LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring



Abstract

1. Introduction
2. Related Work
3. Problem Formulation
- -
- A satellite-based solution requires considerable power and is very expensive due to image data acquisition and processing.
- -
- Satellite-based sensor data acquisition is a high-cost and high-energy solution and therefore, is used only to acquire data from a few locations or those of concern.
- -
- Present WSN technology using a short-range wireless link, such as ZigBee or Wi-Fi, requires a large number of sensor nodes for extensive coverage.
- -
- A WSN with a long-range wireless link, such as LoRa and Sigfox, may reduce the sensor node count. However, this requires a large number of base stations, as most of the water resources have no or inadequate cellular coverage. This will eventually increase the cost.
- -
- A large number of sensor nodes and base stations will require complicated multi-hop data routing. It is not cost effective in terms of energy cost effective or resource requirements, and may induce latency for some wireless technology, such as LoRa.
- -
- Finally, the lack of or poor unavailability of cellular data coverage, including the NB-IoT for widely distributed water resources, is a bottleneck for IoT connectivity.
4. Proposed Solution
- Selection of wireless communication technology; and
- Lightweight dynamic communication protocol.
4.1. Selection of Wireless Communication Technology
4.2. Lightweight Dynamic Communication Protocol
- -
- Each SN and DS has its unique fixed ID;
- -
- All the SNs are homogeneous in terms of resource and residual energy;
- -
- The SN is static, and the DS is static or mobile;
- -
- All SNs and the DS transmit their signals at a fixed transmit power; and
- -
- The mobile DS travel path is well planned prior to data acquisition.
4.3. Timing Model
4.4. Energy Model
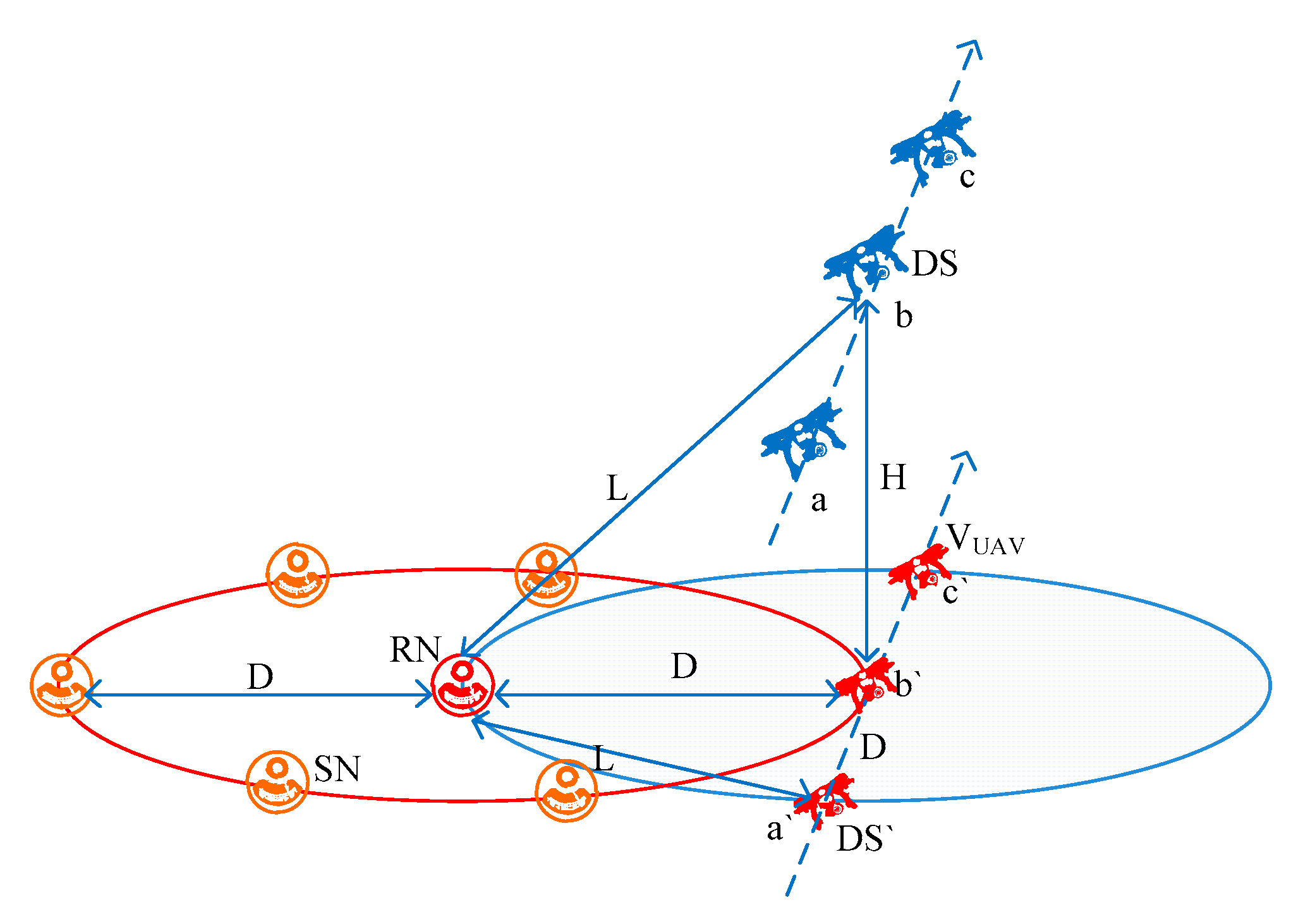
4.5. Mobility Model
- -
- UAV altitude is 3.5 km for a 5 km LoRa link;
- -
- UAV maximum ground speed = 50 km/hr = 13.8 m/s = 833 m/min; and
- -
- The data transfer ratio through the repeater node = 100%.
4.6. WSN Dimensioning
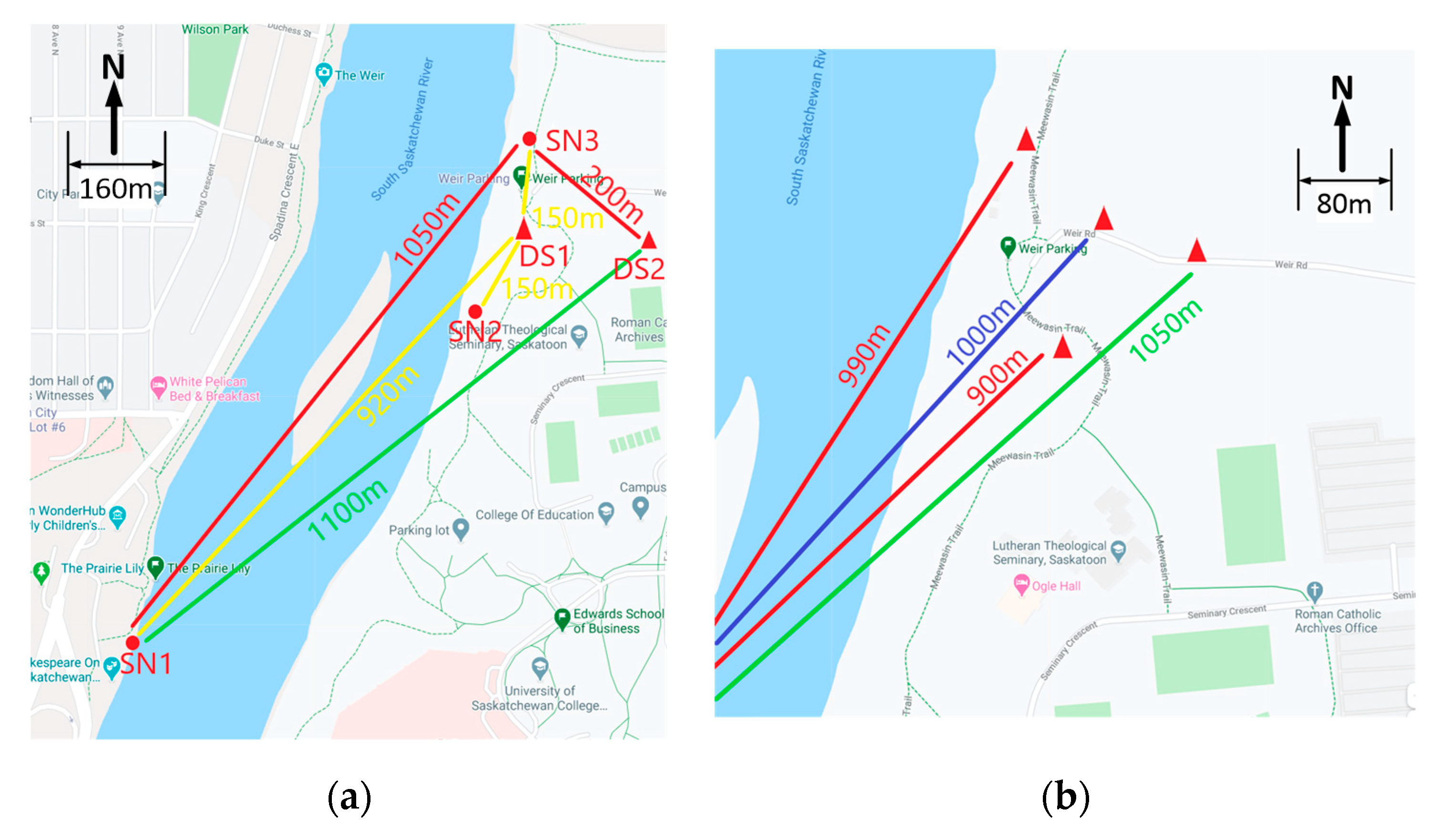
5. Field trial and Validation
5.1. Hardware Implementation
5.2. Experimental Setup
6. Performance Analysis
6.1. Functional Performance
6.2. Network Performance
6.3. Energy Performance
6.4. Timing Performance
6.5. Features and Comparison
- Unlike the UAV-mounted SNs or multi-hop static WSN, a mobile DS can increase the monitoring area coverage significantly. The proposed LDAP can acquire the sensor data using the mobile DS mounted on an UAV for most of the WARM applications where ground mobility may not be possible. UAV-based mobility is not possible for the SNs with short-range wireless links [1], as described in Section 3, due to the required altitude of the UAV; hence, long-range wireless connectivity is required. Moreover, multi-hop routing used for the traditional WSN may not be suitable for the mobile DS due to the routing complexity of the dynamic network topology.
- A mobile data sink is more energy efficient than a mobile sensor node, as the number of DSs is much lower than that of the SNs that would be required to cover the same area being monitored. The energy required to facilitate mobility to the SN or DS depends highly on the type of vehicle (or other means) used is not considered. However, for the same type of mobility, a WSN using a mobile DS requires significantly lower energy compared with the WSN with a mobile SN. For a static SN with a static BS, there is no energy required for mobility; however, it may incur other costs due to the high number of BSs. Unlike image-based data acquisition, WARM applications do not require continuous streaming and the SNs can store data over time. The stored data can be transmitted when a wireless link is established with the DS, and in this way, the SN can acquire sensor data at a rate as high as 1-min intervals and transmit it at 60-min intervals using the proposed LDAP.
- In terms of coverage, the number of mobile SNs is reduced compared to the static SNs; however, it may lose data coherence over time, which can be overcome by using static SNs associated with a mobile DS.
- Most of the routing optimization, clustering, and cluster head election in the WSN is performed using the residual energy and location of the SNs to keep the energy consumption of the SNs uniform (using a smaller cluster size closer to the DS) over the WSN. However, most of these procedures do not consider the environmental impact on the wireless signal quality, and require high processing resources and energy for the SNs, or use heterogeneous nodes (special nodes with higher energy consumption and capacity). The proposed LDAP can select direct RN-based data transmission, based on the residual energy, RSSI, and SNR of the SNs. Therefore, it is more immune to the environmental impact on the wireless signal quality and can maintain the energy balance among the SNs with very low energy consumption due to its light weight.
- Moreover, most of the present cluster-based WSNs use multiple hops for data transfer, which require maintaining a static network topology or a complex routing optimization for any changes of topology due to the relocation of the BS. In contrast, the proposed LDAP does not depend on the network topology, as it uses direct or single-hop data transmission from the SNs to the mobile DS.
- Present WSNs require complex clustering and routing algorithms to improve the efficiency of overall energy consumption. The complexity and processing load of this type of algorithm demand an additional resource (such as a high-speed processor and extra memory), which introduces energy overhead and cost. It makes the deployment of the WSN complicated and reduces scalability. On the other hand, the proposed LDAP uses only direct and single-hop data transfer, which is lightweight and suitable for resource-constrained sensor nodes. In addition, it reduces the deployment and expansion overhead in WSN implementations.
7. Conclusions and Future Scope
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Arjunan, S.; Sujatha, P. A survey on unequal clustering protocols in Wireless Sensor Networks. J. KSU Comput. Inf. Sci. 2019, 31, 304–317. [Google Scholar] [CrossRef]
- Gharaei, N.; Al-Otaibi, Y.; Butt, S.; Sahar, G.; Rahim, S. Energy-Efficient and Coverage-Guaranteed Unequal-Sized Clustering for Wireless Sensor Networks. IEEE Access 2019, 7, 1–9. [Google Scholar] [CrossRef]
- Bagci, H.; Yazici, A. An energy aware fuzzy unequal clustering algorithm for wireless sensor networks. IEEE Int. Conf. Fuzzy Syst. 2010, 1–8. [Google Scholar] [CrossRef]
- Mugo, R.; Waswa, R.; Nyaga, J.W.; Ndubi, A.; Adams, E.C.; Flores-Anderson, A.I. Quantifying Land Use Land Cover Changes in the Lake Victoria Basin Using Satellite Remote Sensing: The Trends and Drivers between 1985 and 2014. Remote Sens. 2020, 12, 2829. [Google Scholar] [CrossRef]
- Feng, Q.; Yang, J.; Liu, Y.; Ou, C.; Zhu, D.; Niu, B.; Liu, J.; Li, B. Multi-Temporal Unmanned Aerial Vehicle Remote Sensing for Vegetable Mapping Using an Attention-Based Recurrent Convolutional Neural Network. Remote Sens. 2020, 12, 1668. [Google Scholar] [CrossRef]
- Kimberly Mullen, C.P.G. “Information on Earth’s water”, National Ground Water Association. Available online: https://www.ngwa.org/what-is-groundwater/About-groundwater/information-on-earths-water (accessed on 18 September 2020).
- Szumińska, D.; Czapiewski, S.; Goszczyński, J. Changes in Hydromorphological Conditions in an Endorheic Lake Influenced by Climate and Increasing Water Consumption, and Potential Effects on Water Quality. Water 2020, 12, 1348. [Google Scholar] [CrossRef]
- Liu, S.; Ye, Q.; Wu, S.; Stive, M.J.F. Wind Effects on the Water Age in a Large Shallow Lake. Water 2020, 12, 1246. [Google Scholar] [CrossRef]
- Magnússona, R.; Cammeraata, E.; Lückeb, A.; Jansena, B.; Zimmerc, A.; Rechartec, J. Influence of glacial sediments on the chemical quality of surface water in the Ulta valley, Cordillera Blanca, Peru. Elsevier J. Hydrol. 2020, 587, 1–16. [Google Scholar] [CrossRef]
- Kim, S.U.; Yu, X. Analysis of Dam Inflow Variation Using the Hydrological Sensitivity Method in a Trans-Boundary River Basin: Case Study in the Korean Peninsula. Water 2019, 11, 395. [Google Scholar] [CrossRef]
- Mena-Rivera, L.; Vásquez-Bolaños, O.; Gómez-Castro, C.; Fonseca-Sánchez, A.; Rodríguez-Rodríguez, A.; Sánchez-Gutiérrez, R. Ecosystemic Assessment of Surface Water Quality in the Virilla River: Towards Sanitation Processes in Costa Rica. Water 2018, 10, 845. [Google Scholar] [CrossRef]
- Singh, G.; Saraswat, D.; Sharpley, A. A Sensitivity Analysis of Impacts of Conservation Practices on Water Quality in L’Anguille River Watershed, Arkansas. Water 2018, 10, 443. [Google Scholar] [CrossRef]
- Caballero, I.; Stumpf, R.P.; Meredith, A. Preliminary Assessment of Turbidity and Chlorophyll Impact on Bathymetry Derived from Sentinel-2A and Sentinel-3A Satellites in South Florida. Remote Sens. 2019, 11, 645. [Google Scholar] [CrossRef]
- Carstens, D.; Amer, D. Spatio-temporal analysis of urban changes and surface water quality: Use of in-situ, GIS and satellite images for WQM. Elsevier J. Hydrol. 2019, 569, 720–734. [Google Scholar] [CrossRef]
- Kabir, S.M.I.; Ahmari, H. Evaluating the effect of sediment color on water radiance and suspended sediment concentration using digital imagery. Elsevier J. Hydrol. 2020, 589, 1–11. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Wang, Z.; Wang, Z.; Zhou, X.; Cao, L. Monitoring of Urban Black-Odor Water Based on Nemerow Index and Gradient Boosting Decision Tree Regression Using UAV-Borne Hyperspectral Imagery. Remote Sens. 2019, 11, 2402. [Google Scholar] [CrossRef]
- Judah, A.; Hu, B. The Integration of Multi-source Remotely-Sensed Data in Support of the Classification of Wetlands. Remote Sens. 2019, 11, 1537. [Google Scholar] [CrossRef]
- Olatinwo, S.O.; Joubert, T.H. Enabling Communication Networks for Water Quality Monitoring Applications—A Survey. IEEE Access 2019, 7, 100332–100362. [Google Scholar] [CrossRef]
- Khan, A.; Ali, I.; Ghani, A.; Khan, N.; Alsaqer, M.; Rahman, A.U.; Mahmood, H. Routing Protocols for Underwater Wireless Sensor Networks: Taxonomy, Research Challenges, Routing Strategies and Future Directions. Sensors 2018, 18, 1619. [Google Scholar] [CrossRef]
- Wang, X.; Cheng, G.; Sun, Q.; Xu, J.; Zhang, H.; Yu, J.; Wang, L. An event-driven energy-efficient routing protocol for water quality sensor networks. Wirel. Netw. 2020, 1–12. [Google Scholar] [CrossRef]
- Du, R.; Gkatzikis, L.; Fischione, C.; Xiao, M. Energy Efficient Sensor Activation for Water Distribution Networks Based on Compressive Sensing. IEEE J. Sel. Areas Commun. 2015, 33, 2997–3010. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Y.; Liu, W.; Sangaiah, A.; Kim, H. Energy Efficient Routing Algorithm with Mobile Sink Support for Wireless Sensor Networks. Sensors 2019, 19, 1494. [Google Scholar] [CrossRef]
- Thiruchelvi, A.; Karthikeyan, N. Pair-based sink relocation and route adjustment in mobile sink WSN integrated IoT. IET Commun. 2020, 14, 365–375. [Google Scholar] [CrossRef]
- Bouguera, T.; Diouris, J.-F.; Chaillout, J.-J.; Jaouadi, R.; Andrieux, G. Energy Consumption Model for Sensor Nodes Based on LoRa and LoRaWAN. Sensors 2018, 18, 2104. [Google Scholar]
- Kim, J.; Song, J. A Secure Device-to-Device Link Establishment Scheme for LoRaWAN. IEEE Sens. J. 2018, 18, 2153–2160. [Google Scholar] [CrossRef]
- Marais, J.M.; Malekian, R.; Mahfouz, A.M.A. Evaluating the LoRaWAN Protocol Using a Permanent Outdoor Testbed. IEEE Sens. J. 2019, 19, 4726–4733. [Google Scholar] [CrossRef]
- Lee, H.C.; Ke, K.H. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System-Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar]
- Qin, Z.; Liu, Y.; Li, G.Y.; McCann, J.A. Performance Analysis of Clustered LoRa Networks. IEEE Trans. Veh. Technol. 2019, 68, 7616–7629. [Google Scholar]
- Zhu, G.; Liao, C.; Sakdejayont, T.; Lai, I.; Narusue, Y.; Morikawa, H. Improving the Capacity of a Mesh LoRa Network by Spreading-Factor Based Network Clustering. IEEE Access 2019, 7, 21584–21596. [Google Scholar] [CrossRef]
- Valencia, J.B.; Londono, L.C.; Viloria, D.M.; Garcia, M.R. Data Reduction in a Low-Cost Environmental Monitoring System Based on LoRa for WSN. IEEE Internet Things J. 2019, 6, 3024–3030. [Google Scholar] [CrossRef]
- Lee, J.Y.; Lee, W.; Kim, H.; Kim, H. Adaptive TCP Transmission Adjustment for UAV Network Infrastructure. Appl. Sci. 2020, 10, 1161. [Google Scholar] [CrossRef]
- Tan, X.; Zuo, Z.; Su, S.; Guo, X.; Sun, X.; Jiang, D. Performance Analysis of Routing Protocols for UAV Communication Networks. IEEE Access 2020, 8. [Google Scholar] [CrossRef]
- Baek, J.; Han, S.; Han, Y. Energy-Efficient UAV Routing for Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2019, 69, 1741–1750. [Google Scholar] [CrossRef]
- Popescu, D.; Dragana, C.; Stoican, F.; Ichim, L.; Stamatescu, G. A Collaborative UAV-WSN Network for Monitoring Large Areas. Sensors 2018, 18, 4202. [Google Scholar] [CrossRef]
- Cao, H.; Guo, Z.; Wang, S.; Cheng, H.; Zhan, C. Intelligent Wide-Area Water Quality Monitoring and Analysis System Exploiting Unmanned Surface Vehicles and Ensemble Learning. Water 2020, 12, 681. [Google Scholar] [CrossRef]
- Esakki, B.; Ganesan, S.; Mathiyazhagan, S.; Ramasubramanian, K.; Gnanasekaran, B.; Son, B.; Park, S.W.; Choi, J.S. Design of Amphibious Vehicle for Unmanned Mission in Water Quality Monitoring Using Internet of Things. Sensors 2018, 18, 3318. [Google Scholar] [CrossRef]
- Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B.; Sharp, J.L. Evaluation of a UAV-Assisted Autonomous Water Sampling. Water 2018, 10, 655. [Google Scholar] [CrossRef]
- Lima, R.L.P.; Boogaard, F.C.; de Graaf-van Dinther, R.E. Innovative Water Quality and Ecology Monitoring Using Underwater Unmanned Vehicles: Field Applications, Challenges and Feedback from Water Managers. Water 2020, 12, 1196. [Google Scholar] [CrossRef]
- Pham, T.N.; Ho, A.P.H.; Nguyen, T.V.; Nguyen, H.M.; Truong, N.H.; Huynh, N.D.; Nguyen, T.H.; Dung, L.T. Development of a Solar-Powered IoT-Based Instrument for Automatic Measurement of Water Clarity. Sensors 2020, 20, 2051. [Google Scholar] [CrossRef]
- Mirzavand, R.; Honari, M.M.; Laribi, B.; Khorshidi, B.; Sadrzadeh, M.; Mousavi, P. An Unpowered Sensor Node for Real-Time Water Quality Assessment (Humic Acid Detection). Electronics 2018, 7, 231. [Google Scholar] [CrossRef]
- Demetillo, A.T.; Japitana, M.V.; Taboada, E.B. A system for monitoring water quality in a large aquatic area using wireless sensor network technology. Springer Sustain. Environ. Res. 2019, 29, 12–21. [Google Scholar]
- Bisio, I.; Marchese, M. Efficient Satellite-Based Sensor Networks for Information Retrieval. IEEE Syst. J. 2008, 2, 464–475. [Google Scholar] [CrossRef]
- Flores-Díaz, A.C.; Quevedo Chacón, A.; Páez Bistrain, R.; Ramírez, M.I.; Larrazábal, A. Community-Based Monitoring in Response to Local Concerns: Creating Usable Knowledge for Water Management in Rural Land. Water 2018, 10, 542. [Google Scholar] [CrossRef]
- Thatoe Nwe Win, T.; Bogaard, T.; van de Giesen, N. A Low-Cost Water Quality Monitoring System for the Ayeyarwady River in Myanmar Using a Participatory Approach. Water 2019, 11, 1984. [Google Scholar] [CrossRef]
- Yang, B.; Lai, C.; Chen, X.; Wu, X.; He, Y. Surface Water Quality Evaluation Based on a Game Theory-Based Cloud Model. Water 2018, 10, 510. [Google Scholar] [CrossRef]
- Grzywna, A.; Bronowicka-Mielniczuk, U. Spatial and Temporal Variability of Water Quality in the Bystrzyca River Basin, Poland. Water 2020, 12, 190. [Google Scholar] [CrossRef]
- Bhatti, E.-U.-H.; Khan, M.M.; Shah, S.A.R.; Raza, S.S.; Shoaib, M.; Adnan, M. Dynamics of Water Quality: Impact Assessment Process for Water Resource Management. Processes 2019, 7, 102. [Google Scholar] [CrossRef]
- Sackey, S.H.; Ansere, J.A.; Anajemba, J.H.; Kamal, M.; Iwendi, C. Energy Efficient Clustering Based Routing Technique in WSN Using Brain Storm Optimization. In Proceedings of the 15th International Conference on Emerging Technologies (ICET), Peshawar, Pakistan, 2–3 December 2019. [Google Scholar]
- Lee, J.; Kao, T. An Improved Three-Layer Low-Energy Adaptive Clustering Hierarchy for Wireless Sensor Networks. IEEE Internet Things J. 2016, 3, 951–958. [Google Scholar] [CrossRef]
- Popli, S.; Jha, R.K.; Jain, S. A Survey on Energy Efficient Narrowband Internet of things (NBIoT): Architecture, Application and Challenges. IEEE Access 2018, 7, 16739–16776. [Google Scholar] [CrossRef]
- Ayoub, W.; Samhat, A.E.; Nouvel, F.; Mroue, M.; Prévotet, J.C. Internet of Mobile Things: Overview of LoRaWAN, DASH7, and NB-IoT in LPWANs standards and Supported Mobility. IEEE Commun. Surv. Tutor. 2018, 21, 1561–1581. [Google Scholar] [CrossRef]
- Ikpehai, A.; Adebisi, B.; Rabie, K.; Anoh, K.; Ande, R.; Hammoudeh, M.; Gacanin, H.; Mbanaso, U. Low-Power Wide Area Network Technologies for Internet-of-Things: A Comparative Review. IEEE Internet Things J. 2018, 6, 2225–2240. [Google Scholar] [CrossRef]
- LoRaWAN™ 1.0.3 Specification, LoRa Alliance, Inc. 2018. Available online: https://lora-alliance.org/resource-hub/lorawanr-specification-v103 (accessed on 18 September 2020).
- Semtech SX1278. Available online: https://www.semtech.com/products/wireless-rf/lora-transceivers/sx1278 (accessed on 18 September 2020).
- LoRa Tools. Available online: https://www.loratools.nl/#/airtime (accessed on 18 September 2020).
- Zypher. Available online: https://www.airbus.com/defence/uav/zephyr.html (accessed on 18 September 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone | Dimension L × W (km × km) | Number of BSs Required | Number of SNs Required | Number of Hops Required | Energy Efficiency * (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Short- Range [1] | Long- Range [30] | LDAP | Short- Range [1] | Long- Range [30] | LDAP | Short- Range [1] | Long- Range [30] | LDAP | Short- Range [1] | Long- Range [30] | LDAP | ||
| 1 | 30 × 80 | 60 | 16 | 3 | 3000+ | 480 | 480 | 8 | 5 | 1 | 94.2 | 95.0 | 99.7 |
| 2 | 30 × 55 | 30 | 8 | 2 | 1000+ | 150 | 150 | 5 | 4 | 1 | 96.5 | 94.7 | 99.3 |
| 3 | 50 × 25 | 40 | 12 | 3 | 2000+ | 300 | 300 | 8 | 5 | 1 | 94.2 | 94.0 | 99.5 |
| 4 | 15 × 55 | 15 | 4 | 1 | 150+ | 50 | 50 | 8 | 5 | 1 | 71.2 | 88.5 | 99.0 |
| 5 | 10 × 25 | 6 | 2 | 1 | 100+ | 25 | 25 | 5 | 3 | 1 | 92.9 | 95.4 | 98.0 |
| Technology | Standard | Data Rate (bit/s) | Range (km) | Required Power |
|---|---|---|---|---|
| NB-IoT | 3GPP Cellular | 250 k | Urban 8, Rural > 25 | Low |
| LoRa | Proprietary | <50 k | Urban 5, Rural > 15 | Very Low |
| Sigfox | Proprietary | 100 | Urban 10, Rural 50 | Very Low |
| Ingenu | Proprietary | 20 | Urban 3, Rural 15 | Very Low |
| Dash7 | ISO/IEC 18000–7 | 13 k, 55 k, 200 k | 1–2 | Very Low |
| 6LoWPAN | IEEE 802.15.4 | Less than 250 k | <0.1 | Low |
| ZigBee | IEEE 802.15.4 | 20 k, 40 k, 250 k | <1 | Low |
| Wi-Fi | IEEE 802.15.11 | Up to 54 M | 0.2 | High |
| New Wi-Fi | IEEE 802.15.11ah | >150 k, <7.8 M | 1 | Low |
| Tag | Full Name | Values | Example |
|---|---|---|---|
| RT | Receiver Type | 1/2/3 | 1: sink, 2: RN, 3: node |
| RID | Receiver ID | 0001 to FFFF | Device ID (1 to 65535) |
| ST | Sender Type | 1/2/3 | 1: sink, 2: RN, 3: node |
| SID | Sender ID | 0001 to FFFF | Device ID (1 to 65535) |
| MID | Message ID | 1–4 | 1: Req., 2: Ack., 3: Data, 4: Conf., 5: Init. |
| SQN | Msg. seq. number | 1 | 0–255 (binary) |
| PLT | Payload Type | 0/1 | 0: last block, 1: multi-block |
| PLL | Payload Length | 1–245 | 8 bit data stream |
| PL | Payload | Binary/ASCII | Sensor data with date-time |
| EOM | End of message | 0/1 | 0: Last packet, 1: Continuous packet |
| Symbol | Description | Value |
|---|---|---|
| SF | Spreading Factor | 7 |
| BW | Bandwidth (kHz) | 250 |
| CR | Code Rate | 1 |
| nPR | Preamble length | 8 |
| H | Explicit Header Enable (0: enable) | 1 |
| CRC | Cyclic Redundancy Check Enable (1: enable) | 0 |
| D | Low data-rate enable (0: disable) | 0 |
| UCH | LoRa channel utilization | 10% |
| TOAmax | Time On Air (TOA) at maximum payload size of 245 bytes | 197.25 ms |
| TOAmin | TOA at minimum payload size of 16 bytes | 33.41 ms |
| Event | Duration (mS) | Voltage (V) | Current (mA) | Power (mW) | Energy (mJ) |
|---|---|---|---|---|---|
| Active | TAC = 2407 | 5.01 | 31 | PAC = 155.31 | EAC = 373.83 |
| LoRa Rx | TRX = 336 | 5.01 | 44 | PRX = 220.44 | ERX = 74.07 |
| LoRa Tx | TTX = 135 | 5.00 | 148 | PTX = 740.00 | ETX = 99.90 |
| Full cycle | 2878 | 547.80 |
| Proposed LDAP | Remote Node [42] | Vehicle-Mounted [35,36,37,38] | Conventional WSN [39,40,41] | |
|---|---|---|---|---|
| SN type | Static | Static | Mobile | Static |
| Network topology | Dynamic | Static star | Static Star | Static Star/tree |
| DS type | Static/mobile | Static | Static | Static/relocatable BS |
| Routing hop | Direct, single hop | Direct | Direct | Single/multi-hop |
| Energy consumption | Low | Low | High | Medium |
| Wireless interface | LoRa | Satellite | - | ZigBee and other |
| Coverage | Wider coverage using UAV mounted DS | Small coverage for static SN | Limited coverage using only mobile SNs | Wider coverage using a large number of nodes |
| Processing overhead | Very low | NA | NA | Moderate to High |
| Deployment complexity | Low | Moderate | Moderate | Moderate to High |
| Features | Low cost, low power | Low cost, less coverage | High cost, | Need network planning or optimization |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, G.M.E.; Wahid, K.A. LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring. Remote Sens. 2020, 12, 3131. https://doi.org/10.3390/rs12193131
Rahman GME, Wahid KA. LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring. Remote Sensing. 2020; 12(19):3131. https://doi.org/10.3390/rs12193131
Chicago/Turabian StyleRahman, Gazi M. E., and Khan A. Wahid. 2020. "LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring" Remote Sensing 12, no. 19: 3131. https://doi.org/10.3390/rs12193131
APA StyleRahman, G. M. E., & Wahid, K. A. (2020). LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring. Remote Sensing, 12(19), 3131. https://doi.org/10.3390/rs12193131