Validation and Evaluation of a Ship Echo-Based Array Phase Manifold Calibration Method for HF Surface Wave Radar DOA Estimation and Current Measurement



Abstract
1. Introduction
2. Calibration Model and Method
2.1. Conventional Calibration Model
2.2. Modified Calibration Model
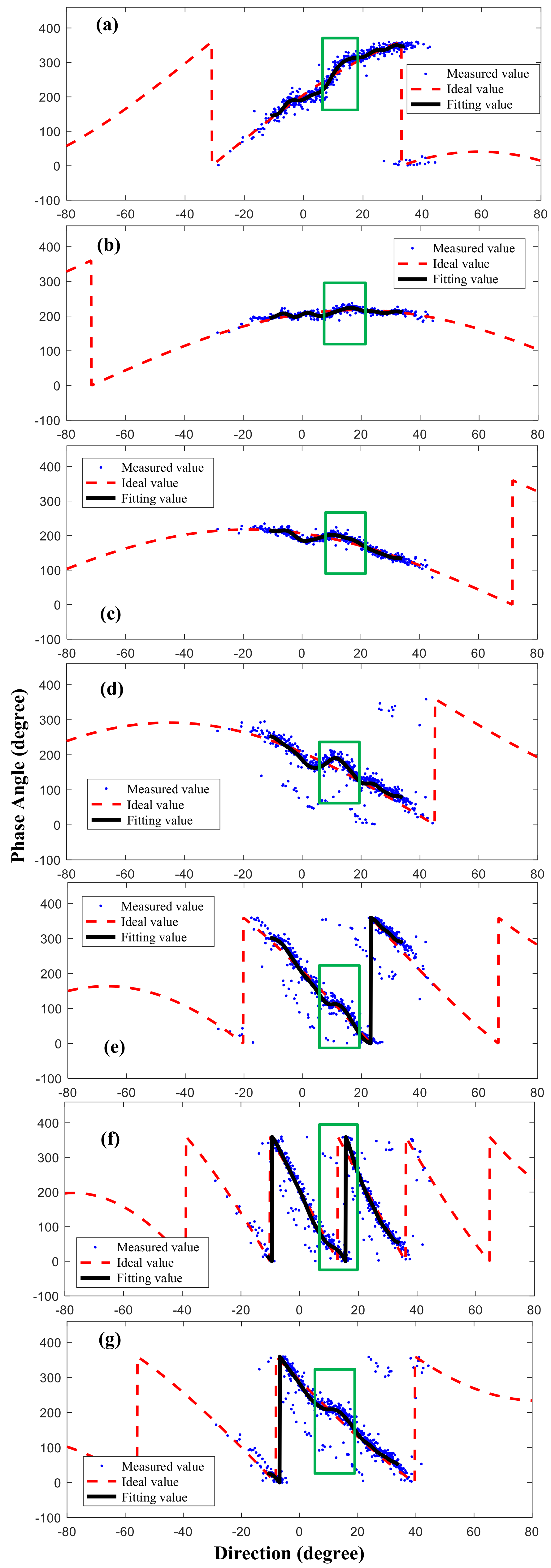
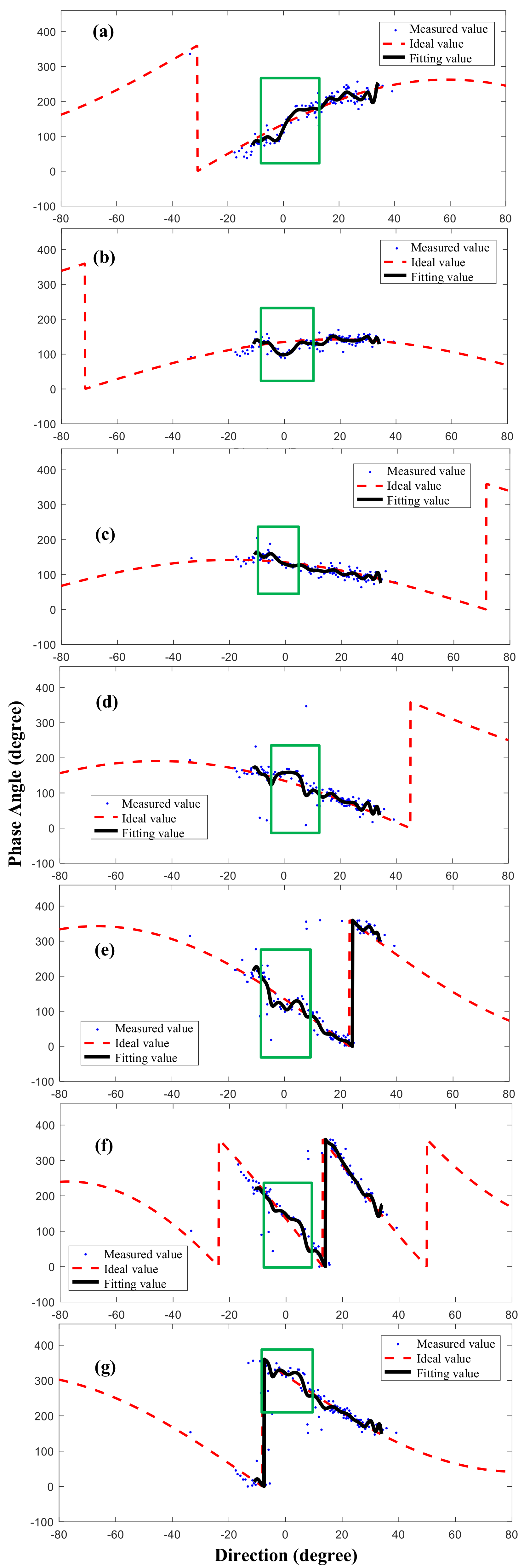
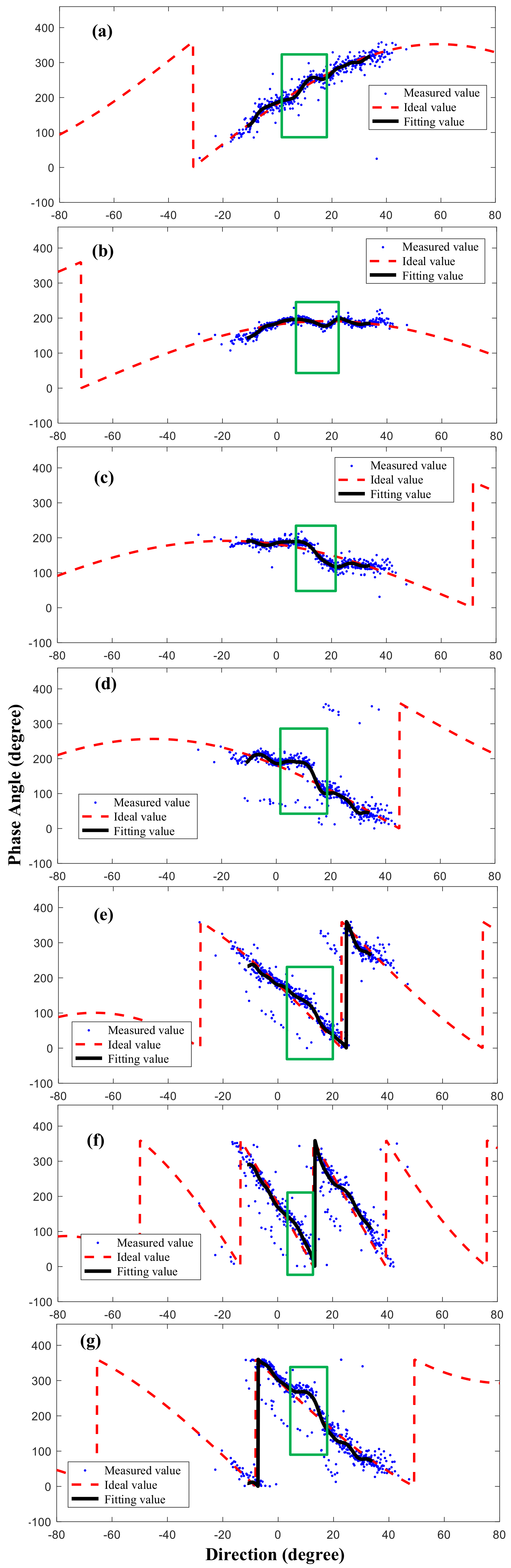
2.3. Array Phase Manifold Estimation
- Use the MU method to compensate the phase errors of the antenna array.
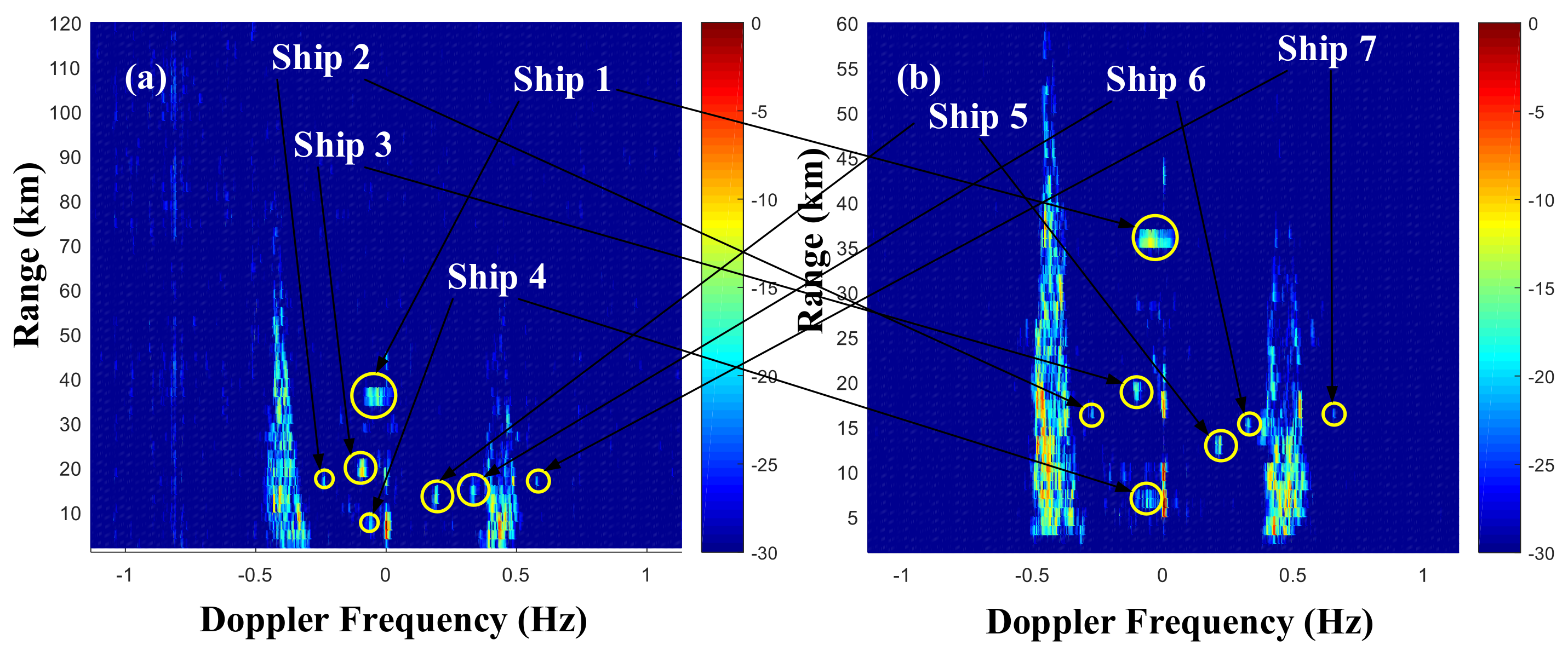
- Detect ships by applying a constant false alarm rate (CFAR)-based method [32] to the range-Doppler spectra.
- Discard the detected ship echoes in the first-order clutter zone. The Doppler frequency of the first-order clutter zone is assumed to be in the band from to and from to ( denotes the Doppler Bragg frequency).
- Obtain ship information, such as time, range, and radial velocity from both radar and AIS data.
- Determine whether the radar echoes obtained in Step 3 are ship echoes using AIS data.
- Calculate the phase data of the ship echoes by using Equations (10) and (11). From the AIS data the Doppler frequency of the individual ship, , can be calculated. If the ship peak exists in the frequency range from to ( denotes the Doppler frequency resolution), the individual ship is matched to the AIS data.
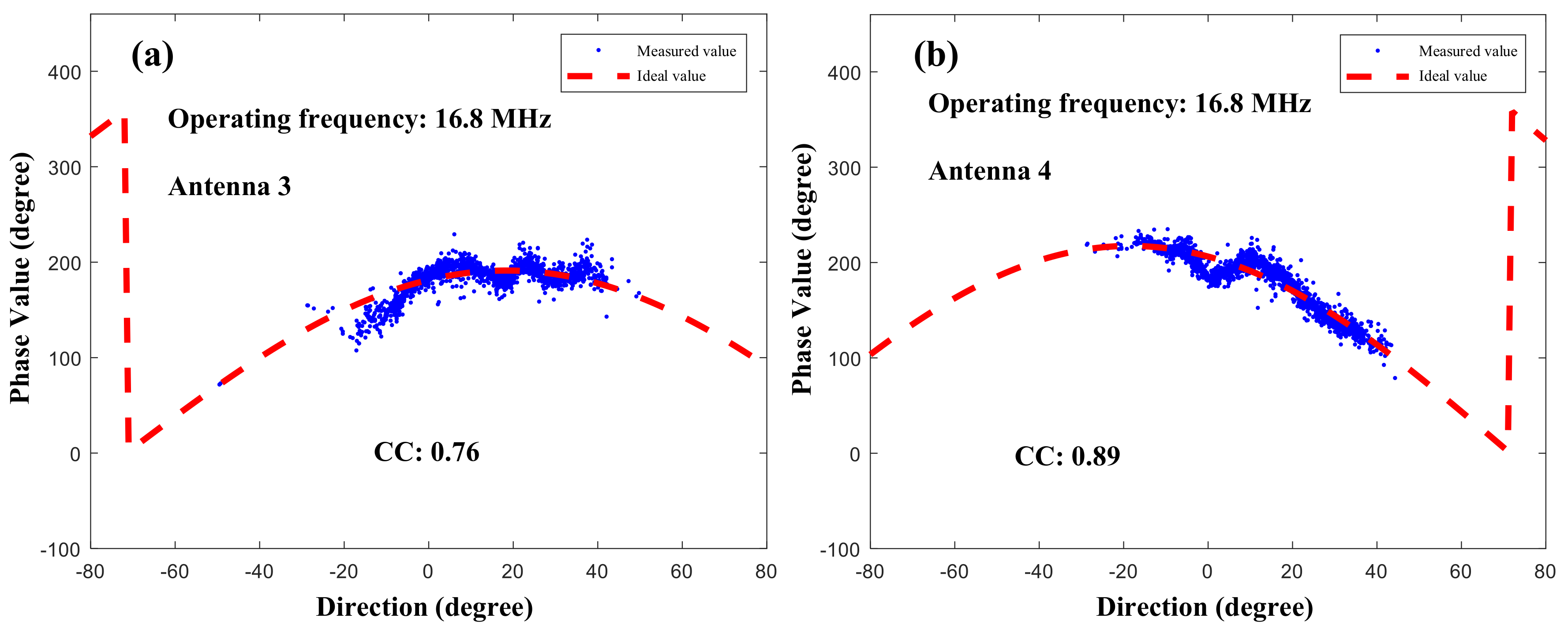
- Apply a least-squares fitting to ship echoes to obtain the phase angle of , then the array phase manifold is calculated.
2.4. DOA Estimation for Ship Detection and Current Measurement
3. Radar and Array Manifold Measurement
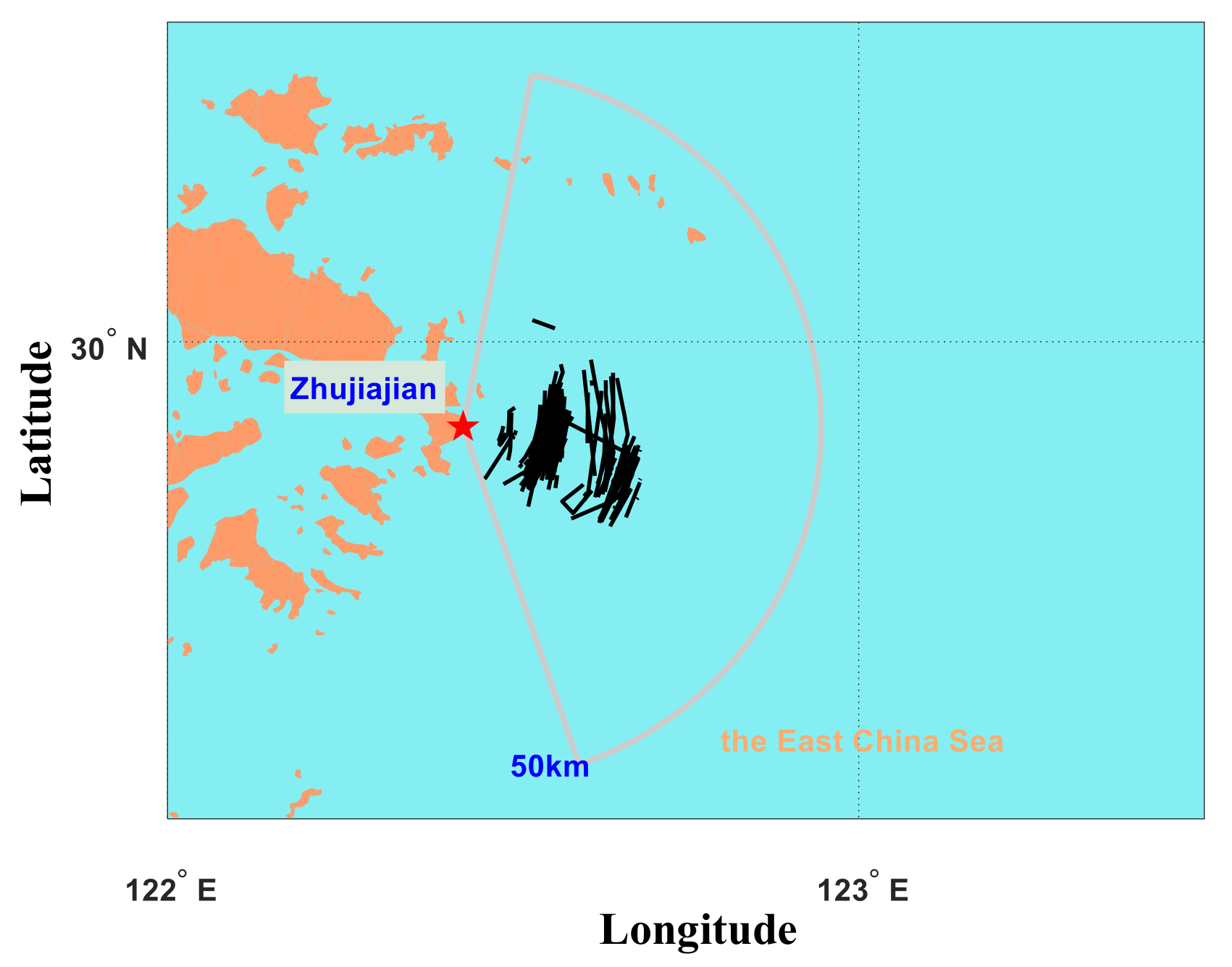
3.1. MHF Radar
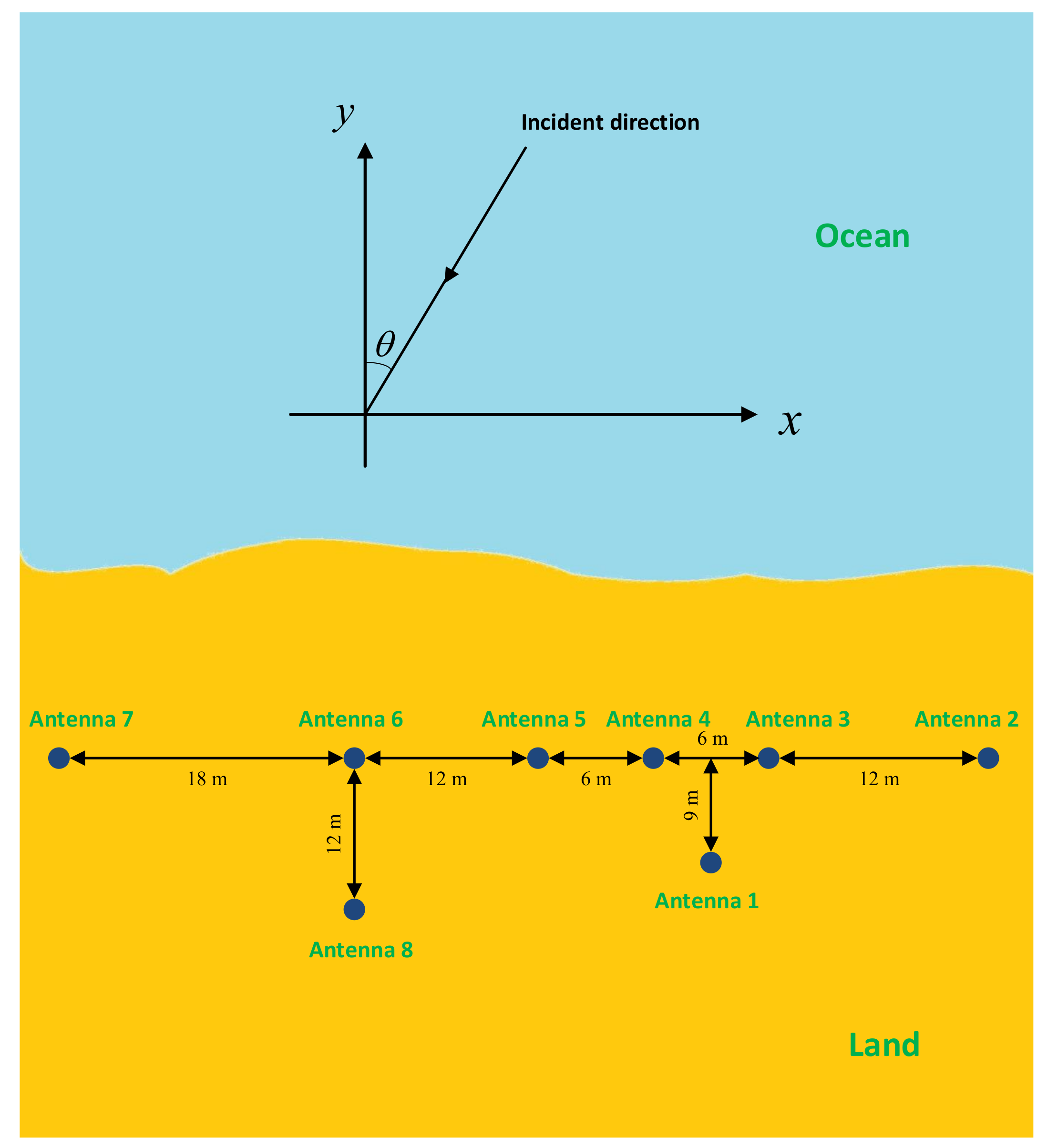
3.2. Array Manifold Measurement
4. Results
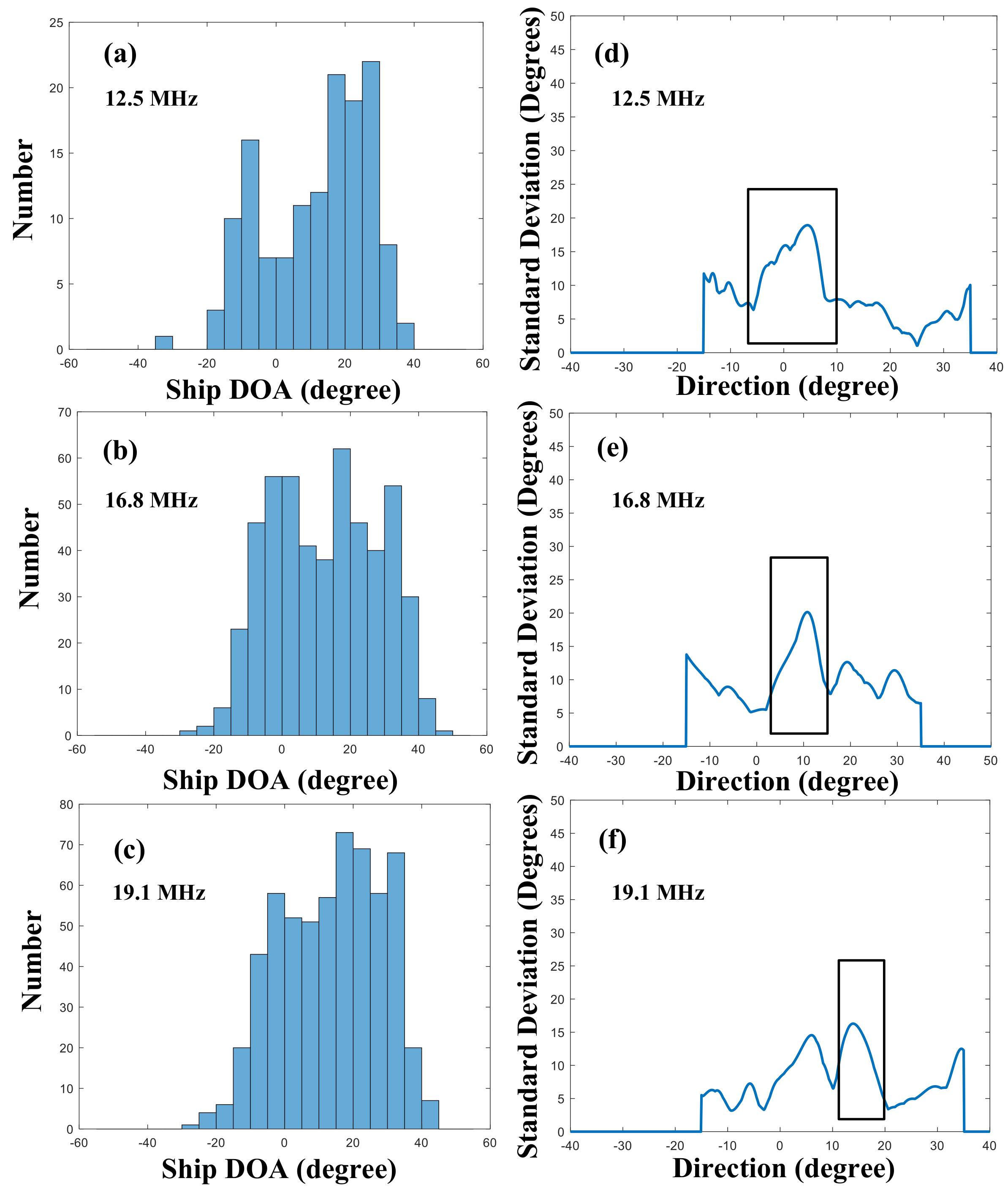
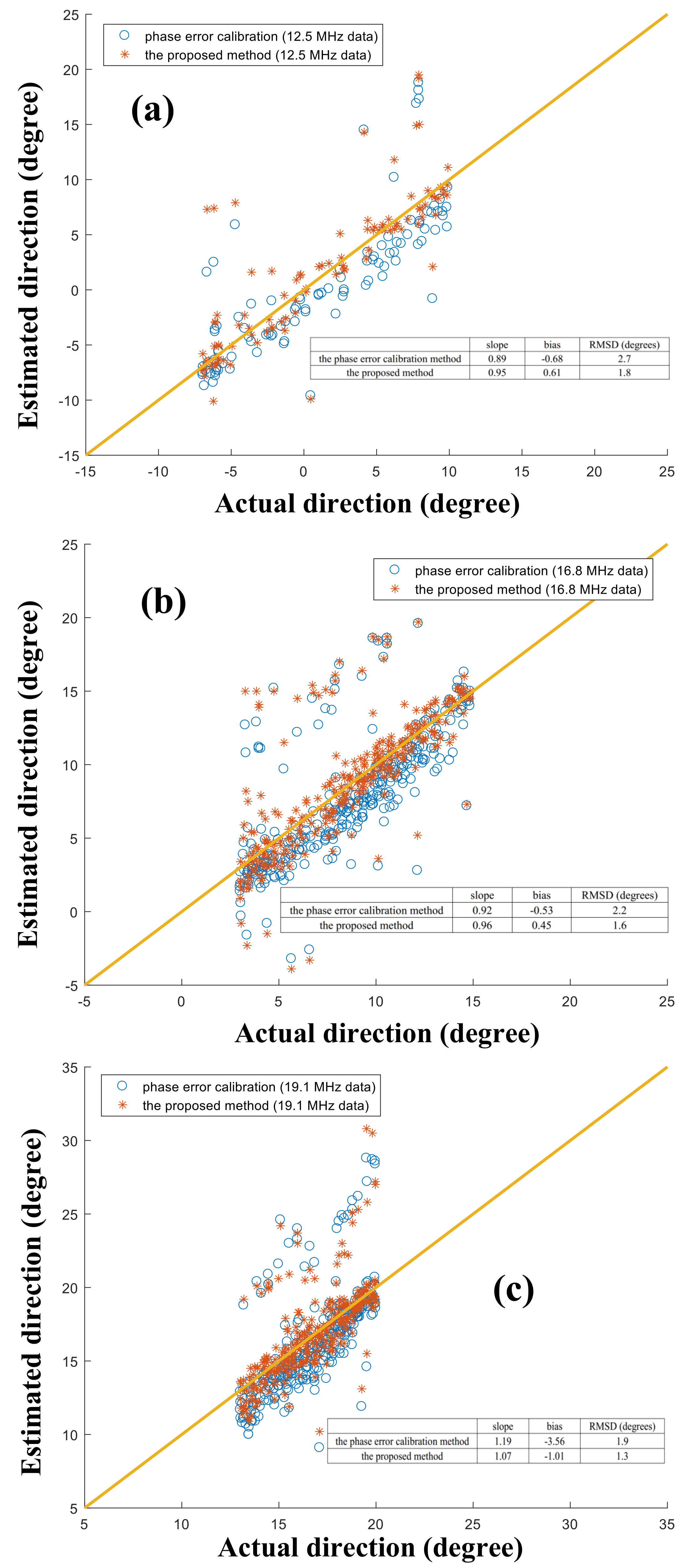
4.1. Ship DOA Estimation
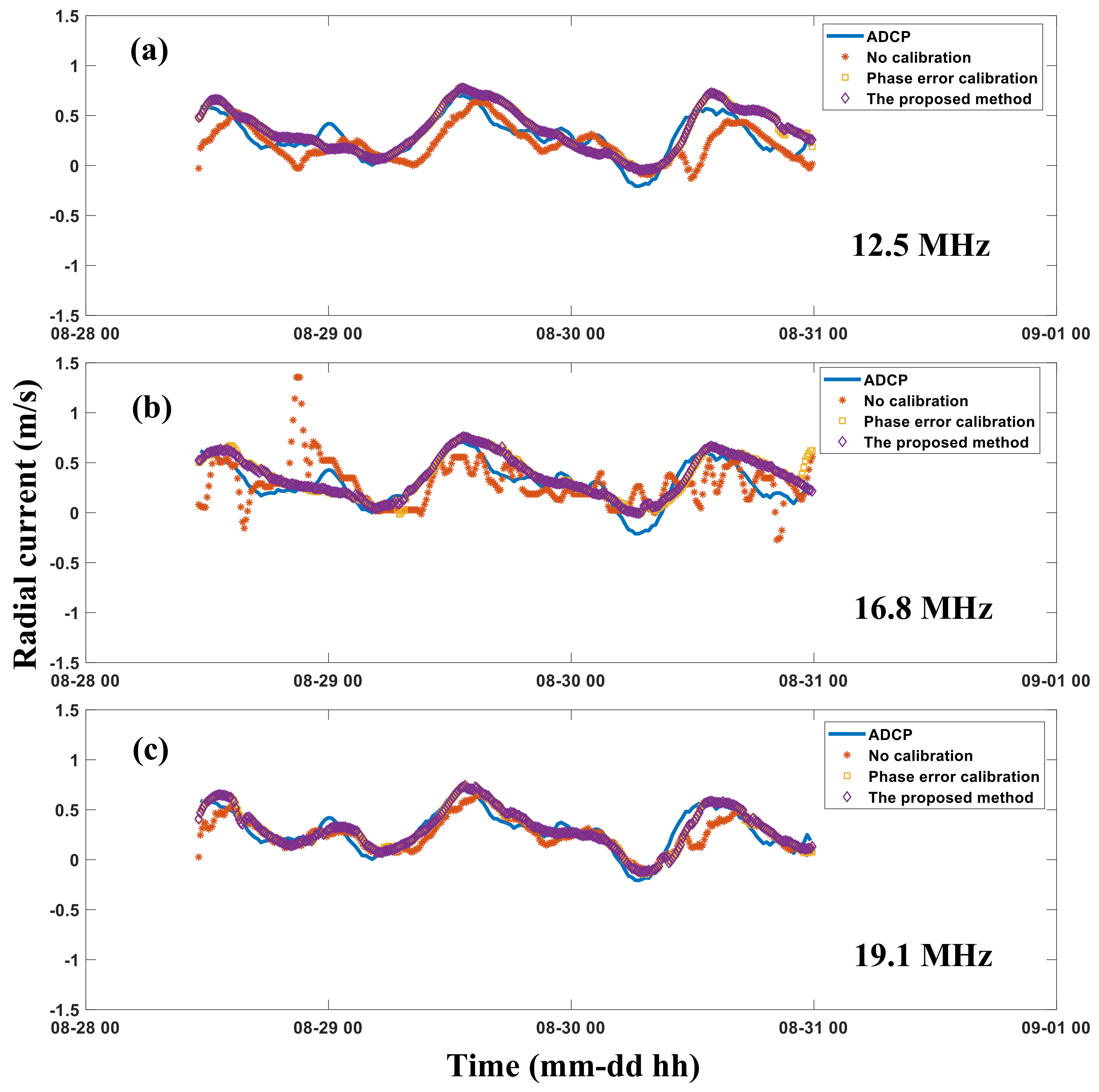
4.2. Current Measurements
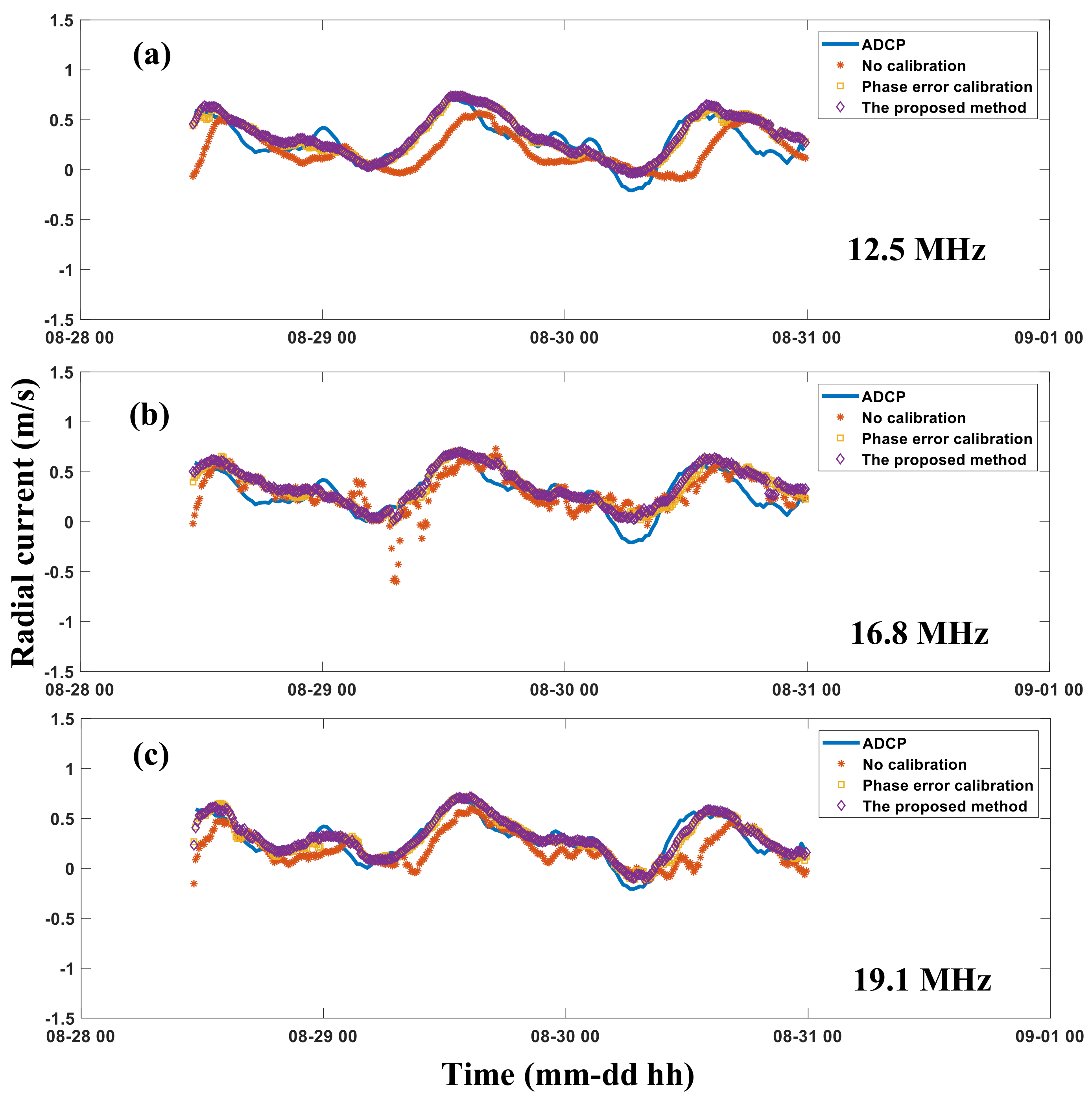
4.3. Current Measurements Using Four Receiving Elements
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DOA | Direction-of-arrival |
| MHF | Multi-frequency HF |
| AIS | Automatic Identification System |
| ADCP | Acoustic Doppler Current Profilers |
| MUSIC | MUltiple SIgnal Classification |
| WERA | WavE RAdar |
| OSMAR | Ocean State Monitor and Analysis Radar |
| SNR | Signal-to-noise Ratio |
| CFAR | Constant False Alarm Rate |
| FFT | Fast Fourier Transform |
| VTS | Vessel Traffic Services |
| RMSD | Root Mean Square Deviation |
| CC | Correlation coefficient |
References
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L.; Xie, F. Evaluating radial current measurement of multifrequency HF radar with multidepth ADCP data during a small storm. J. Atmos. Ocean. Technol. 2015, 32, 1071–1087. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, C.; Jiang, Y.; Hu, W. Wave measurements with multi-frequency HF radar in the East China Sea. J. Electromagn. Waves Appl. 2011, 25, 1031–1043. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; He, C.; Xie, F.; Chen, X. A Hybrid Beam-Forming and Direction-Finding Method for Wind Direction Sensing Based on HF Radar. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6622–6629. [Google Scholar] [CrossRef]
- Grosdidier, S.; Baussard, A.; Khenchaf, A. HFSW radar model: Simulation and measurement. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3539–3549. [Google Scholar] [CrossRef]
- Anderson, S.J. Optimizing HF Radar Siting for surveillance and remote sensing in the strait of Malacca. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1805–1816. [Google Scholar] [CrossRef]
- Le Caillec, J.M.; Mandridake, L. Influence of the waveform on propagation and sea radar cross section of HF radar signals. IEEE Trans. Antennas Propag. 2014, 62, 2721–2735. [Google Scholar]
- Chavanne, C.; Janeković, I.; Flament, P.; Poulain, P.M.; Kuzmić, M.; Gurgel, K.W. Tidal currents in the northwestern Adriatic: High-frequency radio observations and numerical model predictions. J. Geophys. Res. Ocean. 2007, 112. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R.; Lichtenwalner, S.; Kirkpatrick, G.J. HF radar performance in a low-energy environment: CODAR SeaSonde experience on the West Florida Shelf. J. Atmos. Ocean. Technol. 2010, 27, 1689–1710. [Google Scholar] [CrossRef]
- Paduan, J.D.; Washburn, L. High-frequency radar observations of ocean surface currents. Annu. Rev. Mar. Sci. 2013, 5, 115–136. [Google Scholar] [CrossRef]
- Dzvonkovskaya, A.; Rohling, H. HF radar performance analysis based on AIS ship information. In Proceedings of the 2010 IEEE Radar Conference, Washington DC, USA, 10–14 May 2010; pp. 1239–1244. [Google Scholar]
- Fernandez, D.M.; Vesecky, J.F.; Barrick, D.; Teague, C.C.; Plume, M.; Whelan, C. Detection of ships with multi-frequency and CODAR SeaSonde HF radar systems. Can. J. Remote Sens. 2001, 27, 277–290. [Google Scholar] [CrossRef]
- Wyatt, L.R.; Mantovanelli, A.; Heron, M.L.; Roughan, M.; Steinberg, C.R. Assessment of surface currents measured with high-frequency phased-array radars in two regions of complex circulation. IEEE J. Ocean. Eng. 2018, 43, 484–505. [Google Scholar] [CrossRef]
- Kamli, E.; Chavanne, C.; Dumont, D. Experimental assessment of the performance of high-frequency CODAR and WERA radars to measure ocean currents in partially ice-covered waters. J. Atmos. Ocean. Technol. 2016, 33, 539–550. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; He, C.; Xie, F.; Chen, X.; Mou, C. Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array. Remote Sens. 2018, 10, 184. [Google Scholar] [CrossRef]
- Gurgel, K.W.; Antonischki, G.; Essen, H.H.; Schlick, T. Wellen Radar (WERA): A new ground-wave HF radar for ocean remote sensing. Coast. Eng. 1999, 37, 219–234. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Jiang, Y.; Fan, L.; Zeng, G. Exploration and validation of wave-height measurement using multifrequency HF radar. J. Atmos. Ocean. Technol. 2013, 30, 2189–2202. [Google Scholar]
- Kirincich, A.; Emery, B.; Washburn, L.; Flament, P. Improving Surface Current Resolution Using Direction Finding Algorithms for Multiantenna High-Frequency Radars. J. Atmos. Ocean. Technol. 2019, 36, 1997–2014. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L. Evaluating two array autocalibration methods with multifrequency HF radar current measurements. J. Atmos. Ocean. Technol. 2015, 32, 1088–1097. [Google Scholar] [CrossRef]
- Schmid, C.M.; Schuster, S.; Feger, R.; Stelzer, A. On the effects of calibration errors and mutual coupling on the beam pattern of an antenna array. IEEE Trans. Antennas Propag. 2013, 61, 4063–4072. [Google Scholar] [CrossRef]
- Tian, Y.; Wen, B.; Tan, J.; Li, Z. Study on pattern distortion and DOA estimation performance of crossed-loop/monopole antenna in HF radar. IEEE Trans. Antennas Propag. 2017, 65, 6095–6106. [Google Scholar] [CrossRef]
- De Paolo, T.; Terrill, E. Skill assessment of resolving ocean surface current structure using compact-antenna-style HF radar and the MUSIC direction-finding algorithm. J. Atmos. Ocean. Technol. 2007, 24, 1277–1300. [Google Scholar] [CrossRef]
- Emery, B.M.; Washburn, L.; Whelan, C.; Barrick, D.; Harlan, J. Measuring antenna patterns for ocean surface current HF radars with ships of opportunity. J. Atmos. Ocean. Technol. 2014, 31, 1564–1582. [Google Scholar] [CrossRef]
- Weiss, A.J.; Friedlander, B. Eigenstructure methods for direction finding with sensor gain and phase uncertainties. Circuits Syst. Signal Process. 1990, 9, 271–300. [Google Scholar] [CrossRef]
- Fabrizio, G.; Gray, D.; Turley, M. Using sources of opportunity to compensate for receiver mismatch in HF arrays. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 310–316. [Google Scholar] [CrossRef]
- Xiongbin, W.; Feng, C.; Zijie, Y.; Hengyu, K. Broad beam HFSWR array calibration using sea echoes. In Proceedings of the International Conference on Radar, CIE’06, Shanghai, China, 16–19 October 2006; pp. 1–3. [Google Scholar]
- Fernandez, D.M.; Vesecky, J.F.; Teague, C. Phase corrections of small-loop HF radar system receive arrays with ships of opportunity. IEEE J. Ocean. Eng. 2006, 31, 919–921. [Google Scholar] [CrossRef]
- Flores-Vidal, X.; Flament, P.; Durazo, R.; Chavanne, C.; Gurgel, K.W. High-frequency radars: Beamforming calibrations using ships as reflectors. J. Atmos. Ocean. Technol. 2013, 30, 638–648. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, G.; Zhao, C.; Zhang, L. A Phase Error Estimation Method for Broad Beam High-Frequency Radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1526–1530. [Google Scholar] [CrossRef]
- Byun, G.; Choo, H. A Novel Approach to Array Manifold Calibration Using Single-Direction Information for Accurate Direction-of-Arrival Estimation. IEEE Trans. Antennas Propag. 2017, 65, 4952–4957. [Google Scholar] [CrossRef]
- Pralon, M.G.; Del Galdo, G.; Landmann, M.; Hein, M.A.; Thomä, R.S. Suitability of Compact Antenna Arrays for Direction-of-Arrival Estimation. IEEE Trans. Antennas Propag. 2017, 65, 7244–7256. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, L.; Zhao, C.; Li, J. Calibration and Evaluation of a Circular Antenna Array for HF Radar Based on AIS Information. IEEE Geosci. Remote. Sens. Lett. 2020, 17, 988–992. [Google Scholar] [CrossRef]
- Maresca, S.; Braca, P.; Horstmann, J.; Grasso, R. Maritime surveillance using multiple high-frequency surface-wave radars. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5056–5071. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Operating frequency range (MHz) | 7.5–25 |
| Number of operating frequencies | ≤4 |
| Transmitter peak power (W) | 300 |
| Range cell resolution (km) | 1–5 |
| Doppler sampling cycle (s) | 0.4–0.6 |
| Measurement cycle (min) | 10 |
| Operating Frequency | Ship Number | RMSD (degrees) | ||
|---|---|---|---|---|
| No Calibration | Phase Error Calibration | The APM Method | ||
| 12.5 MHz | 467 | 18.3 | 1.6 | 1.3 |
| 16.8 MHz | 1638 | 22.8 | 1.8 | 1.5 |
| 19.1 MHz | 1855 | 24.9 | 1.6 | 1.4 |
| Operating Frequency | Ship Number | Bearing Range | RMSD (degrees) | |
|---|---|---|---|---|
| Phase Error Calibration | The APM Method | |||
| 12.5 MHz | 96 | from to | 2.7 | 1.8 |
| 16.8 MHz | 302 | from 3 to | 2.2 | 1.6 |
| 19.1 MHz | 290 | from 13 to | 1.9 | 1.3 |
| Operating Frequency | No Calibration | Phase Error Calibration | The APM Method | |||
|---|---|---|---|---|---|---|
| CC | RMSD (cm/s) | CC | RMSD (cm/s) | CC | RMSD (cm/s) | |
| 12.5 MHz | 0.65 | 17.5 | 0.83 | 13.1 | 0.86 | 12.6 |
| 16.8 MHz | 0.40 | 22.4 | 0.82 | 13.1 | 0.86 | 12.6 |
| 19.1 MHz | 0.81 | 12.7 | 0.91 | 9.1 | 0.93 | 8.4 |
| Operating Frequency | No Calibration | Phase Error Calibration | The APM Method | |||
|---|---|---|---|---|---|---|
| CC | RMSD (cm/s) | CC | RMSD (cm/s) | CC | RMSD (cm/s) | |
| 12.5 MHz | 0.43 | 22.8 | 0.82 | 14.3 | 0.85 | 13.1 |
| 16.8 MHz | 0.57 | 18.7 | 0.82 | 14.6 | 0.86 | 13.1 |
| 19.1 MHz | 0.63 | 18.6 | 0.89 | 9.2 | 0.92 | 8.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Chen, Z.; Li, J.; Ding, F.; Huang, W.; Fan, L. Validation and Evaluation of a Ship Echo-Based Array Phase Manifold Calibration Method for HF Surface Wave Radar DOA Estimation and Current Measurement. Remote Sens. 2020, 12, 2761. https://doi.org/10.3390/rs12172761
Zhao C, Chen Z, Li J, Ding F, Huang W, Fan L. Validation and Evaluation of a Ship Echo-Based Array Phase Manifold Calibration Method for HF Surface Wave Radar DOA Estimation and Current Measurement. Remote Sensing. 2020; 12(17):2761. https://doi.org/10.3390/rs12172761
Chicago/Turabian StyleZhao, Chen, Zezong Chen, Jian Li, Fan Ding, Weimin Huang, and Lingang Fan. 2020. "Validation and Evaluation of a Ship Echo-Based Array Phase Manifold Calibration Method for HF Surface Wave Radar DOA Estimation and Current Measurement" Remote Sensing 12, no. 17: 2761. https://doi.org/10.3390/rs12172761
APA StyleZhao, C., Chen, Z., Li, J., Ding, F., Huang, W., & Fan, L. (2020). Validation and Evaluation of a Ship Echo-Based Array Phase Manifold Calibration Method for HF Surface Wave Radar DOA Estimation and Current Measurement. Remote Sensing, 12(17), 2761. https://doi.org/10.3390/rs12172761