A Novel Ship Imaging Method with Multiple Sinusoidal Functions to Match Rotation Effects in Geosynchronous SAR



Abstract
1. Introduction
2. The Signal Model of a Rotating Ship in GEO SAR
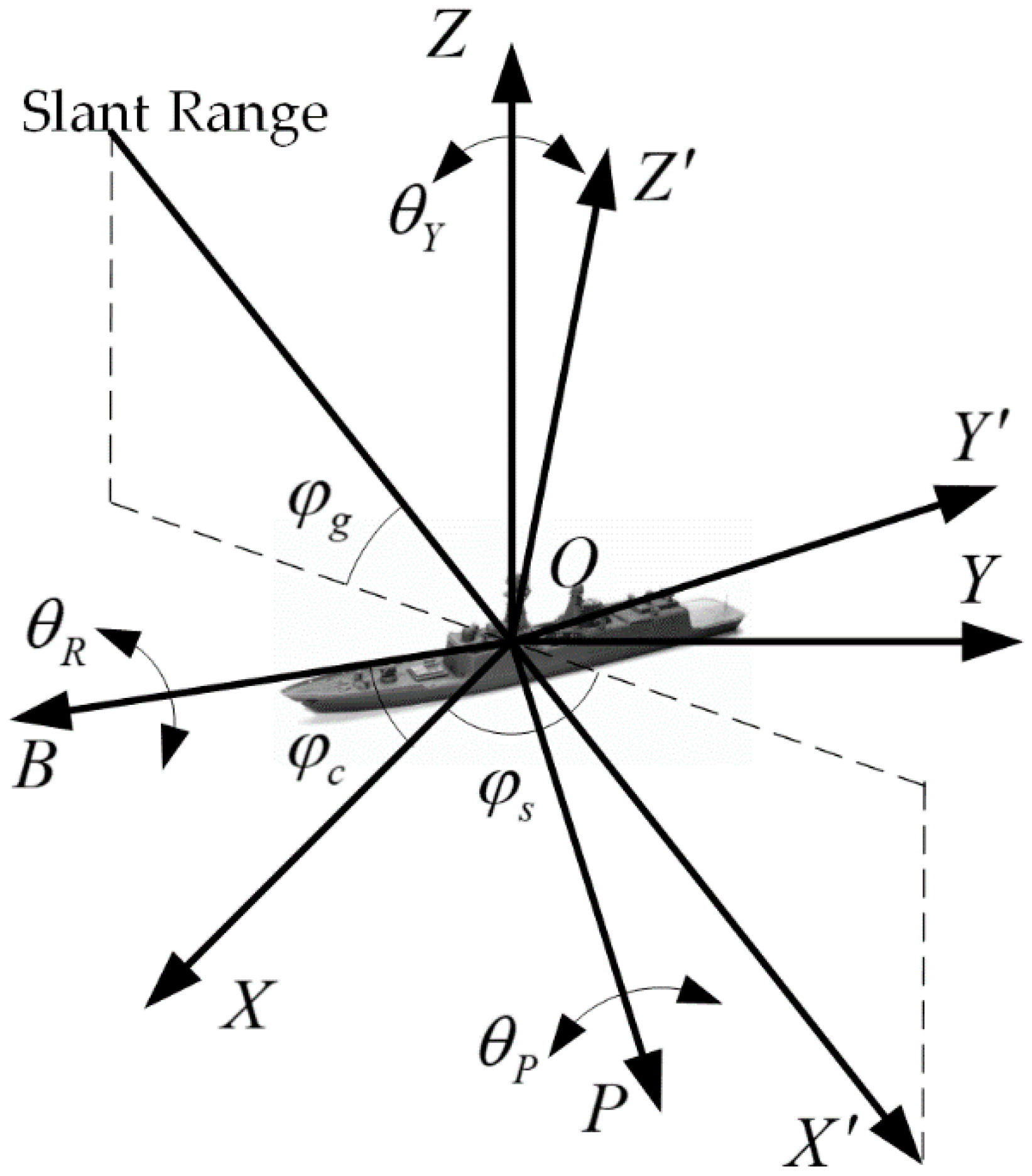
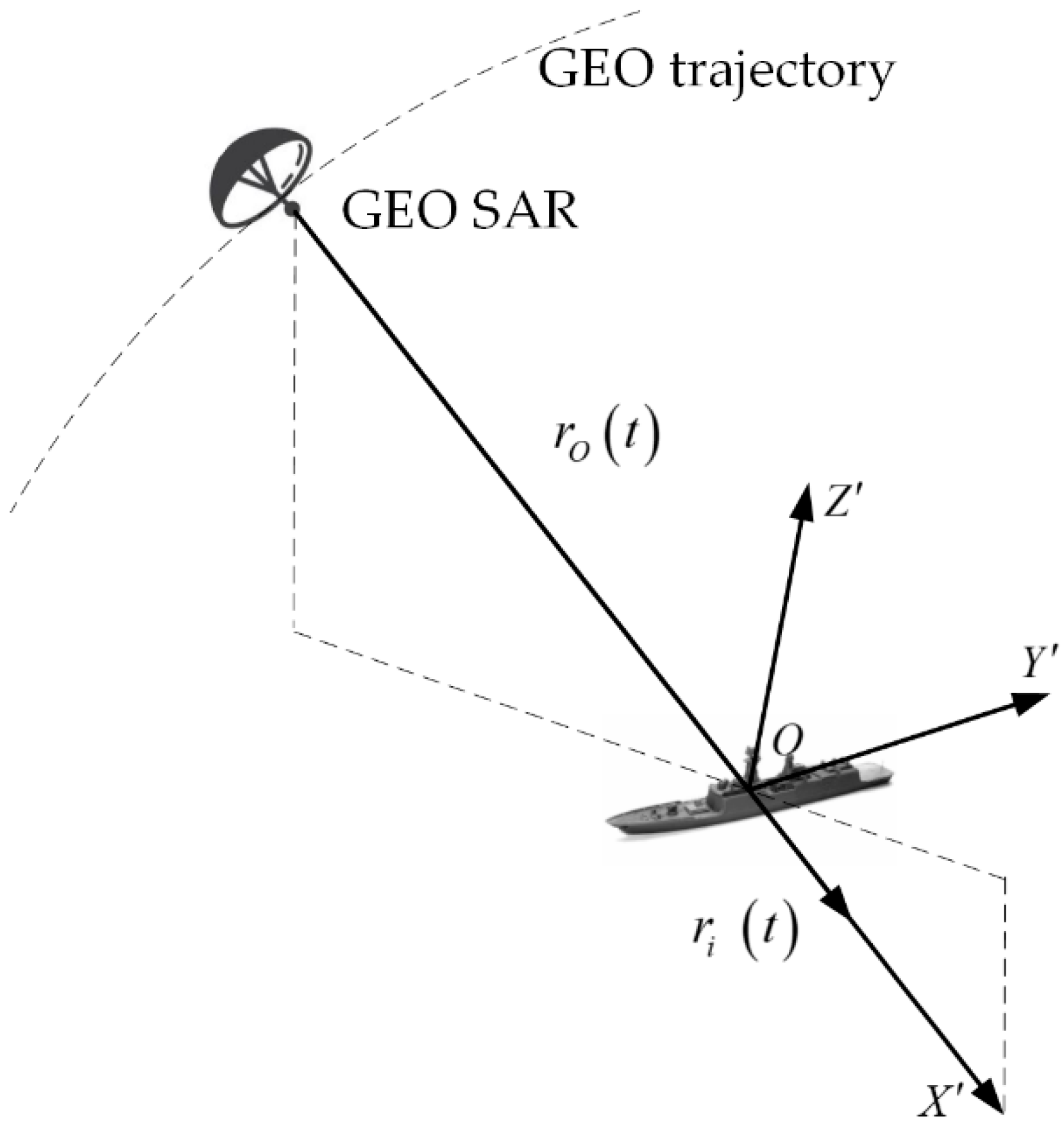
2.1. The Geometry of a Rotating Ship
2.2. The Influence of the Rotation Effect
2.3. The Signal Model of a Ship with Rotational Motion
3. The Rotational Ship Imaging Method Based on the Matching of Multiple Sinusoidal Functions
3.1. The Rotation Effect Matching and Ship Imaging Procedure
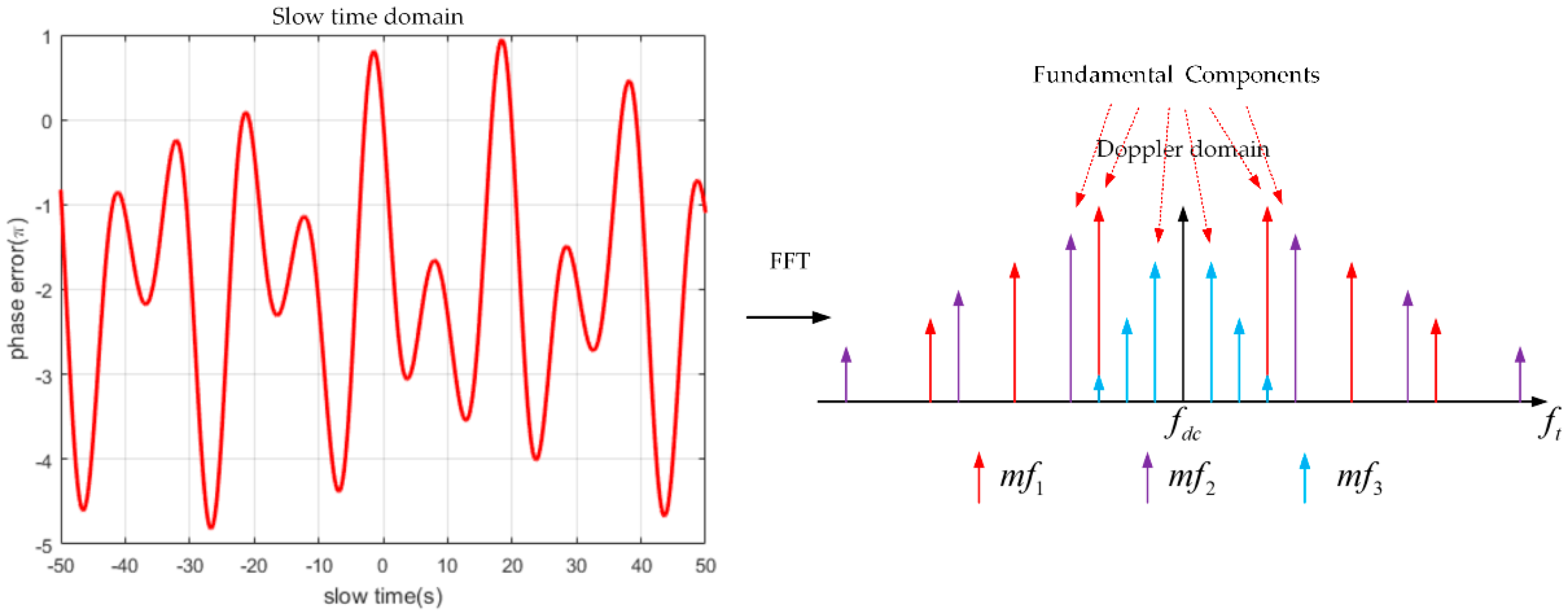
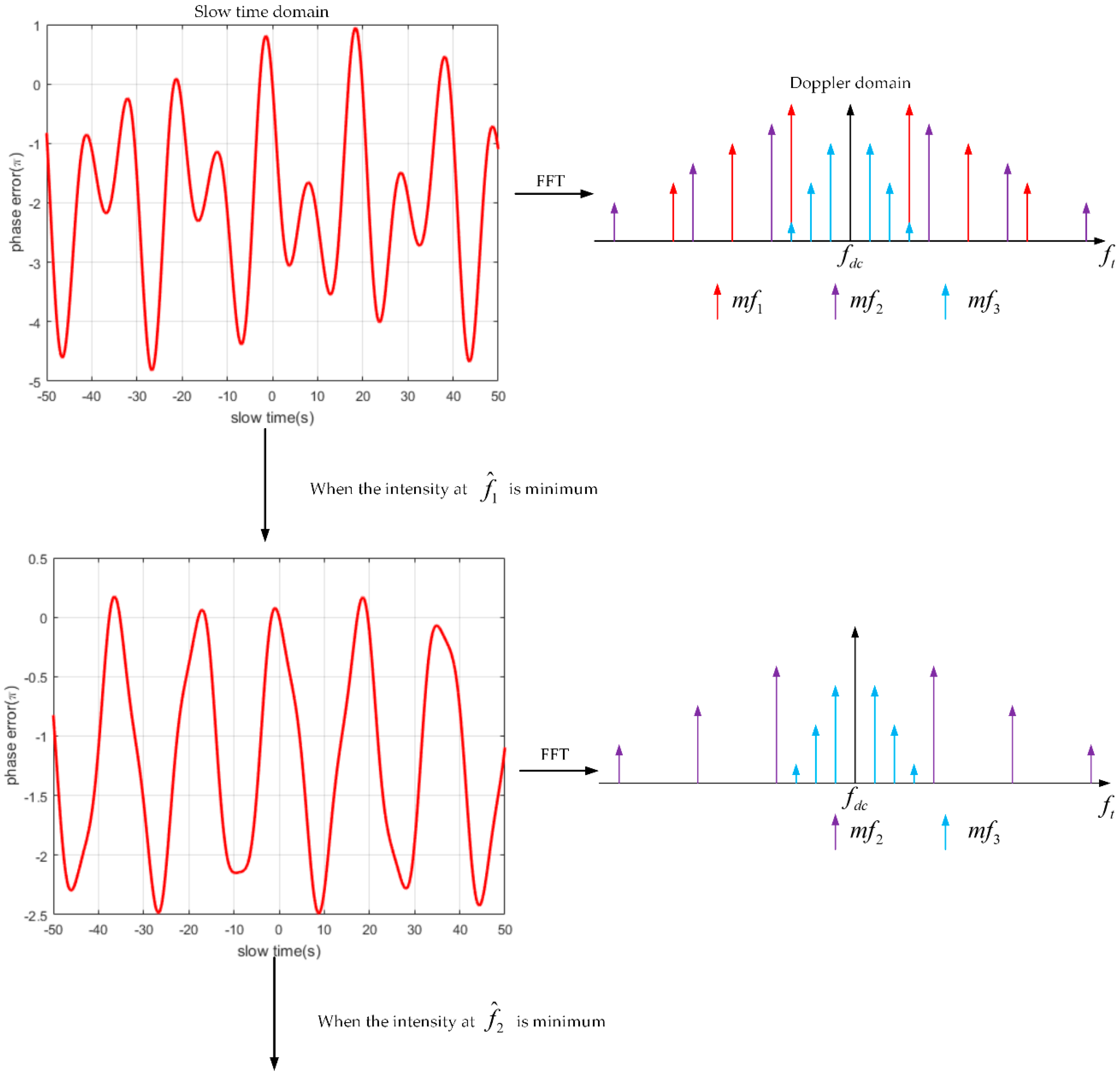
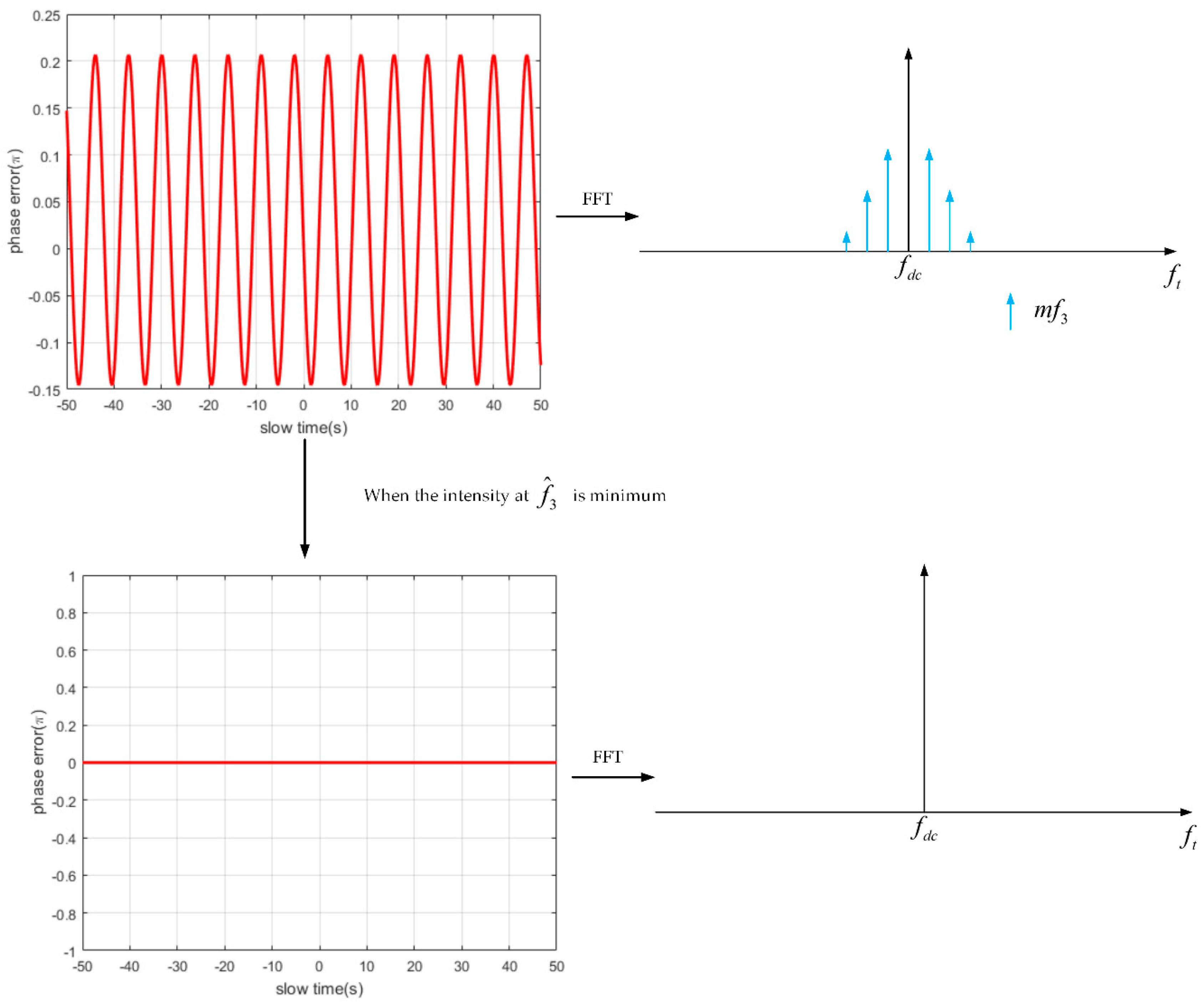
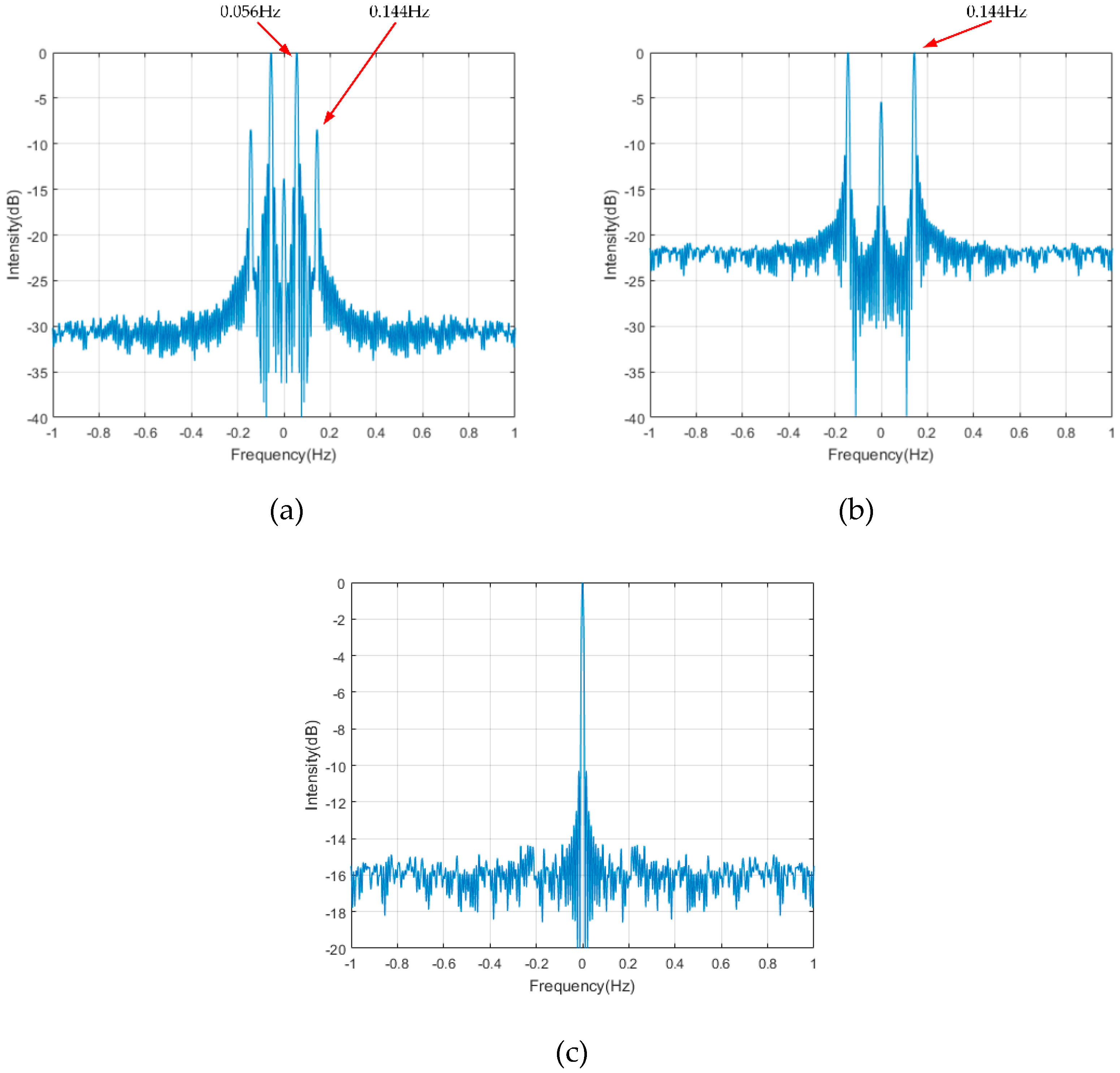
3.2. Matching the Frequencies of Sinusoidal Function
3.3. Matching the Amplitudes and Initial Phases of Sinusoidal Function
3.4. Ship Imaging with BPA and Matched Parameters of Sinusoidal Functions
4. Simulation Results and Discussion
4.1. Simulation Results for Matching the Frequencies of Sinusoidal Function
4.2. Simulation Results for Matching the Amplitudes and Initial Phases of the Sinusoidal Function
4.3. The Simulation Results for the BPA
4.4. The Simulation Results for the Proposed Rotating Ship Imaging Method
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. The Effectiveness of (12) and the Residual Error with Different Numbers of Sinusoidal Functions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Value | ||
|---|---|---|---|
| Roll | Pitch | Yaw | |
| The amplitudes of 3D rotation, , rad | 0.0873 (5°) | 0.0698 (4°) | 0.0698 (4°) |
| The frequencies of 3D rotation, , Hz | 1/12 | 1/10 | 1/14 |
| The initial phases of 3D rotation, , rad | 1.048 (60°) | 0.524 (30°) | 0 (0°) |
| The angle between the slant range and -axis, | 100° | ||
| The grazing angle, | 60° | ||


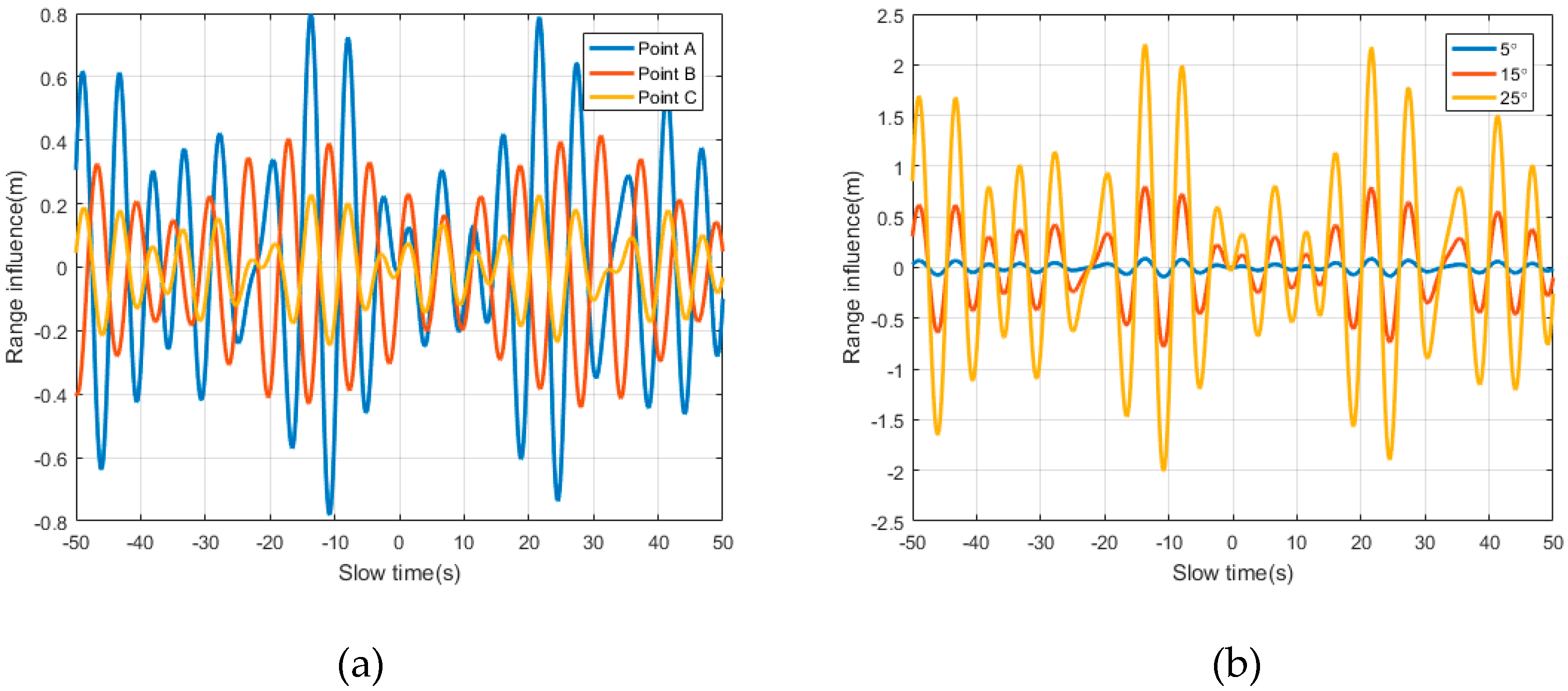
Appendix B. The Influence of Rotation Effect on the Range Cell Migration
| Specifications | Value | ||
|---|---|---|---|
| The ship’s coordinate system , m | |||
| Scatter point A | 100 | 100 | 10 |
| Scatter point B | −50 | −25 | 6 |
| Scatter point C | 25 | −15 | 5 |

References
- Skolnik, M. Radar Handbook, 3rd ed.; IEEE: Piscataway, NJ, USA, 2008; pp. 129–130. [Google Scholar]
- Stephan, B.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship Surveillance with Terrasar-X. IEEE Transact. Geosci.Remote Sens. 2011, 49, 1092–1103. [Google Scholar]
- Song, S.; Xu, B.; Yang, J. Ship Detection in Polarimetric SAR Images via Variational Bayesian Inference. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2819–2829. [Google Scholar] [CrossRef]
- Ao, W.; Xu, F.; Li, Y.; Wang, H. Detection and Discrimination of Ship Targets in Complex Background From Spaceborne ALOS-2 SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 536–550. [Google Scholar] [CrossRef]
- Pelich, R.; Longépé, N.; Mercier, G.; Hajduch, G.; Garello, R. Vessel Refocusing and Velocity Estimation on SAR Imagery Using the Fractional Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2015, 54, 1670–1684. [Google Scholar] [CrossRef]
- Madsen, S.; Edelstein, W.; di Domenico, L.D.; Labrecque, J. A geosynchronous synthetic aperture radar; for tectonic mapping, disaster management and measurements of vegetation and soil moisture. In Proceedings of the IGARSS 2001, Scanning the Present and Resolving the Future. Proceedings. IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002. [Google Scholar]
- NASA; JPL. Global Earthquake Satellite System: A 20-Year Plan to Enable Earthquake Prediction; California Institute of Technology: Pasadena, CA, USA, 2003.
- Bruno, D.; Hobbs, S. Radar Imaging From Geosynchronous Orbit: Temporal Decorrelation Aspects. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2924–2929. [Google Scholar] [CrossRef]
- Ruiz-Rodon, J.; Broquetas, A.; Makhoul, E.; Guarnieri, A.M.; Rocca, F. Nearly Zero Inclination Geosynchronous SAR Mission Analysis With Long Integration Time for Earth Observation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6379–6391. [Google Scholar] [CrossRef]
- Hobbs, S.; Mitchell, C.N.; Forte, B.; Holley, R.; Snapir, B.; Whittaker, P. System Design for Geosynchronous Synthetic Aperture Radar Missions. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7750–7763. [Google Scholar] [CrossRef]
- Li, Y.; Guarnieri, A.M.; Hu, C.; Rocca, F. Performance and Requirements of GEO SAR Systems in the Presence of Radio Frequency Interferences. Remote Sens. 2018, 10, 82. [Google Scholar] [CrossRef]
- Fuster, R.M.; Usón, M.F.; Ibars, A.B. Interferometric orbit determination for geostationary satellites. Sci. China Inf. Sci. 2017, 60, 060302. [Google Scholar] [CrossRef]
- Hu, C.; Long, T.; Zeng, T.; Liu, F.; Liu, Z. The Accurate Focusing and Resolution Analysis Method in Geosynchronous SAR. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3548–3563. [Google Scholar] [CrossRef]
- Ding, Z.; Shu, B.; Yin, W.; Zeng, T.; Long, T. A Modified Frequency Domain Algorithm Based on Optimal Azimuth Quadratic Factor Compensation for Geosynchronous SAR Imaging. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 1119–1131. [Google Scholar] [CrossRef]
- Sun, G.; Xing, M.; Wang, Y.; Yang, J.; Bao, Z. A 2-D Space-Variant Chirp Scaling Algorithm Based on the RCM Equalization and Subband Synthesis to Process Geosynchronous SAR Data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4868–4880. [Google Scholar] [CrossRef]
- Yin, W.; Ding, Z.; Lu, X.; Zhu, Y. Beam scan mode analysis and design for geosynchronous SAR. Sci. China Inf. Sci. 2017, 60, 060306. [Google Scholar] [CrossRef]
- Hu, C.; Li, Y.; Dong, X.; Wang, R.; Li, Y. Performance Analysis of L-Band Geosynchronous SAR Imaging in the Presence of Ionospheric Scintillation. IEEE Trans. Geosci. Remote Sens. 2016, 55, 159–172. [Google Scholar] [CrossRef]
- Hu, C.; Li, Y.; Dong, X.; Li, Y. Avoiding the Ionospheric Scintillation Interference on Geosynchronous SAR by Orbit Optimization. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1676–1680. [Google Scholar] [CrossRef]
- Li, D.; Rodriguez-Cassola, M.; Prats-Iraola, P.; Dong, Z.; Wu, M.; Moreira, A. Modelling of tropospheric delays in geosynchronous synthetic aperture radar. Sci. China Inf. Sci. 2017, 60, 060307. [Google Scholar] [CrossRef]
- Hu, C.; Li, Y.; Dong, X.; Long, T. Optimal Data Acquisition and Height Retrieval in Repeat-Track Geosynchronous SAR Interferometry. Remote Sens. 2015, 7, 13367–13389. [Google Scholar] [CrossRef]
- Hu, C.; Li, Y.; Dong, X.; Wang, R.; Cui, C. Optimal 3D deformation measuring in inclined geosynchronous orbit SAR differential interferometry. Sci. China Inf. Sci. 2017, 60, 060303. [Google Scholar] [CrossRef]
- Hu, C.; Ao, D.; Dong, X.; Cui, C.; Long, T. Impacts of Temporal-Spatial Variant Background Ionosphere on Repeat-Track GEO D-InSAR System. Remote Sens. 2016, 8, 916. [Google Scholar] [CrossRef]
- Zheng, W.; Hu, J.; Zhang, W.; Yang, C.; Li, Z.; Zhu, J. Potential of geosynchronous SAR interferometric measurements in estimating three-dimensional surface displacements. Sci. China Inf. Sci. 2017, 60, 060304. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, W.; Dong, X.; Hu, C. A Novel Azimuth Spectrum Reconstruction and Imaging Method for Moving Targets in Geosynchronous Spaceborne-Airborne Bistatic Multichannel SAR. IEEE Trans. Geosci. Remote Sens. 2020, 1–16. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, W.; Dong, X.; Hu, C.; Sun, Y. GRFT-Based Moving Ship Target Detection and Imaging in Geosynchronous SAR. Remote Sens. 2018, 10, 2002. [Google Scholar] [CrossRef]
- Melzi, M.; Hu, C.; Dong, X.; Li, Y.; Cui, C. Velocity Estimation of Multiple Moving Targets in Single-Channel Geosynchronous SAR. IEEE Trans. Geosci. Remote Sens. 2020, 1–19. [Google Scholar] [CrossRef]
- Liu, P.; Jin, Y.-Q. A Study of Ship Rotation Effects on SAR Image. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3132–3144. [Google Scholar] [CrossRef]
- Cui, W.; Tian, J.; Xia, X.-G.; Wu, S. An Approach for Parameter Estimation of Maneuvering Targets With Nonlinear Motions. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 67–83. [Google Scholar] [CrossRef]
- Gaffar, M.; Nel, W.; Inggs, M. Selecting Suitable Coherent Processing Time Window Lengths for Ground-Based ISAR Imaging of Cooperative Sea Vessels. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3231–3240. [Google Scholar] [CrossRef]
- Martorella, M.; Berizzi, F. Time windowing for highly focused ISAR image reconstruction. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 992–1007. [Google Scholar] [CrossRef]
- Bao, Z.; Sun, C.; Xing, M. Time-frequency approaches to ISAR imaging of maneuvering targets and their limitations. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 1091–1099. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. ISAR Imaging of Maneuvering Target Based on the L-Class of Fourth-Order Complex-Lag PWVD. IEEE Trans. Geosci. Remote Sens. 2009, 48, 1518–1527. [Google Scholar] [CrossRef]
- Xia, X.-G.; Wang, G.; Chen, V. Quantitative SNR analysis for ISAR imaging using joint time-frequency analysis-Short time Fourier transform. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 649–659. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, Y. ISAR Imaging of a Ship Target Using Product High-Order Matched-Phase Transform. IEEE Geosci. Remote Sens. Lett. 2009, 6, 658–661. [Google Scholar] [CrossRef]
- Ding, Z.; Zhang, T.; Li, Y.; Li, G.; Dong, X.; Zeng, T.; Ke, M. A Ship ISAR Imaging Algorithm Based on Generalized Radon-Fourier Transform With Low SNR. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6385–6396. [Google Scholar] [CrossRef]
- Hajduch, G.; le Caillec, J.M.; Garello, R. Airborne high-resolution isar imaging of ship targets at sea. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 378–384. [Google Scholar] [CrossRef]
- Li, C.; Lin, J. Microwave Noncontact Motion Sensing and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Chen, V.; Li, F.; Ho, S.S.; Wechsler, H. Micro-doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Ruegg, M.; Meier, E.; Nuesch, D. Vibration and Rotation in Millimeter-Wave SAR. IEEE Trans. Geosci. Remote Sens. 2007, 45, 293–304. [Google Scholar] [CrossRef]
- Wang, Q.; Pepin, M.; Beach, R.J.; Dunkel, R.; Atwood, T.; Santhanam, B.; Gerstle, W.; Doerry, A.W.; Hayat, M.M. SAR-Based Vibration Estimation Using the Discrete Fractional Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4145–4156. [Google Scholar] [CrossRef]
- Peng, B.; Wei, X.; Deng, B.; Chen, H.; Liu, Z.; Li, X. A Sinusoidal Frequency Modulation Fourier Transform for Radar-Based Vehicle Vibration Estimation. IEEE Trans. Instrum. Meas. 2014, 63, 2188–2199. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Zhao, B.; Xu, L. Compensation for High-Frequency Vibration of Platform in SAR Imaging Based on Adaptive Chirplet Decomposition. IEEE Geosci. Remote Sens. Lett. 2016, 13, 792–795. [Google Scholar] [CrossRef]
- Campbell, J.B.; Pérez, F.; Wang, Q.; Santhanam, B.; Dunkel, R.; Doerry, A.W.; Atwood, T.; Hayat, M.M. Remote Vibration Estimation Using Displaced-Phase-Center Antenna SAR for Strong Clutter Environments. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2735–2747. [Google Scholar] [CrossRef]
- Xu, J.; Xia, X.-G.; Peng, S.-B.; Yu, J.; Peng, Y.-N.; Qian, L.-C. Radar Maneuvering Target Motion Estimation Based on Generalized Radon-Fourier Transform. IEEE Trans. Signal Process. 2012, 60, 6190–6201. [Google Scholar] [CrossRef]
- Tian, J.; Cui, W.; Wu, S. A Novel Method for Parameter Estimation of Space Moving Targets. IEEE Geosci. Remote. Sens. Lett. 2014, 11, 389–393. [Google Scholar] [CrossRef]
- Kong, L.; Li, X.; Cui, G.; Yi, W.; Yang, Y. Coherent Integration Algorithm For A Maneuvering Target With High-Order Range Migration. IEEE Trans. Signal Process. 2015, 63, 1. [Google Scholar] [CrossRef]
- Doerry, A.W. Ship Dynamics for Maritime ISAR Imaging; Sandia National Laboratories: Livermore, CA, USA, 2008. [Google Scholar]
- Bäckström, V.; Skarbratt, A. Maritime ISAR Imaging with Airborne Radar. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2010. [Google Scholar]
- Perry, R.; di Pietro, R.; Fante, R. SAR imaging of moving targets. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 188–200. [Google Scholar] [CrossRef]
- Droitcour, A.; Boric-Lubecke, O.; Lubecke, V.; Lin, J.; Kovacs, G. Range Correlation and I/QI/Q Performance Benefits in Single-Chip Silicon Doppler Radars for Noncontact Cardiopulmonary Monitoring. IEEE Trans. Microw. Theory Tech. 2004, 52, 838–848. [Google Scholar] [CrossRef]
- Yan, Y.; Cattafesta, L.; Li, C.; Lin, J. Analysis of Detection Methods of RF Vibrometer for Complex Motion Measurement. IEEE Trans. Microw. Theory Tech. 2011, 59, 3556–3566. [Google Scholar] [CrossRef]
- Wang, R.; Hu, C.; Fu, X.; Long, T.; Zeng, T. Micro-Doppler measurement of insect wing-beat frequencies with W-band coherent radar. Sci. Rep. 2017, 7, 1396. [Google Scholar] [CrossRef]
- Gao, G.; Ouyang, K.; Luo, Y.; Liang, S.; Zhou, S. Scheme of Parameter Estimation for Generalized Gamma Distribution and Its Application to Ship Detection in SAR Images. IEEE Trans. Geosci. Remote Sens. 2016, 55, 1–21. [Google Scholar] [CrossRef]













| Specifications | Value | Specifications | Value |
|---|---|---|---|
| Argument of the perigee | 270° | Pulse bandwidth, , | 18 |
| Longitude of the ascending node | 113° | Receiver bandwidth, , | 20 |
| Mean Anomaly | 0° | Pulse Repetition Frequency(PRF), , | 300 |
| Orbit height, | 36,000 | Coherent Processing Interval (CPI), , | 100 |
| Orbit inclination | 53° | Pulse width, , | 20 |
| Orbit eccentricity | 0° | The grazing angle, | 60° |
| Wavelength, , | 0.24 | The angle between the slant range and the -axis, | 110° |
| Specifications | Value | ||
|---|---|---|---|
| Roll | Pitch | Yaw | |
| The amplitudes of 3D rotation, , rad | 0.0873 (5°) | 0.0698 (4°) | 0.0698 (4°) |
| The frequencies of 3D rotation, , Hz | 1/20 | 1/14 | 1/36 |
| The initial phases of 3D rotation, , rad | 0.5236 (30°) | 0.8727 (50°) | 0 (0°) |
| Specifications | Value | ||
|---|---|---|---|
| 1st | 2nd | 3rd | |
| The frequencies, , Hz | 0.100 | 0.056 | 0.144 |
| The amplitudes, , rad | 0.094 | 0.070 | 0.011 |
| The initial phases, , rad | 2.618 | 1.571 | 0.005 |
| Specifications | Value | ||
|---|---|---|---|
| Coordinate system , m | |||
| Scatter point A | 50 | 120 | 5 |
| Scatter point B | –100 | 100 | 0 |
| Scatter point C | 30 | –90 | 8 |
| Scatter point D | –120 | –110 | 9 |
| Scatter point E | 0 | 0 | 0 |
| Specifications | Value | ||
|---|---|---|---|
| 1st | 2nd | 3rd | |
| The frequencies, , Hz | 0.100 | 0.056 | 0.144 |
| The initial phases, , rad | 2.618 | 1.571 | 0.005 |
| The amplitudes of scatter point A, , rad | 0.104 | 0.066 | 0.011 |
| The amplitudes of scatter point B, , rad | 0.094 | 0.070 | 0.011 |
| The amplitudes of scatter point C, , rad | 0.097 | 0.057 | 0.012 |
| The amplitudes of scatter point D, , rad | 0.118 | 0.053 | 0.003 |
| The amplitudes of scatter point E, , rad | 0.001 | 0.000 | 0.001 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, W.; Zhang, Y.; Dong, X.; Cui, C.; Liu, Z.; Xiong, M. A Novel Ship Imaging Method with Multiple Sinusoidal Functions to Match Rotation Effects in Geosynchronous SAR. Remote Sens. 2020, 12, 2249. https://doi.org/10.3390/rs12142249
Xiong W, Zhang Y, Dong X, Cui C, Liu Z, Xiong M. A Novel Ship Imaging Method with Multiple Sinusoidal Functions to Match Rotation Effects in Geosynchronous SAR. Remote Sensing. 2020; 12(14):2249. https://doi.org/10.3390/rs12142249
Chicago/Turabian StyleXiong, Wei, Ying Zhang, Xichao Dong, Chang Cui, Zheng Liu, and Minghui Xiong. 2020. "A Novel Ship Imaging Method with Multiple Sinusoidal Functions to Match Rotation Effects in Geosynchronous SAR" Remote Sensing 12, no. 14: 2249. https://doi.org/10.3390/rs12142249
APA StyleXiong, W., Zhang, Y., Dong, X., Cui, C., Liu, Z., & Xiong, M. (2020). A Novel Ship Imaging Method with Multiple Sinusoidal Functions to Match Rotation Effects in Geosynchronous SAR. Remote Sensing, 12(14), 2249. https://doi.org/10.3390/rs12142249