Calibration of Industrial Cameras for Aerial Photogrammetric Mapping



Abstract
1. Introduction
1.1. Motivation
- The calibration test field should be placed in the company’s hangar while not limiting its working area; and
- Reprojection error (RE) of the calibration should not exceed 0.3 pixel.
1.2. State of the Art in Camera Calibration
- —focal length;
- —principal point position;
- —additional parameters;
- —coordinates of object point (after rotation and shift to camera frame);
- —point radius in the image plane.
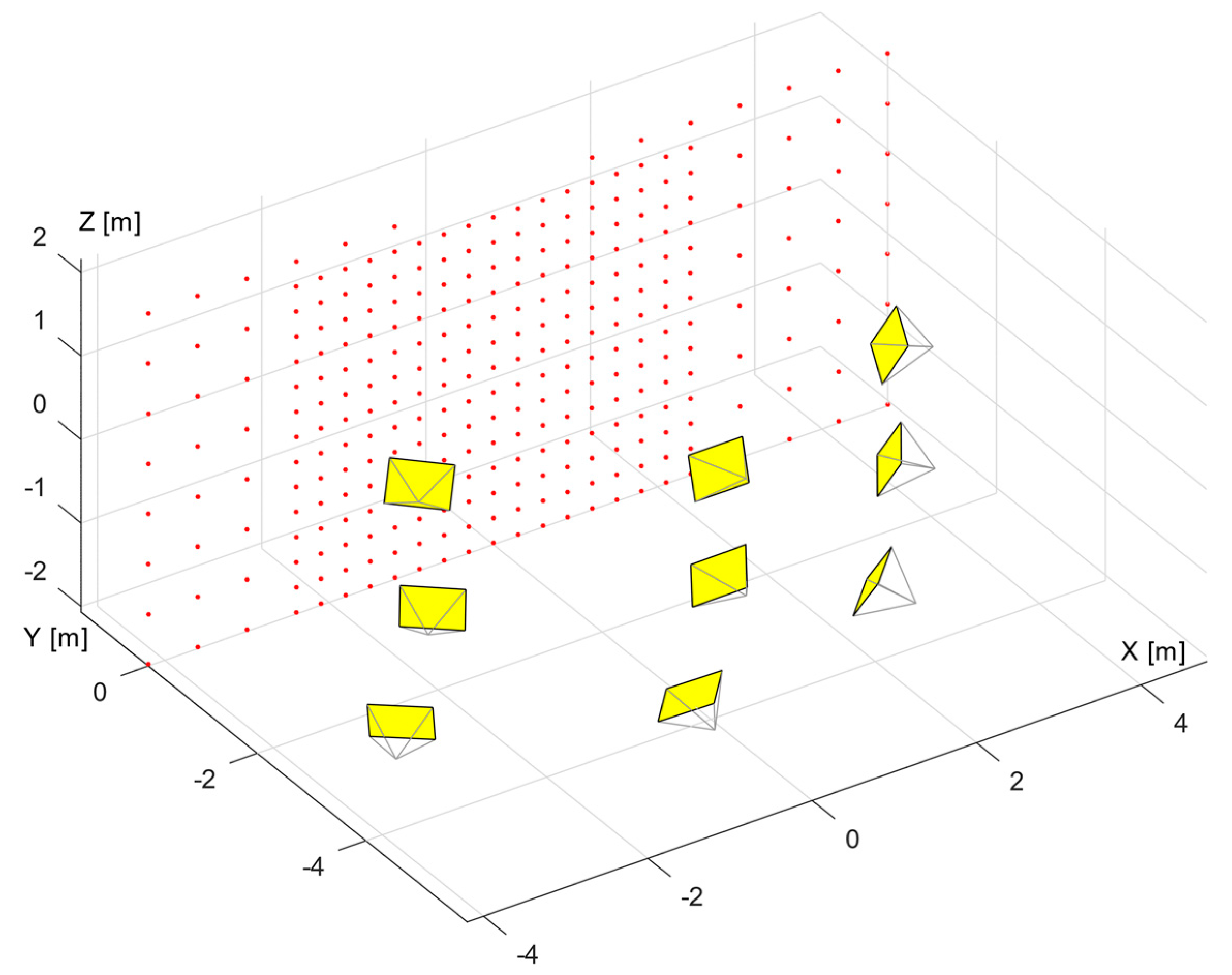
- The desired network should include various angles, positions, and points of view.
- There should be a variation in the scale of the images. In the case of a 2-D calibration test field, this means including multiple side-views.
- The comprehensive and unsystematic coverage of camera frames with points is required due to distortions’ poor extrapolation properties.
- A large number of images and control points are needed for high observational redundancy.
- No a priori accuracy of control points can be provided by the user.
- No a priori accuracy of image measurements can be provided as well.
- Tie points are not allowed.
- Using checkpoints is feasible but requires an additional portion of code.
- Correlation values for unknowns are unavailable to the user.
- There is no interface to handle loss function, so the user is left to deal with gross errors on his own.
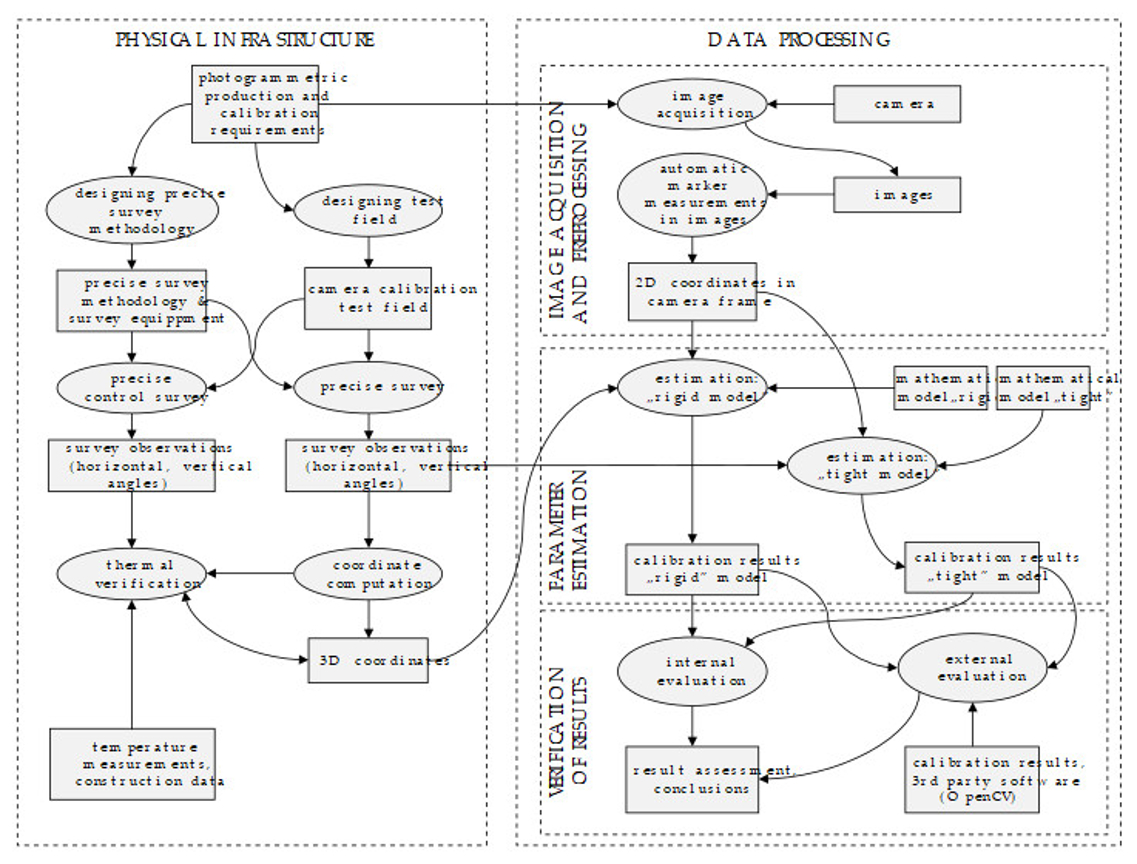
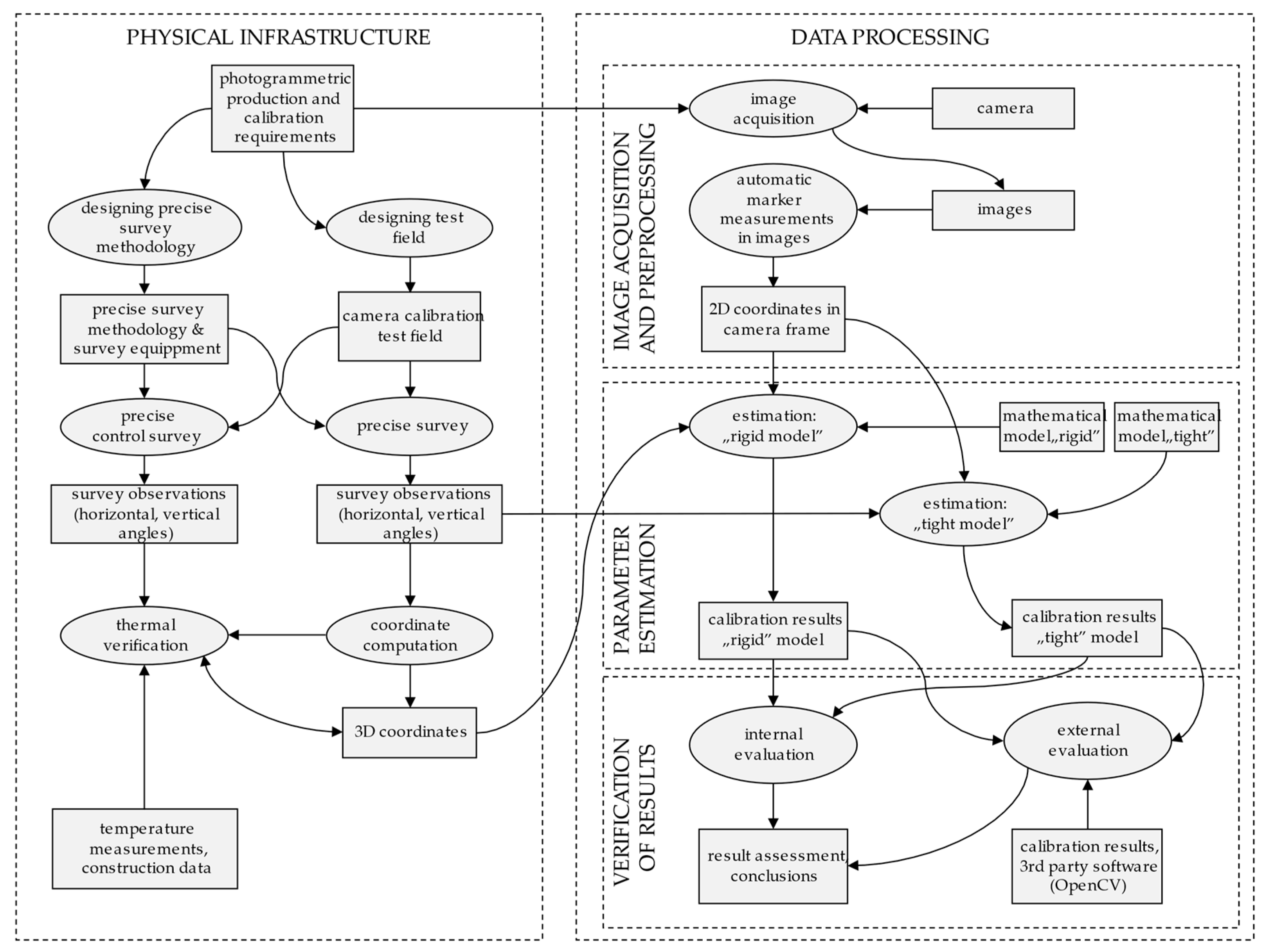
2. Methodology Overview
3. Physical Infrastructure
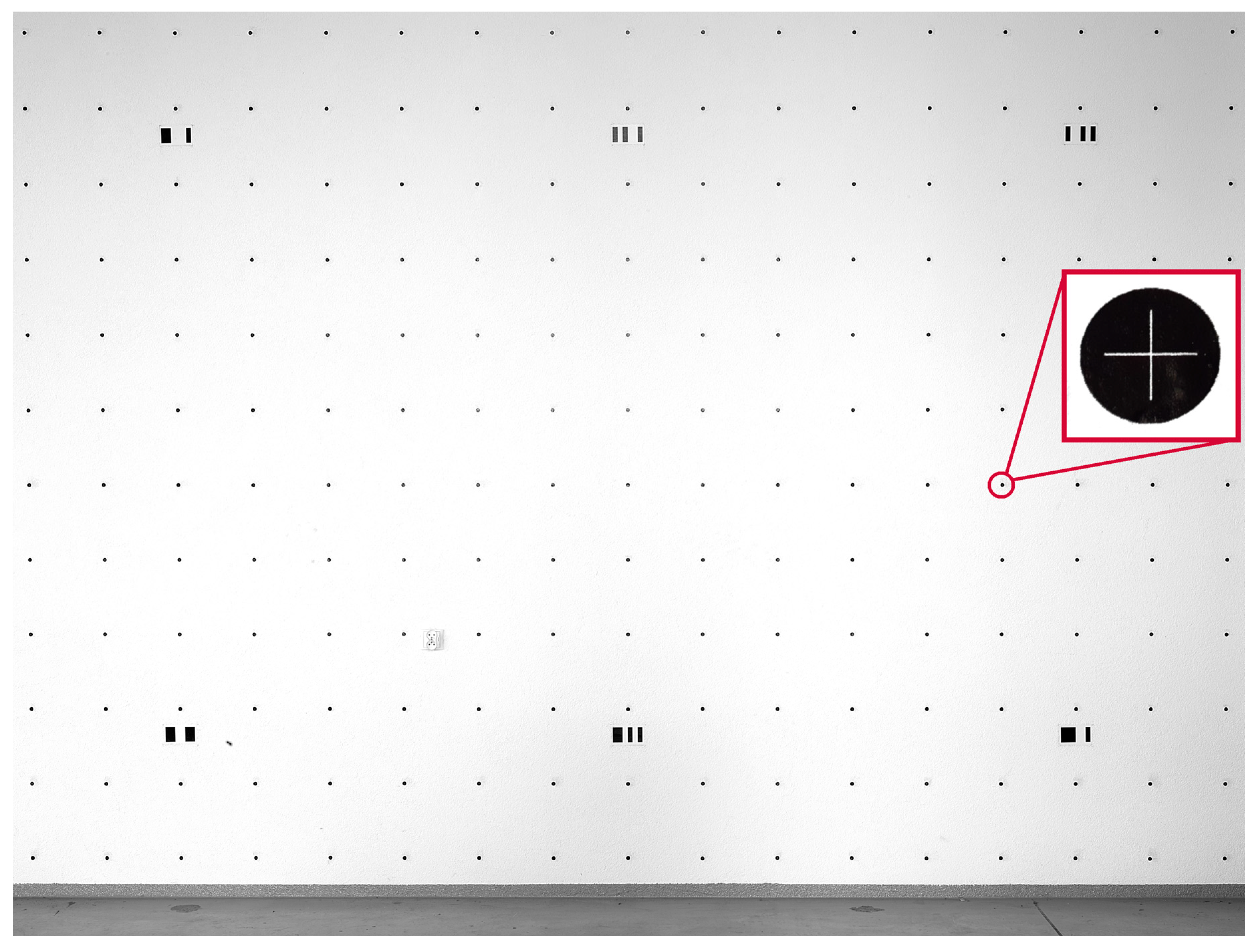
3.1. Design of Calibration Test Field
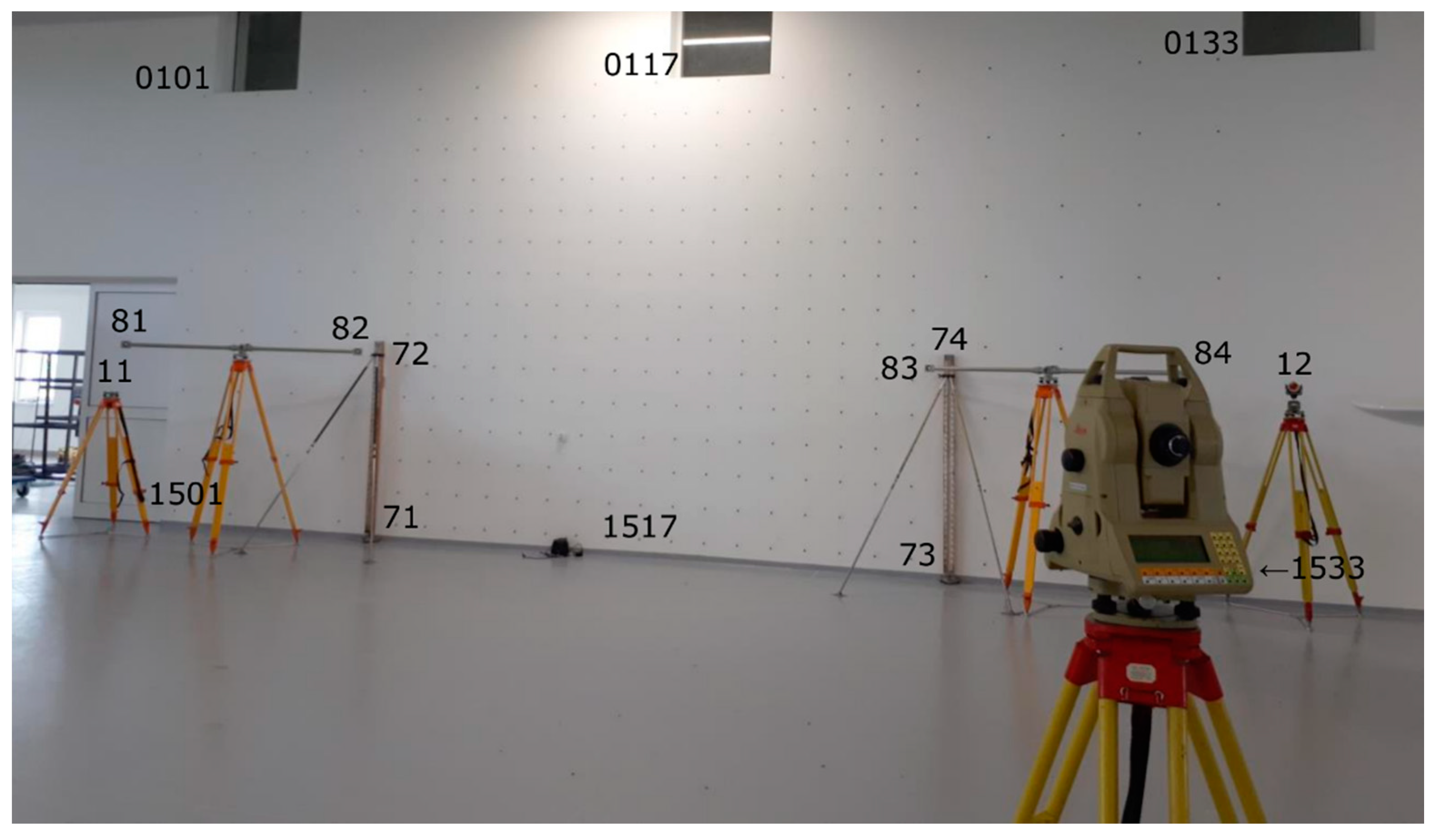
3.2. Survey of the Calibration Test
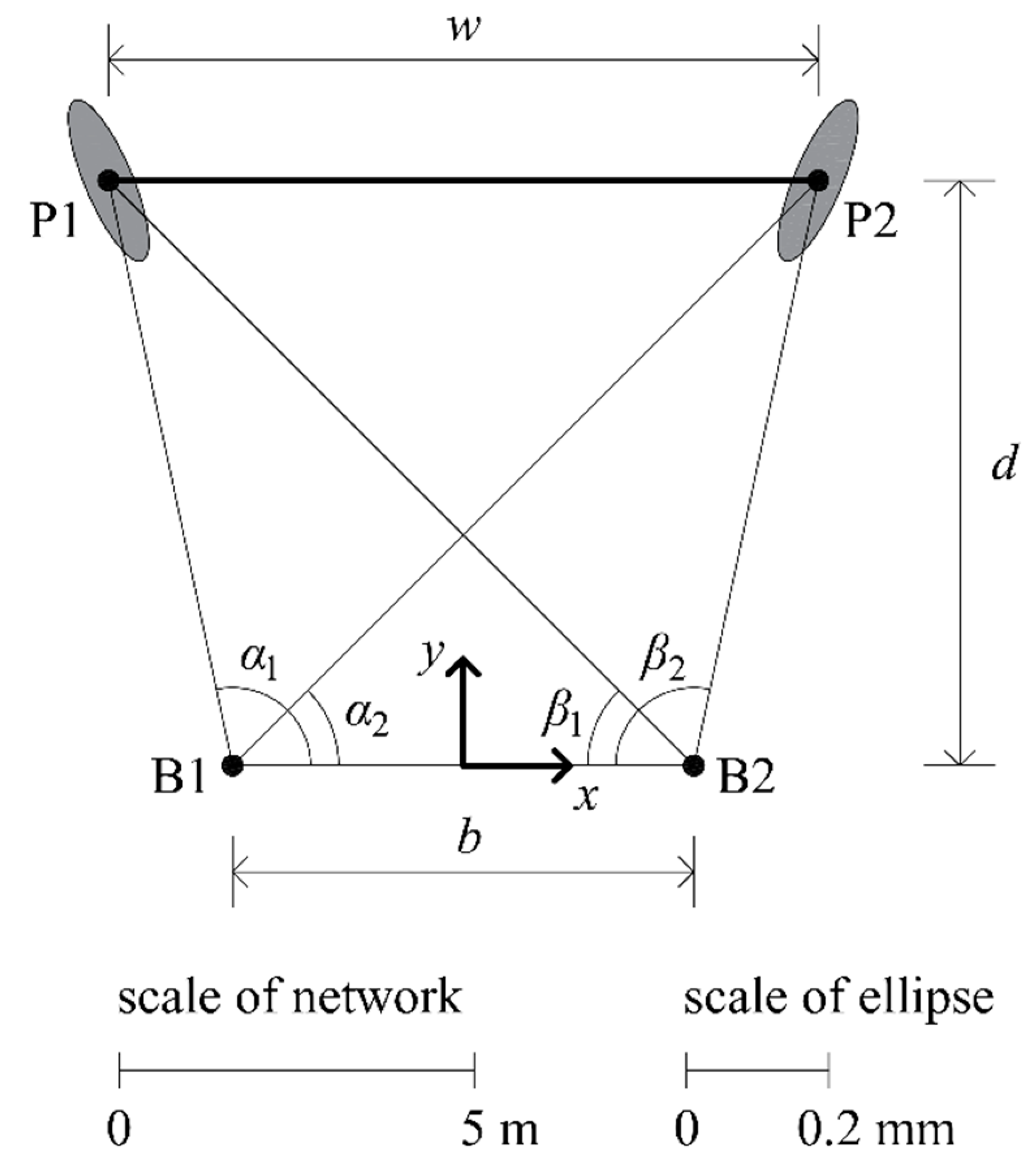
3.3. Evaluation of Measurement Accuracy
- V—the volume of the parallelepiped defined by three vectors——that is given by the absolute value of the scalar triple product:taking into account these three vectors are not coplanar due to the measurement error.
- the area of the parallelogram defined by two vectors , which is given by the magnitude of the cross-product:
- —a vector representing the base, i.e., connecting the two observation stations B1 and B2; and
- —a vector lying on the sight axis relative to position s (s = B1, B2), i.e., on the straight line connecting the station and the marker
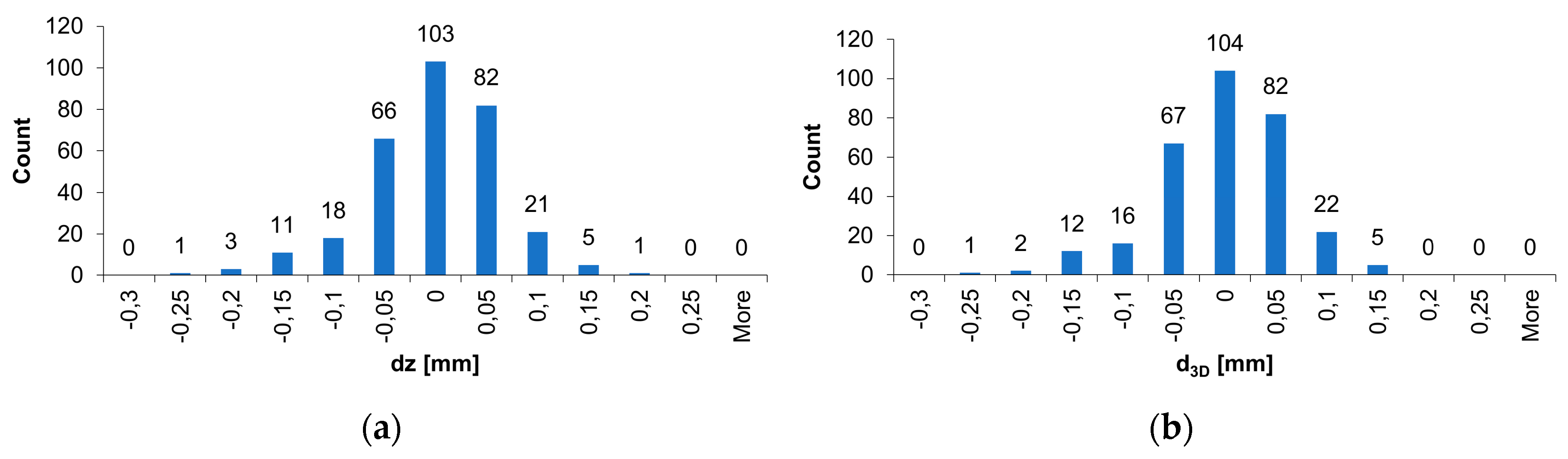
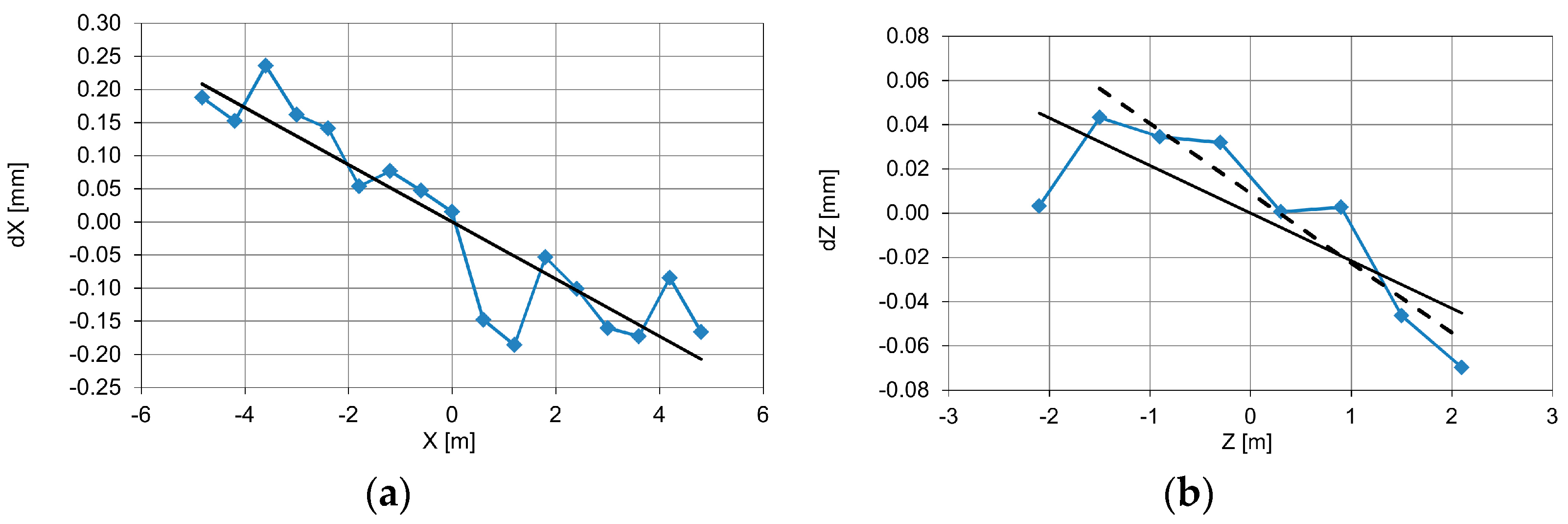
3.4. Thermal Deformations of the Calibration Test Field
4. Data Processing
4.1. Mathematical Model
- is the vector of coordinates of the center of projection of the images, with each vertical vector .
- is the vector representing the orientation of I images, where each vertical vector is composed of Euler angles and forms the rotation matrix . The z-x-z (α-ν-κ) rotation sequence [27] was used as it properly conditions bundles with an inclination of cameras calling in −45° to + 45° range.
- represents IO parameters of a pinhole camera, a principal point coordinates (x0, y0), and a focal length (f) of the calibrated camera; thus,
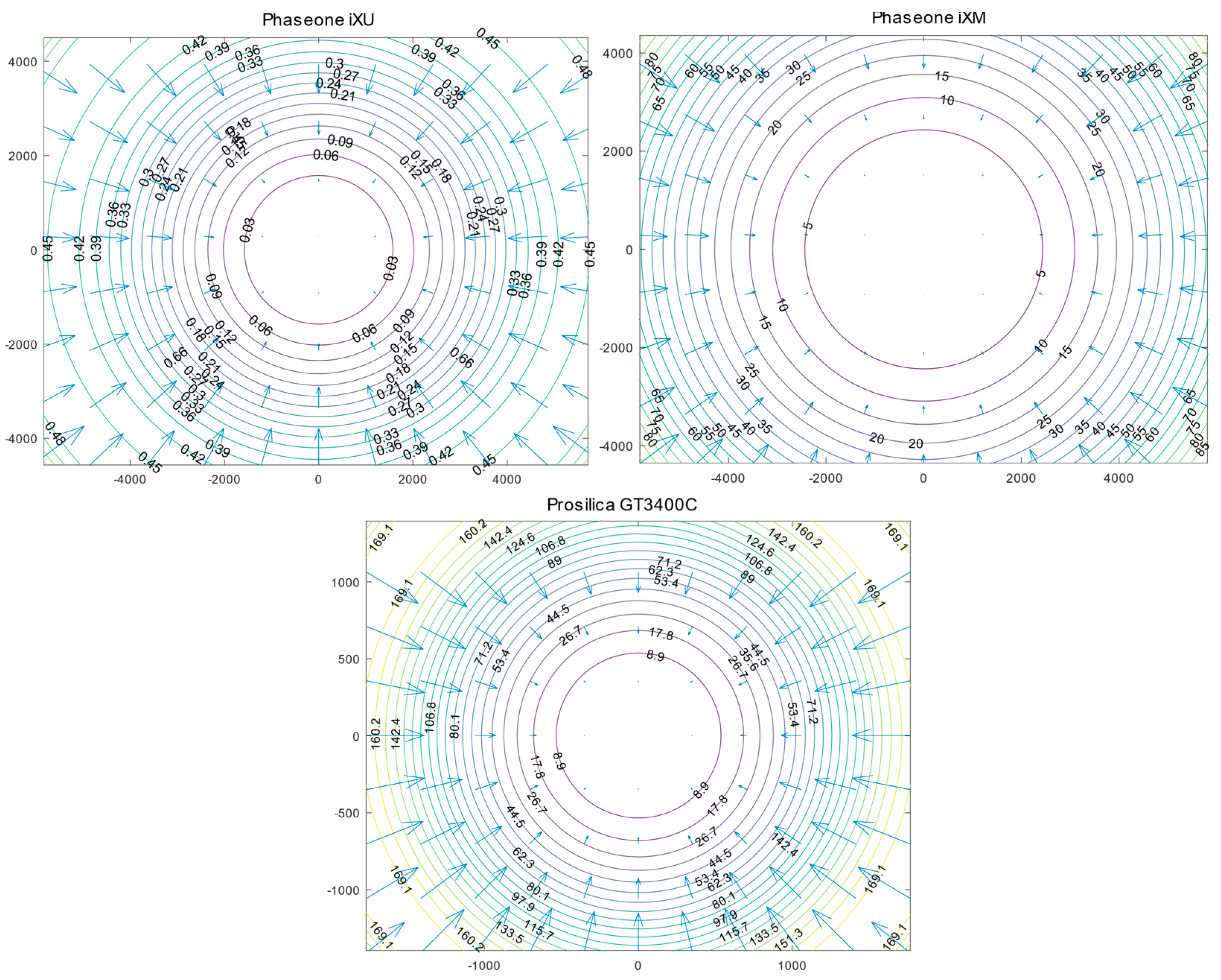
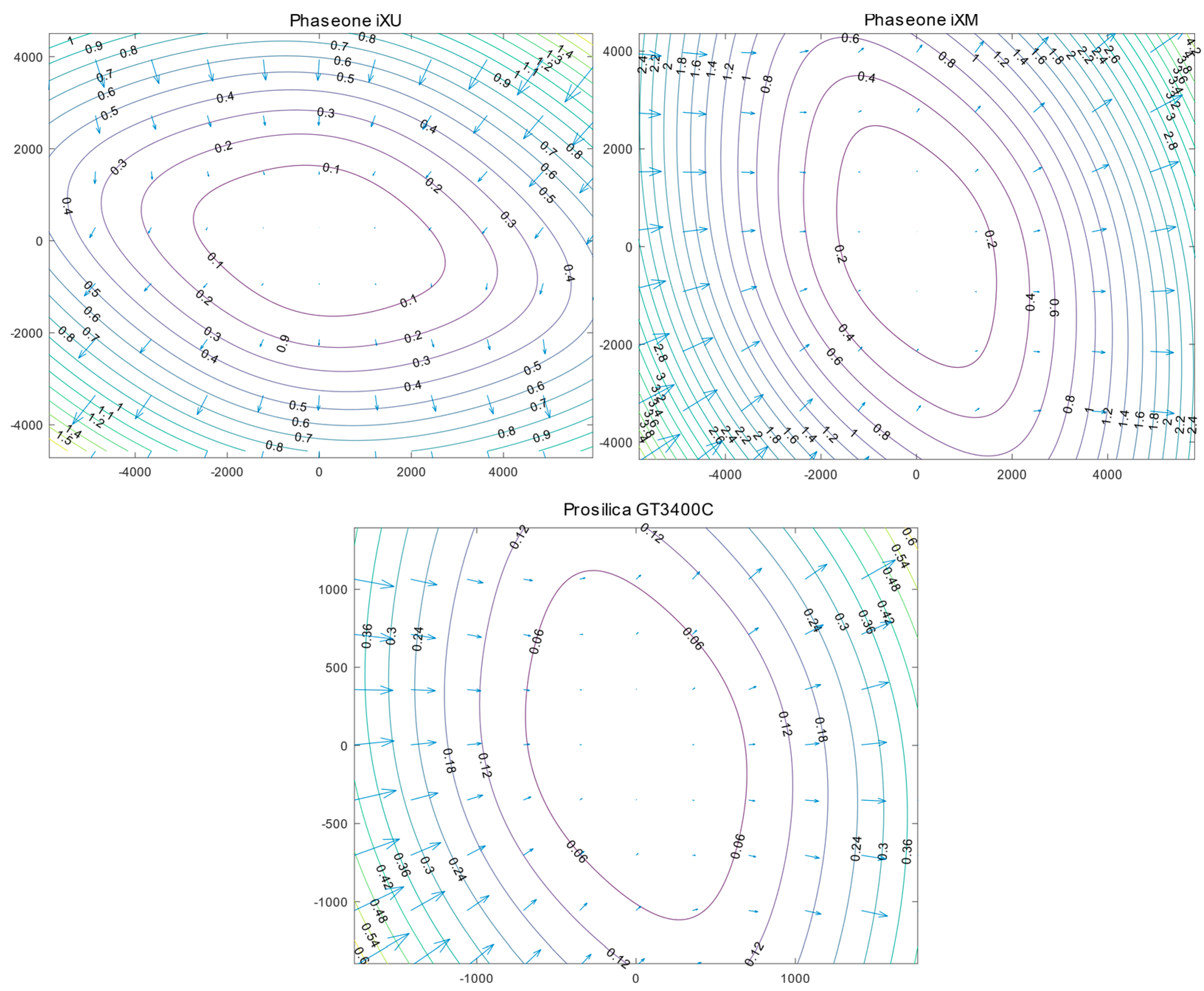
- represents the vector of coefficients of camera distortion with up to five elements, three radial (k) + two tangential (p) (decentering) coefficients.
- is the vector of J control points, with each vector .
- is the image measurements of the -th control point to -th image:where:
- , , are elements of a homogenous vector: and , are corrections for distortion.
- represents tachymetric measurements of the horizontal angles to the -th control point from station with reference (tie) to station l:
- are tachymetric measurements of the vertical angles to -th control point from station :where: is the slant distance, and k and l correspond either to station B1 or B2 () as shown in Figure 3, whose coordinates were determined by geodetic measurement and free adjustment of the geodetic network.
- and ,
- and ,
- and ,
4.2. Software Implementation
5. Experimental Results
5.1. Experiment Design
- RE;
- Root mean square errors (RMSE) for check points;
- Standard deviation of parameters; and
- Correlation coefficients.
- Comparison of results between examined models (rigid and tight); and
- Comparing parameters obtained using proposed models with those obtained using 3rd party software (OpenCV library).
5.2. Involved Sensors and Data Acquisition
5.3. Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Remondino, F.; Fraser, C. Digital Camera Calibration Methods: Considerations and Comparisons. Symp. Image Eng. Vis. Metrol. 2006, 36, 266–272. [Google Scholar] [CrossRef]
- Grenzdörffer, G.J. Medium Format Digital Cameras—A EuroSDR Project. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1043–1050. [Google Scholar]
- Smith, M.J.; Cope, E. The Effects of Temperature Variation on Single-Lens-Reflex Digital Camera Calibration Parameters. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 554–559. [Google Scholar]
- Brown, D.C. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Fraser, C.S. Digital Camera Self-Calibration. ISPRS J. Photogramm. Remote Sens. 1997, 52, 149–159. [Google Scholar] [CrossRef]
- Luhmann, T.; Fraser, C.; Maas, H.G. Sensor Modelling and Camera Calibration for Close-Range Photogrammetry. ISPRS J. Photogramm. Remote Sens. 2016, 115, 37–46. [Google Scholar] [CrossRef]
- Fraser, C. Automatic Camera Calibration in Close Range Photogrammetry. Photogramm. Eng. 2013, 79, 381–388. [Google Scholar] [CrossRef]
- Tang, R.; Fritsch, D.; Cramer, M. New Rigorous and Flexible Fourier Self-Calibration Models for Airborne Camera Calibration. ISPRS J. Photogramm. Remote Sens. 2012, 71, 76–85. [Google Scholar] [CrossRef]
- Zhang, Z. A Flexible New Technique for Camera Calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Bacakoglu, H.; Kamel, M.S. A Three-Step Camera Calibration Method. IEEE Trans. Instrum. Meas. 1997, 46, 1165–1172. [Google Scholar] [CrossRef]
- Lucchese, L. Geometric Calibration of Digital Cameras through Multi-View Rectification. Image Vis. Comput. 2005, 23, 517–539. [Google Scholar] [CrossRef]
- Balletti, C.; Guerra, F.; Tsioukas, V.; Vernier, P. Calibration of Action Cameras for Photogrammetric Purposes. Sensors 2014, 14, 17471–17490. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Li, H.; Huang, Y.; Huang, J.; Li, P. A Novel Efficient Camera Calibration Approach Based on K-SVD Sparse Dictionary Learning. Measurement 2020, 159, 107798. [Google Scholar] [CrossRef]
- Puget, P.; Skordas, T. Calibrating a Mobile Camera. Image Vis. Comput. 1990, 8, 341–348. [Google Scholar] [CrossRef]
- Kraft, T.; Geßner, M.; Meiß, H.; Cramer, M.; Gerke, M.; Przybilla, H.J. Evaluation of a Metric Camera System Tailored for High Precision UAV Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 901–907. [Google Scholar] [CrossRef]
- Bradski, G.; Kaehler, A. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000, 25, 120–125. [Google Scholar]
- AgiSoft Metashape Professional 1.6.4. (Software); AgiSoft LCC: St. Petersburg, Russia, 2019.
- MATLAB 2019b (Software); The MathWorks: Natick, MA, USA, 2019.
- Han, S.; Park, J.; Lee, W. On-Site vs. Laboratorial Implementation of Camera Self-Calibration for UAV Photogrammetry. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2016, 34, 349–356. [Google Scholar] [CrossRef][Green Version]
- Mueller, C.; Neumann, K. Leica DMC III Calibration and Geometric Sensor Accuracy. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 40, 1–9. [Google Scholar] [CrossRef]
- Gruber, M.; Muick, M. UltraCam Eagle Prime Aerial Sensor Calibration and Validation. In Proceedings of the Imaging and Geospatial Technology Forum (IGTF 2016), Fort Wort, TX, USA, 11–15 April 2016. [Google Scholar]
- Stamatopoulos, C.; Fraser, C.S. Automated Target-Free Network Orientation and Camera Calibration. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 339–346. [Google Scholar] [CrossRef]
- Zhou, Y.; Rupnik, E.; Meynard, C.; Thom, C.; Pierrot-Deseilligny, M. Simulation and Analysis of Photogrammetric UAV Image Blocks: Influence of Camera Calibration Error. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 195–200. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating Systematic Error in Topographic Models Derived from UAV and Ground-Based Image Networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Filho, L.E.; Mitishita, E.A.; Kersting, A.P.B. Geometric Calibration of an Aerial Multihead Camera System for Direct Georeferencing Applications. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1926–1937. [Google Scholar] [CrossRef]
- Hastedt, H.; Rofallski, R.; Luhmann, T.; Rosenbauer, R.; Ochsner, D.; Rieke-Zapp, D. Prototypic Development and Evaluation of a Medium Format Metric Camera. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2018, 42, 441–448. [Google Scholar] [CrossRef]
- Kraus, K. Photogrammetry; Dümmler: Bonn, Germany, 1997. [Google Scholar]
- Fialovszky, L. Fundamental and Elements of Optics; Levels. In Surveying Instruments and Their Operational Principles; Elsevier: Amsterdam, The Netherlands, 1991. [Google Scholar]
- Wenhao, F. Control Work in Close Range Photogrammetry. Geo-Spat. Inf. Sci. 2001, 4, 66–72. [Google Scholar] [CrossRef][Green Version]
- Baertlein, H. Inside the Leica TCA2003. Prof. Surv. Mag. 1999, 19. [Google Scholar]
- Kolecki, J. Xtrel. 2020. Available online: https://github.com/kubakolecki/xtrel (accessed on 1 August 2020).
- Agarwal, S.; Mierle, K. Ceres Solver. 2020. Available online: http://ceres-solver.org (accessed on 1 January 2020).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | dX | dZ | dZ’ | Unit |
|---|---|---|---|---|
| m | −0.043 | −0.022 | −0.032 | mm/m |
| σm | ±0.015 | ±0.007 | ±0.005 | mm/m |
| df | 15 | 6 | 5 | |
| R2 | 0.83 | 0.63 | 0.90 | |
| ΔT | −8 | K | ||
| α | 5.4 | 2.7 | 3.9 | ppm/K |
| σα | ±1.9 | ±0.8 | ±0.6 | ppm/K |
| Model | ||
|---|---|---|
| Components | Rigid—Coordinates of control points could not be adjusted; they were kept fixed, which rendered the network more rigid. | Tight—This model provided the tight integration of photogrammetric and survey observations; it directly used survey angular observations. |
| Parameters | ||
| Types of equations | ||
| Camera | |||
|---|---|---|---|
| Phase One iXU-RS1000 100 MP | Phase One iXM 100 MP | Prosilica GT3400C | |
| Resolution [px] | 11,608 × 8708 | 11,664 × 8750 | 3384 × 2704 |
| Detector size [μm] | 4.60 | 3.76 | 3.69 |
| Nominal focal length [mm] | 70 | 40 | 6 |
| Phase One iXU-RS1000 | Phase One iXM | Prosilica GT3400C, 6 mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 100 MP, 70 mm | 100 MP, 40 mm | |||||||||
| OpenCV | Rigid | Tight | OpenCV | Rigid | Tight | OpenCV | Rigid | Tight | ||
| Camera parameters ±1σ | f | 15,225.20 | 15,225.15 | 15,223.49 | 11,118.75 | 11,118.67 | 11,118.90 | 1679.88 | 1686.65 | 1686.58 |
| * | ±0.67 | ±0.55 | * | ±0.27 | ±0.23 | * | ±0.20 | ±0.18 | ||
| x0 | −30.47 | −30.42 | −29.53 | −59.08 | −59.31 | −58.54 | 6.07 | 6.08 | 6.05 | |
| * | ±0.74 | ±0.83 | * | ±0.36 | ±0.37 | * | ±0.11 | ±0.10 | ||
| y0 | −10.07 | −8.93 | −8.45 | 10.84 | 10.84 | 11.70 | 40.14 | 40.30 | 40.41 | |
| * | ±0.59 | ±0.71 | * | ±0.29 | ±0.30 | * | ±0.10 | ±0.11 | ||
| Phase One iXU-RS1000 100 MP, 70 mm | Phase One iXM 100 MP, 40 mm | Prosilica GT3400C, 6 mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| OpenCV | rigid | tight | OpenCV | rigid | tight | OpenCV | rigid | tight | ||
| RE control points [px] | x | 0.39 | 0.39 | 0.16 | 0.37 | 0.37 | 0.16 | 0.34 | 0.38 | 0.30 |
| y | 0.35 | 0.34 | 0.22 | 0.31 | 0.31 | 0.21 | 0.28 | 0.30 | 0.26 | |
| RMSE check points [mm] | X | 0.11 | 0.11 | 0.13 | 0.11 | 0.10 | 0.12 | 0.38 | 0.18 | 0.08 |
| Y | 0.25 | 0.22 | 0.19 | 0.22 | 0.22 | 0.23 | 0.56 | 0.24 | 0.19 | |
| Z | 0.09 | 0.07 | 0.06 | 0.06 | 0.06 | 0.07 | 0.46 | 0.12 | 0.06 | |
| Phase One iXU-RS1000 | Phase One iXM | Prosilica GT3400C, 6 mm | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 100 MP, 70 mm | 100 MP, 40 mm | |||||||||||||||||||||||
| f | x0 | y0 | k1 | k2 | k3 | p1 | p2 | f | x0 | y0 | k1 | k2 | k3 | p1 | p2 | f | x0 | y0 | k1 | k2 | k3 | p1 | p2 | |
| f | 1 | 0.00 | −0.02 | −0.44 | 0.31 | −0.25 | −0.04 | −0.04 | 1 | 0.02 | 0.01 | −0.69 | 0.57 | −0.49 | 0.00 | 0.00 | 1 | −0.11 | 0.30 | −0.65 | 0.56 | −0.50 | −0.03 | −0.03 |
| x0 | 1 | 0.01 | 0.00 | 0.00 | 0.00 | 0.92 | 0.00 | 1 | −0.01 | −0.01 | 0.00 | 0.00 | 0.90 | −0.02 | 1 | −0.13 | 0.00 | 0.00 | 0.00 | 0.65 | −0.06 | |||
| y0 | 1 | 0.01 | −0.01 | 0.01 | 0.02 | 0.85 | 1 | 0.01 | −0.01 | 0.01 | −0.01 | 0.81 | 1 | −0.01 | 0.00 | 0.00 | −0.10 | 0.46 | ||||||
| k1 | 1 | −0.96 | 0.90 | 0.00 | 0.01 | 1 | −0.97 | 0.91 | 0.00 | 0.00 | 1 | −0.97 | 0.92 | −0.03 | −0.02 | |||||||||
| k2 | 1 | −0.98 | 0.00 | −0.01 | 1 | −0.98 | 0.00 | −0.01 | 1 | −0.99 | 0.03 | 0.00 | ||||||||||||
| k3 | 1 | 0.00 | 0.01 | 1 | 0.00 | 0.01 | 1 | −0.03 | 0.00 | |||||||||||||||
| p1 | 1 | 0.01 | 1 | −0.01 | 1 | −0.04 | ||||||||||||||||||
| p2 | 1 | 1 | 1 | |||||||||||||||||||||
| Phase One iXU-RS1000 100 MP, 70 mm | Phase One iXM 100 MP, 40 mm | Prosilica GT3400C, 6 mm | |
|---|---|---|---|
| x0 vs. α angle | [−0.90, −0.88] | [−0.88, −0.70] | [−0.77, −0.60] |
| y0 vs. ν angle | [+0.75, +0.79] | [+0.71, +0.90] | [+0.57, +0.73] |
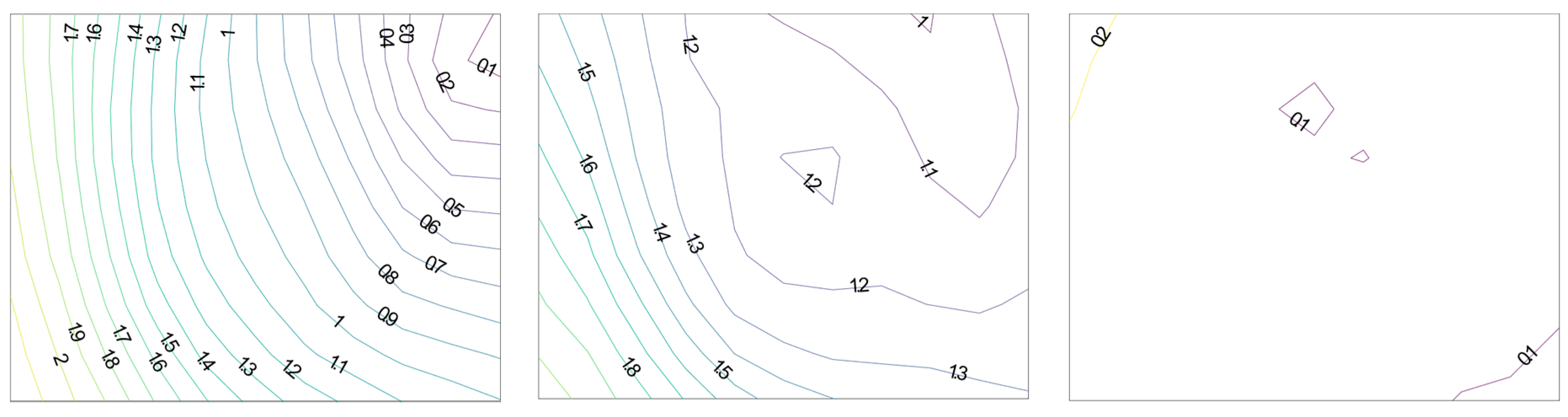
| Phase One iXU-RS1000 100 MP, 70 mm | Phase One iXM 100 MP, 40 mm | Prosilica GT3400C, 6 mm | |
|---|---|---|---|
| Δxymax [px] | 2.30 | 2.22 | 0.25 |
| Δxymean [px] | 1.17 | 1.35 | 0.13 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolecki, J.; Kuras, P.; Pastucha, E.; Pyka, K.; Sierka, M. Calibration of Industrial Cameras for Aerial Photogrammetric Mapping. Remote Sens. 2020, 12, 3130. https://doi.org/10.3390/rs12193130
Kolecki J, Kuras P, Pastucha E, Pyka K, Sierka M. Calibration of Industrial Cameras for Aerial Photogrammetric Mapping. Remote Sensing. 2020; 12(19):3130. https://doi.org/10.3390/rs12193130
Chicago/Turabian StyleKolecki, Jakub, Przemysław Kuras, Elżbieta Pastucha, Krystian Pyka, and Maciej Sierka. 2020. "Calibration of Industrial Cameras for Aerial Photogrammetric Mapping" Remote Sensing 12, no. 19: 3130. https://doi.org/10.3390/rs12193130
APA StyleKolecki, J., Kuras, P., Pastucha, E., Pyka, K., & Sierka, M. (2020). Calibration of Industrial Cameras for Aerial Photogrammetric Mapping. Remote Sensing, 12(19), 3130. https://doi.org/10.3390/rs12193130