A Multi-GNSS Differential Phase Kinematic Post-Processing Method





Abstract
1. Introduction
2. Methods
2.1. GPS/Galileo/BDS DD Observation Equations
2.2. GLONASS DD Observation Equations
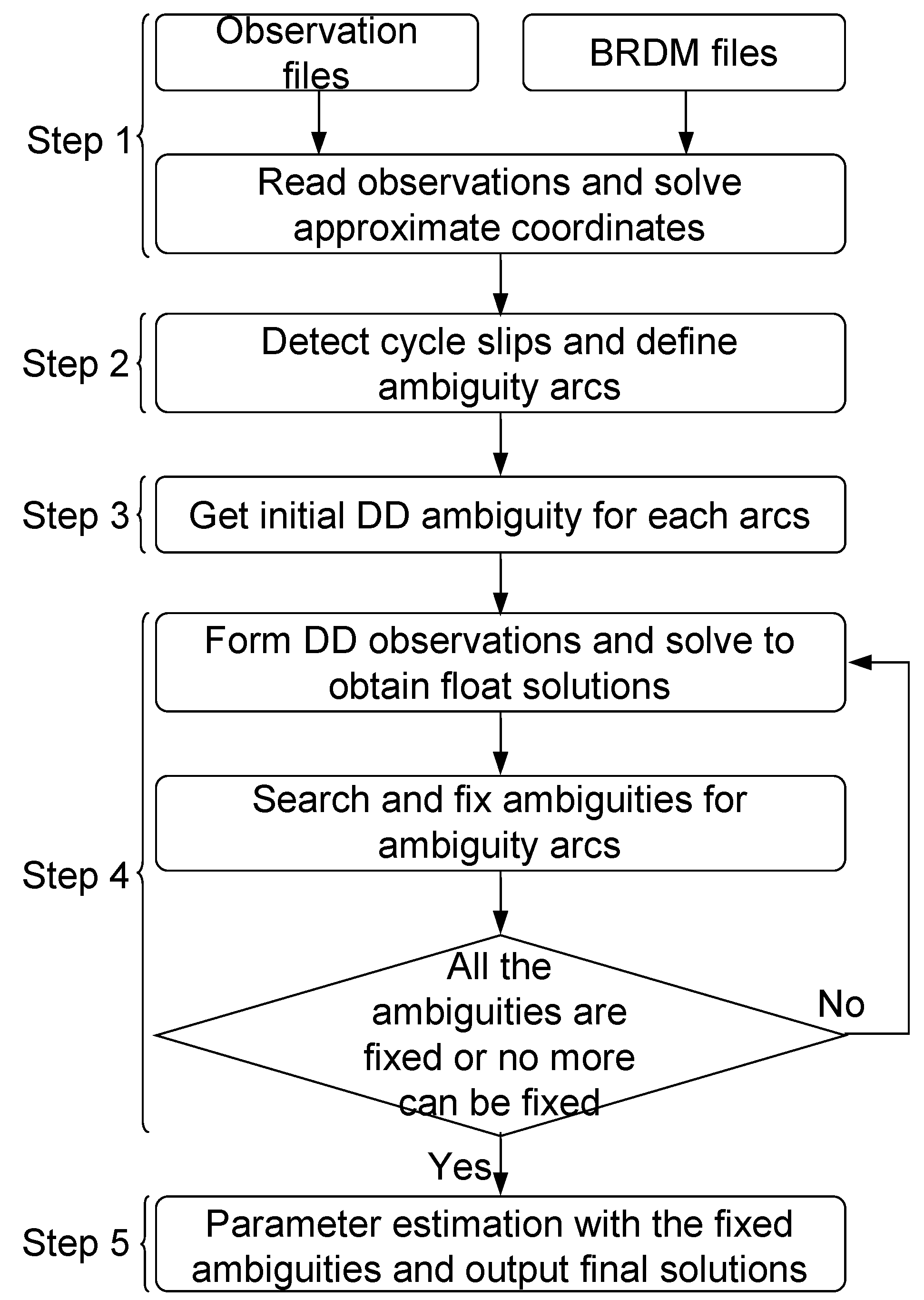
2.3. Data Processing Flowchart
- Step 1:
- Read receiver-independent exchange format (RINEX) observations and broadcast ephemeris, transform the original GLONASS carrier phase observations into the basic frequency as shown in (7), and solve the approximate coordinates of a rover station with DD pseudorange IF combinations (PCs).
- Step 2:
- Detect cycle slips and define ambiguity arcs.
- Step 3:
- Attain initial DD ambiguity for every ambiguity arc. If GLONASS data are available, the SD ambiguities can also be estimated.
- Step 4:
- Form DD observations epoch by epoch, solve the resolution with Kalman filtering (KF) to obtain float solutions, and search and fix ambiguities for ambiguity arcs.
- Step 5:
- Form DD observations, estimate parameters with the fixed ambiguities and use forward and backward KF to smooth the fixed solutions; output the final solutions. The detailed algorithms will be introduced in the following statements.
2.4. Data Pre-Processing and Ambiguity Arc Definition
2.5. Initial Ambiguity Resolution Using MW+GF Combinations
2.6. Ambiguity Resolution
3. Experimental Analysis
3.1. Data Collection and Processing Strategies
3.2. Ambiguity Resolution
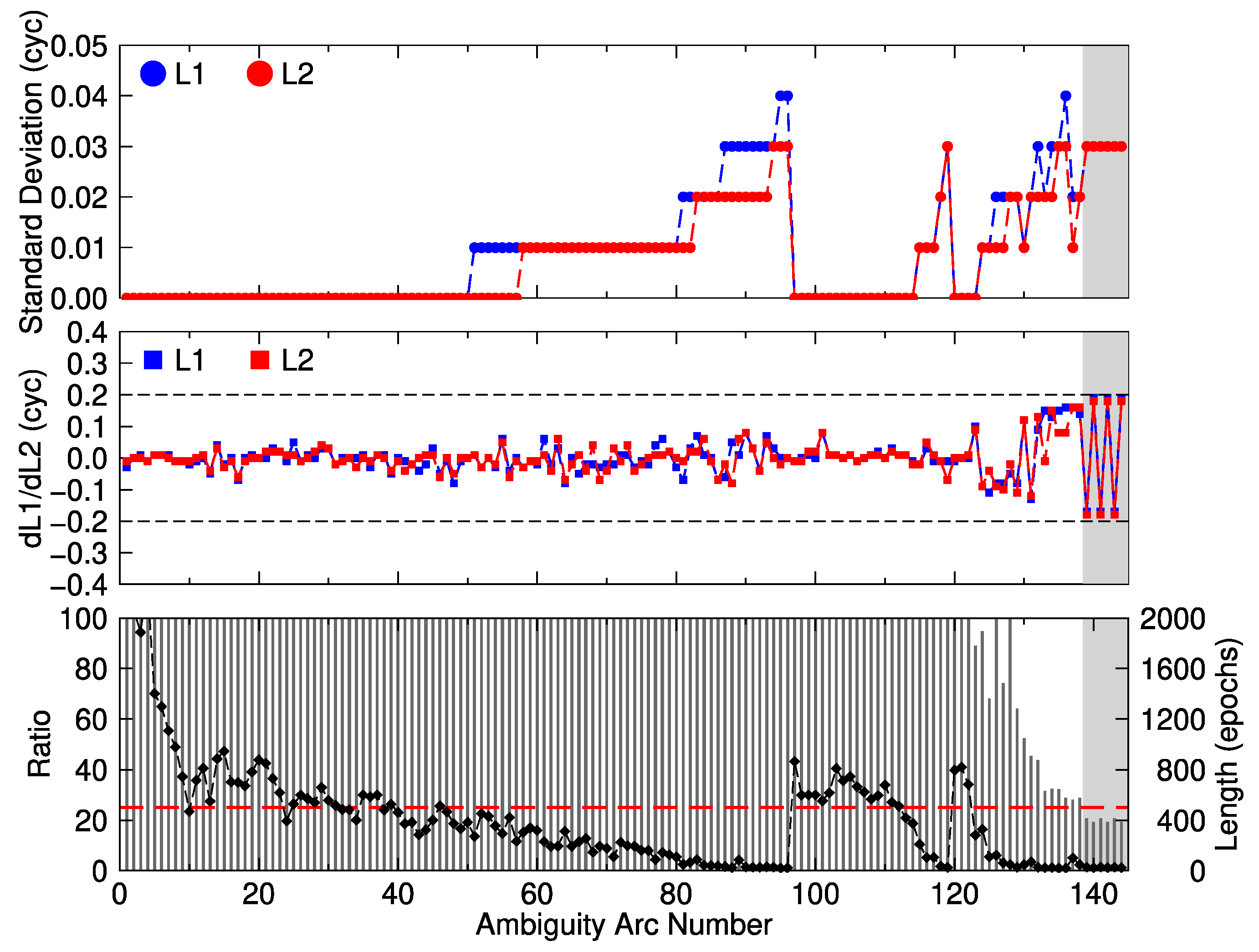
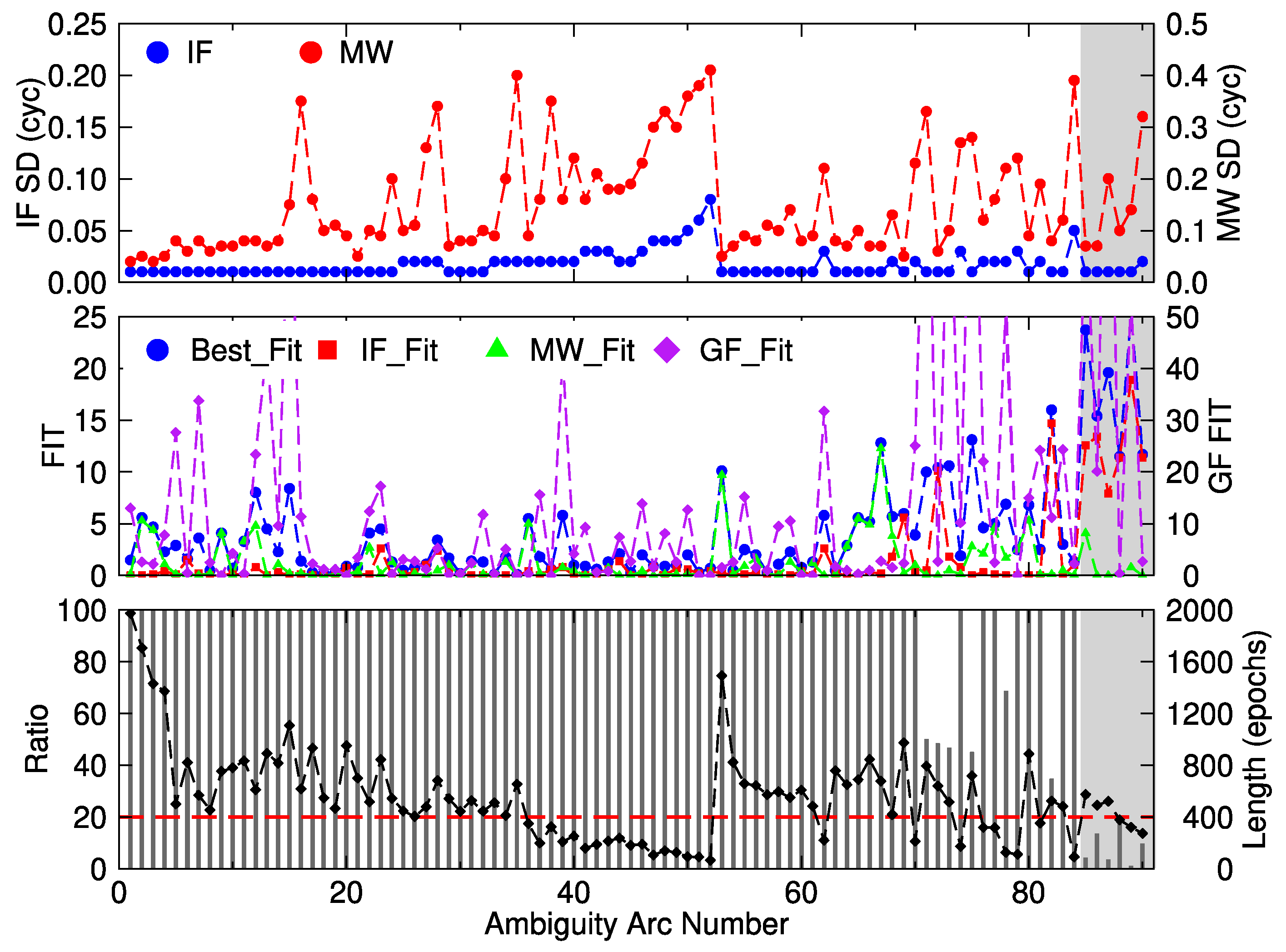
3.2.1. Ambiguity Fixing Performance
3.2.2. Ambiguity-Fixing Rate
3.3. Static Experimental Analysis
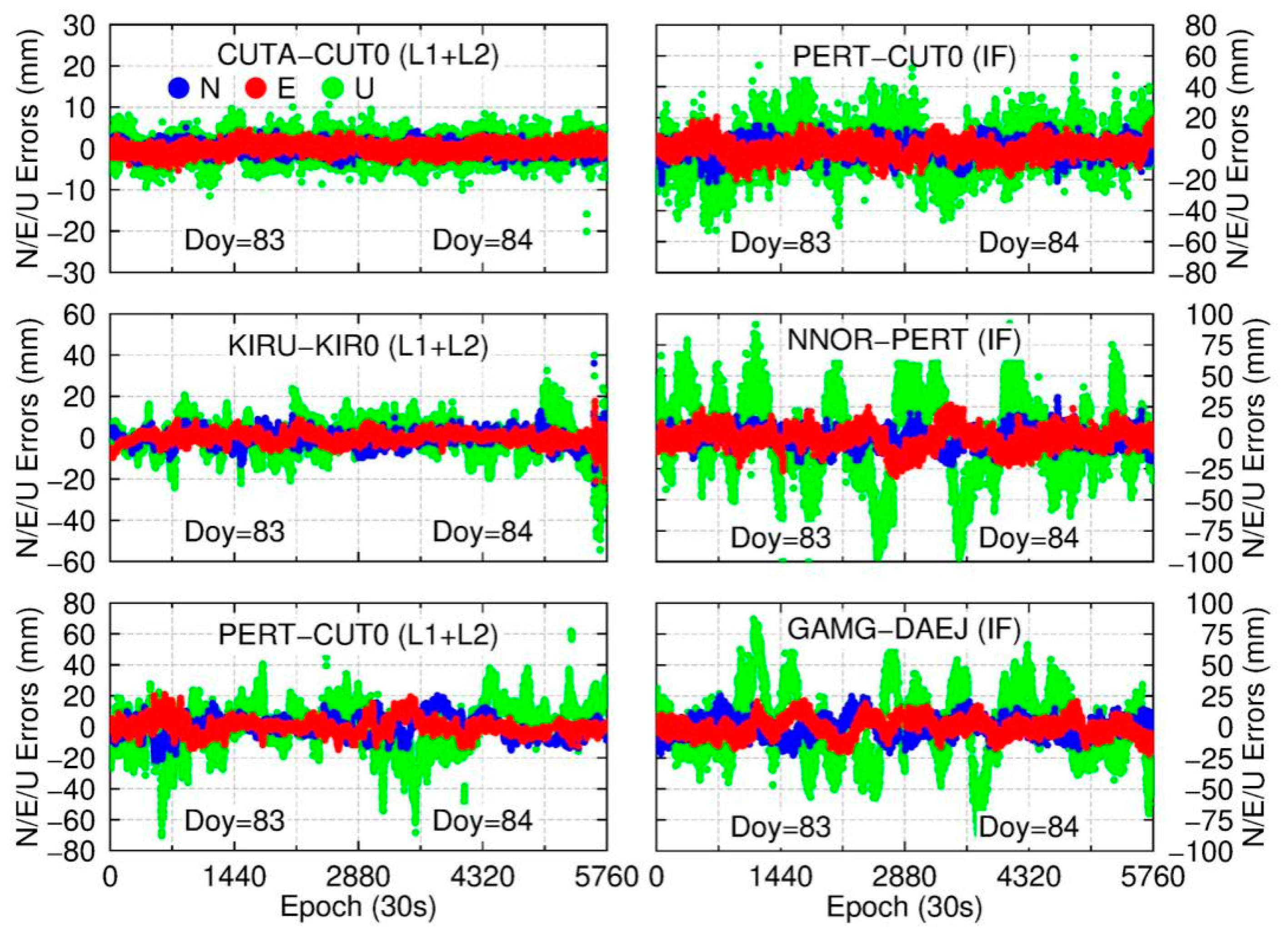
3.3.1. Positioning Results
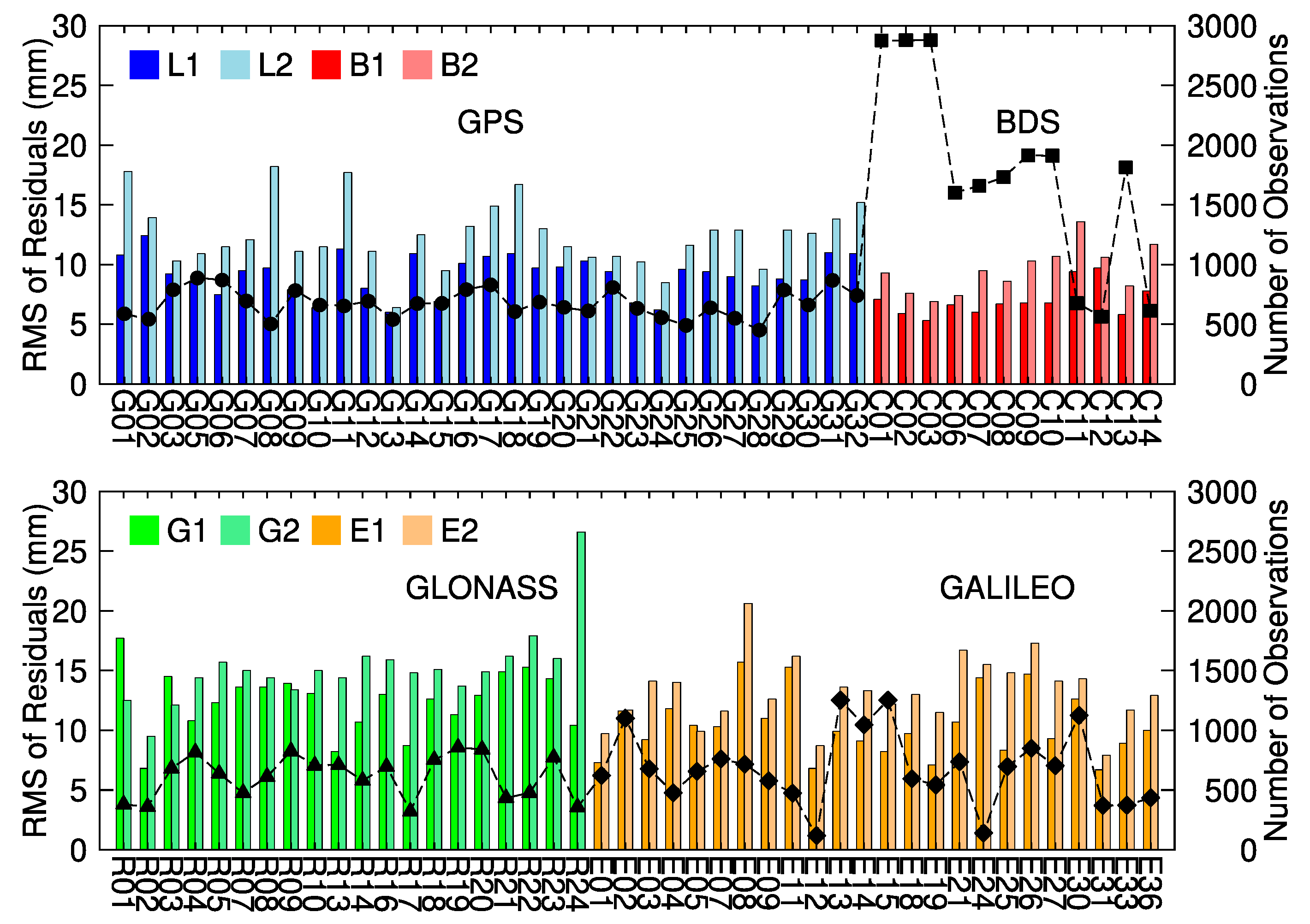
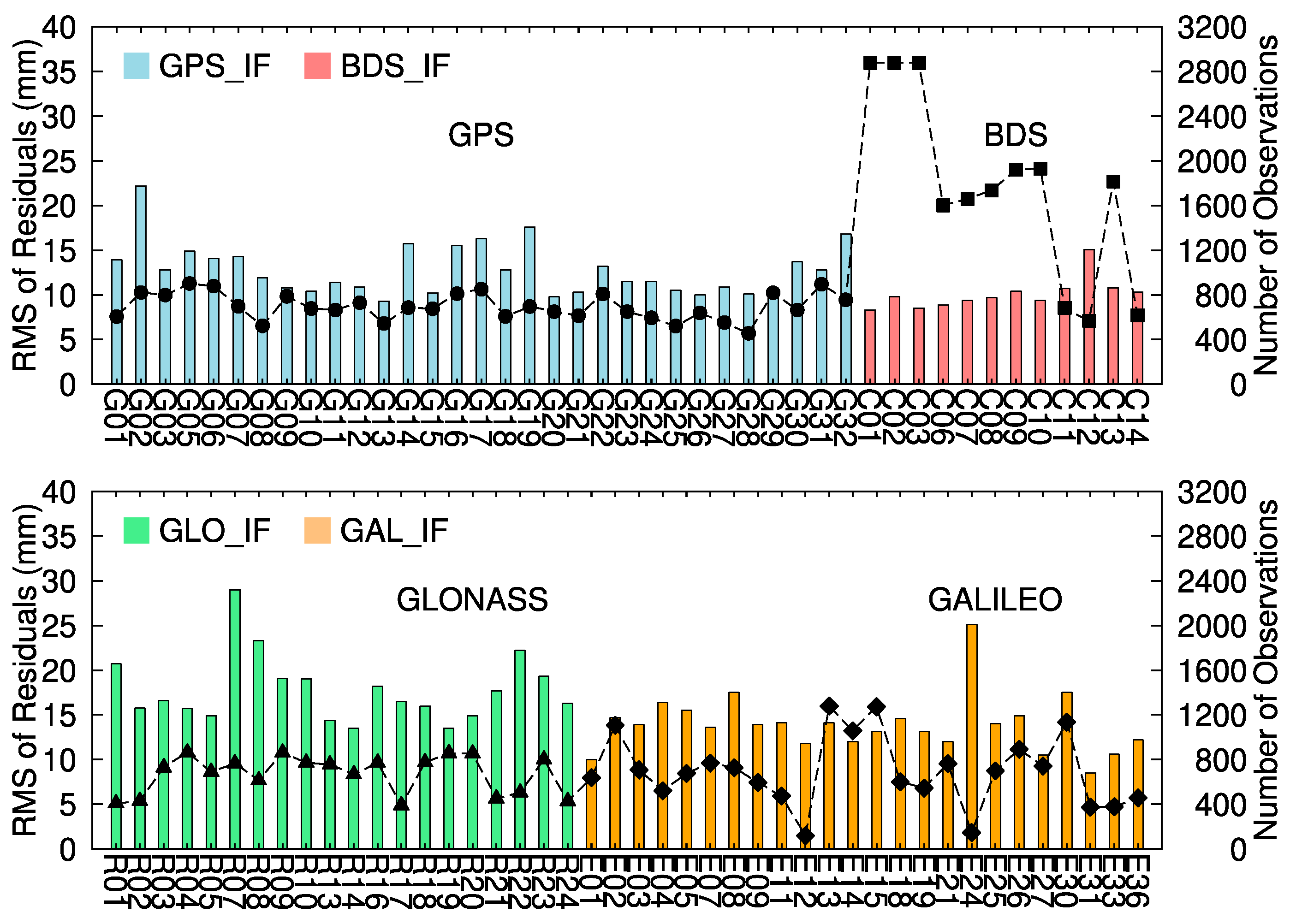
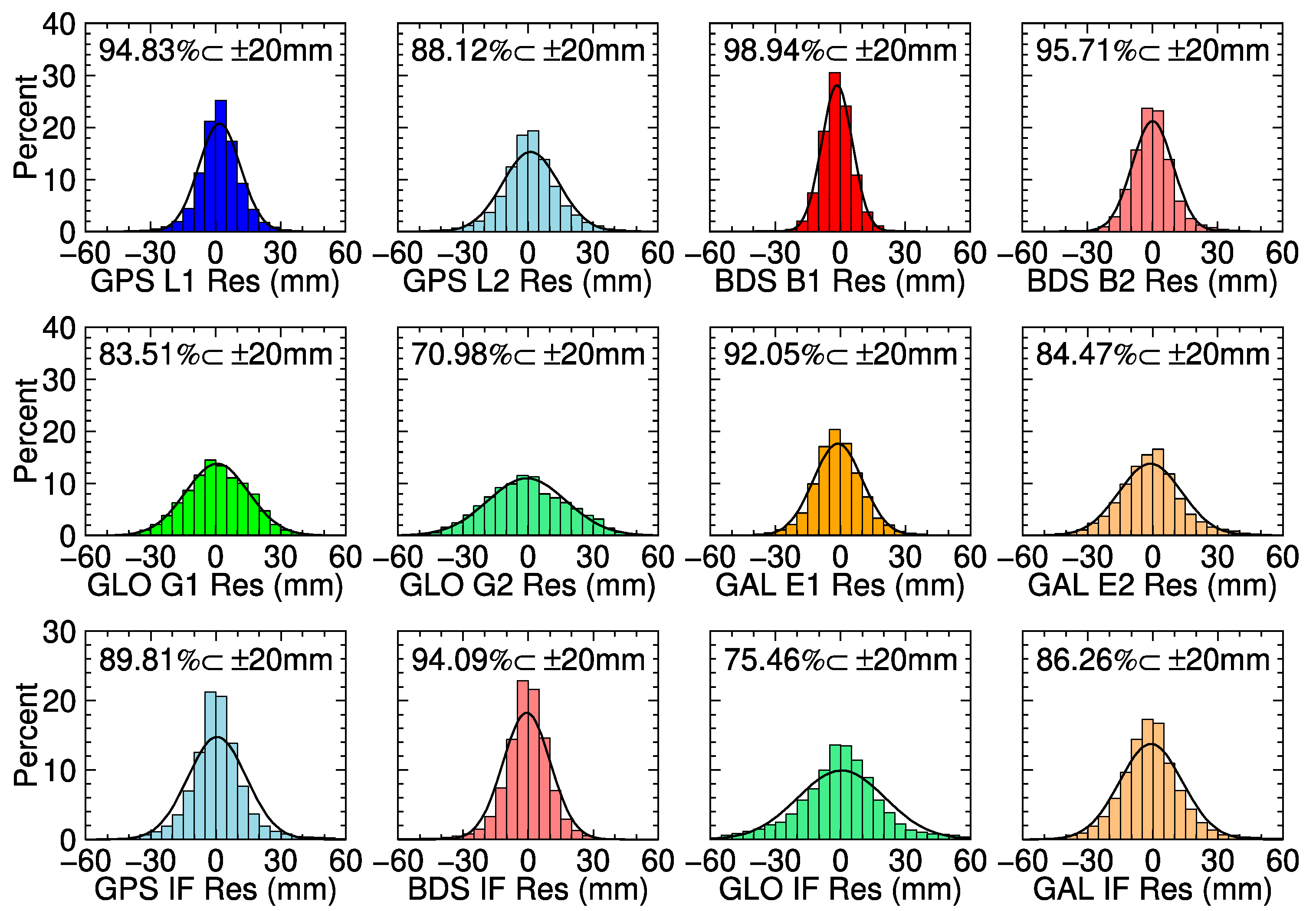
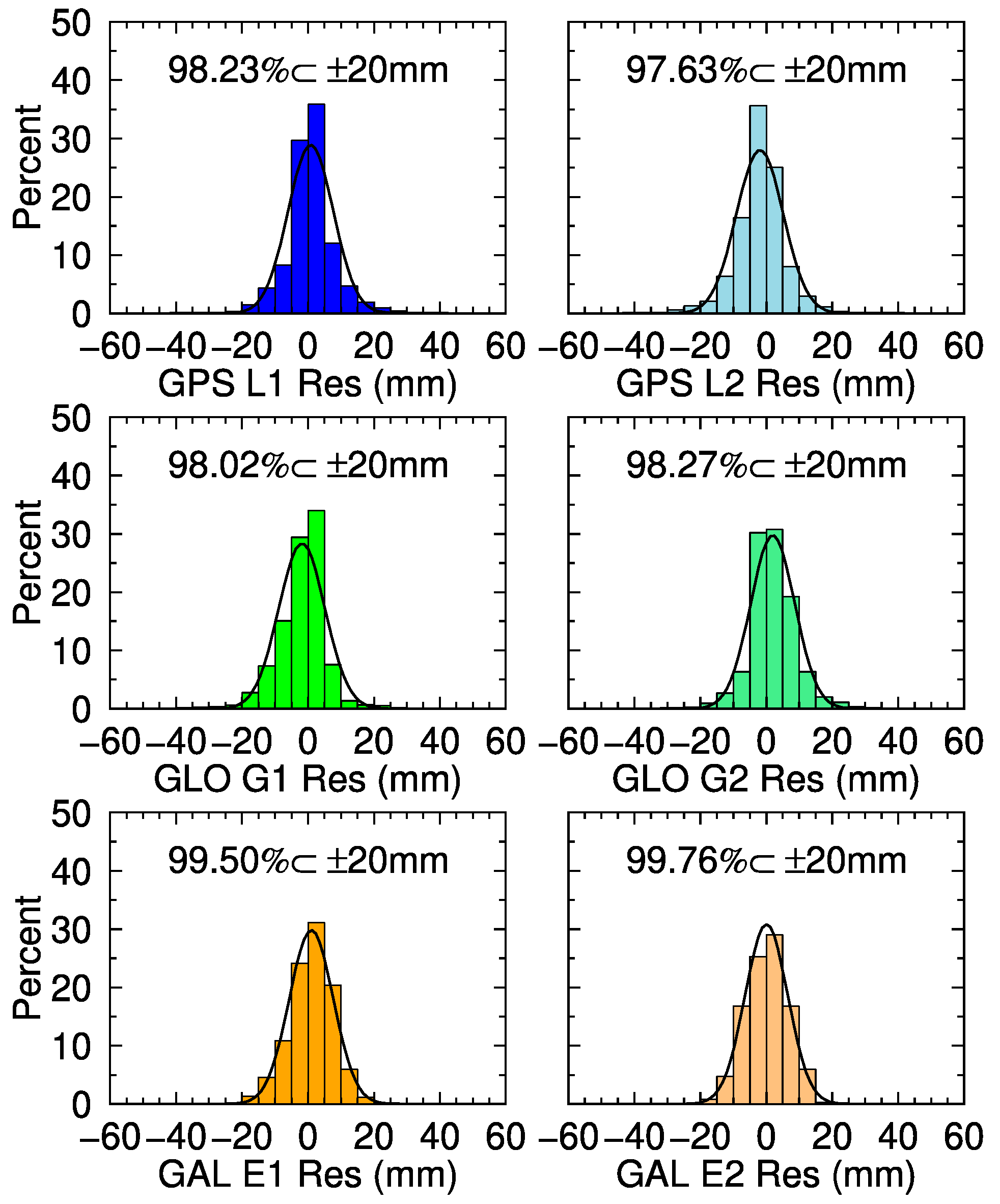
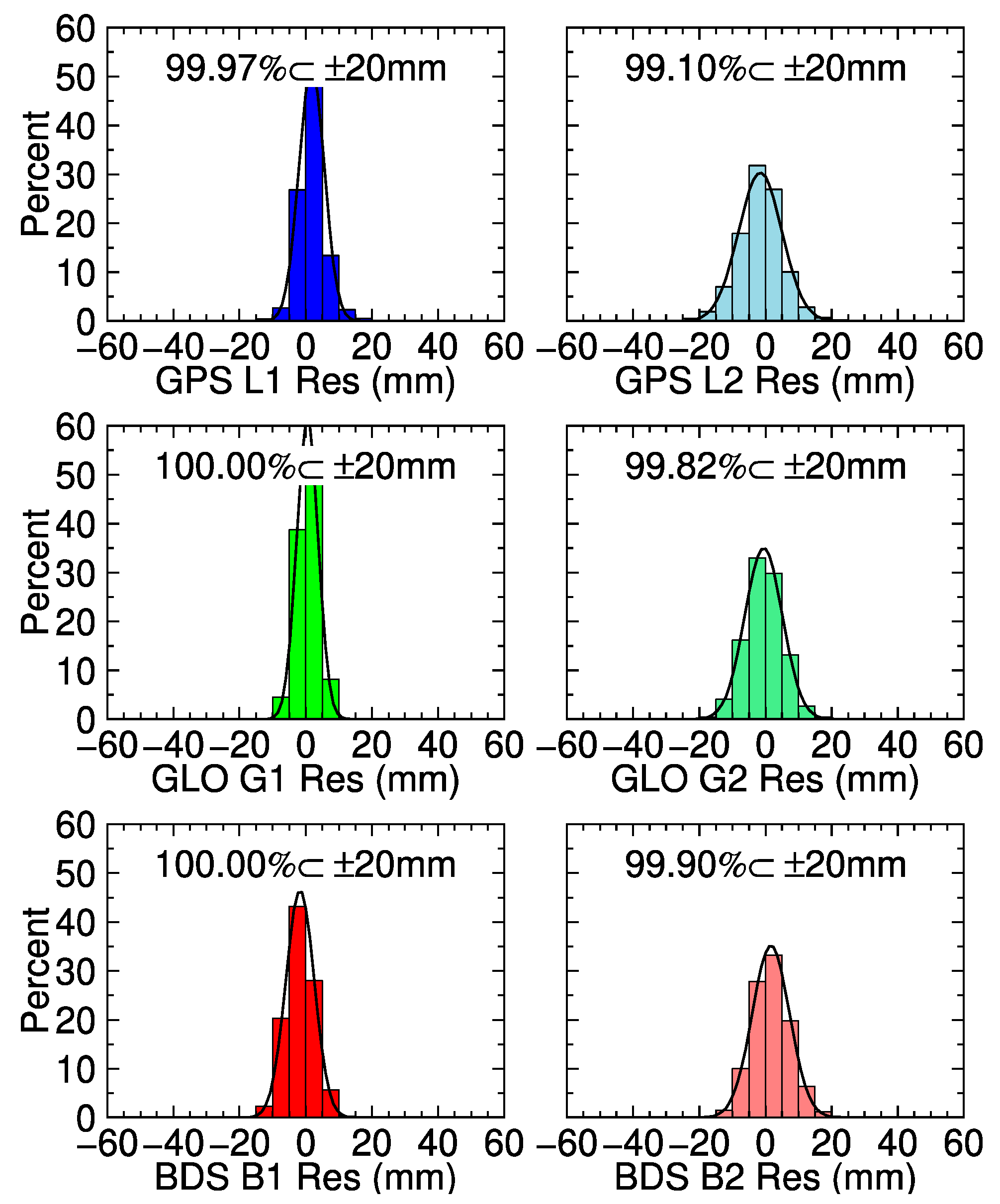
3.3.2. Residual Analysis
3.4. Kinematic Experimental Analysis
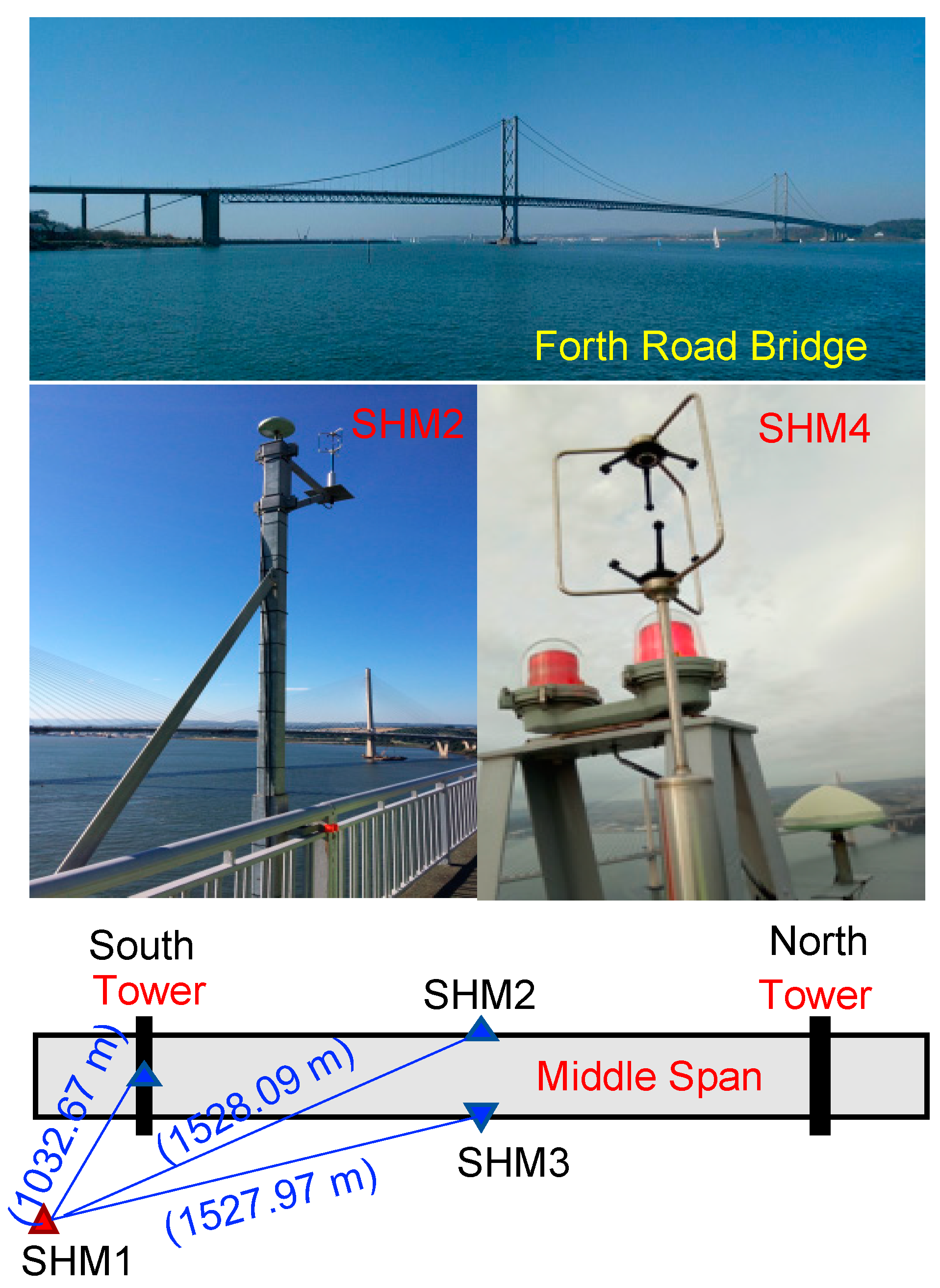
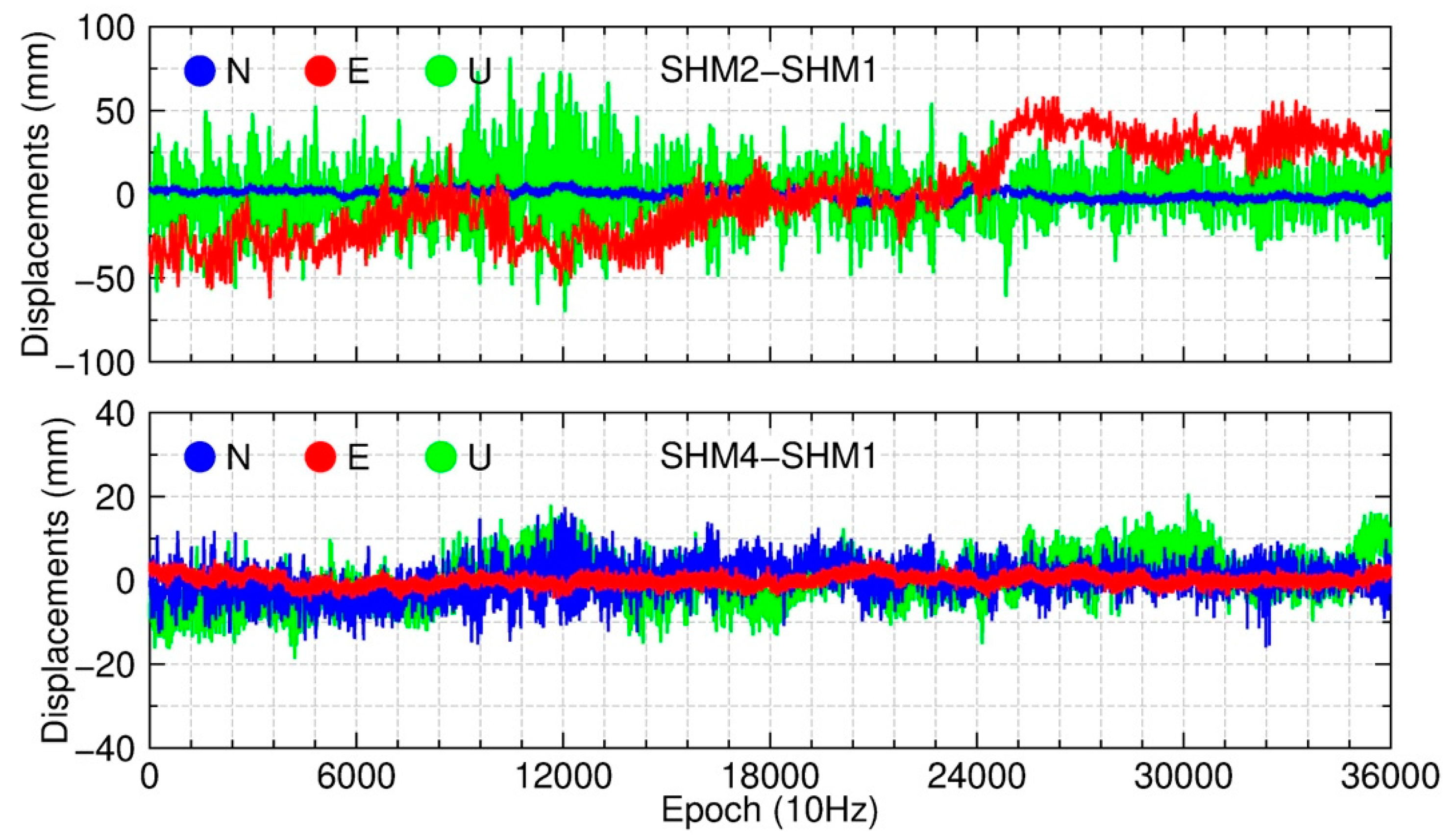
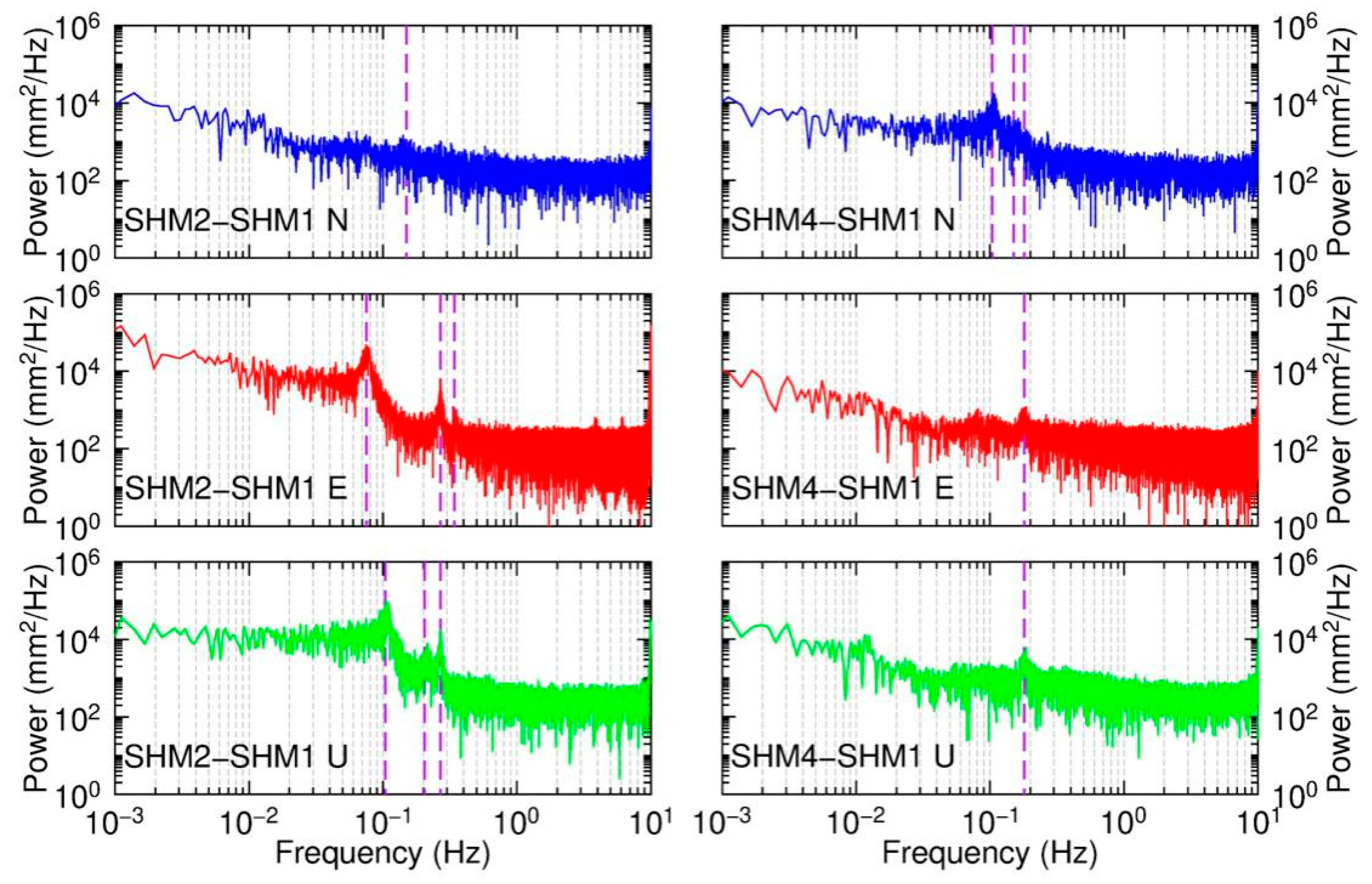
3.4.1. Bridge Monitoring Experimental Analysis
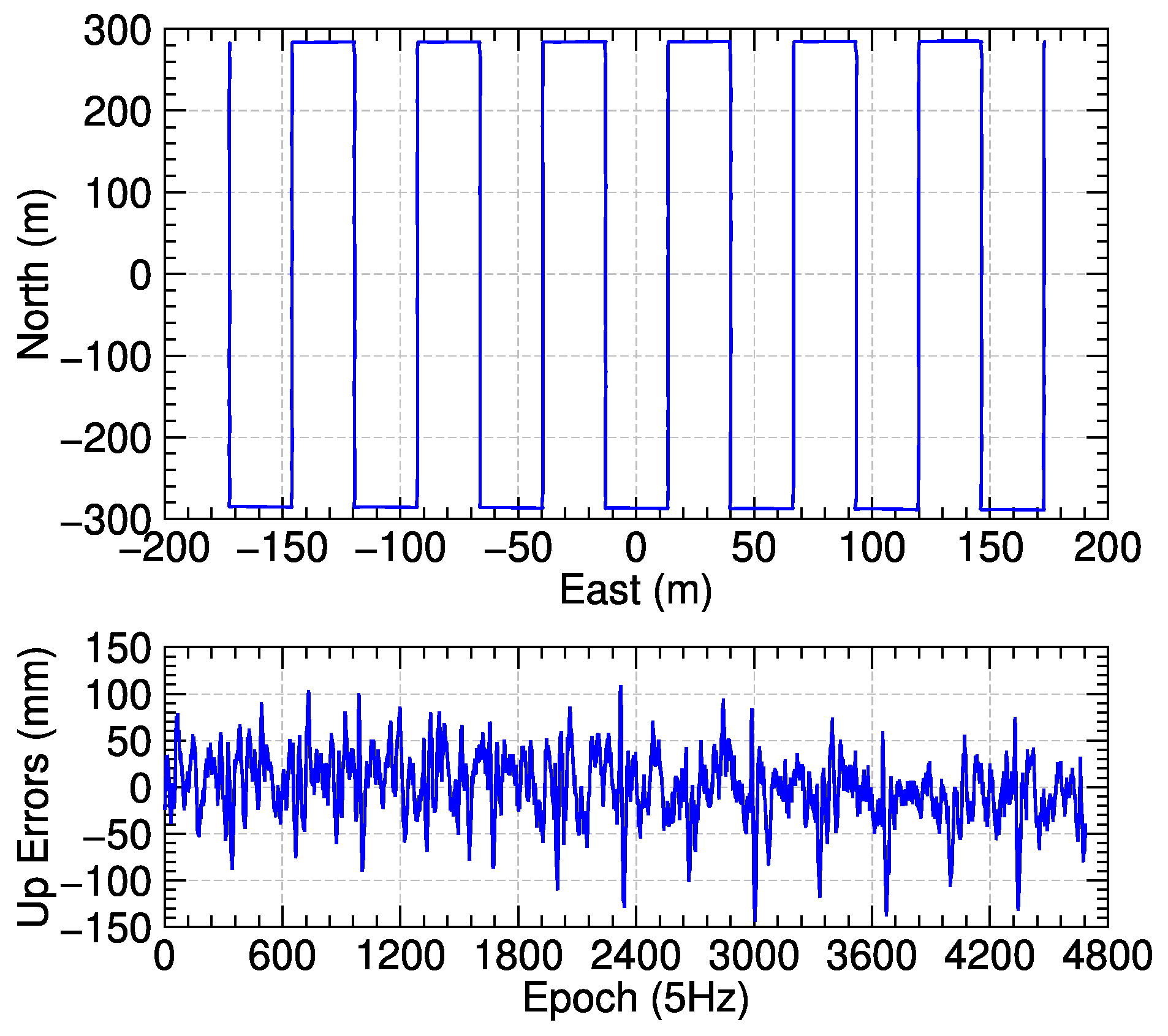
3.4.2. UAV Flying Trial Analysis
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; di Cella, U.M.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with GNSS-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; di Cella, U.M.; Roncella, R.; Santise, M. Quality assessment of DSMs produced from UAV flights georeferenced with on-board RTK positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Li, W.; Li, W.; Cui, X.; Zhao, S.; Lu, M. A tightly coupled RTK/INS algorithm with ambiguity resolution in the position domain for ground vehicles in harsh urban environments. Sensors 2018, 18, 2160. [Google Scholar] [CrossRef] [PubMed]
- Meng, X.; Roberts, G.W.; Dodson, A.H.; Cosser, E.; Barnes, J.; Rizos, C. Impact of GPS satellite and pseudolite geometry on structural deformation monitoring: Analytical and empirical studies. J. Geod. 2004, 77, 809–822. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.; Roberts, G.W. Detecting bridge dynamics with GPS and triaxial accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Meng, X.; Nguyen, D.; Xie, Y.; Owen, J.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and implementation of a new system for large bridge monitoring—GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef]
- Meng, X.; Xi, R.; Xie, Y. Dynamic characteristic of the forth road bridge estimated with GeoSHM. J. Glob. Position. Syst. 2018, 16, 4. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. Dynamic multipath in structural bridge monitoring: An experimental approach. GPS Solut. 2014, 18, 209–218. [Google Scholar] [CrossRef]
- Imparato, D.; El-Mowafy, A.; Rizos, C.; Wang, J. Vulnerabilities in SBAS and RTK positioning in intelligent transport systems: An overview. In Proceedings of the International Global Navigation Satellite System Association IGNSS Symposium, Sydney, Australia, 7–9 February 2018. [Google Scholar]
- Fan, P.; Li, W.; Cui, X.; Lu, M. Precise and robust RTK-GNSS positioning in urban environments with Dual-antenna configuration. Sensors 2019, 19, 3586. [Google Scholar] [CrossRef]
- El-Mowafy, A. Analysis of web-based GNSS post-processing services for static and kinematic positioning using short data spans. Surv. Rev. 2011, 43, 535–549. [Google Scholar] [CrossRef]
- Chen, G. GPS Kinematic Positioning for the Airborne Laser Altimetry at Long Valley, California. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1998. [Google Scholar]
- Lu, B.; Jin, J.; Duan, W.; Chen, L.; Guan, H. Research of GPS signal multipath effects based on GAMIT TRACK. Adv. Mater. Res. 2012, 588, 912–919. [Google Scholar] [CrossRef]
- King, M.; Williams, S. Apparent stability of GPS monumentation from short-baseline time series. J. Geophys. Res. 2009, 114. [Google Scholar] [CrossRef]
- Moschas, F.; Stiros, S. PLL bandwidth and noise in 100 Hz GPS measurements. GPS Solut. 2015, 19, 173–185. [Google Scholar] [CrossRef]
- Tiryakioglu, I.; Yigit, C.O.; Yavasoglu, H.; Saka, M.H.; Alkan, R.M. The determination of interseismic, coseismic and postseismic deformations caused by the Gökçeada-Samothraki earthquake (2014, Mw: 6.9) based on GNSS data. J. Afr. Earth Sci. 2017, 133, 86–94. [Google Scholar] [CrossRef]
- Zrinjski, M.; Barković, Đ.; Matika, K. Razvoj i modernizacija GNSS-a. Geodetski list. 2019, 73, 45–65. [Google Scholar]
- Teunissen, P.J.G.; Montenbruck, O. Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin, Germany, 2017. [Google Scholar]
- Teunissen, P.J.G. A new GLONASS FDMA model. GPS Solut. 2019, 23, 100. [Google Scholar] [CrossRef]
- Leick, A. GLONASS satellite surveying. J. Surv. Eng. 1998, 124, 91–99. [Google Scholar] [CrossRef]
- Sleewaegen, J.; Simsky, A.; Wilde, W.; Boon, F.; Willems, T. Demystifying GLONASS inter-frequency carrier phase biases. Inside GNSS 2012, 7, 57–61. [Google Scholar]
- Geng, J.; Zhao, Q.; Shi, C.; Liu, J. A review on the inter-frequency biases of GLONASS carrier-phase data. J. Geod. 2017, 91, 329–340. [Google Scholar] [CrossRef]
- Xi, R.; Meng, X.; Jiang, W.; An, X.; Chen, Q. GPS/GLONASS carrier phase elevation-dependent stochastic modelling estimation and its application in bridge monitoring. Adv. Space Res. 2018, 62, 2566–2585. [Google Scholar] [CrossRef]
- Gurtner, W.; Estey, L. RINEX: The Receiver Independent Exchange Format, Version 3.02; Technical Report; IGS Central Bureau: Pasadena, CA, USA, 2013. [Google Scholar]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Use Artif. Satell. Geod. 1972, 15, 247–251. [Google Scholar]
- Böhm, J.; Möller, G.; Schindelegger, M.; Pain, G.; Weber, R. Development of an improved empirical model for slant delays in the troposphere (GPT2w). GPS Solut. 2015, 19, 433–441. [Google Scholar] [CrossRef]
- Böhm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophy. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]
- King, M.; Watson, C.; Penna, N.; Clarke, P. Subdaily signals in GPS observations and their effect at semiannual and annual periods. Geophys. Res. Lett. 2008, 35, L03302. [Google Scholar] [CrossRef]
- King, M.; Watson, C. Long GPS coordinate time series: Multipath and geometry effects. J. Geophys. Res. Sol. Earth 2010, 115, B4. [Google Scholar] [CrossRef]
- Xi, R.; Zhou, X.; Jiang, W.; Chen, Q. Simultaneous estimation of dam displacements and reservoir level variation from GPS measurements. Measurement 2018, 122, 247–256. [Google Scholar] [CrossRef]
- Meng, X.; Nguyen, D.; Owen, J.; Xie, Y.; Psimoulis, P.; Ye, G. Application of GeoSHM System in Monitoring Extreme Wind Events at the Forth Road Bridge. Remote Sens. 2019, 11, 2799. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Baselines | Locations of Stations | Length | Statement | Data Length, Sampling Rate |
|---|---|---|---|---|
| CUTA-CUT0 | Curtin, Australia | 8.42 m | Static | 7 d, 30 s |
| KIRU-KIR0 | Kiruna, Sweden | 4.47 km | Static | 7 d, 30 s |
| PERT-CUT0 | Perth, Australia | 22.41 km | Static | 7 d, 30 s |
| NNOR-PERT | New Norcia, Australia | 88.56 km | Static | 7 d, 30 s |
| GAMG-DAEJ | Daejeon, Republic of Korea | 102.39 km | Static | 7 d, 30 s |
| SHM2-SHM1 | Edinburgh, UK | 1528.09 m | Kinematic | 1 h, 10 Hz |
| SHM4-SHM1 | Edinburgh, UK | 1032.67 m | Kinematic | 1 h, 10 Hz |
| ROVE-RS01 | Wuhan, China | - | Kinematic | 16 m, 5 Hz |
| Models or Parameters | Strategies |
|---|---|
| Observations | Short baselines: L1+L2; Long baselines: IF combinations. The dual-frequency observations for different systems, GPS: L1/L2, BDS: B1/B2, GLONASS: G1/G2, Galileo: E1/E5a |
| Signals and tracking modes processed | The tracking approaches for the bands are sorted in the ascending order of selecting priority, and each tracking mode is represented by one letter [24]: GPS L1/L2: C S L X W GLONASS G1/G2: C P Galileo E1: C X Galileo E5a: I Q X BDS B1/B2: I Q X |
| Cutoff elevation | 10° |
| A priori tropospheric zenith dry/wet delays | Provided by Saastamoinen model [25]. The meteorological parameters are provided by GPT2w model [26]. The mapping function is GMF [27]. |
| Tropospheric parameters | The initial value is zero. The a priori standard deviation is 0.1 m and the variance between epochs is simulated by random walk process, with density 9 × 10−8 m2/s. |
| PCO and PCV | GNSS satellites and receiver antennas follow igs14_2029.atx |
| Weighting scheme | Elevation dependent model with , where presents the elevation of satellite. |
| Ephemeris | BRDM combined broadcast ephemeris. |
| Baselines | Strategy | Sessions (DOY) | ||||||
|---|---|---|---|---|---|---|---|---|
| 83 | 84 | 85 | 86 | 87 | 88 | 89 | ||
| CUTA-CUT0 | L1+L2 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 |
| KIRU-KIR0 | L1+L2 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 |
| PERT-CUT0 | L1+L2 | 93.24 | 95.83 | 96.32 | 96.96 | 97.88 | 95.95 | 96.18 |
| PERT-CUT0 | IF | 90.00 | 93.38 | 94.53 | 95.76 | 96.53 | 93.65 | 94.40 |
| NNOR-PERT | IF | 91.93 | 93.33 | 92.52 | 91.40 | 92.34 | 92.89 | 90.96 |
| GAMG-DAEJ | IF | 92.16 | 94.48 | 90.41 | 92.54 | 91.43 | 94.33 | 91.58 |
| SHM2-SHM1 | L1+L2 | 100.00 (114) | ||||||
| SHM4-SHM1 | L1+L2 | 96.20 (114) | ||||||
| ROV1-RS01 | L1+L2 | 71.76 (88) | ||||||
| Baselines and Directions | Session (DOY) | |||||||
|---|---|---|---|---|---|---|---|---|
| 83 | 84 | 85 | 86 | 87 | 88 | 89 | ||
| CUTA-CUT0 (L1+L2, 8.42 m) | N | 1.2 | 1.1 | 1.2 | 1.4 | 1.3 | 1.3 | 1.3 |
| E | 1.3 | 1.2 | 1.2 | 1.2 | 1.3 | 1.4 | 1.3 | |
| U | 3.0 | 2.8 | 2.9 | 3.2 | 3.0 | 3.3 | 3.0 | |
| KIRU-KIR0 (L1+L2, 4.47 km) | N | 3.4 | 3.5 | 2.6 | 3.9 | 3.7 | 3.9 | 2.9 |
| E | 3.0 | 2.6 | 2.2 | 3.4 | 3.5 | 3.4 | 3.0 | |
| U | 7.0 | 9.3 | 7.4 | 8.4 | 9.2 | 9.4 | 8.6 | |
| PERT-CUT0 (L1+L2, 22.41 km) | N | 5.5 | 7.7 | 8.3 | 7.8 | 10.3 | 9.0 | 6.8 |
| E | 5.4 | 5.2 | 5.1 | 6.4 | 5.0 | 5.1 | 5.2 | |
| U | 15.4 | 16.1 | 20.4 | 19.7 | 20.8 | 12.7 | 16.5 | |
| PERT-CUT0 (IF, 22.41 km) | N | 5.4 | 5.2 | 6.7 | 6.0 | 6.9 | 5.0 | 7.8 |
| E | 5.9 | 5.2 | 5.6 | 5.7 | 4.7 | 5.0 | 5.6 | |
| U | 17.5 | 14.6 | 17.6 | 21.3 | 22.0 | 15.3 | 22.4 | |
| NNOR-PERT (IF, 88.56 km) | N | 6.6 | 7.1 | 8.2 | 7.0 | 7.6 | 8.7 | 9.7 |
| E | 8.0 | 8.5 | 7.9 | 11.3 | 7.5 | 7.2 | 8.8 | |
| U | 34.8 | 32.2 | 43.1 | 39.2 | 31.8 | 41.3 | 43.9 | |
| GAMG-DAEJ (IF, 102.39 km) | N | 8.3 | 6.4 | 6.9 | 8.7 | 6.8 | 9.3 | 7.1 |
| E | 8.0 | 6.5 | 7.9 | 9.9 | 8.0 | 6.9 | 8.8 | |
| U | 28.2 | 25.5 | 28.3 | 32.9 | 32.3 | 39.0 | 33.5 | |
| Baselines | Observation | GPS | BDS | GLONASS | Galileo |
|---|---|---|---|---|---|
| CUTA-CUT0 | L1 | 4.1 | 3.9 | 5.8 | 4.1 |
| CUTA-CUT0 | L2 | 4.6 | 4.0 | 5.2 | 4.1 |
| KIRU-KIR0 | L1 | 7.5 | 7.5 | 8.6 | 7.9 |
| KIRU-KIR0 | L2 | 10.0 | 9.0 | 11.0 | 9.8 |
| PERT-CUT0 | L1 | 9.2 | 7.0 | 12.4 | 10.3 |
| PERT-CUT0 | L2 | 12.4 | 9.5 | 14.2 | 13.2 |
| PERT-CUT0 | IF | 12.8 | 10.1 | 14.8 | 13.9 |
| NNOR-PERT | IF | 14.9 | 13.0 | 17.3 | 17.0 |
| GAMG-DAEJ | IF | 12.6 | 13.3 | 14.7 | 13.4 |
| Stations | N | E | U |
|---|---|---|---|
| SHM2 | 0.15 | 0.075 0.268 0.342 | 0.104 0.205 0.268 |
| SHM4 | 0.104 0.15 0.18 | 0.18 | 0.18 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, R.; Chen, Q.; Meng, X.; Jiang, W.; An, X.; He, Q. A Multi-GNSS Differential Phase Kinematic Post-Processing Method. Remote Sens. 2020, 12, 2727. https://doi.org/10.3390/rs12172727
Xi R, Chen Q, Meng X, Jiang W, An X, He Q. A Multi-GNSS Differential Phase Kinematic Post-Processing Method. Remote Sensing. 2020; 12(17):2727. https://doi.org/10.3390/rs12172727
Chicago/Turabian StyleXi, Ruijie, Qusen Chen, Xiaolin Meng, Weiping Jiang, Xiangdong An, and Qiyi He. 2020. "A Multi-GNSS Differential Phase Kinematic Post-Processing Method" Remote Sensing 12, no. 17: 2727. https://doi.org/10.3390/rs12172727
APA StyleXi, R., Chen, Q., Meng, X., Jiang, W., An, X., & He, Q. (2020). A Multi-GNSS Differential Phase Kinematic Post-Processing Method. Remote Sensing, 12(17), 2727. https://doi.org/10.3390/rs12172727