Assessing the Influence of UAV Altitude on Extracted Biophysical Parameters of Young Oil Palm

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. Study Area
3. Materials and Methods
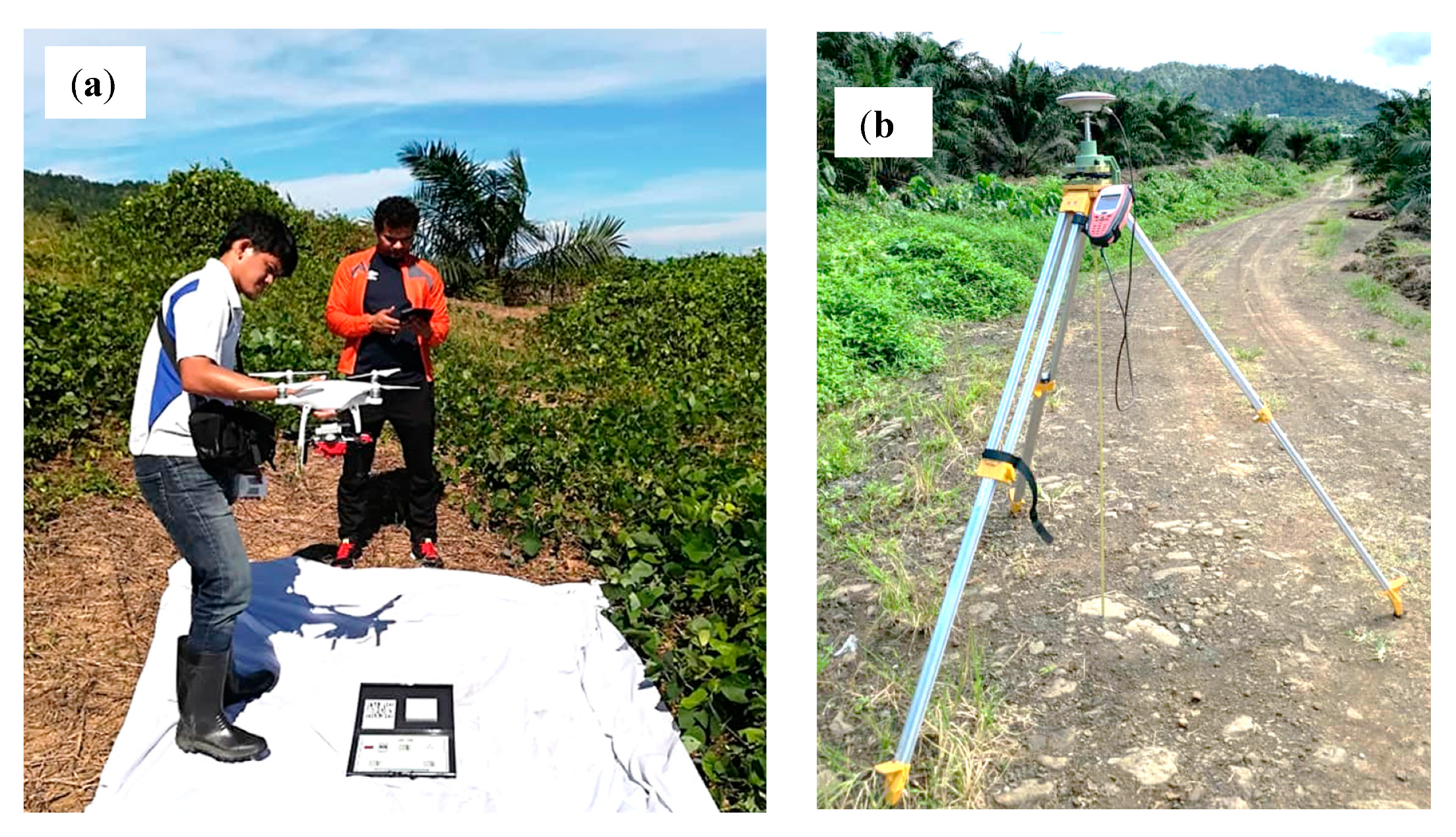
3.1. Aerial Imaging Tools and Data Collections
3.2. Data Processing
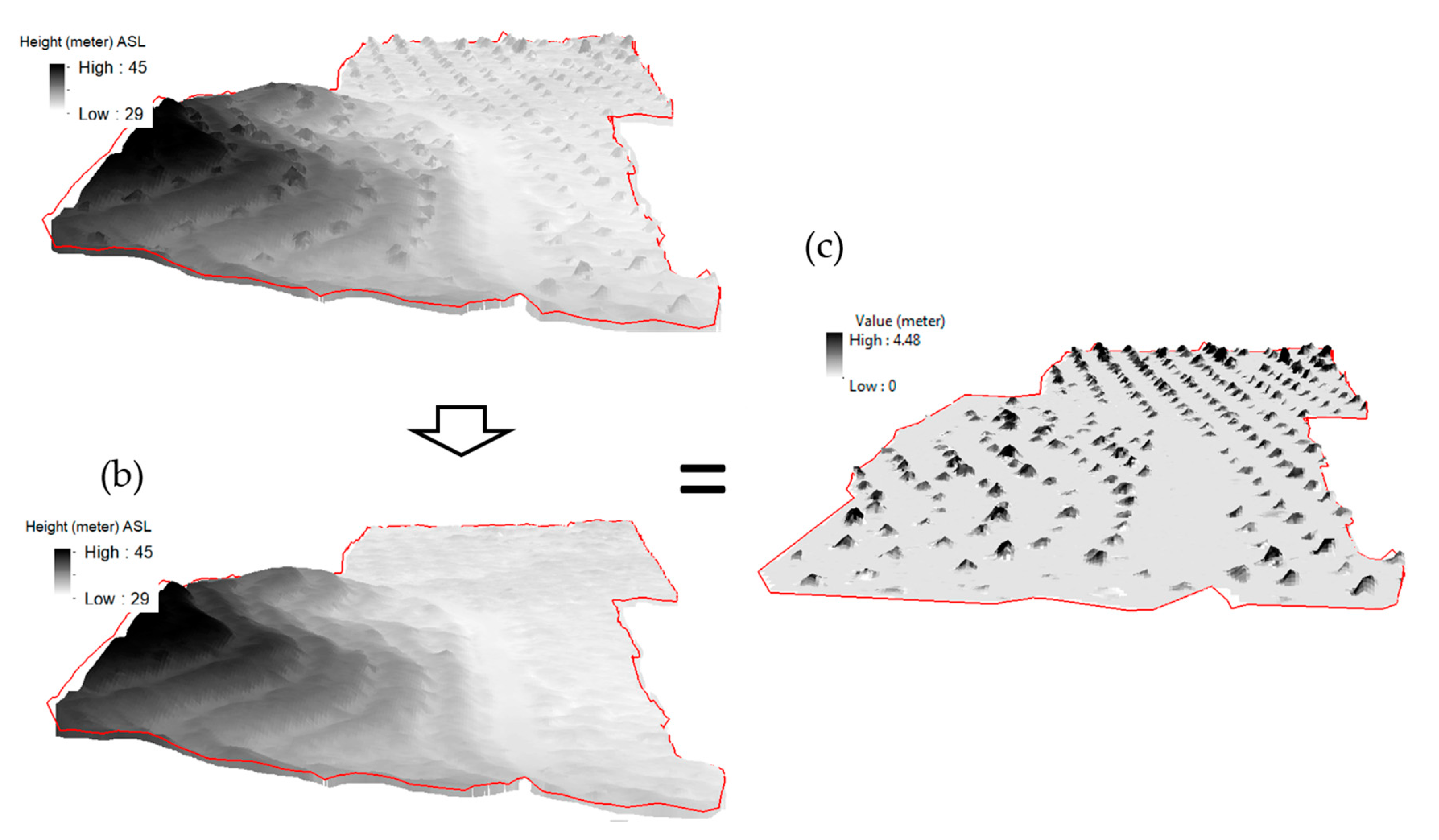
3.2.1. Classifications of Point Clouds and Production of DSM and DEM
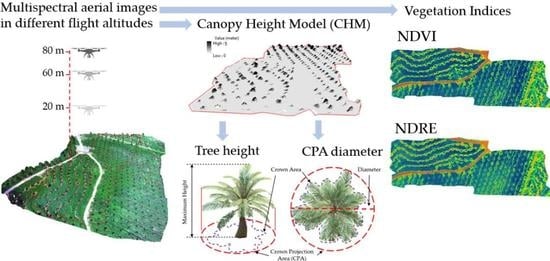
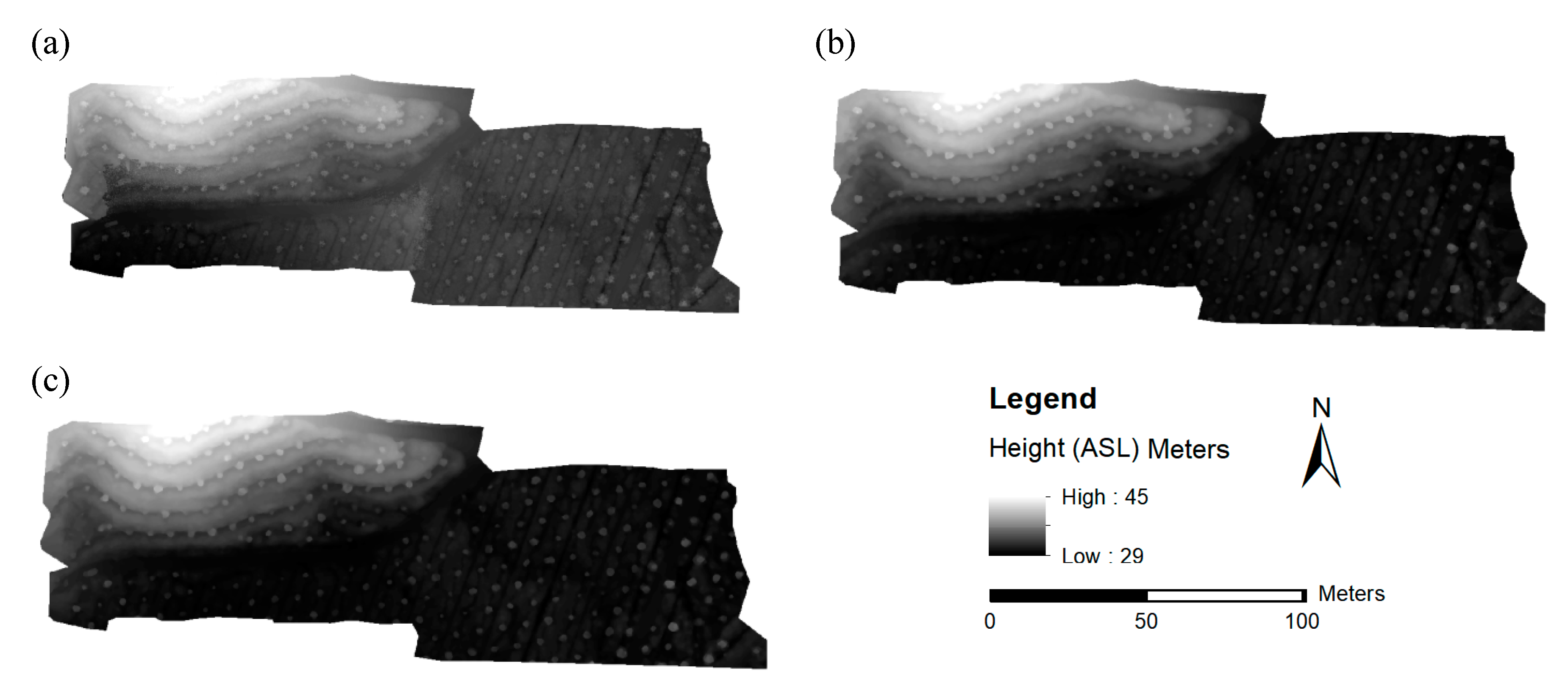
3.2.2. Production of Canopy Height Model (CHM)
3.2.3. Height, Crown Area, and Crown Projection Area (CPA)
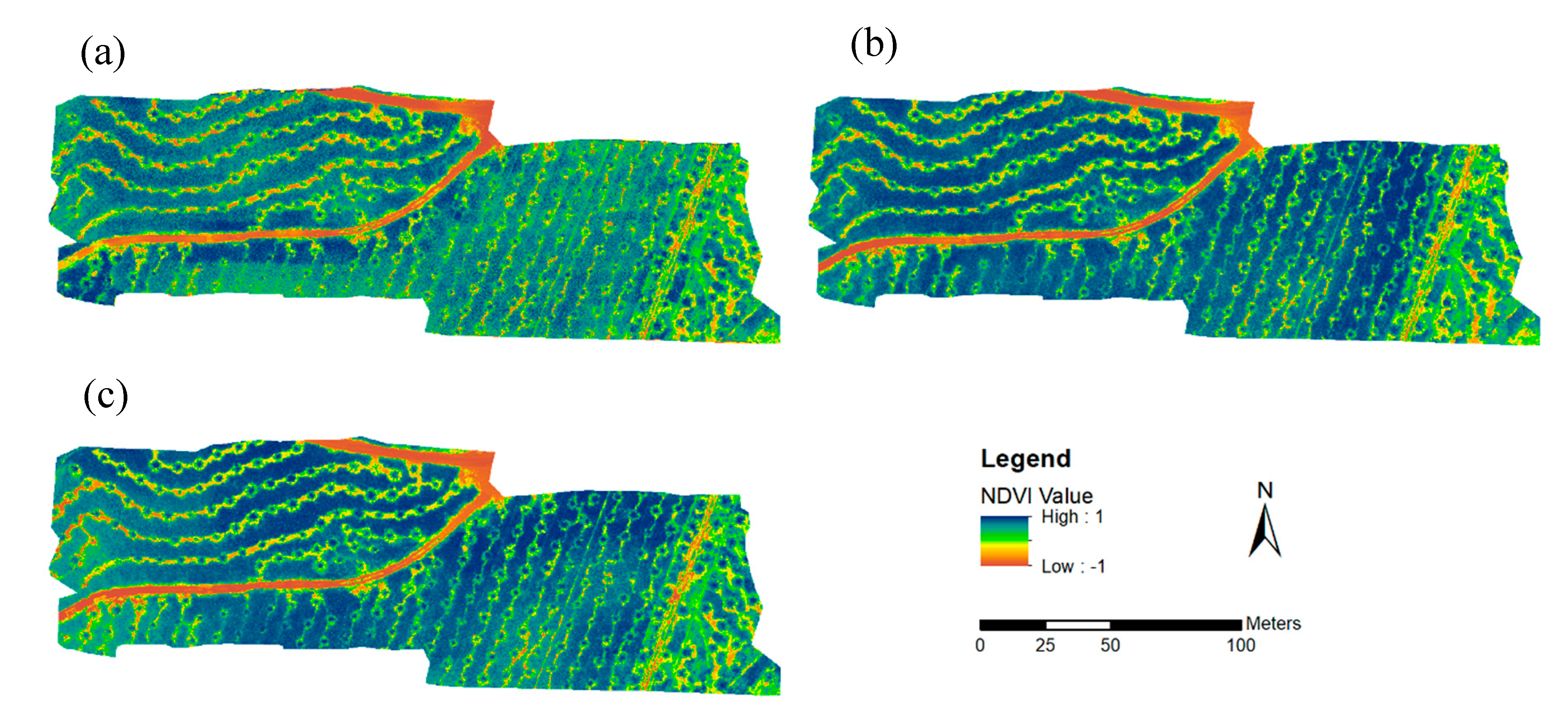
3.2.4. Vegetation Indices (NDVI and NDRE) Transformations
3.3. Data Analysis
4. Results
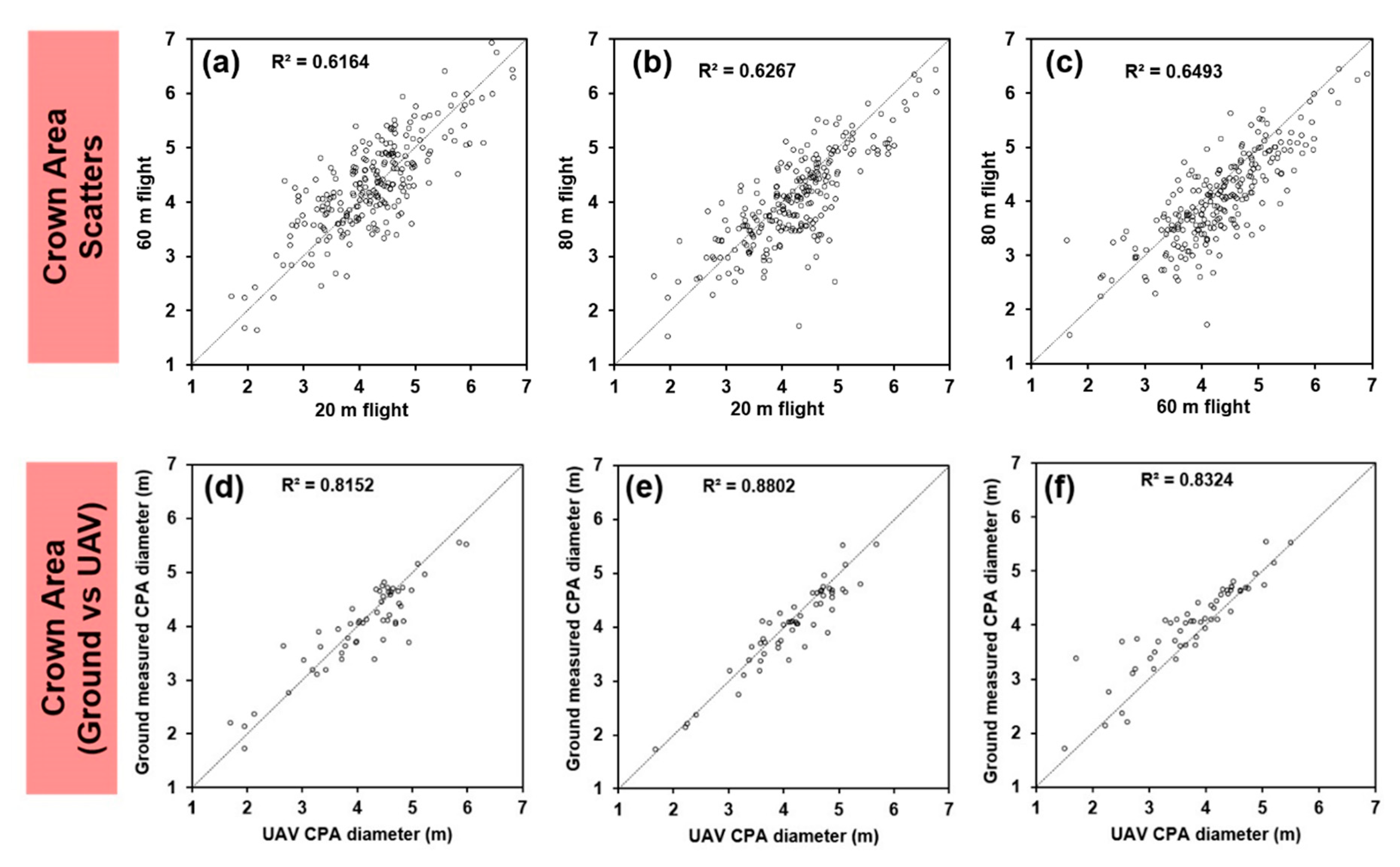
4.1. Crown Projection Area (CPA) Diameter
Validation of CPA Diameter
4.2. Tree Height Model
Validation of Tree Height Model
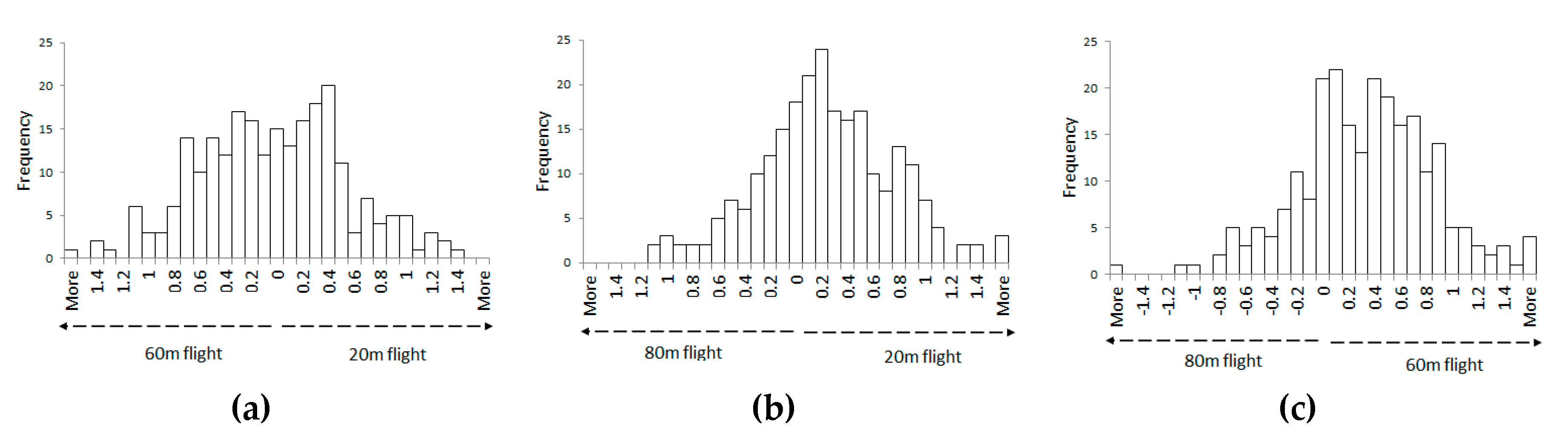
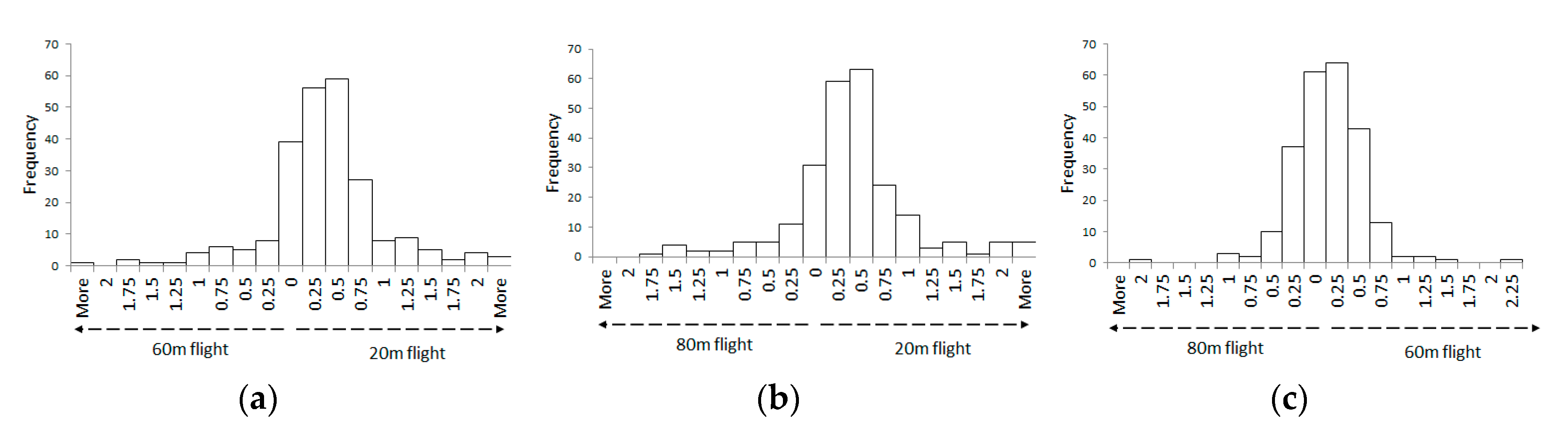
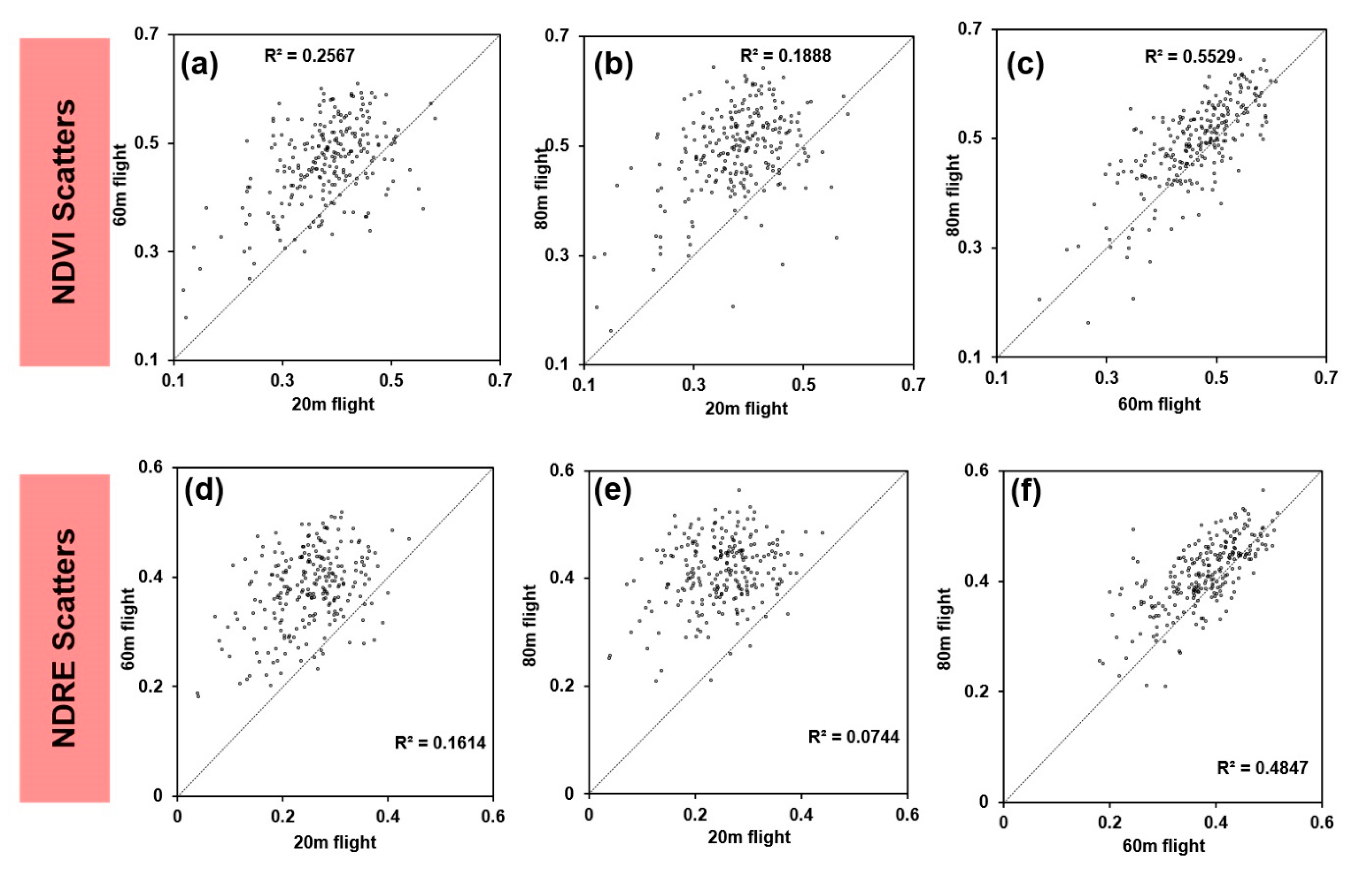
4.3. Vegetation Indices (NDVI and NDRE) Comparison
4.4. Evaluation of Flight Altitude
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A




References
- See, B.D.; Hashim, S.J.; Shafri, H.Z.M.; Azrad, S.; Hassan, M.R. A new rapid, low-cost and GPS-centric unmanned aerial vehicle incorporating in-situ multispectral oil palm trees health detection. J. Agric. Sci. Bot. 2018, 2, 12–16. [Google Scholar]
- The Oil Palm. Economic Contribution. Available online: https://theoilpalm.org/economic-contribution/ (accessed on 10 January 2019).
- Department of Statistics, Malaysia. Available online: https://bit.ly/3hubR5h (accessed on 30 May 2019).
- Woittiez, L.S.; van Wijk, M.T.; Slingerland, M.; van Noordwijk, M.; Giller, K.E. Yield gaps in oil palm: A quantitative review of contributing factors. Eur. J. Agron. 2017, 83, 57–77. [Google Scholar] [CrossRef]
- Malaysia Palm Oil Council (MPOC). The Oil Palm Tree. Available online: http://mpoc.org.my/the-oil-palm-tree/ (accessed on 21 November 2019).
- Toh, C.M.; Ewe, H.T.; Tey, S.H.; Tay, Y.H. A study on the influence of oil palm biophysical parameters on backscattering returns with ALOS-PALSAR2 image. In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 8236–8239. [Google Scholar]
- Rival, A. Breeding the oil palm (Elaeis guineensis Jacq.) for climate change. OCL 2017, 24, 1–7. [Google Scholar] [CrossRef]
- Robert, P.C. Precision agriculture: A challenge for crop nutrition management. Plant Soil 2002, 247, 143–149. [Google Scholar] [CrossRef]
- Friedl, M.A. Remote Sensing of Croplands; Elsevier: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Priwiratama, H.; Susanto, A. Utilization of Fungi for the Biological Control of Insect Pests and Ganoderma Disease in the Indonesian Oil Palm Industry. J. Agric. Sci. Technol. 2014, 4, 103–111. [Google Scholar]
- Avtar, R.; Yunus, A.P.; Saito, O.; Kharrazi, A.; Kumar, P.; Takeuchi, K. Multi-temporal remote sensing data to monitor terrestrial ecosystem responses to climate variations in Ghana. Geocarto Int. 2020, 0, 1–17. [Google Scholar] [CrossRef]
- Avtar, R.; Ishii, R.; Kobayashi, H.; Fadaei, H.; Suzuki, R.; Herath, S. Efficiency of multi-frequency, multi-polarized SAR data to monitor growth stages of oilpalm plants in Sarawak, Malaysia. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 2137–2140. [Google Scholar]
- Meng, L.; Peng, Z.; Zhou, J.; Zhang, J.; Lu, Z.; Baumann, A.; Du, Y. Real-time detection of ground objects based on unmanned aerial vehicle remote sensing with deep learning: Application in excavator detection for pipeline safety. Remote Sens. 2020, 12, 182. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Bansod, B.; Singh, R.; Thakur, R.; Singhal, G. A comparision between satellite based and drone based remote sensing technology to achieve sustainable development: A review. J. Agric. Environ. Int. Dev. 2017, 111, 383–407. [Google Scholar]
- Suab, S.A.; Avtar, R. Unmanned Aerial Vehicle System (UAVS) Applications in Forestry and Plantation Operations: Experiences in Sabah and Sarawak, Malaysian Borneo; Springer: Cham, Germany, 2020. [Google Scholar]
- Dong, X.; Zhang, Z.; Yu, R.; Tian, Q.; Zhu, X. Extraction of Information about Individual Trees from High-Spatial-Resolution UAV-Acquired Images of an Orchard. Remote Sens. 2020, 12, 133. [Google Scholar] [CrossRef]
- Hunt, E.R.; Daughtry, C.S.T. What good are unmanned aircraft systems for agricultural remote sensing and precision agriculture? Int. J. Remote Sens. 2018, 39, 5345–5376. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; de la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-resolution airborne UAV imagery to assess olive tree crown parameters using 3D photo reconstruction: Application in breeding trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Khokthong, W.; Zemp, D.C.; Irawan, B.; Sundawati, L.; Kreft, H.; Hölscher, D. Drone-Based Assessment of Canopy Cover for Analyzing Tree Mortality in an Oil Palm Agroforest. Front. For. Glob. Chang. 2019, 2, 1–10. [Google Scholar] [CrossRef]
- Seifert, E.; Seifert, S.; Vogt, H.; Drew, D.; van Aardt, J.; Kunneke, A.; Seifert, T. Influence of drone altitude, image overlap, and optical sensor resolution on multi-view reconstruction of forest images. Remote Sens. 2019, 11, 1252. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Mesas-Carrascosa, F.J.; Torres-Sánchez, J.; Clavero-Rumbao, I.; García-Ferrer, A.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. Assessing optimal flight parameters for generating accurate multispectral orthomosaicks by uav to support site-specific crop management. Remote Sens. 2015, 7, 12793–12814. [Google Scholar] [CrossRef]
- Fawcett, D.; Azlan, B.; Hill, T.C.; Kho, L.K.; Bennie, J.; Anderson, K. Unmanned aerial vehicle (UAV) derived structure-from-motion photogrammetry point clouds for oil palm (Elaeis guineensis) canopy segmentation and height estimation. Int. J. Remote Sens. 2019, 40, 7538–7560. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D Mapping Applications: A Review. Appl. Geomatics 2013, 6, 1–15. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Borra-Serrano, I.; Peña, J.M. Assessing UAV-collected image overlap influence on computation time and digital surface model accuracy in olive orchards. Precis. Agric. 2018, 19, 115–133. [Google Scholar] [CrossRef]
- Climate data org. Lahad Datu Climate. Available online: https://bit.ly/32ozhoi (accessed on 31 May 2019).
- Wawan, W.; Dini, I.R.; Hapsoh, H. The effect of legume cover crop Mucuna bracteata on soil physical properties, runoff and erosion in three slopes of immature oil palm plantation. IOP Conf. Ser. Earth Environ. Sci. 2019, 250. [Google Scholar] [CrossRef]
- MicaSense. What Is the Accuracy of the Included GPS for RedEdge? Available online: https://support.micasense.com/hc/en-us/articles/115005911207-What-is-the-accuracy-of-the-included-GPS-for-RedEdge (accessed on 30 June 2020).
- Tucker, J.C. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Avtar, R.; Suab, S.A.; Yunus, A.P.; Kumar, P. Applications of UAVs in Plantation Health and Area Management in Malaysia Chapter 7 Applications of UAVs in Plantation Health and Area Management in Malaysia; Springer: Cham, Germany, 2020. [Google Scholar]
- Segarra, J.; Buchaillot, M.L.; Araus, J.L.; Kefauver, S.C. Remote sensing for precision agriculture: Sentinel-2 improved features and applications. Agronomy 2020, 10, 641. [Google Scholar] [CrossRef]
- Stroppiana, D.; Pepe, M.; Boschetti, M.; Crema, A.; Candiani, G.; Giordan, D.; Baldo, M.; Allasia, P.; Monopoli, L. Estimating Crop Density From Multi-spectral UAV Imagery in Maize Crop. In Proceedings of the ISPRS Geospatial Week 2019, Enschede, The Netherlands, 10–14 June 2019; pp. 619–624. [Google Scholar]
- Wijitdechakul, J.; Sasaki, S.; Kiyoki, Y.; Koopipat, C. UAV-based multispectral image analysis system with semantic computing for agricultural health conditions monitoring and real-time management. In Proceedings of the 2016 International Electronics Symposium (IES), Denpasar, Indonesia, 29–30 September 2016; pp. 459–464. [Google Scholar]
- Barnes, E.M.; Clarke, T.R.; Richards, S.E.; Colaizzi, P.D.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident Detection of Crop Water Stress, Nitrogen Status and Canopy Density Using Ground Based Multispectral Data. In Proceedings of the Fifth International Conference on Precision Agriculture, Madison, WI, USA, 16–19 July 2000. [Google Scholar]
- Eitel, J.U.H.; Vierling, L.A.; Litvak, M.E.; Long, D.S.; Schulthess, U.; Ager, A.A.; Krofcheck, D.J.; Stoscheck, L. Broadband, red-edge information from satellites improves early stress detection in a New Mexico conifer woodland. Remote Sens. Environ. 2011, 115, 3640–3646. [Google Scholar] [CrossRef]
- Wicaksono, P.; Danoedoro, P.; Hartono, H.; Nehren, U.; Ribbe, L. Preliminary work of mangrove ecosystem carbon stock mapping in small island using remote sensing: Above and below ground carbon stock mapping on medium resolution satellite image. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology XIII, Prague, Czech Republic, 7 October 2011. [Google Scholar]
- Umarhadi, D.A.; Danoedoro, P. The effect of topographic correction on canopy density mapping using satellite imagery in mountainous area. Int. J. Adv. Sci. Eng. Inf. Technol. 2020, 10, 1317–1325. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, T.; Zhou, P.; Shao, Y.; Gao, S. Validation analysis of SMAP and AMSR2 soil moisture products over the United States using ground-based measurements. Remote Sens. 2017, 9, 104. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision uav estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef]
- Suab, S.A.; Syukur, M.S.; Avtar, R.; Korom, A. Unmanned Aerial Vehicle (UAV) Derived Normalised Difference Vegetation Index (NDVI) and Crown Projection Area (CPA) to Detect Health Conditions of Young Oil Palm Trees for Precision Agriculture. In Proceedings of the 2019 6th International Conference on Geomatics and Geospatial Technology, Kuala Lumpur, Malaysia, 1–3 October 2019; pp. 611–614. [Google Scholar]
- Tan, K.P.; Kanniah, K.D.; Cracknell, A.P. Use of UK-DMC 2 and ALOS PALSAR for studying the age of oil palm trees in southern peninsular Malaysia. Int. J. Remote Sens. 2013, 34, 7424–7446. [Google Scholar] [CrossRef]
- Chemura, A.; van Duren, I.; van Leeuwen, L.M. Determination of the age of oil palm from crown projection area detected from WorldView-2 multispectral remote sensing data: The case of Ejisu-Juaben district, Ghana. ISPRS 2015, 100, 118–127. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Specification |
|---|---|
| Spectral bands | Blue, green, red, red edge, near-infrared |
| Ground sample distance | 8.2 cm/Pixel (per band) at 120 m above ground level |
| Capture speed | Programmable by seconds interval for all bands |
| Format | RAW 12–bit camera |
| Foal length / field of view (FOV) | 5.5 cm/47.2 degrees (FOV) |
| Image resolution | 1280 × 960 pixels |
| Band | Center Wavelength (nm) | Bandwidth (nm) |
|---|---|---|
| Blue (B) | 475 | 32 |
| Green (G) | 560 | 27 |
| Red (R) | 668 | 16 |
| Red edge (R–Edge) | 717 | 12 |
| Near-infrared (NIR) | 842 | 57 |
| Flight Altitude | Area Covered (Acres) | Number of Flights | Planned GSD | Processed GSD | Number of Images | Total Processing Time | Processing Time per Acres |
|---|---|---|---|---|---|---|---|
| 20 m | 5.7 | 4 | 1.39 cm | 1.37 cm | 8800 | 4h and 22 m | 46 m |
| 60 m | 12.2 | 1 | 4.17 cm | 5.16 cm | 2350 | 56 m | 5 m |
| 80 m | 22.0 | 1 | 5.56 cm | 5.68 cm | 2195 | 1h and 6 m | 3 m |
| Flight Altitude | Correlation Coefficient (r) | Accuracy (%) |
|---|---|---|
| 20 m | 0.903 | 90.35 |
| 60 m | 0.938 | 92.47 |
| 80 m | 0.912 | 89.69 |
| Flight Altitude | Correlation Coefficient (r) | Accuracy (%) |
|---|---|---|
| 20 m | 0.765 | 78.10 |
| 60 m | 0.875 | 86.52 |
| 80 m | 0.883 | 85.70 |
| Variables of Comparison | Flight Altitude | Correlation Coefficient (r) | |
|---|---|---|---|
| CPA Diameter | Height | 20 m | 0.277 |
| 60 m | 0.568 | ||
| 80 m | 0.583 | ||
| NDVI | NDRE | 20 m | 0.863 |
| 60 m | 0.910 | ||
| 80 m | 0.924 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Avtar, R.; Suab, S.A.; Syukur, M.S.; Korom, A.; Umarhadi, D.A.; Yunus, A.P. Assessing the Influence of UAV Altitude on Extracted Biophysical Parameters of Young Oil Palm. Remote Sens. 2020, 12, 3030. https://doi.org/10.3390/rs12183030
Avtar R, Suab SA, Syukur MS, Korom A, Umarhadi DA, Yunus AP. Assessing the Influence of UAV Altitude on Extracted Biophysical Parameters of Young Oil Palm. Remote Sensing. 2020; 12(18):3030. https://doi.org/10.3390/rs12183030
Chicago/Turabian StyleAvtar, Ram, Stanley Anak Suab, Mohd Shahrizan Syukur, Alexius Korom, Deha Agus Umarhadi, and Ali P. Yunus. 2020. "Assessing the Influence of UAV Altitude on Extracted Biophysical Parameters of Young Oil Palm" Remote Sensing 12, no. 18: 3030. https://doi.org/10.3390/rs12183030
APA StyleAvtar, R., Suab, S. A., Syukur, M. S., Korom, A., Umarhadi, D. A., & Yunus, A. P. (2020). Assessing the Influence of UAV Altitude on Extracted Biophysical Parameters of Young Oil Palm. Remote Sensing, 12(18), 3030. https://doi.org/10.3390/rs12183030