Regional Tropical Aboveground Biomass Mapping with L-Band Repeat-Pass Interferometric Radar, Sparse Lidar, and Multiscale Superpixels

 , ,
, ,  , ,
, , 
Abstract
1. Introduction
2. Materials
2.1. Canopy Cover Map
2.2. AGB Reference Map
2.3. SAR Products
2.3.1. Backscatter
2.3.2. Coherence
3. Methodology for AGB Mapping
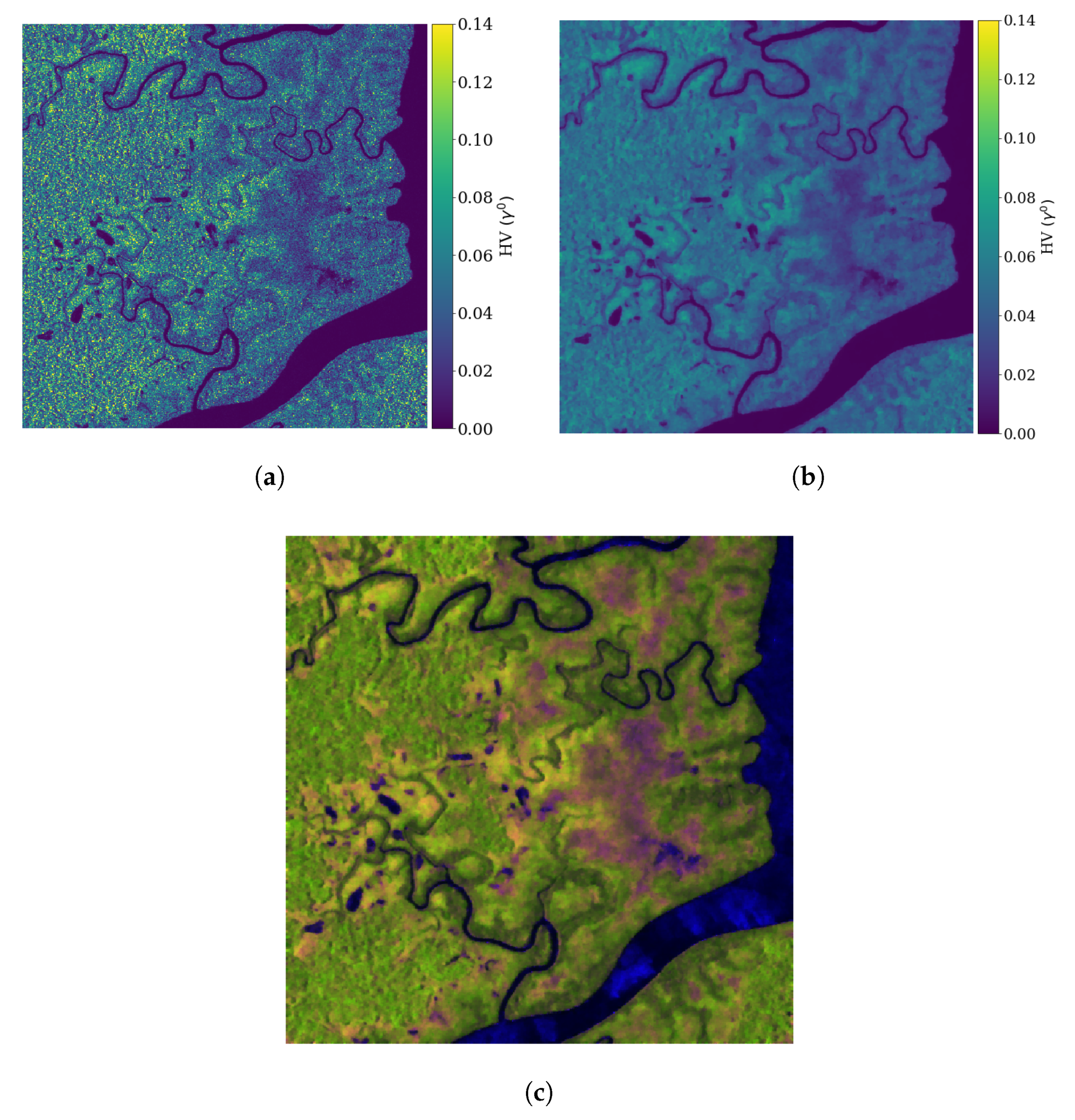
3.1. Generating Features from Multiscale Superpixels
3.2. Training and Validation: Simulating Regional Calibration with GEDI
4. Results and Discussion
4.1. Results with a Low Biomass Mask
4.2. Training on the Entire AGB Range
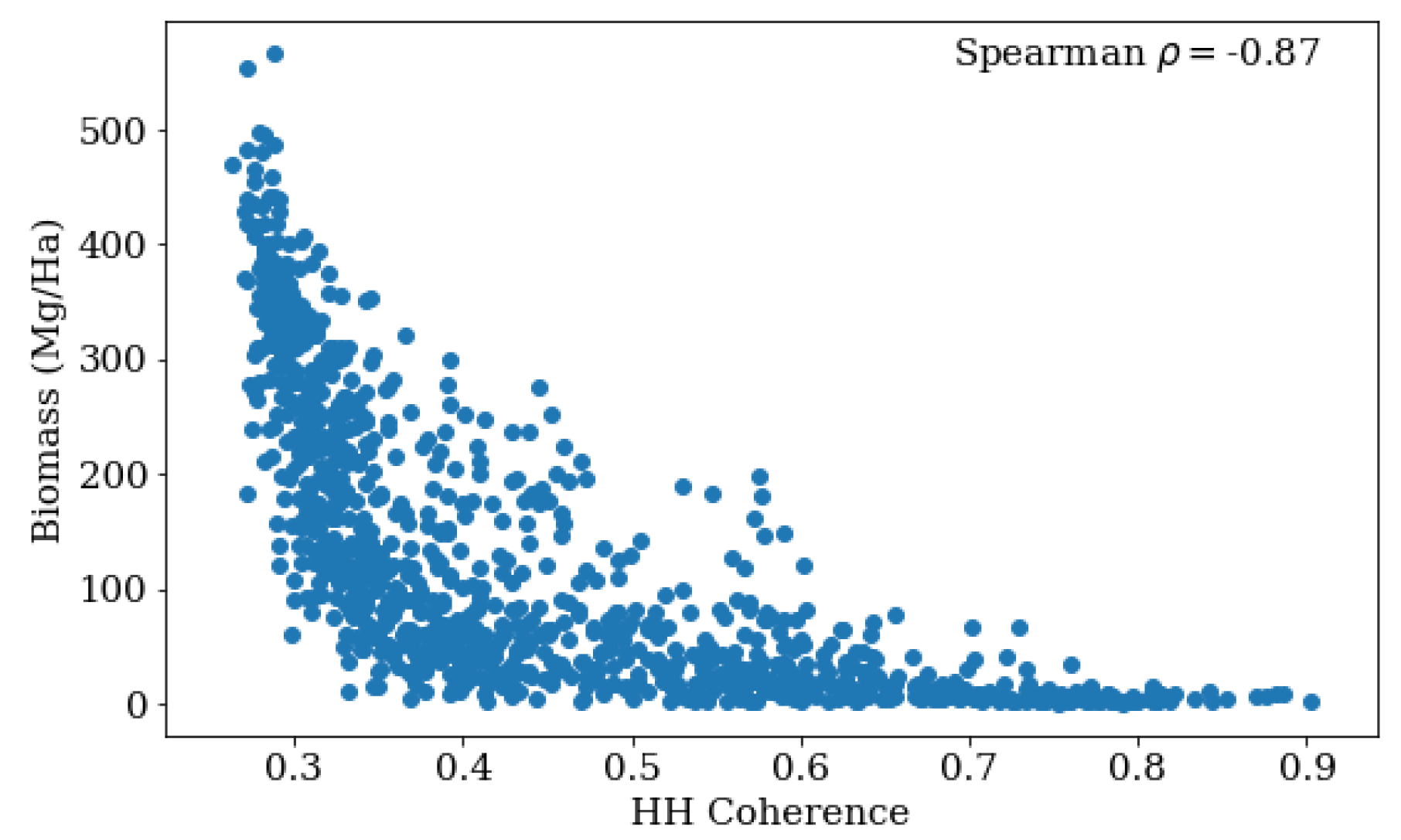
4.2.1. Coherence and AGB
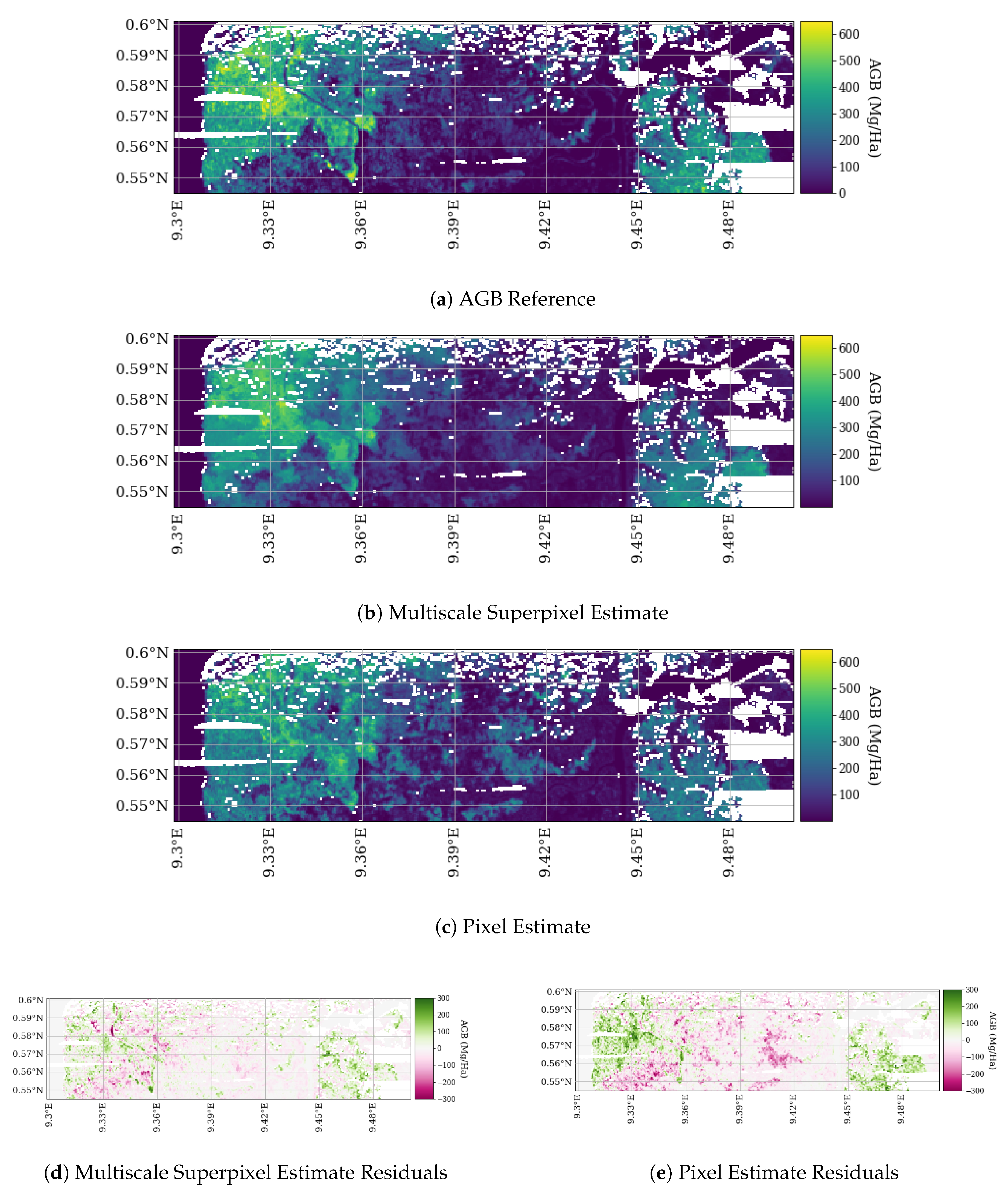
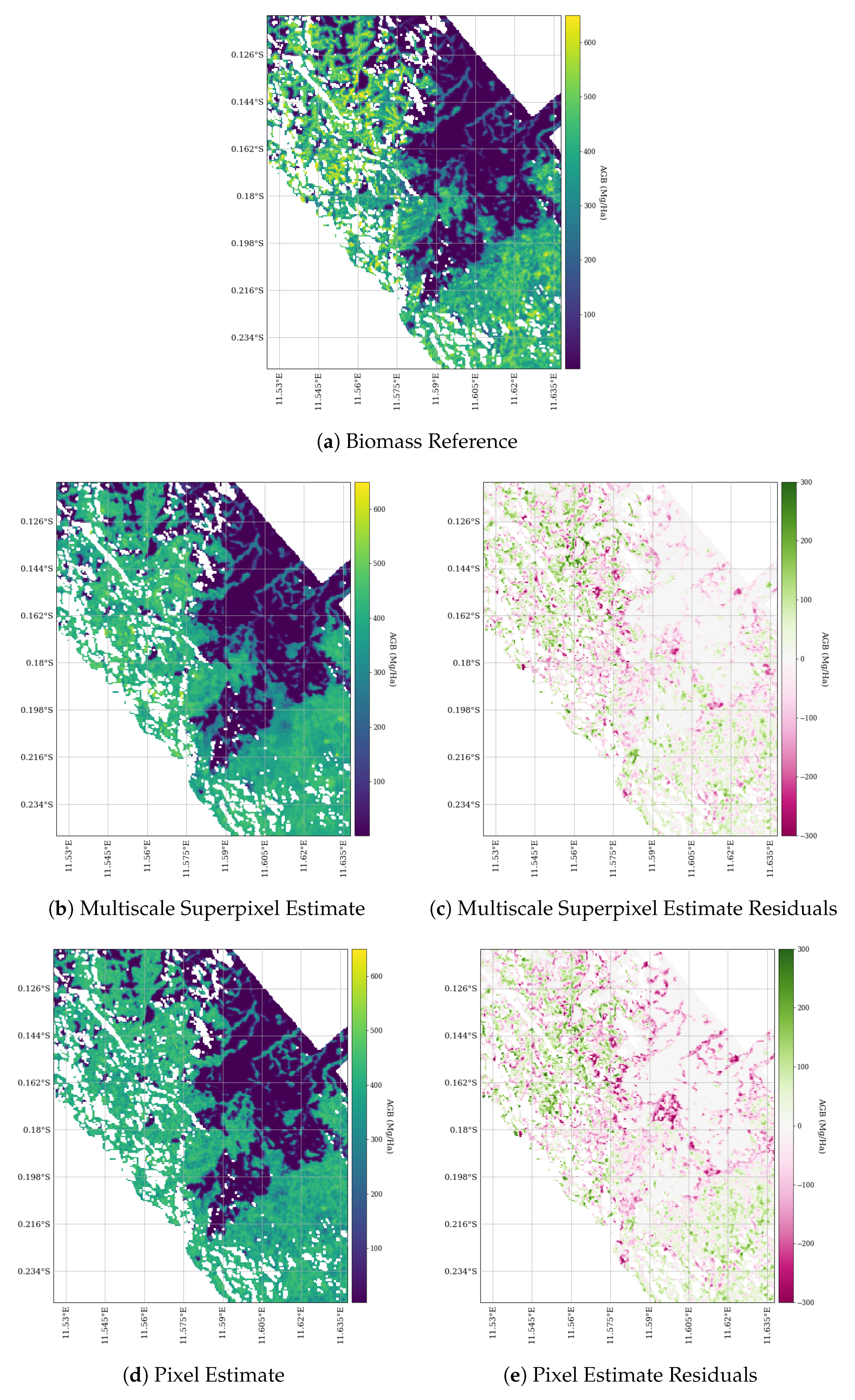
4.2.2. Multiscale Superpixels
4.3. Inspecting Model Importances
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AGB | Above Ground Biomass |
| ALOS-2 | Advanced Land Observing Satellite-2 |
| GEDI | Global Ecological Dynamics Investigation |
| GLAS | Geoscience Laser Altimeter System |
| ICESat-1/-2 | Ice, Cloud, and land Elevation Satellite-1/-2 |
| NISAR | NASA-ISRO Synthetic Aperture Radar |
| PALSAR-2 | Phased Array type L-band Synthetic Aperture Radar 2 |
| RMSE | Root Mean Squared Error |
| RTC | Radiometric Terrain Correction |
| SAR | Synthetic Aperture Radar |
| TV Denoising | Total Variation Denoising |
| UAVSAR | Uninhabited Aerial Vehicle Synthetic Aperture Radar |
References
- Eggleston, S.; Buendia, L.; Miwa, K.; Ngara, T.; Tanabe, K. 2006 IPCC Guidelines for National Greenhouse Gas Inventories; Institute for Global Environmental Strategies: Hayama, Japan, 2006; Volume 5. [Google Scholar]
- Kumar, L.; Mutanga, O. Remote Sensing of Above-Ground Biomass. Remote Sens. 2017, 9, 935. [Google Scholar] [CrossRef]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K.; Plummer, S.; Rocca, F.; Saatchi, S.; Shugart, H.; et al. The Biomass Mission: Mapping Global Forest Biomass to Better Understand the Terrestrial Carbon Cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Zolkos, S.; Goetz, S.; Dubayah, R. A Meta-Analysis of Terrestrial Aboveground Biomass Estimation using Lidar Remote Sensing. Remote Sens. Environ. 2013, 128, 289–298. [Google Scholar] [CrossRef]
- Sun, G.; Ranson, K.J.; Guo, Z.; Zhang, Z.; Montesano, P.; Kimes, D. Forest Biomass Mapping from Lidar and Radar Synergies. Remote Sens. Environ. 2011, 115, 2906–2916. [Google Scholar] [CrossRef]
- NISAR Science Team. NASA-ISRO SAR Mission Science Users Handbook. 2019. Available online: https://nisar.jpl.nasa.gov/files/nisar/NISAR_Science_Users_Handbook.pdf. (accessed on 1 January 2020).
- Sinha, S.; Jeganathan, C.; Sharma, L.K.; Nathawat, M.S. A Review of Radar Remote Sensing for Biomass Estimation. Int. J. Environ. Sci. Technol. 2015, 12, 1779–1792. [Google Scholar] [CrossRef]
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Bouvet, A.; Mermoz, S.; Le Toan, T.; Villard, L.; Mathieu, R.; Naidoo, L.; Asner, G.P. An Above-Ground Biomass Map of African Savannahs and Woodlands at 25 m Resolution Derived from ALOS PALSAR. Remote Sens. Environ. 2018, 206, 156–173. [Google Scholar] [CrossRef]
- Treuhaft, R.N.; Moghaddam, M.; Van Zyl, J.J. Vegetation Characteristics and Underlying Topography from Interferometric Radar. Radio Sci. 1996, 31, 1449–1485. [Google Scholar] [CrossRef]
- Denbina, M.; Simard, M. Kapok: An Open Source Python Library for PolInSAR Forest Height Estimation using UAVSAR Data. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4314–4317. [Google Scholar]
- Lavalle, M.; Simard, M.; Hensley, S. A Temporal Decorrelation Model for Polarimetric Radar Interferometers. IEEE Trans. Geosci. Remote Sens. 2011, 50, 2880–2888. [Google Scholar] [CrossRef]
- Lavalle, M.; Hensley, S. Extraction of Structural and Dynamic Properties of Forests from Polarimetric-Interferometric SAR Data Affected by Temporal Decorrelation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4752–4767. [Google Scholar] [CrossRef]
- El Hajj, M.; Baghdadi, N.; Labriére, N.; Bailly, J.S.; Villard, L. Mapping of Aboveground Biomass in Gabon. Comptes Rendus Geosci. 2019, 351, 321–331. [Google Scholar] [CrossRef]
- Pinto, N.; Simard, M.; Dubayah, R. Using InSAR Coherence to Map Stand Age in a Boreal Forest. Remote Sens. 2013, 5, 42–56. [Google Scholar] [CrossRef]
- Simard, M.; Hensley, S.; Lavalle, M.; Dubayah, R.; Pinto, N.; Hofton, M. An Empirical Assessment of Temporal Decorrelation using the Uninhabited Aerial Vehicle Synthetic Aperture Radar over Forested Landscapes. Remote Sens. 2012, 4, 975–986. [Google Scholar] [CrossRef]
- Lei, Y.; Siqueira, P.; Torbick, N.; Ducey, M.; Chowdhury, D.; Salas, W. Generation of Large-Scale Moderate-Resolution Forest Height Mosaic With Spaceborne Repeat-Pass SAR Interferometry and Lidar. IEEE Trans. Geosci. Remote Sens. 2018, 57, 770–787. [Google Scholar] [CrossRef]
- Simard, M.; Denbina, M. An Assessment of Temporal Decorrelation Compensation Methods for Forest Canopy Height Estimation using Airborne L-band Same-day Repeat-Pass Polarimetric SAR Interferometry. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 11, 95–111. [Google Scholar] [CrossRef]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping Forest Canopy Height Globally with Spaceborne Lidar. J. Geophys. Res. Biogeosci. 2011, 116. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.J.; Keller, M.; Cohen, W.B.; Carabajal, C.C.; Del Bom Espirito-Santo, F.; Hunter, M.O.; De Oliveira, R., Jr. Estimates of forest canopy height and aboveground biomass using ICESat. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Saatchi, S.S.; Houghton, R.A.; Dos Santos Alvala, R.C.; Soares, J.V.; Yu, Y. Distribution of Aboveground Live Biomass in the Amazon Basin. Glob. Chang. Biol. 2007, 13, 816–837. [Google Scholar] [CrossRef]
- Baccini, A.; Laporte, N.; Goetz, S.J.; Sun, M.; Dong, H. A First Map of Tropical Africa’s Above-Ground Biomass Derived from Satellite Imagery. Environ. Res. Lett. 2008, 3, 045011. [Google Scholar] [CrossRef]
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-Resolution Laser Ranging of the Earth’s Forests and Topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Dubayah, R.; Goetz, S.; Blair, J.; Fatoyinbo, T.E.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation. AGUFM 2014, 2014, U14A-07. [Google Scholar]
- Saarela, S.; Holm, S.; Healey, S.; Andersen, H.E.; Petersson, H.; Prentius, W.; Patterson, P.; Næsset, E.; Gregoire, T.; Ståhl, G. Generalized Hierarchical Model-Based Estimation for Aboveground Biomass Assessment Using GEDI and Landsat Data. Remote Sens. 2018, 10, 1832. [Google Scholar] [CrossRef]
- Wang, M.; Sun, R.; Xiao, Z. Estimation of Forest Canopy Height and Aboveground Biomass from Spaceborne LiDAR and Landsat Imageries in Maryland. Remote Sens. 2018, 10, 344. [Google Scholar] [CrossRef]
- Qi, W.; Dubayah, R. Combining Tandem-X InSAR and Simulated GEDI Lidar Observations for Forest Structure Mapping. Remote Sens. Environ. 2016, 187, 253–266. [Google Scholar] [CrossRef]
- Qi, W.; Lee, S.K.; Hancock, S.; Luthcke, S.; Tang, H.; Armston, J.; Dubayah, R. Improved Forest Height Estimation by Fusion of Simulated GEDI Lidar Data and TanDEM-X InSAR Data. Remote Sens. Environ. 2019, 221, 621–634. [Google Scholar] [CrossRef]
- Askne, J.; Fransson, J.; Santoro, M.; Soja, M.; Ulander, L. Model-based Biomass Estimation of a Hemi-boreal Forest from Multitemporal TanDEM-X Acquisitions. Remote Sens. 2013, 5, 5574–5597. [Google Scholar] [CrossRef]
- Silva, C.; Duncanson, L.; Hancock, S.; Neuenschwander, A.; Thomas, N.; Hofton, M.; Fatoyinbo, T.; Simard, M.; Marshak, C.; Armston, J.; et al. Fusing GEDI, ICESat-2 and NISAR data for Aboveground Biomass Mapping in Sonoma County, California, USA. AGUFM 2018, 2018, B44E-05. [Google Scholar]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef]
- MacDicken, K. Forest Resources Assessment Working Paper; FAO: Rome, Italy, 2015. [Google Scholar]
- Sasaki, N.; Putz, F.E. Critical Need for New Definitions of “Forest” and “Forest Degradation” in Global Climate Change Agreements. Conserv. Lett. 2009, 2, 226–232. [Google Scholar] [CrossRef]
- Margono, B.A.; Potapov, P.V.; Turubanova, S.; Stolle, F.; Hansen, M.C. Primary Forest Cover Loss in Indonesia over 2000–2012. Nat. Clim. Chang. 2014, 4, 730. [Google Scholar] [CrossRef]
- Armston, J.; Tang, H.; Hancock, S.; Marselis, S.; Duncanson, L.; Hofton, M.; Blair, J.B.; Fatoyinbo, L.; Dubayah, R. AfriSAR: Gridded Aboveground Biomass, Canopy Height and Vertical Profile Metrics from LVIS, Gabon. 2016. Available online: https://doi.org/10.3334/ORNLDAAC/1775 (accessed on 1 January 2020).
- Fatoyinbo, L.; Armston, J.; Simard, M.; Saatchi, S.; Lou, Y.; Dubayah, R.; Hensley, S.; Armston, J.; Duncanson, L.; Lavalle, M. The 2016 NASA AfriSAR Campaign: Airborne SAR and Lidar Measurements of Tropical Forest Structure and Biomass in Support of Future Space Missions. Remote. Sens. Environ. 2017. [CrossRef]
- Duncanson, L.; Neuenschwander, A.; Hancock, S.; Thomas, N.; Fatoyinbo, T.; Simard, M.; Luthcke, S.; Silva, C.; Armston, J.; Hofton, M.; et al. Understanding Biomass Errors from Simulated GEDI, ICESat-2 and NISAR Data Across Environmental Gradients in Sonoma County, California. Remote. Sens. Environ. submitted.
- Simard, M.; Riel, B.V.; Denbina, M.; Hensley, S. Radiometric Correction of Airborne Radar Images over Forested Terrain with Topography. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4488–4500. [Google Scholar] [CrossRef]
- Rosen, P.; Hensley, S.; Shaffer, S.; Edelstein, W.; Kim, Y.; Kumar, R.; Misra, T.; Bhan, R.; Satish, R.; Sagi, R. An Update on the NASA-ISRO Dual-frequency DBF SAR (NISAR) Mission. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 2106–2108. [Google Scholar]
- UAVSAR Team. UAVSAR Data Search. 2020. Available online: https://uavsar.jpl.nasa.gov/cgi-bin/data.pl (accessed on 1 February 2020).
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Gamma SAR and Interferometric Processing Software. In Proceedings of the ERS-ENVISAT Symposium, Gothenburg, Sweden, 16–20 October 2000; Volume 1620, p. 1620. [Google Scholar]
- Rudin, L.I.; Osher, S.; Fatemi, E. Nonlinear Total Variation Based Noise Removal Algorithms. Phys. D Nonlinear Phenom. 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Deledalle, C.A.; Denis, L.; Tabti, S.; Tupin, F. MuLoG, or How to Apply Gaussian Denoisers to Multi-Channel SAR Speckle Reduction? IEEE Trans. Image Process. 2017, 26, 4389–4403. [Google Scholar] [CrossRef]
- Getreuer, P. Rudin-Osher-Fatemi Total Variation Denoising using Split-Bregman. Image Process. OnLine 2012, 2, 74–95. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, J.M. Ideal spatial Adaptation by Wavelet Shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Chambolle, A. An Algorithm for Total Variation Minimization and Applications. J. Math. Imaging Vis. 2004, 20, 89–97. [Google Scholar]
- CEOS. A Layman’s Interpretation Guide to L-band and C-band Synthetic Aperture Radar Data. 2018. Available online: http://ceos.org/document_management/SEO/DataCube/Laymans_SAR_Interpretation_Guide_2.0.pdf (accessed on 1 June 2020).
- Freeman, A.; Durden, S.L. A Three-Component Scattering Model for Polarimetric SAR Data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic Aperture Radar Interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Tsuchiya, M.; Fujisawa, T.; Miura, S. ALOS Mission Operation 2008 in JAXA. In Proceedings of the SpaceOps 2008 Conference, Heidelberg, Germany, 12–16 May 2008; p. 3317. [Google Scholar]
- Rosen, P.; Gurrola, E.; Agram, P.S.; Sacco, G.F.; Lavalle, M. The InSAR Scientific Computing Environment (ISCE): A Python Framework for Earth Science. In AGU Fall Meeting Abstracts; AGU: Washington, DC, USA, 2015. [Google Scholar]
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Denbina, M.; Simard, M.; Hawkins, B. Forest Height Estimation Using Multibaseline PolInSAR and Sparse Lidar Data Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3415–3433. [Google Scholar] [CrossRef]
- Meinel, G.; Neubert, M. A Comparison of Segmentation Programs for High Resolution Remote Sensing Data. Int. Arch. Photogramm. Remote Sens. 2004, 35, 1097–1105. [Google Scholar]
- Clewley, D.; Bunting, P.; Shepherd, J.; Gillingham, S.; Flood, N.; Dymond, J.; Lucas, R.; Armston, J.; Moghaddam, M. A Python-based Open Source System for Geographic Object-based Image Analysis (GEOBIA) Utilizing Raster Attribute Tables. Remote Sens. 2014, 6, 6111–6135. [Google Scholar] [CrossRef]
- Ren, X.; Malik, J. Learning a Classification Model for Segmentation. In Proceedings of the Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 10–17. [Google Scholar]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Zhou, L.; Cao, G.; Li, Y.; Shang, Y. Change Detection Based on Conditional Random Field With Region Connection Constraints in High-Resolution Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 3478–3488. [Google Scholar] [CrossRef]
- Thompson, D.R.; Mandrake, L.; Gilmore, M.S.; Castano, R. Superpixel Endmember Detection. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4023–4033. [Google Scholar] [CrossRef]
- Marshak, C.; Simard, M.; Denbina, M. Monitoring Forest Loss in ALOS/PALSAR Time-Series with Superpixels. Remote Sens. 2019, 11, 556. [Google Scholar] [CrossRef]
- Huang, X.; Yang, W.; Xia, G.; Liao, M. Superpixel-based Change Detection in High Resolution SAR Images using region Covariance Features. In Proceedings of the 8th International Workshop on the Analysis of Multitemporal Remote Sensing Images, Annecy, France, 22–24 July 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Huttenlocher, D.P. Efficient Graph-based Image Segmentation. Int. J. Comput. Vis. 2004, 59, 167–181. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef]
- Bonev, B.; Yuille, A.L. Bottom-Up Processing in Complex Scenes: A Unifying Perspective on Segmentation, Fixation Saliency, Candidate Regions, Base-Detail Decomposition, and Image Enhancement. In Recent Progress in Brain and Cognitive Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 109–130. [Google Scholar]
- Adelson, E.H.; Anderson, C.H.; Bergen, J.R.; Burt, P.J.; Ogden, J.M. Pyramid Methods in Image Processing. RCA Eng. 1984, 29, 33–41. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 4–8 September 2018; pp. 801–818. [Google Scholar]
- Saatchi, S.; McDonald, K.C. Coherent Effects in Microwave Backscattering Models for Forest Canopies. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1032–1044. [Google Scholar] [CrossRef]
- Huang, W.; Swatantran, A.; Duncanson, L.; Johnson, K.; Watkinson, D.; Dolan, K.; O’Neil-Dunne, J.; Hurtt, G.; Dubayah, R. County-Scale Biomass Map Comparison: A Case Study for Sonoma, California. Carbon Manag. 2017, 8, 417–434. [Google Scholar] [CrossRef]
- Neumann, M.; Saatchi, S.S.; Ulander, L.M.H.; Fransson, J.E.S. Assessing Performance of L-and P-band Polarimetric Interferometric SAR Data in Estimating Boreal Forest Above-Ground Biomass. IEEE Trans. Geosci. Remote Sens. 2012, 50, 714–726. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Hancock, S.; Armston, J.; Hofton, M.; Sun, X.; Tang, H.; Duncanson, L.I.; Kellner, J.R.; Dubayah, R. The GEDI Simulator: A Large-Footprint Waveform Lidar Simulator for Calibration and Validation of Spaceborne Missions. Earth Space Sci. 2019, 6, 294–310. [Google Scholar] [CrossRef]
- Silva, C.A.; Saatchi, S.; Garcia, M.; Labriere, N.; Klauberg, C.; Ferraz, A.; Meyer, V.; Jeffery, K.J.; Abernethy, K.; White, L.; et al. Comparison of Small-and Large-footprint Lidar Characterization of Tropical Forest Aboveground Structure and Biomass: A Case Study from Central Gabon. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3512–3526. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Site | (Mg/ha) | (Mg/ha) | (%) | (Mg/ha) | (Mg/ha) | (Mg/ha) | (Mg/ha) | (%) |
|---|---|---|---|---|---|---|---|---|---|
| PALSAR-2 | Lope | 380.10 | 130.42 | 34.31 | 399.20 | 104.06 | 29.69 | 29.89 | 5.17 |
| Mondah | 137.06 | 146.97 | 107.23 | 271.63 | 115.59 | 24.77 | 27.51 | 54.51 | |
| Ogooue | 286.95 | 123.51 | 43.04 | 310.50 | 102.06 | 45.88 | 31.73 | 8.90 | |
| UAVSAR | Lope | 332.55 | 159.51 | 47.97 | 382.99 | 107.70 | 27.86 | 29.33 | 14.20 |
| Mondah | 125.03 | 142.58 | 114.04 | 271.55 | 110.16 | 23.20 | 27.13 | 59.00 | |
| Ogooue | 256.37 | 137.97 | 53.82 | 302.04 | 103.55 | 37.54 | 31.37 | 17.27 |
| Coherence First Date | Backscatter Image Date | Temporal Baseline | Area | SRTM Normal Angle | HV | Coherence | ||
|---|---|---|---|---|---|---|---|---|
| Sensor | Site | (ha) | () | () | () | |||
| PALSAR-2 | Lope | 2015-03-12 | 2015-03-12 | 14 days | 7,521 | 9.1 (6.0) | −12.4 (3.5) | 0.34 (0.14) |
| Mondah | 2015-04-14 | 2015-04-14 | 14 days | 2479 | 3.3 (3.2) | −13.8 (7.9) | 0.32 (0.18) | |
| Ogooue | 2015-06-04 | 2015-06-18 | 14 days | 5735 | 6.2 (5.2) | −12.8 (4.1) | 0.59 (0.11) | |
| UAVSAR | Lope | 2016-02-25 | 2016-03-08 | 2 h | 2150 | 7.5 (5.5) | −13.6 (5.8) | 0.86 (0.1) |
| Mondah | 2016-03-06 | 2016-03-02 | 2 h | 1170 | 3.2 (3.2) | −15.3 (10.4) | 0.73 (0.35) | |
| Ogooue | 2016-02-27 | 2016-02-27 | 8 days | 5627 | 5.5 (4.5) | −13.6 (9.5) | 0.4 (0.13) |
| Full AGB Range | >100 Mg/ha | ≤100 Mg/ha | |||||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE | nRMSE | Bias | RMSE | nRMSE | Bias | RMSE | nRMSE | Bias | |
| Site | (Mg/ha) | (%) | (Mg/ha) | (Mg/ha) | (%) | (Mg/ha) | (Mg/ha) | (%) | (Mg/ha) |
| PALSAR-2 | |||||||||
| Lope | 89.23 | 25.24 | −0.53 | 94.84 | 23.77 | −0.69 | 16.40 | 110.84 | 0.69 |
| Mondah | 51.23 | 50.44 | −0.17 | 85.45 | 31.52 | −1.82 | 16.03 | 101.71 | 0.66 |
| Ogooue | 86.65 | 30.81 | 2.18 | 91.23 | 29.41 | 2.46 | 26.07 | 67.06 | −0.13 |
| UAVSAR | |||||||||
| Lope | 72.43 | 25.41 | −0.63 | 84.91 | 21.79 | −0.94 | 11.90 | 90.96 | 0.18 |
| Mondah | 47.69 | 51.00 | 0.62 | 83.03 | 30.33 | 0.81 | 15.78 | 108.91 | 0.53 |
| Ogooue | 78.84 | 32.69 | −0.04 | 88.54 | 29.33 | −0.33 | 22.87 | 80.11 | 0.96 |
| Full AGB Range | >100 Mg/ha | ≤100 Mg/ha | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | nRMSE | Bias | RMSE | nRMSE | Bias | RMSE | nRMSE | Bias | ||
| Site | Coherence | (Mg/ha) | (%) | (Mg/ha) | (Mg/ha) | (%) | (Mg/ha) | (Mg/ha) | (%) | (Mg/ha) |
| PALSAR-2 | ||||||||||
| Lope | w/o | 99.98 | 26.30 | −1.01 | 98.28 | 24.61 | −5.12 | 127.14 | 428.26 | 74.16 |
| w/ | 96.49 | 25.38 | −1.35 | 95.24 | 23.85 | −4.97 | 117.13 | 394.56 | 65.04 | |
| Mondah | w/o | 84.66 | 61.70 | −2.93 | 108.79 | 40.05 | −45.95 | 57.11 | 231.06 | 33.05 |
| w/ | 72.82 | 53.08 | −2.08 | 95.19 | 35.04 | −30.84 | 46.48 | 188.05 | 21.97 | |
| Ogooue | w/o | 99.44 | 34.66 | 2.97 | 94.98 | 30.60 | −7.01 | 137.01 | 298.37 | 105.30 |
| w/ | 96.25 | 33.55 | 1.85 | 92.46 | 29.79 | −7.41 | 128.85 | 280.61 | 96.79 | |
| UAVSAR | ||||||||||
| Lope | w/o | 83.98 | 25.24 | 1.54 | 86.46 | 22.57 | −2.91 | 67.02 | 240.69 | 28.45 |
| w/ | 81.87 | 24.61 | 2.91 | 84.00 | 21.93 | −1.45 | 67.59 | 242.76 | 29.30 | |
| Mondah | w/o | 80.74 | 64.61 | 1.76 | 104.34 | 38.43 | −42.11 | 59.03 | 254.70 | 32.21 |
| w/ | 71.72 | 57.40 | 1.41 | 96.51 | 35.54 | −33.17 | 47.42 | 204.61 | 25.43 | |
| Ogooue | w/o | 97.36 | 37.94 | −2.49 | 95.22 | 31.52 | −18.76 | 107.06 | 284.75 | 75.86 |
| w/ | 92.00 | 35.85 | −1.84 | 91.16 | 30.17 | −16.21 | 95.93 | 255.14 | 67.30 | |
| Full AGB Range | ||||
|---|---|---|---|---|
| Site | # of Scales | RMSE (Mg/ha) | nRMSE (%) | Bias (Mg/ha) |
| PALSAR-2 | ||||
| Lope | 0 | 104.70 | 27.54 | −2.40 |
| 1 | 99.20 | 26.09 | −1.84 | |
| 2 | 97.02 | 25.52 | −1.38 | |
| 3 | 96.49 | 25.38 | −1.35 | |
| Mondah | 0 | 96.91 | 70.64 | −1.15 |
| 1 | 83.44 | 60.82 | −2.89 | |
| 2 | 74.68 | 54.43 | −1.75 | |
| 3 | 72.82 | 53.08 | −2.08 | |
| Ogooue | 0 | 116.78 | 40.70 | 0.82 |
| 1 | 106.57 | 37.15 | 1.84 | |
| 2 | 98.62 | 34.37 | 2.29 | |
| 3 | 96.25 | 33.55 | 1.85 | |
| UAVSAR | ||||
| Lope | 0 | 94.12 | 28.29 | 7.24 |
| 1 | 84.84 | 25.50 | 4.47 | |
| 2 | 82.28 | 24.73 | 3.89 | |
| 3 | 81.87 | 24.61 | 2.91 | |
| Mondah | 0 | 89.87 | 71.92 | 0.85 |
| 1 | 79.53 | 63.65 | 1.99 | |
| 2 | 73.82 | 59.08 | 1.43 | |
| 3 | 71.72 | 57.40 | 1.41 | |
| Ogooue | 0 | 118.99 | 46.37 | −4.53 |
| 1 | 103.91 | 40.49 | −1.86 | |
| 2 | 94.07 | 36.66 | −1.88 | |
| 3 | 92.00 | 35.85 | −1.84 | |
| Feature Names | Feature Importance | |||
|---|---|---|---|---|
| Sensor | Site | Rank | (%) | |
| PALSAR-2 | Lope | 1 | HV backscatter (scale 1) | 8.52 |
| 2 | HH coherence (pixel level) | 5.97 | ||
| 3 | HV backscatter (pixel level) | 4.72 | ||
| Mondah | 1 | HH coherence (scale 3) | 25.18 | |
| 2 | HH coherence (scale 1) | 6.19 | ||
| 3 | HV Coherence (scale 3) | 3.93 | ||
| Ogooue | 1 | Polarization ratio (scale 3) | 6.20 | |
| 2 | HH coherence (pixel level) | 4.97 | ||
| 3 | HV coherence (pixel level) | 4.96 | ||
| UAVSAR | Lope | 1 | Polarization ratio (pixel level) | 11.80 |
| 2 | Polarization ratio (scale 1) | 10.41 | ||
| 3 | Polarization ratio (scale 1) | 7.34 | ||
| Mondah | 1 | Polarization ratio (scale 1) | 15.17 | |
| 2 | HV coherence (scale 2) | 6.28 | ||
| 3 | Polarization ratio (scale 1) | 5.00 | ||
| Ogooue | 1 | HH coherence (pixel level) | 5.39 | |
| 2 | Polarization ratio (pixel level) | 5.24 | ||
| 3 | HV coherence (pixel level) | 4.93 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marshak, C.; Simard, M.; Duncanson, L.; Silva, C.A.; Denbina, M.; Liao, T.-H.; Fatoyinbo, L.; Moussavou, G.; Armston, J. Regional Tropical Aboveground Biomass Mapping with L-Band Repeat-Pass Interferometric Radar, Sparse Lidar, and Multiscale Superpixels. Remote Sens. 2020, 12, 2048. https://doi.org/10.3390/rs12122048
Marshak C, Simard M, Duncanson L, Silva CA, Denbina M, Liao T-H, Fatoyinbo L, Moussavou G, Armston J. Regional Tropical Aboveground Biomass Mapping with L-Band Repeat-Pass Interferometric Radar, Sparse Lidar, and Multiscale Superpixels. Remote Sensing. 2020; 12(12):2048. https://doi.org/10.3390/rs12122048
Chicago/Turabian StyleMarshak, Charlie, Marc Simard, Laura Duncanson, Carlos Alberto Silva, Michael Denbina, Tien-Hao Liao, Lola Fatoyinbo, Ghislain Moussavou, and John Armston. 2020. "Regional Tropical Aboveground Biomass Mapping with L-Band Repeat-Pass Interferometric Radar, Sparse Lidar, and Multiscale Superpixels" Remote Sensing 12, no. 12: 2048. https://doi.org/10.3390/rs12122048
APA StyleMarshak, C., Simard, M., Duncanson, L., Silva, C. A., Denbina, M., Liao, T.-H., Fatoyinbo, L., Moussavou, G., & Armston, J. (2020). Regional Tropical Aboveground Biomass Mapping with L-Band Repeat-Pass Interferometric Radar, Sparse Lidar, and Multiscale Superpixels. Remote Sensing, 12(12), 2048. https://doi.org/10.3390/rs12122048