Displacements Monitoring over Czechia by IT4S1 System for Automatised Interferometric Measurements Using Sentinel-1 Data

 , ,
, ,
Abstract
1. Introduction
1.1. Goals and Expected Benefits for Society
- -
- Static annual maps of active slope failures (especially creeps or slow landslides). Risk management is often not aware of a landslide threat in inundated areas where floods may activate an existing slope failure. InSAR-based maps of slow active landslides/unstable slopes can give an additional (experimental) information raising the caution of landslide activity in affected areas.
- -
- Static maps of (vertical) displacements of structures, with a millimetric sensitivity—remotely acquired information about current displacements can play an important role in the identification of potential structure issues. InSAR may be used to monitor transportation objects (motor roads, railroads, bridges), dam constructions, inhabited buildings, electricity towers, etc. To achieve the most complete information, data from opposing satellite passes can be combined into an analysis known as a decomposition of line-of-sight (LOS) vectors into horizontal and vertical directions [18].
- -
- Static annual maps of terrain development in urban or nonurban areas, such as the development of, e.g., mine-induced subsidence, terrain deformation related to hydrogeological changes (e.g., droughts) or pressure changes due to underground gas storage fluctuations, etc. Provided information about identified terrain changes or a stabilisation of movements in affected areas can be important information for, e.g., municipal urban planning facilities.
1.2. Computational and Storage Resources
1.3. Data Coverage
2. InSAR Functionality Implemented within IT4S1
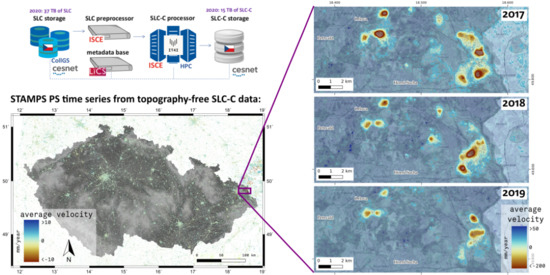
2.1. Generation of SLC-C Data
2.1.1. Establishing Base Dataset
2.1.2. Coregistration Process
2.2. Multitemporal InSAR Processing
2.2.1. Primary Processing by PS InSAR
2.2.2. STAMPS SB and Quasi-SB Processing
2.2.3. LiCSBAS Processing
2.3. Visualization of Results
3. Processing over Czech Bursts
3.1. Nationwide Processing Output of Czechia
- -
- Deformations in the surroundings of an open pit mine near Polish Turów (Figure 7b). Subsidence of a German Zittau and the border area between Czechia and Germany was observed as well;
- -
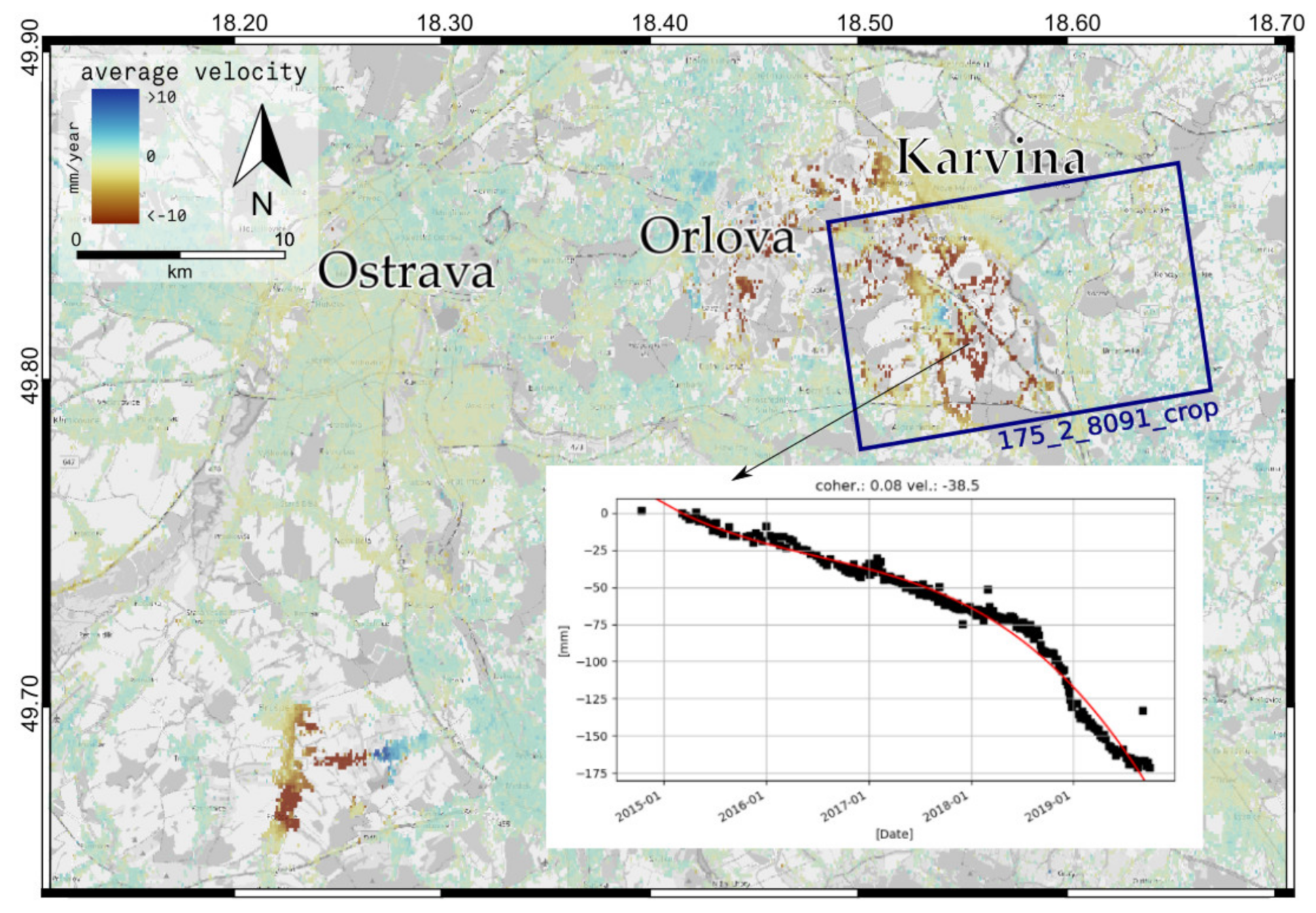
- Subsidence and uplift detected over an active black coal mine in the Brusperk vicinity (Figure 7c);
- -
- Settlement of an industrial area in Prostejov city (Figure 7d);
- -
- Uplift in the surroundings of Kladno city (Figure 7e);
- -
- Local subsidence or a building settlement in the surroundings of Hostivice (Figure 7f).
3.2. Small Area On-Demand Processing—CSM Mine Example
4. Discussion
4.1. Computational Load
- -
- until October 2017: 62,900 burst images; approximately 53,000 core-hours,
- -
- October 2017 to December 2020: approximately 136,000 burst images; approximately 61,000 core-hours.
4.2. Current and Future Storage Needs for Czechia
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using Permanent Scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef]
- Ferretti, A.; Savio, G.; Barzaghi, R.; Borghi, A.; Musazzi, S.; Novali, F.; Prati, C.; Rocca, F. Submillimeter Accuracy of InSAR Time Series: Experimental Validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1142–1153. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Perissin, D.; Wang, T. Repeat-pass SAR Interferometry with Partially Coherent Targets. IEEE Trans. Geosci. Remote Sens. 2012, 50, 271–280. [Google Scholar] [CrossRef]
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Yague-Martinez, N.; Prats-Iraola, P.; Gonzalez, F.; Brcic, R.; Shau, R.; Geudtner, D.; Eineder, M.; Bamler, R. Interferometric Processing of Sentinel-1 TOPS Data. IEEE Trans. Geos. Remote Sens. 2016, 54, 2220–2234. [Google Scholar] [CrossRef]
- Zebker, H.A.; Hensley, S.; Shanker, P.; Wortham, C. Geodetically Accurate InSAR Data Processor. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4309–4321. [Google Scholar] [CrossRef]
- Fattahi, H.; Agram, P.; Simons, M. A network-based enhanced spectral diversity approach for TOPS time-series analysis. IEEE Trans. Geosci. Remote Sens. 2017, 55, 777–786. [Google Scholar] [CrossRef]
- Lazecky, M.; Bakon, M.; Hlavacova, I.; Sousa, J.J.; Real, N.; Perissin, D.; Patricio, G. Bridge Displacements Monitoring using Space-Borne SAR Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Rem. Sens. (J-STARS) 2016, 10, 205–210. [Google Scholar] [CrossRef]
- Lazecky, M.; Bakon, M.; Perissin, D.; Papco, J.; Gamse, S. Analysis of dam displacements by spaceborne SAR interferometry. In Proceedings of the ICOLD 2017, Prague, Czech Republic, 3–7 July 2017. [Google Scholar]
- Comut, F.C.; Ustun, A.; Lazecky, M.; Perissin, D. Capability of detecting rapid subsidence with Cosmo SkyMed and Sentinel-1 dataset over Konya city. In Proceedings of the ESA Living Planet Symposium, ESA SP740, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Jiránková, E.; Lazecký, M. Specifics in the formation of substituence through in the Karvina part of the Ostrava-Karvina coalfield with the use radar interferometry. Acta Geodyn. Geomater. 2016, 13, 263–269. [Google Scholar] [CrossRef]
- Lazecky, M.; Jirankova, E.; Kadlecik, P. Multitemporal monitoring of Karvina subsidence trough using Sentinel-1 and TerraSAR-X interferometry. Acta Geodyn. Geomater. 2017, 14, 53–59. [Google Scholar] [CrossRef]
- Lazecky, M.; Comut, F.C.; Nikolaeva, E.; Bakon, M.; Papco, J.; Ruiz-Armenteros, A.M.; Qin, Y.; Sousa, J.J.; Ondrejka, P. Potential of Sentinel-1A for nation-wide routine updates of active landslide maps. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, XLI, 775–781. [Google Scholar] [CrossRef]
- Lazecky, M.; Hlavacova, I.; Kocich, D. Czech System for exploitation of land dynamics using Copernicus Sentinel-1 data. In Proceedings of the GIS Ostrava 2017, Ostrava, Czech Republic, 22–24 March 2017. [Google Scholar] [CrossRef]
- Lazecky, M. System for Automatized Sentinel–1 Interferometric Monitoring. In Proceedings of the 2017 conference on Big Data from Space, Toulouse, France, 28–30 November 2017; pp. 161–165. [Google Scholar]
- Lazecký, M.; Spaans, K.; González, P.J.; Maghsoudi, Y.; Morishita, Y.; Albino, F.; Elliott, J.; Greenall, N.; Hatton, E.; Hooper, A.; et al. LiCSAR: An Automatic InSAR Tool for Measuring and Monitoring Tectonic and Volcanic Activity. Remote Sens. 2020, 12, 2430. [Google Scholar] [CrossRef]
- Wright, T.J.; Parsons, B.E.; Lu, Z. Toward mapping surface deformation in three dimensions using InSAR. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef]
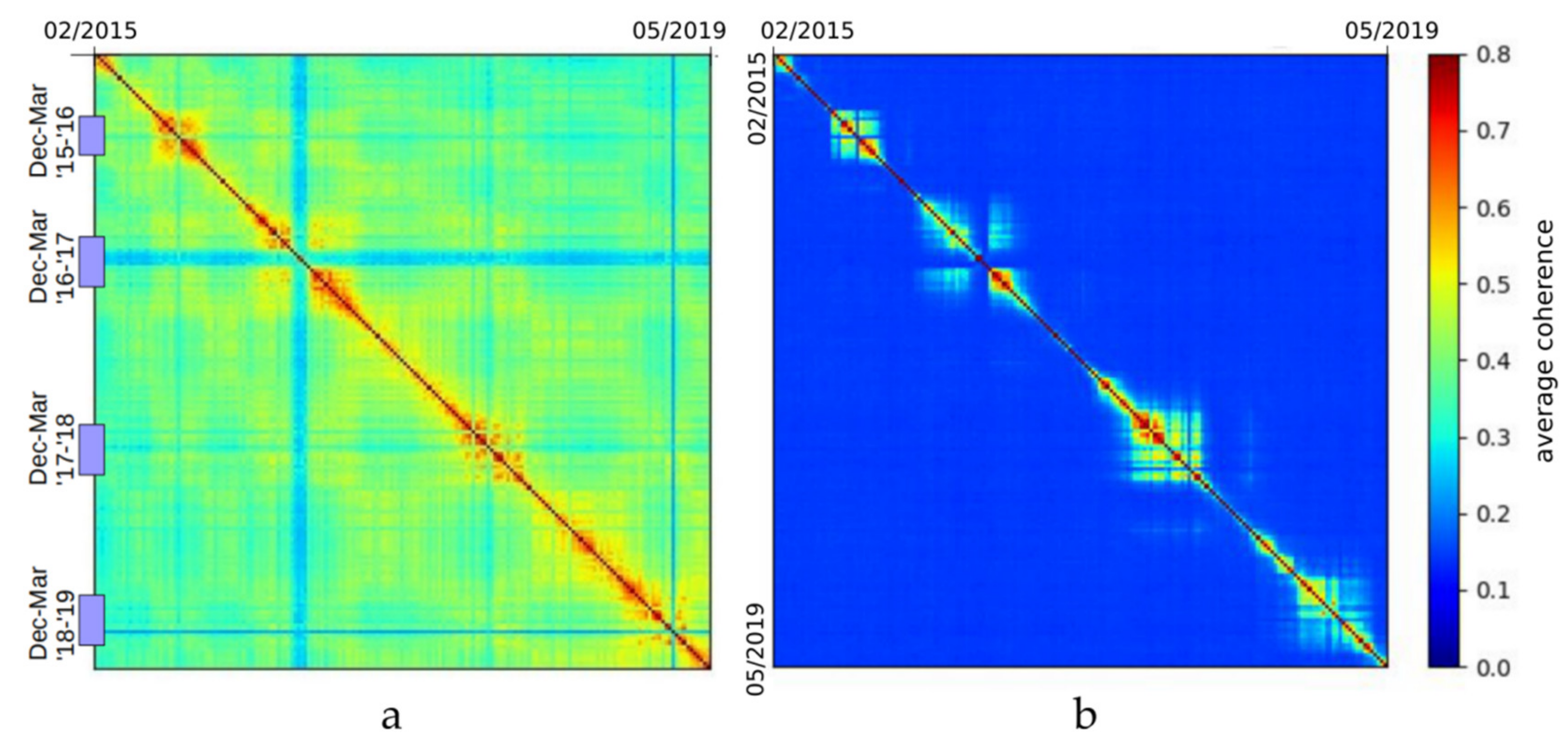
- Lazecky, M.; Hlavacova, I.; Martinovic, J.; Ruiz-Armenteros, A.M. Accuracy of Sentinel-1 interferometry monitoring system based on topography-free phase images. Procedia Comput. Sci. 2018, 138, 310–317. [Google Scholar] [CrossRef]
- ISCE Team, Overview of S1A TOPS Processing with ISCE –topsApp.py. Available online: http://etdedata.gein.noa.gr/ISCE_UNAVCO/topsApp_ISCE_20160418.pdf (accessed on 31 July 2020).
- Qin, Y.; Perissin, D.; Bai, J. Investigations on the coregistration of Sentinel-1 TOPS with the conventional cross-correlation technique. Remote Sens. 2018, 10, 1405. [Google Scholar] [CrossRef]
- Hooper, A. A multi-temporal InSAR method incorporating both persistent scatterer and small baseline approaches. Geophys. Res. Lett. 2008, 35, L16302. [Google Scholar] [CrossRef]
- Hooper, A.; Bekaert, D.; Hussain, E.; Spaans, K.; Arikaan, M. StaMPS/MTI Manual. Available online: https://github.com/dbekaert/StaMPS/blob/master/Manual/StaMPS_Manual.pdf (accessed on 20 February 2020).
- Colesanti, C.; Ferretti, A.; Novali, F.; Prati, C.; Rocca, F. SAR Monitoring of Progressive And Seasonal Ground Deformation Using the Permanent Scatterers Technique. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1685–1701. [Google Scholar] [CrossRef]
- Morishita, Y.; Lazecky, M.; Wright, T.J.; Weiss, J.R.; Elliott, J.R.; Hooper, A. LiCSBAS: An Open-Source InSAR Time Series Analysis Package Integrated with the LiCSAR Automated Sentinel-1 InSAR Processor. Remote Sens. 2020, 12, 424. [Google Scholar] [CrossRef]
- Tange, O. GNU Parallel-The Command-Line Power Tool. USENIX Mag. 2011, 36, 42–47. [Google Scholar]
- Ruiz-Armenteros, A.M.; Lazecky, M.; Hlavacova, I.; Bakon, M.; Delgado, J.M.; Sousa, J.J.; Lamas-Fernández, F.; Marchamalo, M.; Caro-Cuenca, M.; Papco, J.; et al. Deformation monitoring of dam infrastructures via spaceborne MT-InSAR: The case of La Viñuela (Málaga, southern Spain). Procedia Comput. Sci. 2018, 138, 346–353. [Google Scholar] [CrossRef]
- Lazecky, M. Identification of active slope motion in Czech environment using Sentinel-1 interferometry. Springer Lect. Notes Geoinf. Cartogr. 2018, 1, 21–23. [Google Scholar]
- Schmidt, D.A.; Bürgmann, R. Time-dependent land uplift and subsidence in the Santa Clara valley, California, from a large interferometric synthetic aperture radar data set. J. Geophys. Res. Solid Earth 2003, 108, 2267. [Google Scholar] [CrossRef]
- Kampes, B.; Hanssen, R.F.; Perski, Z. Radar Interferometry with Public Domain Tools. In Proceedings of the Fringe 2003, Frascati, Italy, 1–5 December 2003. [Google Scholar]
- Chen, C.W.; Zebker, H.A. Phase unwrapping for large SAR interferograms: Statistical segmentation and generalized network models. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1709–1719. [Google Scholar] [CrossRef]
- Chen, C.W.; Zebker, H.A. Network approaches to two-dimensional phase unwrapping: Intractability and two new algorithms. J. Opt. Soc. Am. 2000, 17, 401–414. [Google Scholar] [CrossRef]
- GDAL/OGR Geospatial Data Abstraction Software Library. Available online: https://gdal.org (accessed on 31 July 2020).
- giSAR (Quantum GIS Toolbox). Available online: https://github.com/espiritocz/giSAR (accessed on 20 February 2020).
- Sucameli, G. PS Time Series Viewer. Available online: https://gitlab.com/faunalia/ps-speed (accessed on 25 August 2020).
- Rapant, P.; Struhar, J.; Lazecky, M. Radar Interferometry as a Comprehensive Tool for Monitoring the Fault Activity in the Vicinity of Underground Gas Storage Facilities. Remote Sens. 2020, 12, 271. [Google Scholar] [CrossRef]
- Ansari, H.; De Zan, F.; Parizzi, A. Study of Systematic Bias in Measuring Surface Deformation with SAR Interferometry. IEEE Trans. Geosci. Remote Sens. 2020, 27, 10061. [Google Scholar] [CrossRef]
- Overview of NISAR Mission and Airborne L & S SAR. Available online: https://vedas.sac.gov.in/vedas/downloads/ertd/SAR/L_1.pdf (accessed on 25 May 2020).
- Ruiz-Armenteros, A.M.; Lazecky, M.; Ruiz-Constán, A.; Bakon, M.; Delgado, J.M.; Sousa, J.J.; Galindo-Zaldívar, J.; de Galdeano, C.S.; Caro-Cuenca, M.; Martos-Rosillo, S.; et al. Monitoring continuous subsidence in the Costa del Sol (Málaga province, southern Spanish coast) using ERS-1/2, Envisat, and Sentinel-1A/B SAR interferometry. Procedia Comput. Sci. 2018, 138, 354–361. [Google Scholar] [CrossRef]
- Chavez Hernandez, J.A.; Lazecky, M.; Sebesta, J.; Bakon, M. Relation between surface dynamics and remote sensor InSAR results over the Metropolitan Area of San Salvador. Nat. Hazards 2020, 103, 3661–3682. [Google Scholar] [CrossRef]
- Lazecky, M.; Lhota, S.; Wenglarzyova, P.; Joshi, N. Evaluation of forest loss in Balikpapan Bay in the end of 2015 based on Sentinel-1A polarimetric analysis. In Proceedings of the IGRSM 2018, Kuala Lumpur, Malaysia, 24–25 April 2018. [Google Scholar] [CrossRef]
- Lazecky, M.; Wadhwa, S.; Mlcousek, M. Simple method for identification of forest windthrows from Sentinel-1 SAR data incorporating PCA. In Proceedings of the CENTERIS SARWatch 2020, Vilamoura, Portugal, 21–23 October 2020. accepted for publication. [Google Scholar]
- Nielsen, A.A.; Canty, M.J.; Skriver, H.; Conradsen, K. Change detection in multi-temporal dual polarization Sentinel-1 data. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017. [Google Scholar] [CrossRef]
- Bourbigot, M.; Johnsen, H.; Piantanida, R.; Hajduch, G.; Poullaouec, J. Sentinel-1 Product Definition, Technical Report Ref. S1-RS-MDA-52-7440. Available online: https://sentinel.esa.int/documents/247904/1877131/Sentinel-1-Product-Definition (accessed on 20 February 2020).
- De Luca, C.; Zinno, I.; Manunta, M.; Lanari, R.; Casu, F. Large areas surface deformation analysis through a cloud computing P-SBAS approach for massive processing of DInSAR time series. Remote Sens. Environ. 2017, 202, 3–17. [Google Scholar] [CrossRef]
- Bakon, M.; Czikhardt, R.; Papco, J.; Barlak, J.; Rovnak, M.; Adamisin, P.; Perissin, D. remotIO: A Sentinel-1 Multi-Temporal InSAR Infrastructure Monitoring Service with Automatic Updates and Data Mining Capabilities. Remote Sens. 2020, 12, 1892. [Google Scholar] [CrossRef]
- Ferretti, A.; Fumagalli, A.; Novali, F.; Prati, C.; Rocca, F.; Rucci, A. A New Algorithm for Processing Interferometric Data-Stacks: SqueeSAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3460–3470. [Google Scholar] [CrossRef]
- Samiei-Esfahany, S.; Hanssen, R.F. New algorithm for InSAR stack phase triangulation using integer least squares estimation. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 884–887. [Google Scholar] [CrossRef]
- Sandwell, D.; Mellors, R.; Tong, X.; Xu, X.; Wei, M.; Wessel, P. GMTSAR An InSAR Processing System Based on Generic Mapping Tools. Available online: https://topex.ucsd.edu/gmtsar/tar/GMTSAR_2ND_TEX.pdf (accessed on 31 July 2020).
- Miranda, N. Definition of the TOPS SLC Deramping Function for Products Generated by the S-1 IPF. Tech. Rep. Available online: https://earth.esa.int/documents/247904/1653442/Sentinel-1-TOPS-SLC_Deramping (accessed on 31 July 2020).
- Podhoranyi, M.; Veteska, P.; Szturcova, D.; Vojacek, L.; Portero, A. A web-based modelling and monitoring system based on coupling environmental models and hydrological-related data. J. Commun. 2017, 12, 340–346. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Relative Orbit | Swath | No. of Bursts | Incidence Angle |
|---|---|---|---|
| descending tracks | |||
| 22 * | 1 * | 18 * | 33.5° |
| 22 | 2 | 18 | 39.0° |
| 22 | 3 | 17 | 43.6° |
| 51 | 3 | 17 | 43.7° |
| 95 | 1 | 18 | 33.6° |
| 95 | 2 | 18 | 39.0° |
| 95 | 3 | 18 | 43.7° |
| 124 | 1 | 18 | 33.5° |
| 124 | 2 | 18 | 39.0° |
| 124 | 3 | 17 | 43.7° |
| 168 | 1 | 18 | 33.7° |
| ascending tracks | |||
| 44 | 2 | 15 | 39.2° |
| 44 | 3 | 18 | 43.8° |
| 73 | 1 | 18 | 33.7° |
| 73 | 2 | 18 | 39.1° |
| 73 | 3 | 18 | 43.7° |
| 146 | 1 | 18 | 33.7° |
| 146 | 2 | 18 | 39.0° |
| 146 | 3 | 17 | 43.7° |
| 175 | 1 | 18 | 33.6° |
| 175 | 2 | 17 | 39.1° |
| Parameter | Burst-Wise PS | Small Area PS | Small Area SB |
|---|---|---|---|
| ADI threshold | 0.4 | 0.4 | 0.52 |
| gamma_max_iterations | 3 | 5 | 5 |
| gamma_change_convergence | 0.01 | 0.01 | 0.04 |
| clap_win | 32 | 8–64 (size dependent) | 8–64 (size dependent) |
| clap_low_pass_wavelength | 800 m | 800 m | 600 m |
| max_topo_err | 25 m | 30 m | 15 m |
| weed_standard_dev | 1.4 | 1.5 | 1.0 |
| merge_resample_size | 50 m | - | 50 m |
| unwrap_time_win | 90 days | 30 days | 730 days |
| unwrap_gold_alpha | 0.75 | 0.4 | 0.8 |
| unwrap_gold_n_win | 16 | 8 | 8–32 (size dependent) |
| unwrap_grid_size | 320 | 200 | 200 |
| ifg_std threshold (first iteration) | 55 | 45 | 45 |
| scla_deramp | yes | only areas > 10 km | only areas > 7 km |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazecký, M.; Hatton, E.; González, P.J.; Hlaváčová, I.; Jiránková, E.; Dvořák, F.; Šustr, Z.; Martinovič, J. Displacements Monitoring over Czechia by IT4S1 System for Automatised Interferometric Measurements Using Sentinel-1 Data. Remote Sens. 2020, 12, 2960. https://doi.org/10.3390/rs12182960
Lazecký M, Hatton E, González PJ, Hlaváčová I, Jiránková E, Dvořák F, Šustr Z, Martinovič J. Displacements Monitoring over Czechia by IT4S1 System for Automatised Interferometric Measurements Using Sentinel-1 Data. Remote Sensing. 2020; 12(18):2960. https://doi.org/10.3390/rs12182960
Chicago/Turabian StyleLazecký, Milan, Emma Hatton, Pablo J. González, Ivana Hlaváčová, Eva Jiránková, František Dvořák, Zdeněk Šustr, and Jan Martinovič. 2020. "Displacements Monitoring over Czechia by IT4S1 System for Automatised Interferometric Measurements Using Sentinel-1 Data" Remote Sensing 12, no. 18: 2960. https://doi.org/10.3390/rs12182960
APA StyleLazecký, M., Hatton, E., González, P. J., Hlaváčová, I., Jiránková, E., Dvořák, F., Šustr, Z., & Martinovič, J. (2020). Displacements Monitoring over Czechia by IT4S1 System for Automatised Interferometric Measurements Using Sentinel-1 Data. Remote Sensing, 12(18), 2960. https://doi.org/10.3390/rs12182960