1988; p. 688. [Google Scholar]
- Wiegner, M.; Geiß, A. Aerosol profiling with the Jenoptik ceilometer CHM15kx. Atmos. Meas. Tech. 2012, 5, 1953–1964. [Google Scholar] [CrossRef]
- Hopkin, E.; Illingworth, A.J.; Charlton-Perez, C.; Westbrook, C.D.; Ballard, S. A robust automated technique for operational calibration of ceilometers using the integrated backscatter from totally attenuating liquid clouds. Atmos. Meas. Tech. 2019, 12, 4131–4147. [Google Scholar] [CrossRef]
- Träumner, K.; Kottmeier, C.; Corsmeier, U.; Wieser, A. Convective Boundary-Layer Entrainment: Short Review and Progress using Doppler Lidar. Bound. -Layer Meteorol. 2011, 141, 369–391. [Google Scholar] [CrossRef]
- Bircher-Adrot, S.; E-PROFILE Team. E-PROFILE ALC Network Monthly Report: July 2020; p. 59. Available online: ftp://ftp.meteoswiss.ch/Monthly_Report/ALC_monitoring_202007.pdf (accessed on 20 August 2020).







| Instrument Specifics | Vaisala | Lufft | ||
|---|---|---|---|---|
| CL31 | CL51 | CHM8k | CHM15k | |
| Laser wavelength [nm] | ~905 | ~905 | ~905 | 1064 |
| Emitted power [mW] | 12.0 | 19.5 | 24.0 | 59.5 |
| Laser pulse energy [µJ] | 1.2 | 3.0 | 2.0 | 8.0 |
| Pulse repetition frequency [kHz] | 10.0 | 6.5 | 8 | 5–7 |
| Receiver field of view [mrad] | 0.83 | 0.56 | 1.1 | 0.45 |
| Sample rate [MHz] | 15 | 15 | 30 | 100 |
| Payerne | Palaiseau | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| All | NT | MO | DT | EV | All | NT | MO | DT | EV | |
| Winter | 44 | 53 | 46 | 47 | 39 | 48 | 53 | 48 | 53 | 45 |
| Spring | 41 | 45 | 38 | 42 | 41 | 47 | 48 | 42 | 53 | 47 |
| Summer | 43 | 38 | 37 | 49 | 38 | 47 | 45 | 43 | 52 | 51 |
| Autumn | 49 | 54 | 45 | 49 | 49 | 43 | 47 | 40 | 47 | 40 |
| STRATfinder | CABAM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| All | DJF | MAM | JJA | SON | All | DJF | MAM | JJA | SON | |
| N | 2530 | 184 | 836 | 1136 | 374 | 2530 | 184 | 836 | 1136 | 374 |
| MBE [m] | −54 | −69 | −52 | −63 | −26 | −10 | −16 | 0 | −36 | 47 |
| MAE [m] | 200 | 207 | 201 | 198 | 198 | 213 | 189 | 203 | 229 | 203 |
| RMSE [m] | 280 | 293 | 291 | 270 | 277 | 303 | 265 | 295 | 317 | 296 |
| HR [%] | 79 | 77 | 79 | 79 | 79 | 75 | 80 | 77 | 72 | 78 |
| a | 0.92 | 0.78 | 0.88 | 0.95 | 0.87 | 0.93 | 0.8 | 0.92 | 0.94 | 0.99 |
| b [m] | 38 | 81 | 78 | 11 | 97 | 70 | 115 | 87 | 43 | 61 |
| R2 | 0.75 | 0.53 | 0.66 | 0.77 | 0.69 | 0.7 | 0.59 | 0.65 | 0.67 | 0.67 |
| Payerne | Palaiseau | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| All | NT | MO | DT | EV | All | NT | MO | DT | EV | |
| N | 45211 | 17590 | 8064 | 12734 | 6823 | 72867 | 29018 | 13408 | 19127 | 11314 |
| MBE [m] | 15 | 8 | −55 | −13 | 169 | −4 | 7 | −22 | −65 | 96 |
| MAE [m] | 214 | 183 | 187 | 215 | 325 | 192 | 175 | 153 | 195 | 277 |
| RMSE [m] | 362 | 281 | 308 | 375 | 539 | 326 | 271 | 256 | 350 | 458 |
| a | 1.03 | 0.32 | 0.38 | 1.07 | 1.2 | 0.95 | 0.55 | 0.39 | 0.92 | 1.14 |
| b [m] | −5 | 268 | 238 | −83 | 14 | 28 | 178 | 226 | 27 | −30 |
| R2 | 0.53 | 0.02 | 0.21 | 0.56 | 0.39 | 0.64 | 0.07 | 0.18 | 0.61 | 0.5 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotthaus, S.; Haeffelin, M.; Drouin, M.-A.; Dupont, J.-C.; Grimmond, S.; Haefele, A.; Hervo, M.; Poltera, Y.; Wiegner, M. Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC). Remote Sens. 2020, 12, 3259. https://doi.org/10.3390/rs12193259
Kotthaus S, Haeffelin M, Drouin M-A, Dupont J-C, Grimmond S, Haefele A, Hervo M, Poltera Y, Wiegner M. Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC). Remote Sensing. 2020; 12(19):3259. https://doi.org/10.3390/rs12193259
Chicago/Turabian StyleKotthaus, Simone, Martial Haeffelin, Marc-Antoine Drouin, Jean-Charles Dupont, Sue Grimmond, Alexander Haefele, Maxime Hervo, Yann Poltera, and Matthias Wiegner. 2020. "Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC)" Remote Sensing 12, no. 19: 3259. https://doi.org/10.3390/rs12193259
APA StyleKotthaus, S., Haeffelin, M., Drouin, M.-A., Dupont, J.-C., Grimmond, S., Haefele, A., Hervo, M., Poltera, Y., & Wiegner, M. (2020). Tailored Algorithms for the Detection of the Atmospheric Boundary Layer Height from Common Automatic Lidars and Ceilometers (ALC). Remote Sensing, 12(19), 3259. https://doi.org/10.3390/rs12193259