Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images


Abstract
1. Introduction
2. Method Description
2.1. Rationale and Originalities
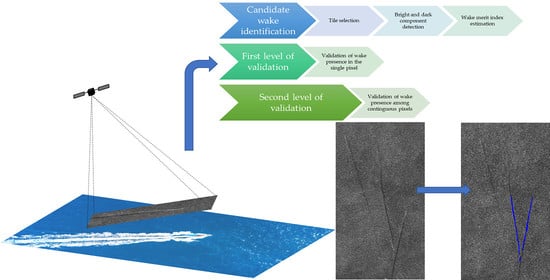
- The proposed approach separates the wake detection process from the ship trace in the radar image. In fact, each pixel of the image is analyzed to identify if there are wakes crossing the pixel.
- Only the turbulent and narrow-V components of the wake is searched as a marker of the ship presence
- After the wake candidate reconstruction, two levels of wake presence validation are proposed (as detailed in Section 2.2), the first one is relative to the wake presence in a single pixel and the second one is relative to the wake presence in neighbor pixels. This strongly increases the level of confidence that the wake is really imaged.
- A new index of merit of the wake presence is introduced and refereed to the whole wake and not to each wake component
2.2. Method Details
3. Results
4. Discussion
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- NATO-MSA. Available online: https://www.coecsw.org/our-work/projects/maritime-situational-awareness/ (accessed on 27 June 2020).
- Call H2020 1. Available online: https://ec.europa.eu/info/funding-tenders/opportunities/portal/screen/opportunities/topic-details/edidp-msc-is-2020 (accessed on 29 June 2020).
- Call H2020 2. Available online: https://ec.europa.eu/info/funding-tenders/opportunities/portal/screen/opportunities/topic-details/su-bes03-2018-2019-2020 (accessed on 29 June 2020).
- Kanjir, U.; Greidanus, H.; Oštir, K. Vessel detection and classification from spaceborne optical images: A literature survey. Remote Sens. Environ. 2018, 207, 1–26. [Google Scholar] [CrossRef] [PubMed]
- Greidanus, H.; Alvarez, M.; Santamaria, C.; Thoorens, F.-X.; Kourti, N.; Argentieri, P. The SUMO Ship Detector Algorithm for Satellite Radar Images. Remote Sens. 2017, 9, 246. [Google Scholar] [CrossRef]
- Greidanus, H. Satellite imaging for maritime surveillance of the European seas. In Remote Sensing of the European Seas; Springer: Dordrecht, The Netherlands, 2008; ISBN 9781402067716. [Google Scholar]
- Vachon, P.W.; Kabatoff, C.; Quinn, R. Operational ship detection in Canada using RADARSAT. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 998–1001. [Google Scholar]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery; DSTO-RR–0272; DSTO Information Sciences Laboratory: Edinburgh, Australia, 2004. [Google Scholar]
- International Maritime Organization AIS Transponders. Available online: http://www.imo.org/es/OurWork/Safety/Navigation/Paginas/AIS.aspx (accessed on 16 December 2019).
- Frontex Technical Support for Testing and Evaluation of a New Copernicus Service. Available online: https://etendering.ted.europa.eu/cft/cft-document.html?locale=it&docId=32385 (accessed on 22 August 2020).
- Tunaley, J.K.E. Wakes from Go-Fast and Small Planing Boats; Ottawa, ON, Canada, 2014. Available online: http://www.london-research-and-development.com/Go-Fast-Wakes.pdf (accessed on 3 August 2020).
- Shahbazian, E.; Rogova, G. Meeting Security Challenges Through Data Analytics and Decision Support; NATO Science for Peace and Security Series—D: Information and Communication Security; IOS Press: Amsterdam, The Netherlands, 2016; Volume 47, ISBN 978-1-61499-715-3. [Google Scholar]
- Graziano, D.M.; Renga, A.; Moccia, A. Integration of Automatic Identification System (AIS) Data and Single-Channel Synthetic Aperture Radar (SAR) Images by SAR-Based Ship Velocity Estimation for Maritime Situational Awareness. Remote Sens. 2019, 11, 2196. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Razzano, E. Maritime surveillance by integrating remote sensing and AIS: A preliminary analysis. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Tunaley, J.K.E. Ship Wakes. Available online: http://www.london-research-and-development.com/Ship-Wake.html (accessed on 27 June 2020).
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2335–2343. [Google Scholar] [CrossRef]
- Pichel, W.G.; Clemente-colón, P.; Wackerman, C.C.; Friedman, K.S. Ship and Wake Detection. In SAR Marine Users Manual; National Oceanic and Atmospheric Administration (NOAA), US Department of Commerce: Washington, DC, USA, 2004. Available online: https://www.sarusersmanual.com/ (accessed on 27 July 2020).
- Ermakov, S.; Kapustin, I.; Lazareva, T. Ship Wake Signatures in Radar/Optical Images of the Sea Surface: Observations and Physical Mechanisms. In Proceedings of the SPIE—The International Society for Optical Engineering, Amsterdam, The Netherlands, 14 October 2014; Volume 9240. [Google Scholar]
- Hennings, I.; Romeiser, R.; Alpers, W.; Viola, A. Radar imaging of Kelvin arms of ship wakes. Int. J. Remote Sens. 1999, 20, 2519–2543. [Google Scholar] [CrossRef]
- Graziano, M.D.; Rufino, G.; D’Errico, M. Wake-based ship route estimation in high-resolution SAR images. In Proceedings of the SPIE—The International Society for Optical Engineering, Amsterdam, The Netherlands, 22–25 September 2014; p. 12. [Google Scholar]
- Tings, B.; Velotto, D. Comparison of ship wake detectability on C-band and X-band SAR. Int. J. Remote Sens. 2018, 39, 4451–4468. [Google Scholar] [CrossRef]
- Arnold-bos, A.; Khenchaf, A.; Martin, A. An Evaluation of Current Ship Wake Detection Algorithms in SAR Images. Caractérisation du Milieu Marin. 2006, p. 8. Available online: http://people.irisa.fr/Arnaud.Martin/publi/ARNOLD_06b.pdf (accessed on 27 July 2020).
- Murphy, L.M. Linear feature detection and enhancement in noisy images via the Radon transform. Pattern Recognit. Lett. 1986, 4, 279–284. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Wake component detection in X-band SAR images for ship heading and velocity estimation. Remote Sens. 2016, 8, 498. [Google Scholar] [CrossRef]
- Rey, M.T.; Tunaley, J.K.; Folinsbee, J.T.; Jahans, P.A.; Dixon, J.A.; Vant, M.R. Application of Radon Transform Techniques to Wake Detection in Seasat-A SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Graziano, M.D.; Grasso, M.; D’Errico, M. Performance analysis of ship wake detection on Sentinel-1 SAR images. Remote Sens. 2017, 9, 1107. [Google Scholar] [CrossRef]
- Graziano, M.D. SAR-based ship route estimation by wake components detection and classification. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3255–3258. [Google Scholar]
- Karakuş, O.; Rizaev, I.; Achim, A. Ship Wake Detection in SAR Images via Sparse Regularization. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1665–1677. [Google Scholar] [CrossRef]
- Karakuş, O.; Achim, A. Ship Wake Detection in X-band SAR Images Using Sparse GMC Regularization. In Proceedings of the ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Hoff, UK, 12–17 May 2019; pp. 2182–2186. [Google Scholar]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L.W.; Meyer, R.G.V. Very deep learning for ship discrimination in Synthetic Aperture Radar imagery. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 104–107. [Google Scholar]
- Liu, Y.; Zhang, M.; Xu, P.; Guo, Z. SAR ship detection using sea-land segmentation-based convolutional neural network. In Proceedings of the 2017 International Workshop on Remote Sensing with Intelligent Processing (RSIP), Shanghai, China, 19–21 May 2017; pp. 1–4. [Google Scholar]
- Kang, M.; Ji, K.; Leng, X.; Lin, Z. Contextual region-based convolutional neural network with multilayer fusion for SAR ship detection. Remote Sens. 2017, 9, 860. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Kang, K.; Kim, D. Ship Velocity Estimation From Ship Wakes Detected Using Convolutional Neural Networks. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 4379–4388. [Google Scholar] [CrossRef]
- Roy, D.M.; Tunaley, J.K.E. Visibility of Turbulent Ship Wakes in Dual-Polarized RADARSAT-2 Imagery; Defence R&D: Ottawa, ON, Canada, 2010. [Google Scholar]
- Graziano, M.D.; D’Errico, M.; Rufino, G. Ship heading and velocity analysis by wake detection in SAR images. Acta Astronaut. 2016, 128, 72–82. [Google Scholar] [CrossRef]
- Ren, Y.; Lehner, S.; Brusch, S.; Li, X.; He, M. An algorithm for the retrieval of sea surface wind fields using X-band TerraSAR-X data. Int. J. Remote Sens. 2012, 33, 7310–7336. [Google Scholar] [CrossRef]
- Tings, B.; Pleskachevsky, A.; Velotto, D.; Jacobsen, S. Extension of Ship Wake Detectability Model for Non-Linear Influences of Parameters Using Satellite Based X-Band Synthetic Aperture Radar. Remote Sens. 2019, 11, 563. [Google Scholar] [CrossRef]
- Panico, A.; Graziano, M.D.; Renga, A. SAR-Based Vessel Velocity Estimation from Partially Imaged Kelvin Pattern. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2067–2071. [Google Scholar] [CrossRef]
- Graziano, M.D.; D’Errico, M.; Razzano, E. Constellation analysis of an integrated AIS/remote sensing spaceborne system for ship detection. Adv. Space Res. 2012, 50, 351–362. [Google Scholar] [CrossRef]
- TecSAR. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/t/tecsar (accessed on 21 August 2020).
- Risat. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/r/risat-2 (accessed on 21 August 2020).
- Iceye. Available online: www.iceye.com (accessed on 21 August 2020).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Epoch | June 9th, 2011-16:49 UTC |
|---|---|
| Mode | StripMap–Dual polarization |
| Level | L1B |
| Polarization | VV and VH (only VV used) |
| Range Resolution | 2.5 m |
| Azimuth Resolution | 6.5 m |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graziano, M.D. Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sens. 2020, 12, 2869. https://doi.org/10.3390/rs12182869
Graziano MD. Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sensing. 2020; 12(18):2869. https://doi.org/10.3390/rs12182869
Chicago/Turabian StyleGraziano, Maria Daniela. 2020. "Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images" Remote Sensing 12, no. 18: 2869. https://doi.org/10.3390/rs12182869
APA StyleGraziano, M. D. (2020). Preliminary Results of Ship Detection Technique by Wake Pattern Recognition in SAR Images. Remote Sensing, 12(18), 2869. https://doi.org/10.3390/rs12182869