A Refined Tomographic Window for GNSS-Derived Water Vapor Tomography


Abstract
1. Introduction
2. Methodology
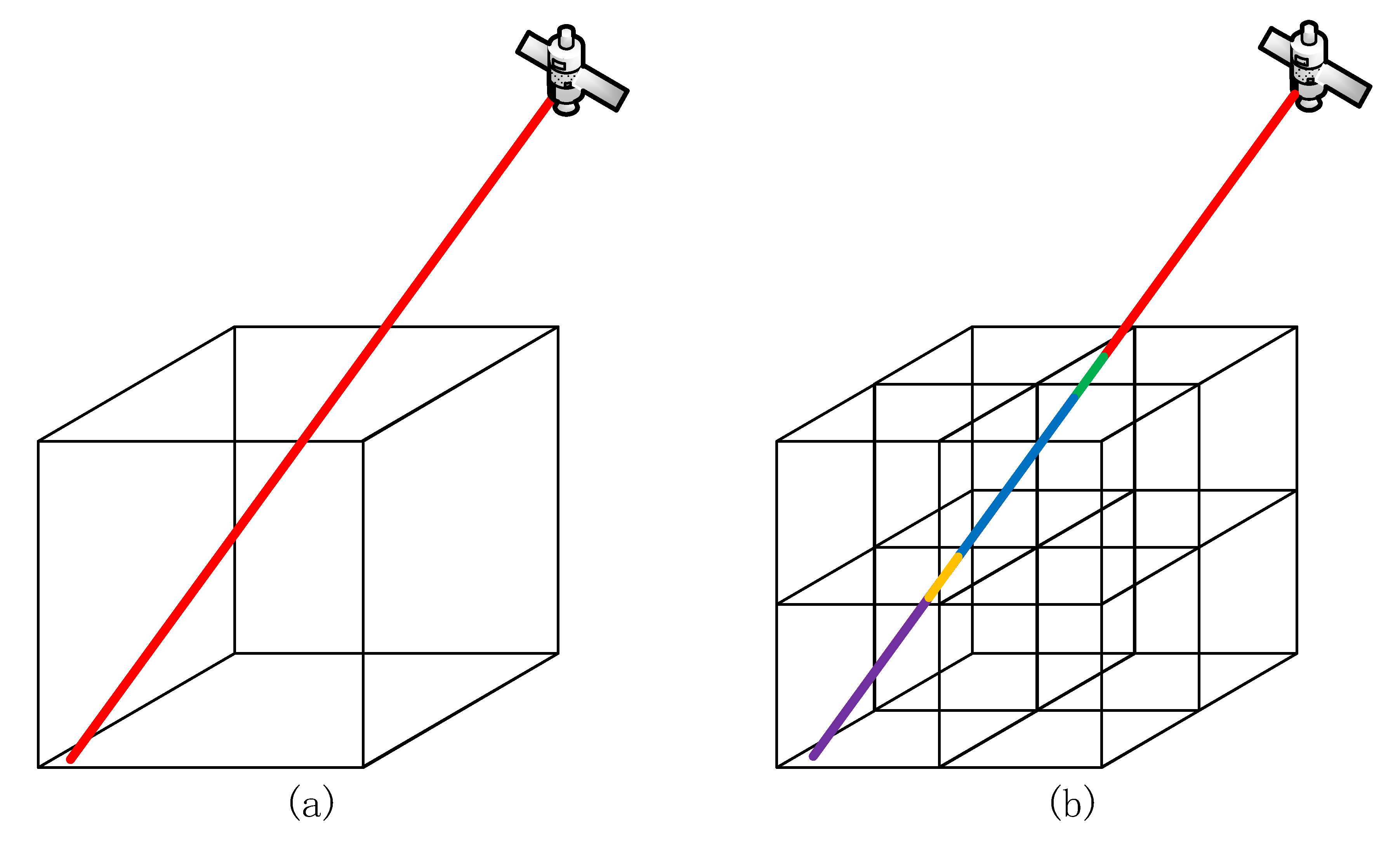
2.1. Reconstruct WV Field by Tropospheric Tomography
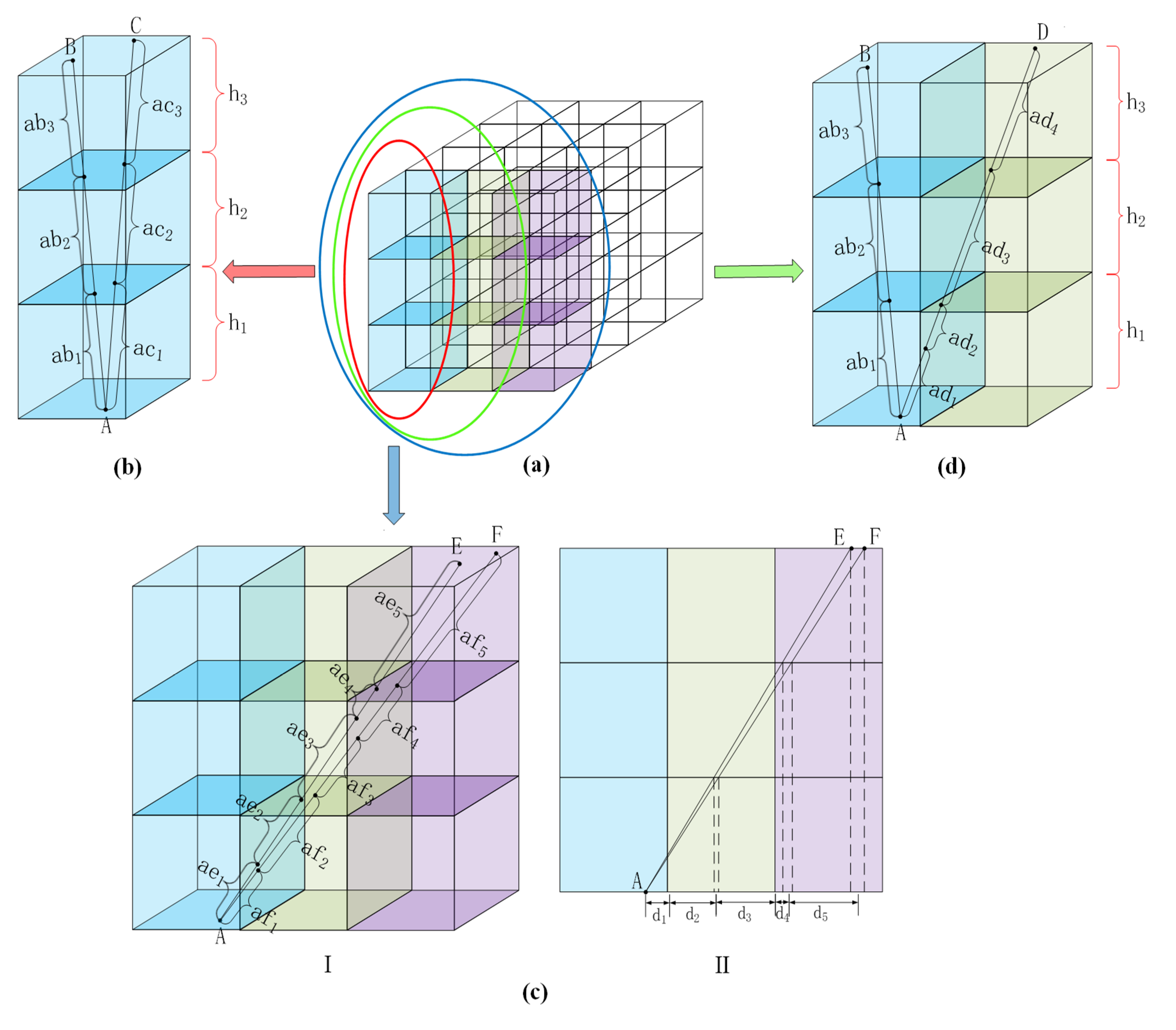
2.2. General Tomographic Window and Existing Problems
2.3. Refined Tomographic Window
3. GNSS Network and Data Preprocessing
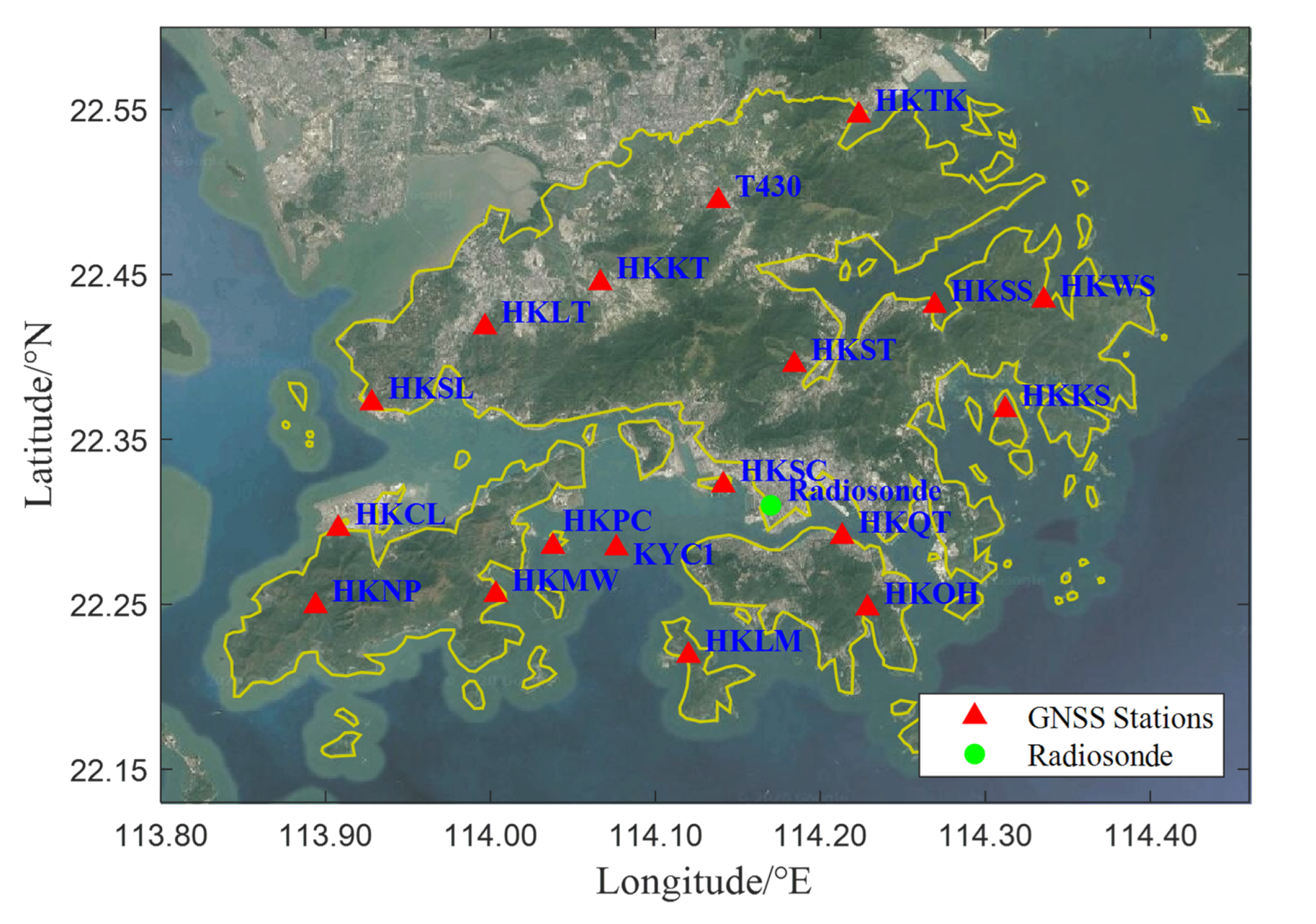
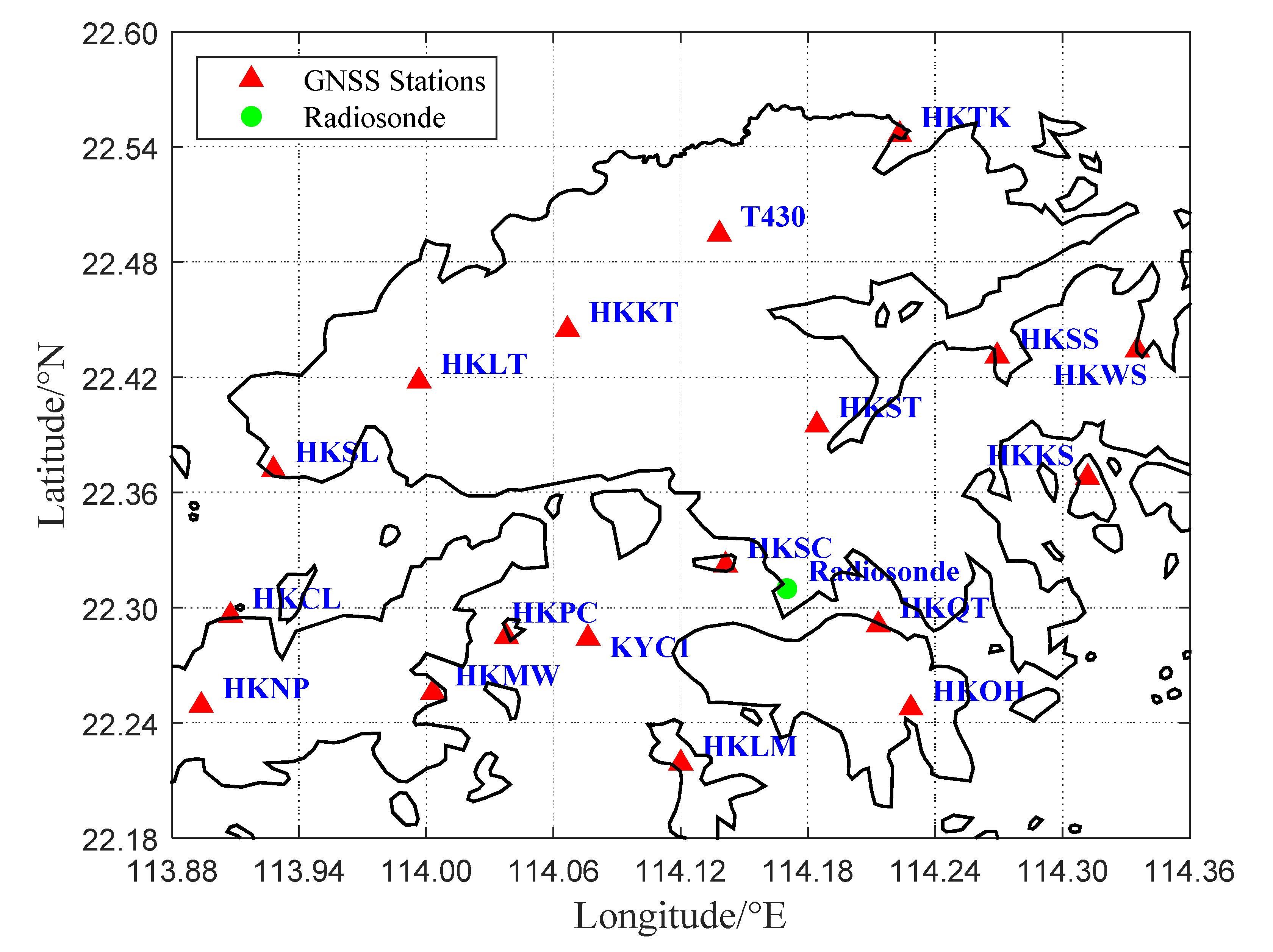
3.1. Hong Kong CORS
3.2. Grid Scheme
3.3. Data Preprocessing
4. Experiment and Results
4.1. Experiment Description
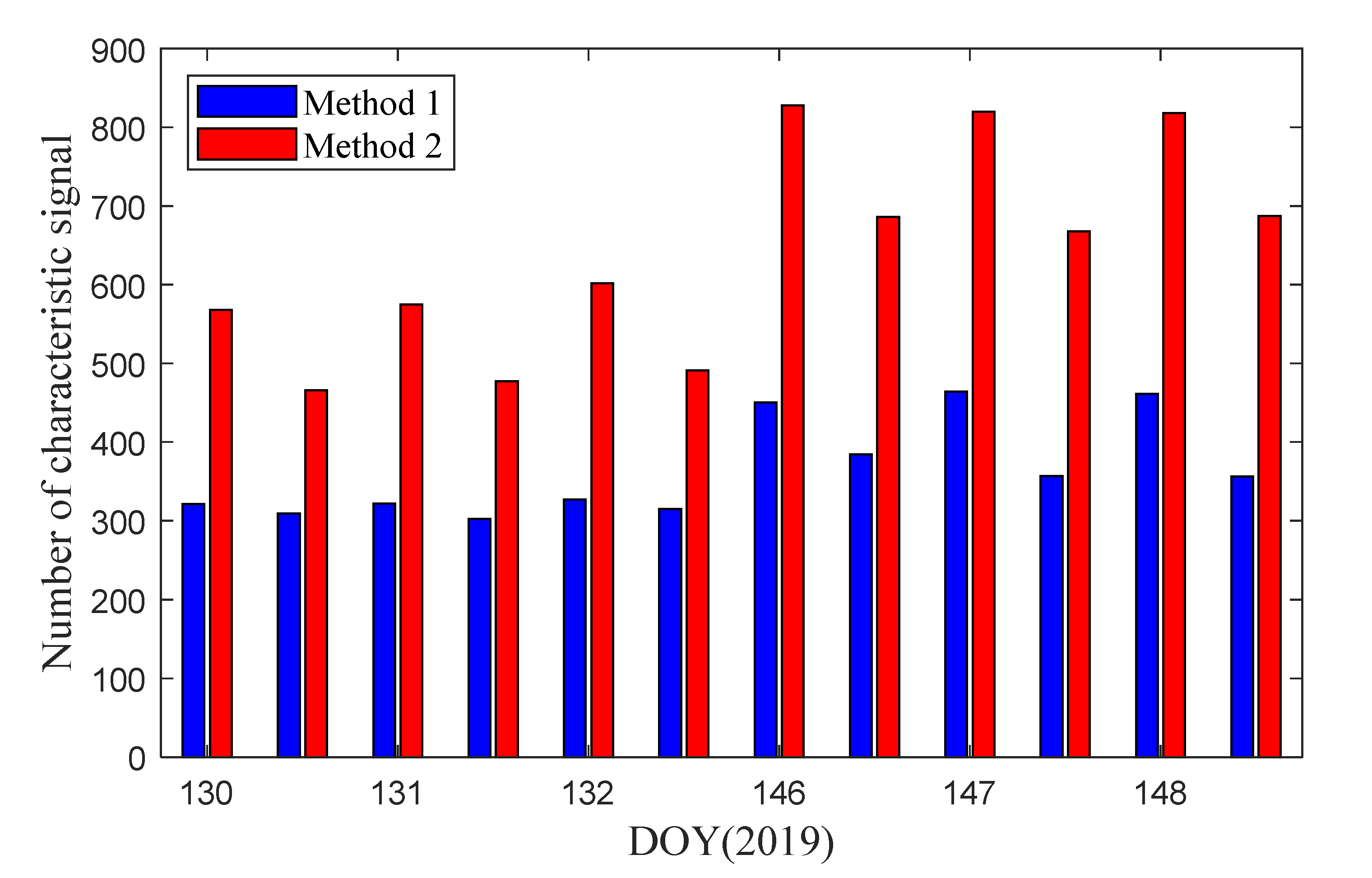
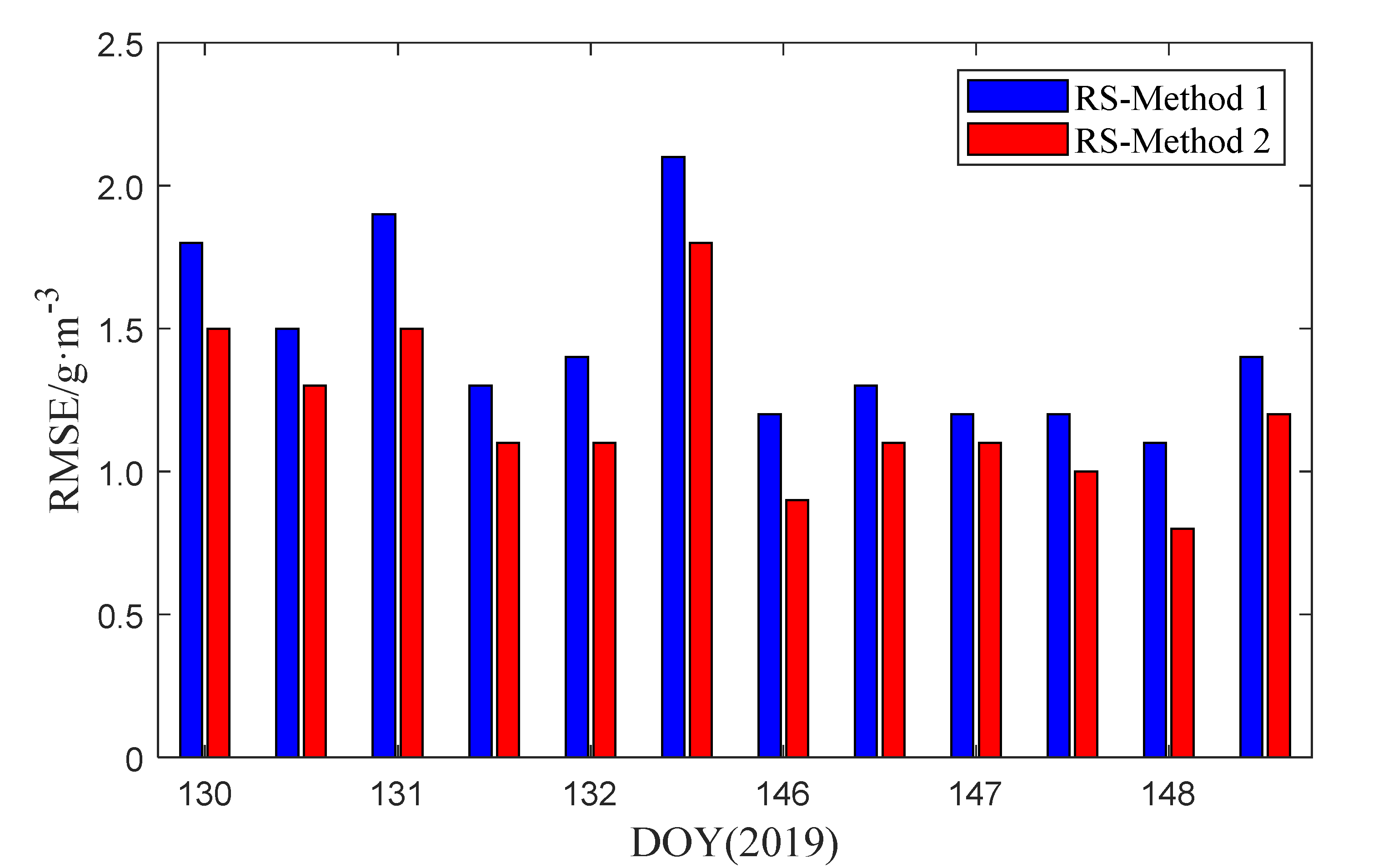
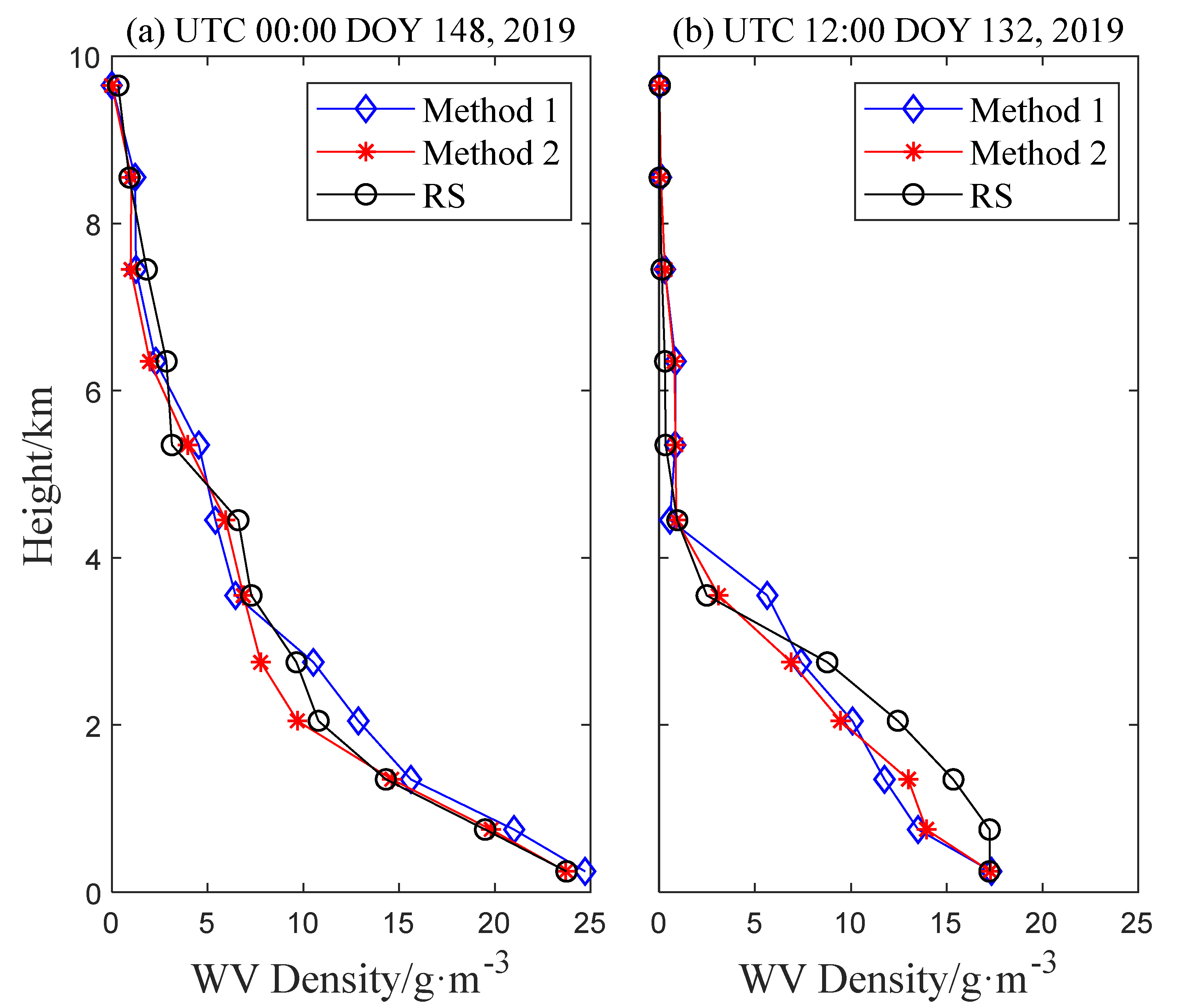
4.2. Tomography Results for The Comparison Between Methods 1 and 2
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bevis, M.; Businger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS meteorology: Remote sensing of atmospheric water vapor using the Global Positioning System. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Rocken, C.; Ware, R.; van Hove, T.; Solheim, F.; Alber, C.; Johnson, J.; Bevis, M.; Businger, S. Sensing atmospheric water vapor with the Global Positioning System. Geophys. Res. Lett. 1993, 20, 2631–2634. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Ma, X.; Yao, W.; Yao, Y.; Li, X. An improved rainfall forecasting model based on GNSS observations. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4891–4900. [Google Scholar] [CrossRef]
- Zhao, Q.; Ma, X.; Yao, Y. Preliminary result of capturing the signature of heavy rainfall events using the 2-d-/4-d water vapour information derived from GNSS measurement in Hong Kong. Adv. Space Res. 2020, 66, 1537–1550. [Google Scholar] [CrossRef]
- Zhao, Q.; Liu, Y.; Yao, W.; Ma, X.; Yao, Y. A novel ENSO monitoring method using precipitable water vapor and temperature in southeast China. Remote Sens. 2020, 12, 649. [Google Scholar] [CrossRef]
- Zhao, Q.; Ma, X.; Yao, W.; Yao, Y. A new typhoon-monitoring method using precipitation water vapor. Remote Sens. 2019, 11, 2845. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. Voxel-optimized regional water vapor tomography and comparison with radiosonde and numerical weather model. J. Geodesy. 2014, 88, 691–703. [Google Scholar] [CrossRef]
- Li, X.; Zus, F.; Lu, C.; Ning, T.; Dick, G.; Ge, M.; Wickert, J.; Schuh, H. Retrieving high-resolution tropospheric gradients from multiconstellation GNSS observations. Geophys. Res. Lett. 2015, 42, 4173–4181. [Google Scholar] [CrossRef]
- Alshawaf, F.; Fuhrmann, T.; Knöpfler, A.; Luo, X.; Mayer, M.; Hinz, S.; Heck, B. Accurate estimation of atmospheric water vapor using GNSS observations and surface meteorological data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3764–3771. [Google Scholar] [CrossRef]
- Yao, Y.; Shan, L.; Zhao, Q. Establishing a method of short-term rainfall forecasting based on GNSS-derived PWV and its application. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef]
- Liu, C.; Zheng, N.; Zhang, K.; Liu, J. A new method for refining the GNSS-derived precipitable water vapor map. Sensors 2019, 19, 698. [Google Scholar] [CrossRef]
- Zhang, B.; Fan, Q.; Yao, Y.; Xu, C.; Li, X. An improved tomography approach based on adaptive smoothing and ground meteorological observations. Remote Sens. 2017, 9, 886. [Google Scholar] [CrossRef]
- Flores, A.; Ruffini, G.; Rius, A. 4D tropospheric tomography using GPS slant wet delays. Ann. Geophys. 2000, 18, 223–234. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, K.; Yao, Y.; Li, X. A new troposphere tomography algorithm with a truncation factor model (TFM) for GNSS networks. GPS Solut. 2019, 23, 64. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, W.; Yao, Y.; Li, X. An improved GNSS tropospheric tomography method with the GPT2w model. GPS Solut. 2020, 24, 1–13. [Google Scholar] [CrossRef]
- Rohm, W.; Bosy, J. The verification of GNSS tropospheric tomography model in a mountainous area. Adv. Space Res. 2011, 47, 1721–1730. [Google Scholar] [CrossRef]
- Alshawaf, F. Constructing Water Vapor Maps by Fusing InSAR, GNSS, and WRF Data. Ph.D. Thesis, Karlsruhe Institute of Technology, Karlsruhe, Germany, 2013. [Google Scholar]
- Benevides, P.; Catalao, J.; Nico, G.; Miranda, P.M. Inclusion of high resolution MODIS maps on a 3D tropospheric water vapor GPS tomography model. In Proceedings of the Remote Sensing of Clouds and the Atmosphere XX, Toulouse, France, 16 October 2015; p. 96400R. [Google Scholar]
- Ye, S.; Xia, P.; Cai, C. Optimization of GPS water vapor tomography technique with radiosonde and COSMIC historical data. Ann. Geophys. 2016, 34, 789–799. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Z. Assessing the performance of troposphere tomographic modeling using multi-source water vapor data during Hong Kong’s rainy season from May to October 2013. Atmos. Meas. Tech. 2016, 9, 5249–5263. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. Bull. Géodésique 1972, 15, 247–251. [Google Scholar]
- Nilsson, T.; Gradinarsky, L. Water vapor tomography using GPS phase observations: Simulation results. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2927–2941. [Google Scholar] [CrossRef]
- Ding, W.; Wang, J.; Rizos, C.; Kinlyside, D. Improving adaptive Kalman estimation in GPS/INS integration. J. Navig. 2007, 60, 517–529. [Google Scholar] [CrossRef]
- Zhao, Q.; Yao, Y.; Cao, X.; Zhou, F.; Xia, P. An optimal tropospheric tomography method based on the multi-GNSS observations. Remote Sens. 2018, 10, 234. [Google Scholar] [CrossRef]
- Dong, Z.; Jin, S. 3-D water vapor tomography in Wuhan from GPS, BDS and GLONASS observations. Remote Sens. 2018, 10, 62. [Google Scholar] [CrossRef]
- Troller, M.R. GPS Based Determination of the Integrated and Spatially Distributed Water Vapor in the Troposphere. Ph.D. Thesis, ETH Zurich, Zürich, Switzerland, 2004. [Google Scholar]
- Yao, Y.; Liu, C.; Xu, C. A new GNSS-Derived water vapor tomography method based on optimized voxel for large GNSS network. Remote Sens. 2020, 12, 2306. [Google Scholar] [CrossRef]
- Herring, T.; King, R.; Floyd, M.; McClusky, S. GAMIT Reference Manual, GPS Analysis at MIT; Department of Earth, Atmospheric, and Planetary Sciences, Massachussets Institute of Technology: Cambridge, MA, USA, 2018. [Google Scholar]
- Zhang, W.; Zhang, S.; Nan, D.; Pengxu, M. An improved tropospheric tomography method based on the dynamic node parametrized algorithm. Acta Geodyn. Geomater. 2020, 17, 191–206. [Google Scholar] [CrossRef]
- Friedman, M. The use of ranks to avoid the assumption of normality implicit in the analysis of variance. J. Am. Stat. Assoc. 1937, 32, 675–701. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Day-of-Year (DOY) | Weather Conditions |
|---|---|---|
| 1 | 130–132 | rainless |
| 2 | 146–148 | rainy |
| Root Mean Square Error (RMSE) (Rainless) | RMSE (Rainy) | |
|---|---|---|
| RS-Method 1 | 1.7 | 1.2 |
| RS-Method 2 | 1.4 | 1.0 |
| Bias | Mean Absolute Error (MAE) | RMSE | |
|---|---|---|---|
| RS-Method 1 | −0.2 | 1.1 | 1.5 |
| RS-Method 2 | −0.1 | 0.9 | 1.2 |
| Source | Sum of Squares (SS) | Degrees of Freedom (df) | Mean Squares (MS) | F | P |
|---|---|---|---|---|---|
| Columns | 1.806 | 1 | 1.806 | 4.123 | 0.045 |
| Error | 58.194 | 143 | 0.438 | ||
| Total | 60 | 287 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, Y.; Liu, C.; Xu, C.; Tan, Y.; Fang, M. A Refined Tomographic Window for GNSS-Derived Water Vapor Tomography. Remote Sens. 2020, 12, 2999. https://doi.org/10.3390/rs12182999
Yao Y, Liu C, Xu C, Tan Y, Fang M. A Refined Tomographic Window for GNSS-Derived Water Vapor Tomography. Remote Sensing. 2020; 12(18):2999. https://doi.org/10.3390/rs12182999
Chicago/Turabian StyleYao, Yibin, Chen Liu, Chaoqian Xu, Yu Tan, and Mingshan Fang. 2020. "A Refined Tomographic Window for GNSS-Derived Water Vapor Tomography" Remote Sensing 12, no. 18: 2999. https://doi.org/10.3390/rs12182999
APA StyleYao, Y., Liu, C., Xu, C., Tan, Y., & Fang, M. (2020). A Refined Tomographic Window for GNSS-Derived Water Vapor Tomography. Remote Sensing, 12(18), 2999. https://doi.org/10.3390/rs12182999