1. Introduction
Global Navigation Satellite Systems (GNSSs) have been extensively used for scientific and commercial applications in geodesy, geodynamics, transportation, and other industries [
1,
2,
3,
4,
5]. With the rapid development of GNSSs over the last several decades, the global users will be able to use the multi-constellation and multi-frequency observations to improve the reliability and availability [
6,
7,
8,
9,
10]. In many emerging GNSS applications, such as precise positioning of drones and unmanned vehicles, the accuracy and availability of real-time kinematic (RTK) are crucially of paramount importance. However, the performance of single-baseline RTK (SBRTK) degrades greatly due to signal blockage and multipath errors.
Many research efforts have been expanded to improve the RTK positioning accuracy and availability in urban areas. The mostly investigated method is the increasing use of observations including multiple satellite systems and reference or rover receivers [
11,
12,
13]. Combing the global positioning system (GPS) and Beidou navigation system (BDS) positioning, the number of available satellites for users increases, which has a potential to improve the positioning accuracy and availability [
14,
15,
16,
17]. As the observations were inevitably contaminated by cycle slips and gross errors, Liu et al. [
18] and Li et al. [
19] applied a robust Kalman filter to detect the outliers and achieved good performances. To obtain the redundancy of the frequencies overlap between the systems, a priori corrections for differential inter-system biases (DISBs) was adopted to obtain the better ambiguity resolution (AR) and improve the positioning performance [
20,
21,
22]. In addition, the multiple reference stations approach can provide better positioning accuracy [
23,
24], which is recommended when precise kinematic positioning is required. The concept of the multiple rover constraints algorithm with multiple antennas on a common moving platform has been introduced to increase the reliability and accuracy for attitude determination [
25] and RTK positioning [
26,
27]. However, in the above-mentioned studies, a model of single-baseline solution (SBS) is generally adopted to process the observational data. In particular, when multiple reference receivers are used, the SBS model is not appropriate, because multiple reference receivers can cause the inconsistencies in coordinates of rover receiver, which would directly affect the positioning accuracy and availability.
Since the introduction by Schaffrin and Grafarend [
28], the equivalence between the undifferenced and the differenced observations has attracted increasing attention from the satellite geodesy community. Lindlohr and Wells [
29] pointed out that the undifferenced and differenced observation equations would result in the same normal equation as long as the parameters in the undifferenced observation equations were independent. Xu [
30,
31] proposed the equivalent observation equation to unify the undifferenced and differenced methods. Afterward, Shen and Xu [
32] developed the simplified equivalent equations to obtain the multi-baseline solution (MBS) using corresponding pseudo-observations. Shen and Li [
33] developed the simplified equivalent equations in the case of each receiver tracking different satellites with elevation-dependent weights, whose computation efficiency was significantly improved comparing to that of the SBS. Wang and Xu [
34] proposed a new model of MBS based on the equivalence principle for static positioning. However, the carrier phase model for the multi-baseline RTK (MBRTK) has not been studied in the kinematic application.
In MBRTK, the high-dimensional ambiguity needs to be estimated. It is often not necessary to resolve all the ambiguities to achieve the required accuracy for the final position [
35]. Verhagen et al. [
36,
37] and Li et al. [
38] proposed a partial ambiguity resolution (PAR) method for a subset of ambiguities selected according to the successively increased elevations, and the ratio test was used for ambiguity validation. Shi and Gao [
39] also presented a new method to determine the subset with maximum ambiguities in an iterative process, validating each subset by applying the success rate and ratio tests. Li et al. [
40] proposed a modified PAR method based on the method of Wang and Feng [
41] to find a subset of decorrelated ambiguities. Jazaeri et al. [
42] developed integer search estimation based on the lattice theory whose search algorithms were presented and proved to be many times faster than the least-squares ambiguity decorrelation adjustment (LAMBDA) [
43] and modified LAMBDA [
44]. Wu and Bian [
45] developed a posterior probability test to validate each ambiguity subset, which can guarantee the correct fixing confidence. However, in the above-mentioned methods, the fixing and computing efficiency of high-dimensional ambiguity for the MBRTK has not been investigated.
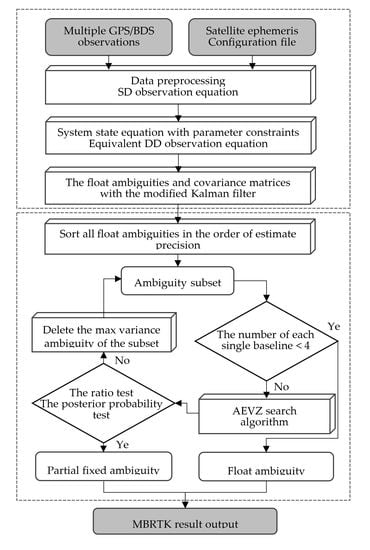
To address the aforementioned problems, a rigorous algorithm for MBRTK is presented in this paper to improve the RTK positioning accuracy and availability using multiple reference receivers, and a modified Kalman filter with parameter constraints is used to estimate the system states. Then, a PAR strategy for high-dimensional ambiguity is proposed to determine an ambiguity subset with high confidence. In order to validate and assess the performance of the proposed method, the positioning results of different satellite systems and reference stations are calculated and compared with the SBRTK.
This paper is organized as follows. In
Section 2, conventional single-differenced (SD) and equivalent double-differenced (DD) observation equations are introduced. Then, a modified Kalman filter with parameter constraints is proposed. The redundancy of MBRTK is given, along with the data processing flow. In
Section 3, the static and kinematic experiments are carried out and the impact of satellite systems as well as the reference receivers are discussed. Finally, our conclusions are summarized in
Section 4.
4. Discussion
The results of
Section 3 indicate that the reference coordinates of rover receiver (TBR9) are calculated by Waypoint IE software 8.60 for a forward-reverse model with three reference receivers. However, the forward Kalman filter is applied to obtain the positioning results in MBRTK algorithm. The differences of model in the data processing would lead to a systematic positioning error, as shown in
Table 6.
In addition, the positioning results of the forward-reverse model of IE software 8.60 still have the positioning error compared to the true position of rover receiver. Thus, to study the above differences, three additional schemes with different single reference receiver are conducted using the forward–reverse model by IE software 8.60. The statistics are listed in
Table 7.
As can be seen, both the RMS and STD values of SDWA-TBR9 for IE software 8.60 can achieve the mm level and the positioning results are approximately equal to the reference coordinates of rover receiver by IE software 8.60. However, for the RMS and STD values of SDWB-TBR9 and SOTH-TBR9 using IE software 8.60, there is an obvious systematic error with cm level. That is to say, the reference coordinates by IE software 8.60 with three reference receivers are probably weighted average values based on the positioning results of SDWA-TBR9, SDWB-TBR9, and SOTH-TBR9, and the weight of SDWA-TBR9 is largest among the three single baselines. In other words, the reference coordinates of TBR9 are only relatively precise, but not absolutely accurate. It is worth noting that although the scheme-five and scheme-six still have a systematic error with cm level, the model of MBRTK is rigorous and reliable, which also have a higher success rate than those of three additional schemes by IE software 8.60.
5. Conclusions
In this paper, we present a new algorithm of MBRTK based on the equivalence principle for precise kinematic positioning. First, equivalent DD observation equations using SD observations are obtained through the equivalent transform to eliminate the receiver clock errors. Second, considering the redundancy of state information, a modified Kalman filter with parameter constraints is proposed to estimate the position–velocity states and equivalent DD ambiguities. The most outstanding feature of the MBRTK is that it has a rigorous model to solve the correlative characteristics of differenced observations for multiple reference receivers, as well as high positioning accuracy and availability could be achieved.
From the experiment and analysis, the following conclusions can be obtained:
- (1)
For the static experiment, the MBRTK has better positioning accuracy than SBRTK. The MBRTK results with two and three reference receivers have the improvement of positioning accuracy by approximately (14%, 13%, and 14%), and (21%, 17%, and 19%) in N, E, and U components, respectively, validating the feasibility and reliability of the proposed MBRTK.
- (2)
For the kinematic experiment, combined GPS/BDS positioning for MBRTK increases the number of available satellites and redundancy of the positioning model. Compared with single GPS and single BDS positioning, the combined GPS/BDS positioning has the accuracy improvement by approximately (45%, 35%, and 27%) and (12%, 6%, and 19%) in N, E, and U components and the availability improvement by approximately 33% and 10%, respectively.
- (3)
For the analysis of reference receivers, the MBRTK model with multiple reference receivers can significantly increase the redundancy and provide the smaller ADOP values in favor to improve the performance of AR in comparison to the SBRTK model. The positioning results with two and three reference receivers can provide the similar accuracy of 3.0 cm, 1.5 cm, and 4.5 cm level in N, E, and U components, which have the accuracy improvement by approximately (9%, 0%, and 6%) and (9%, 16%, and 16%) compared with two SBRTK results, respectively. Meanwhile, the MBRTK results with two and three reference receivers have the availability improvement by approximately 10% in the success rate.
- (4)
Due to the different models adopted by IE software 8.60 and MBRTK, there exists systematic errors between them. Compared with the positioning results of IE software 8.60 with one reference receiver, the MBRTK can achieve the stable accuracy with the cm-level, and have a rigorous and reliable model to keep a high availability of kinematic positioning.
Our future work will extend this algorithm to multi-frequency and multi-GNSS positioning considering the computational efficiency, and focus the distribution of multiple reference receivers to improve the precision, availability, and reliability of positioning results.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}