Airborne Validation Experiment of 1.57-μm Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement

 , ,
, ,
Abstract
:
1. Introduction
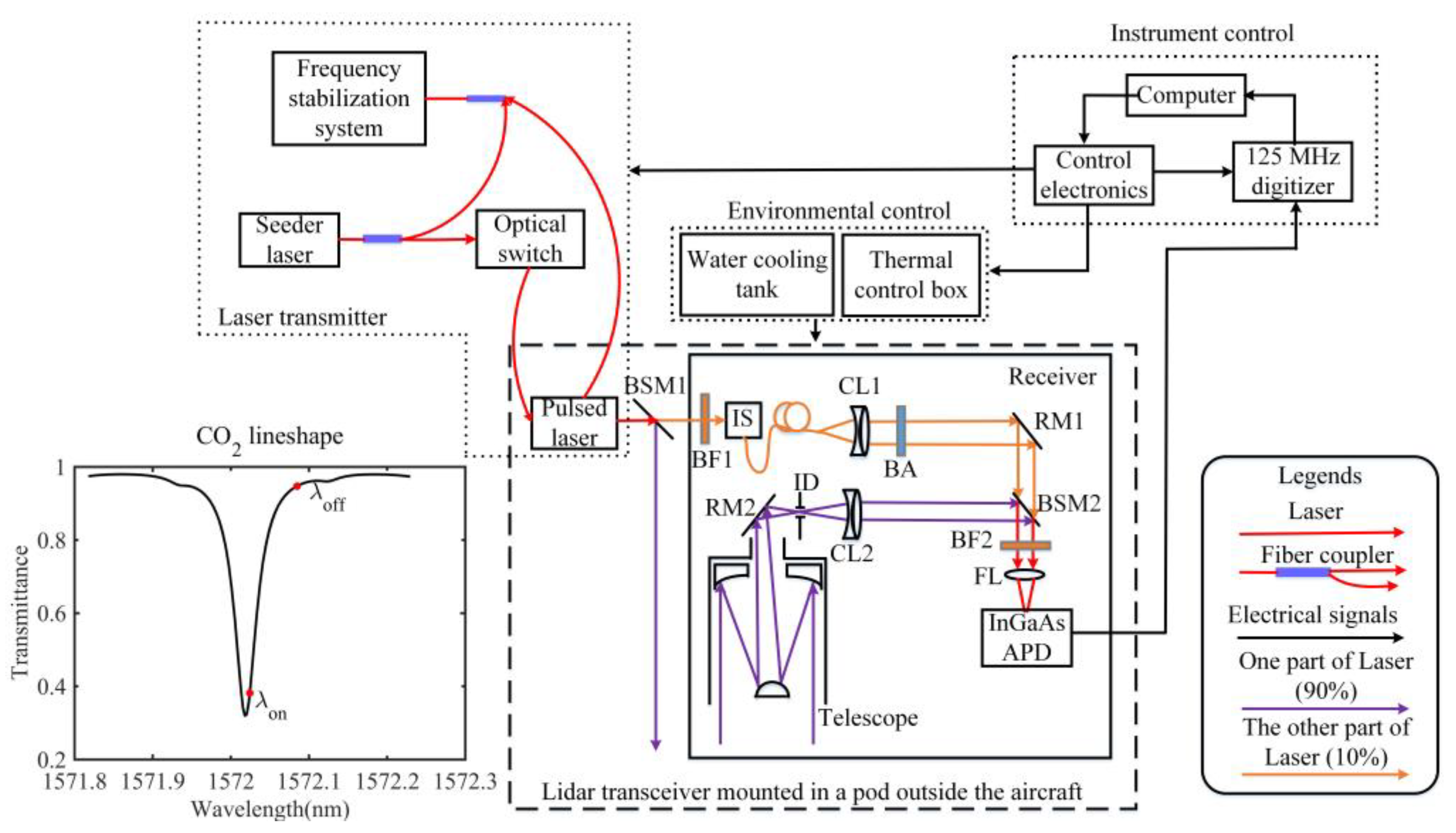
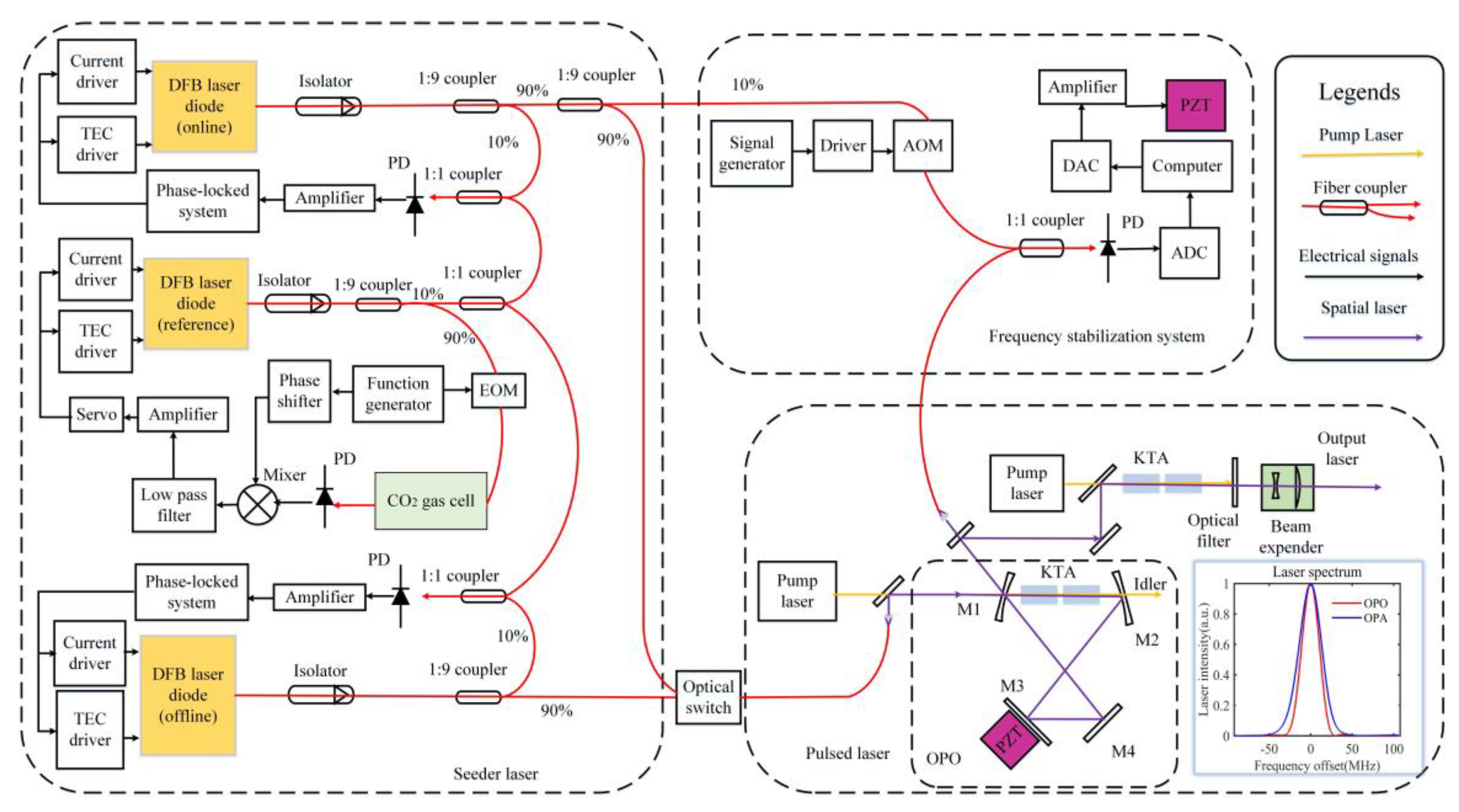
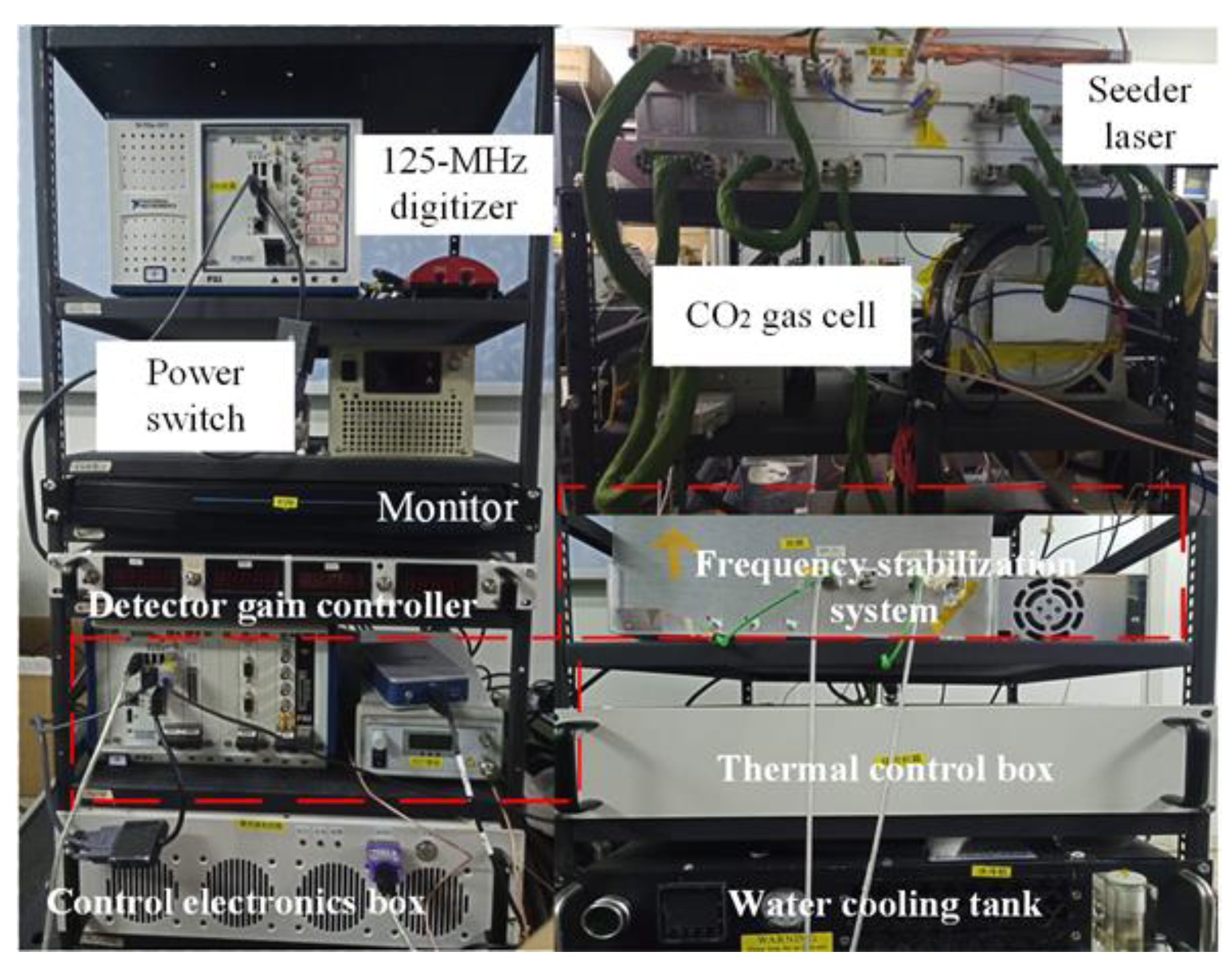
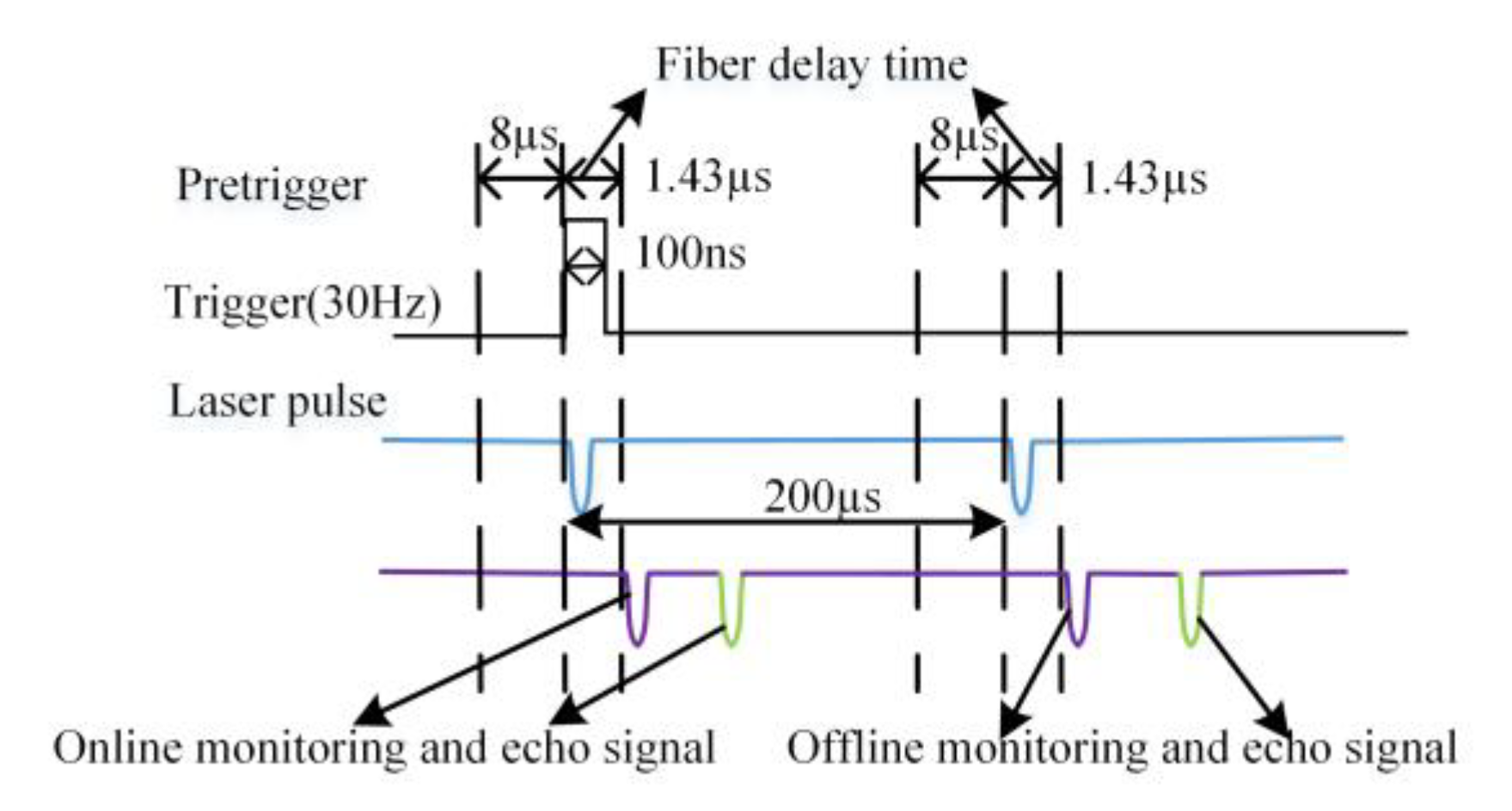
2. IPDA LIDAR Instrument and Principle
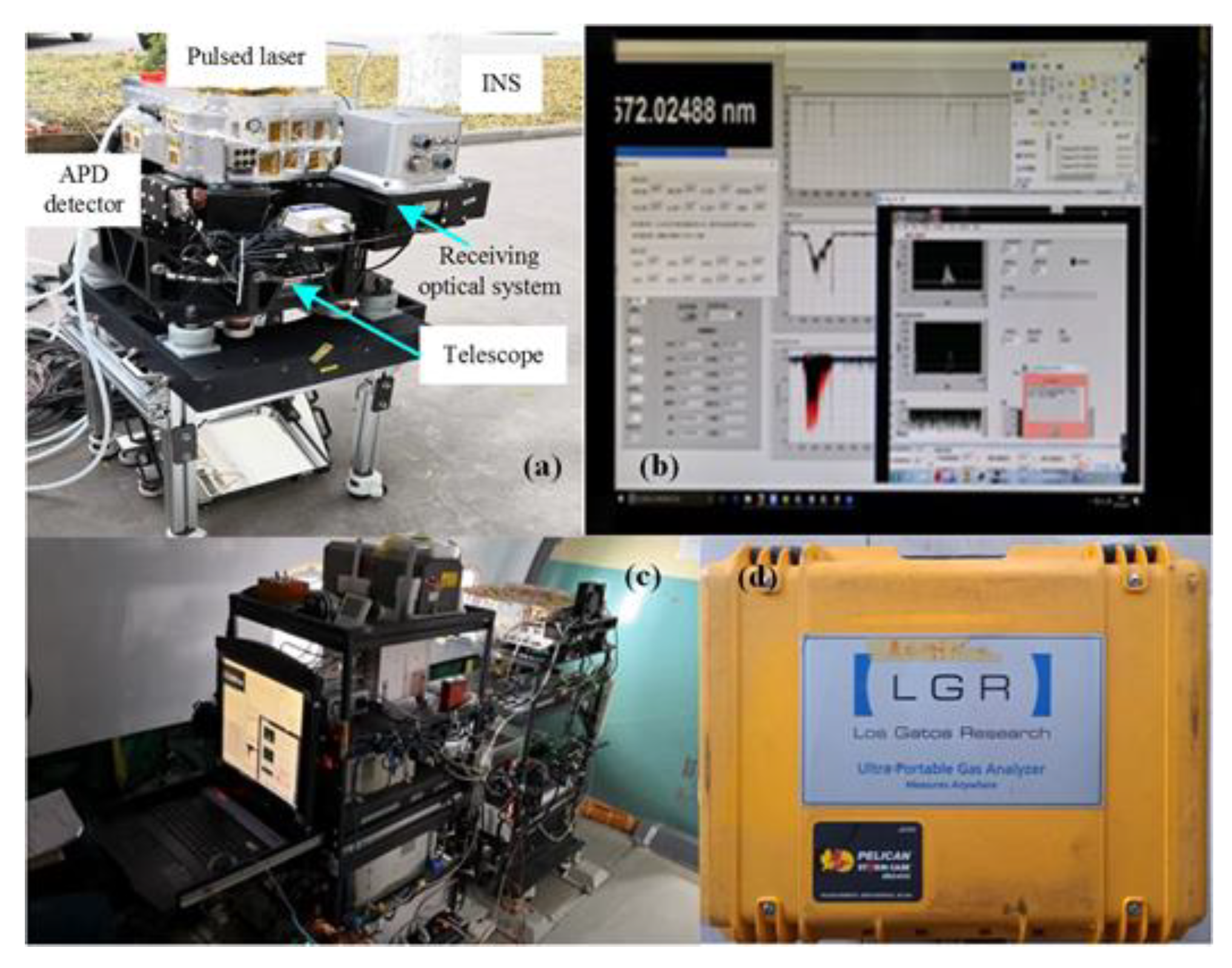
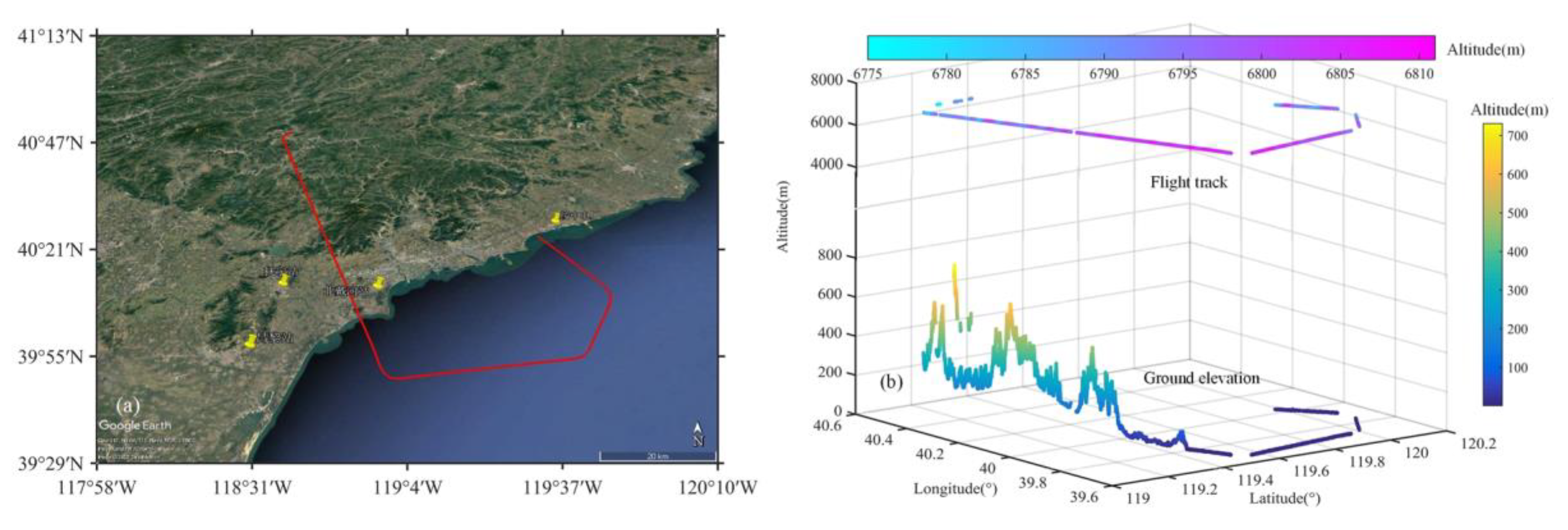
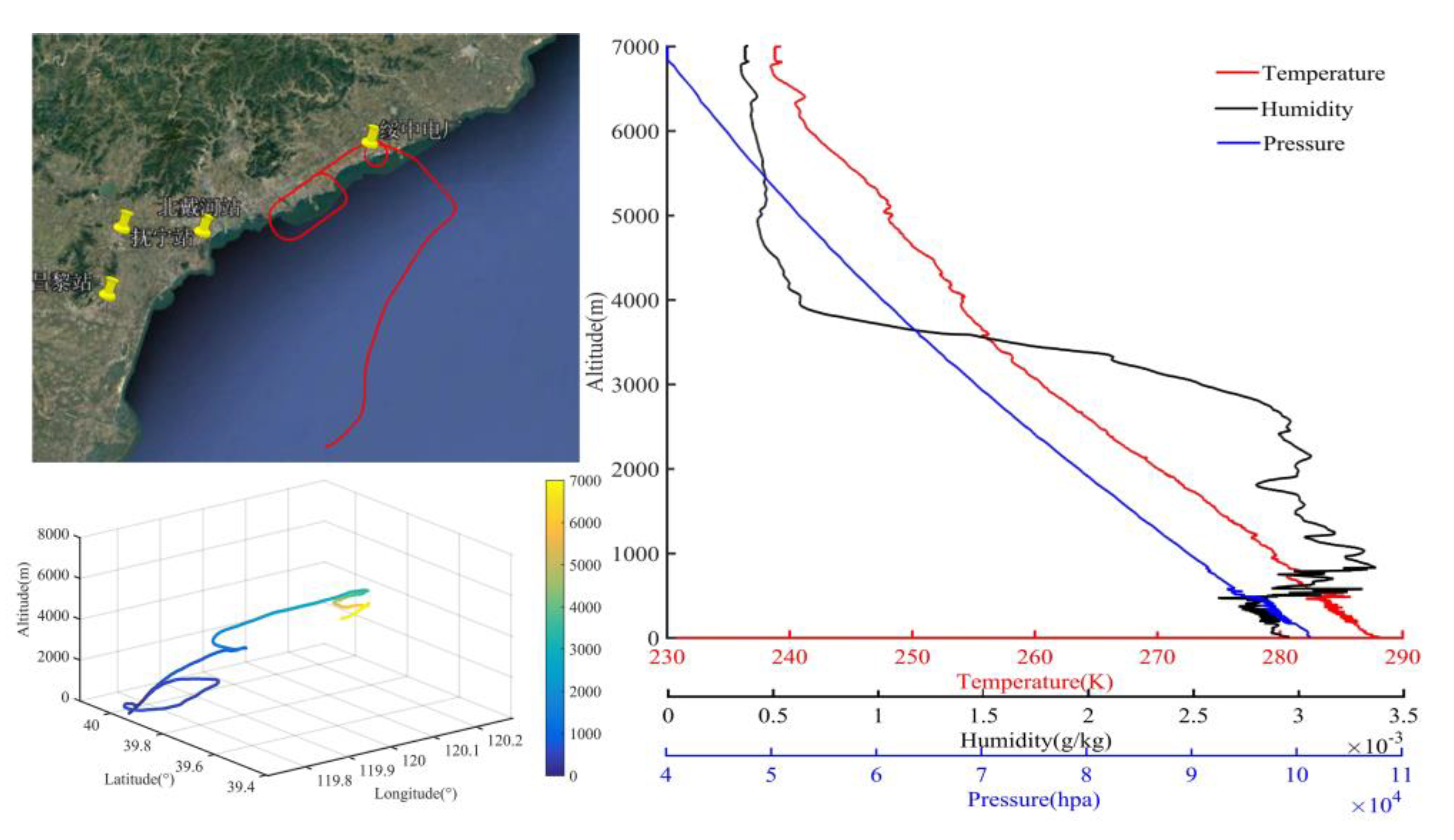
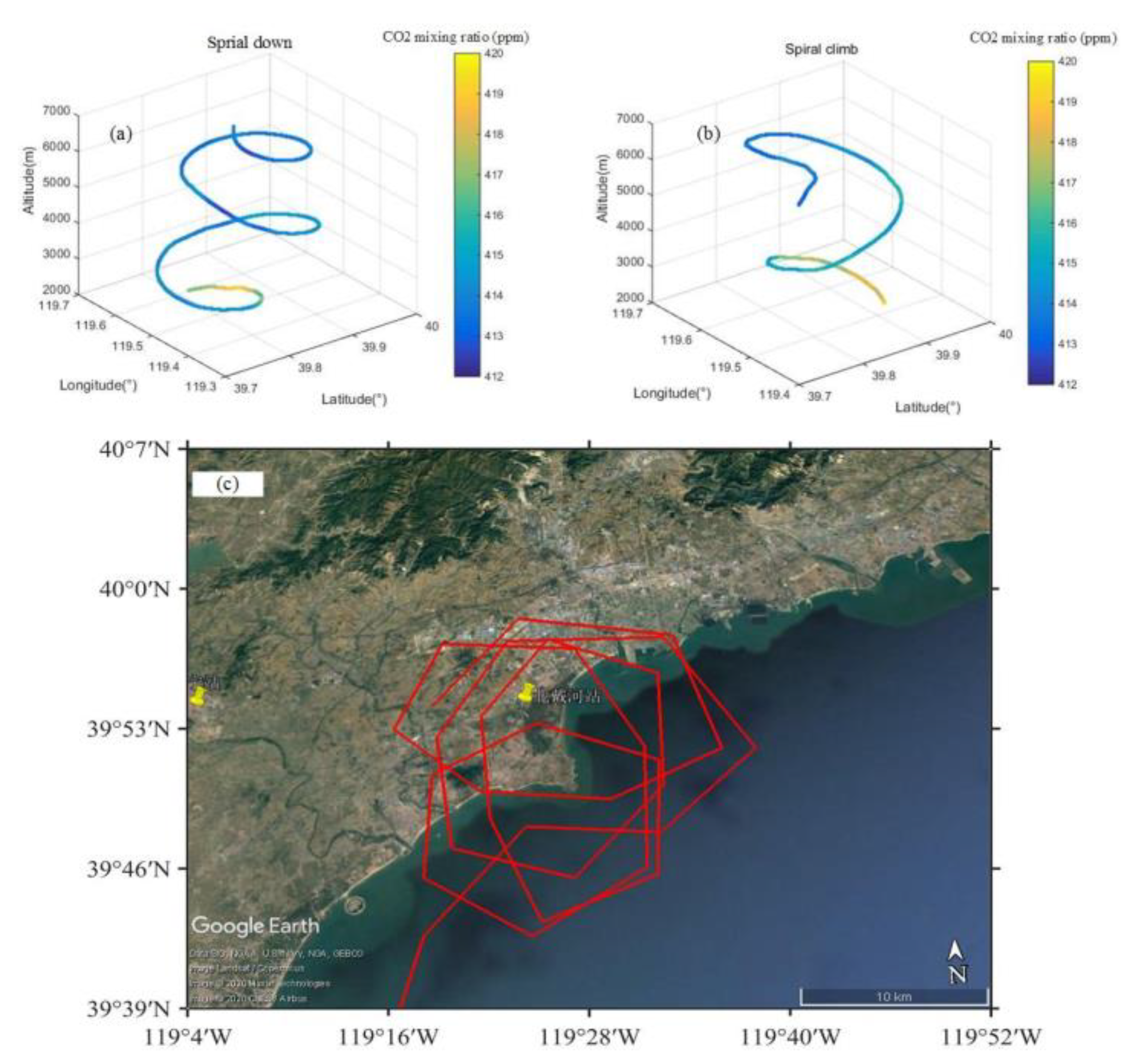
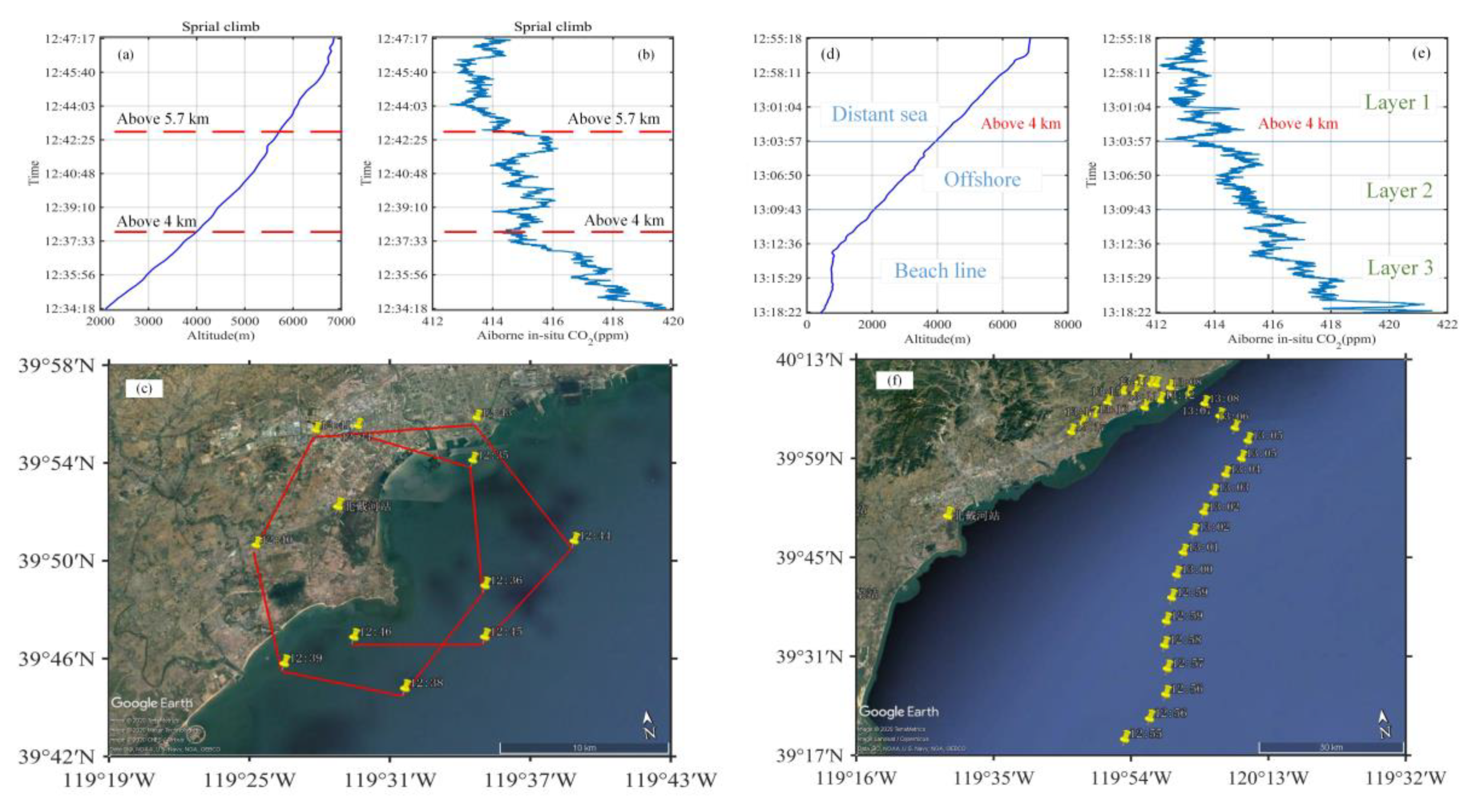
3. The Airborne Campaign
4. Data Retrieval and Analysis
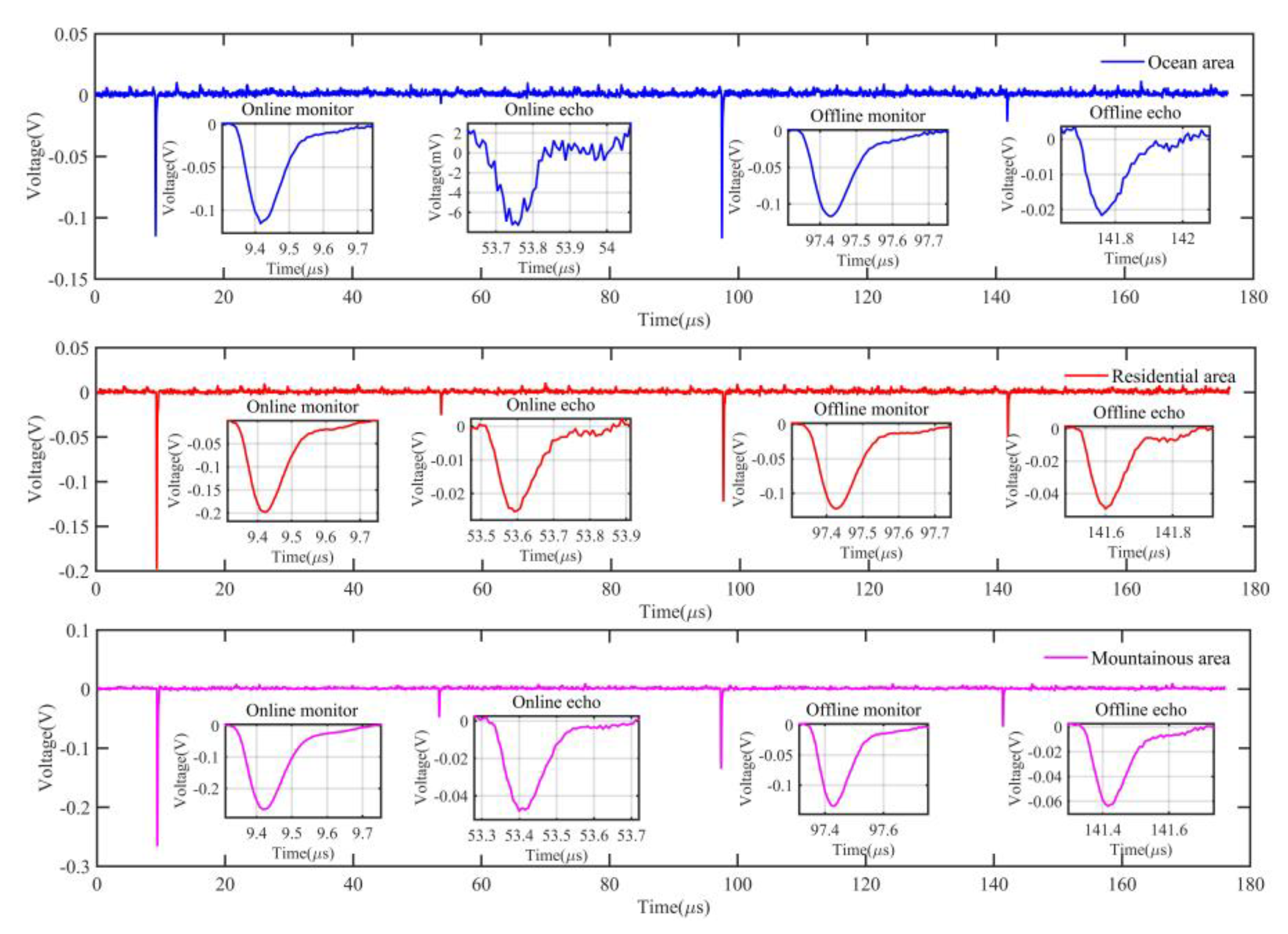
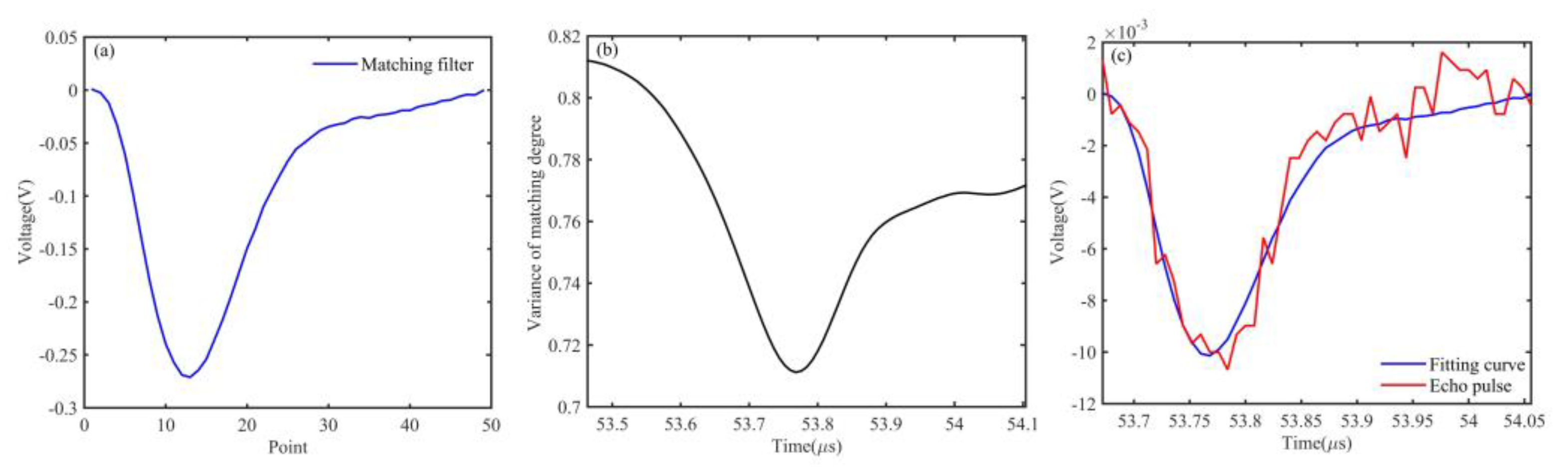
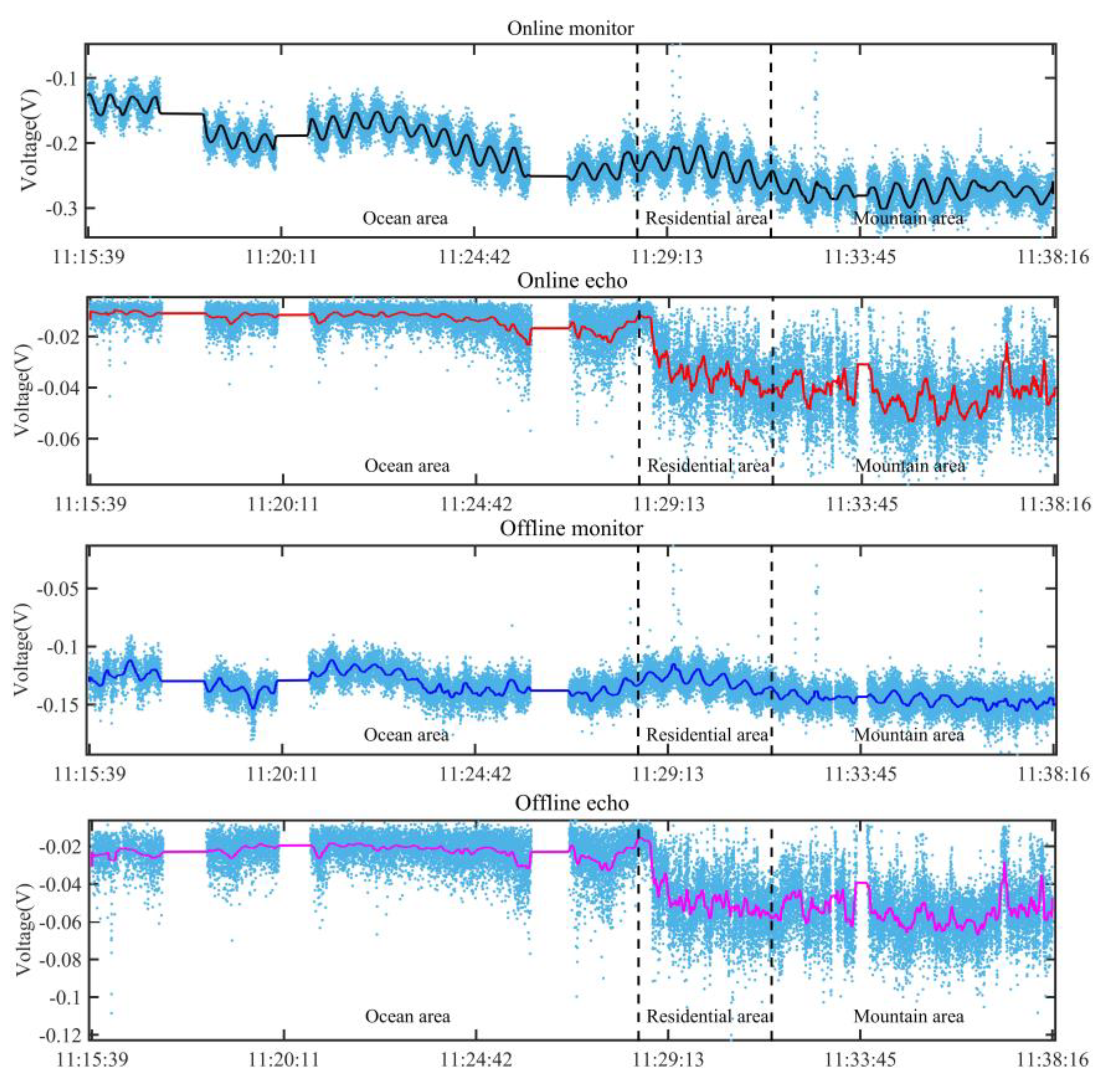
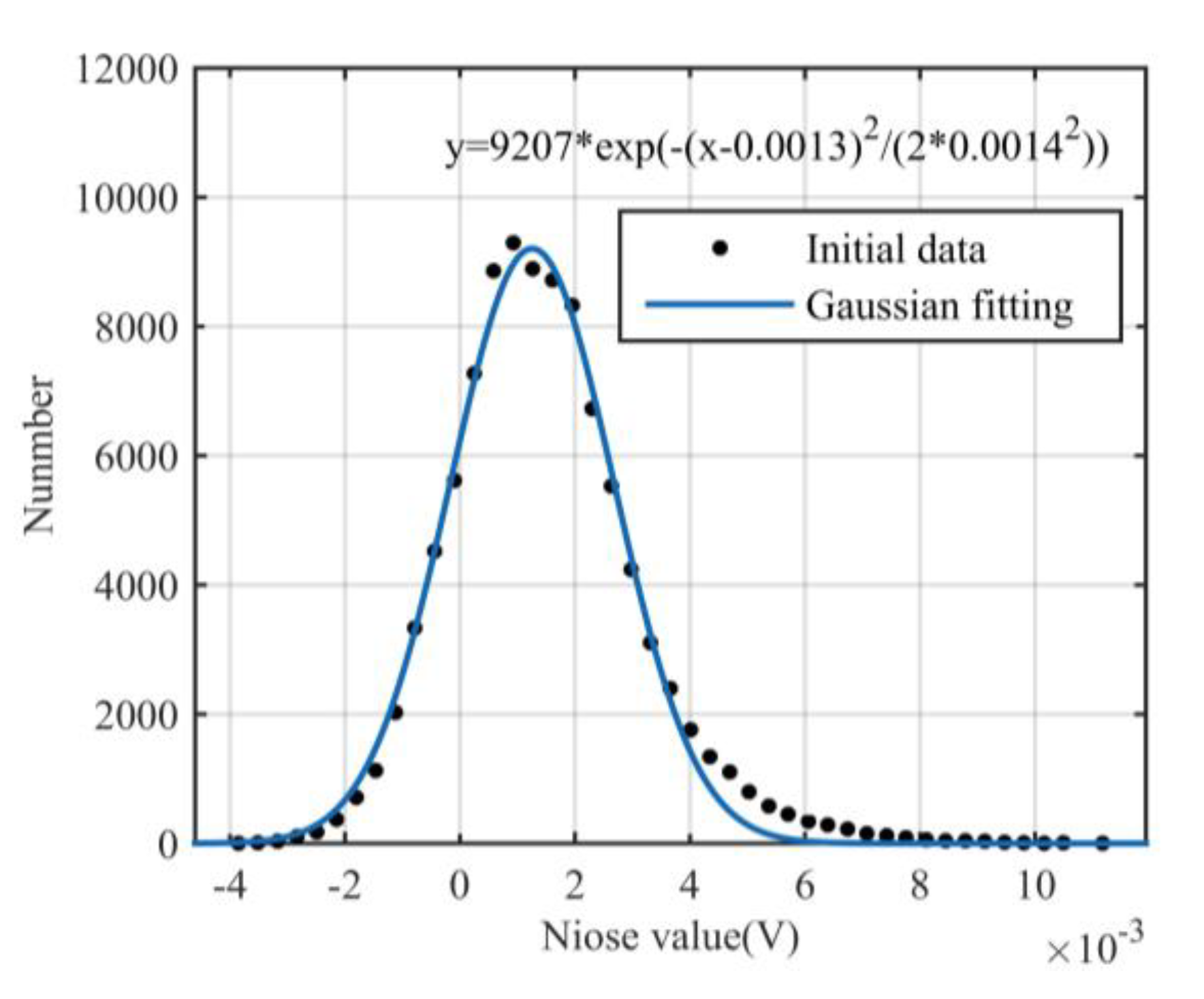
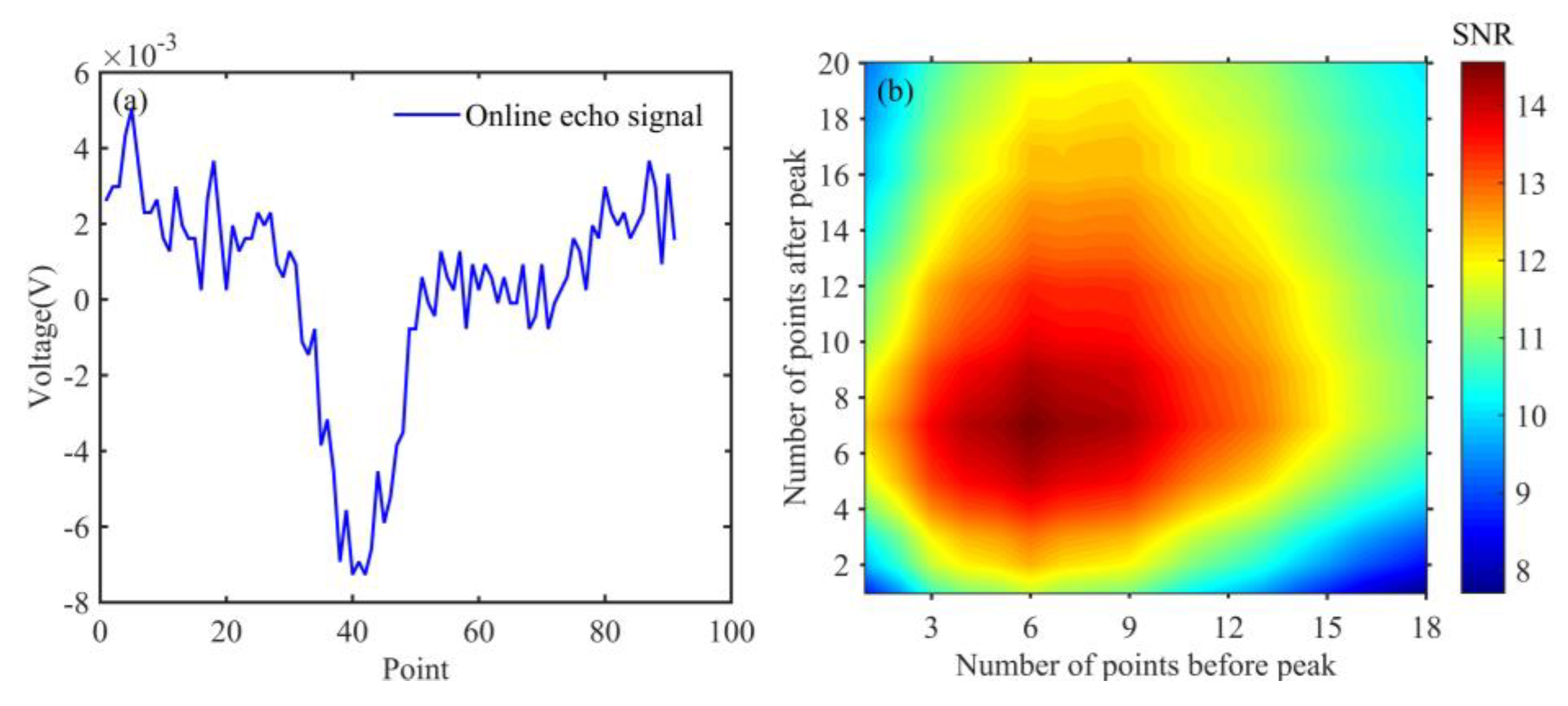
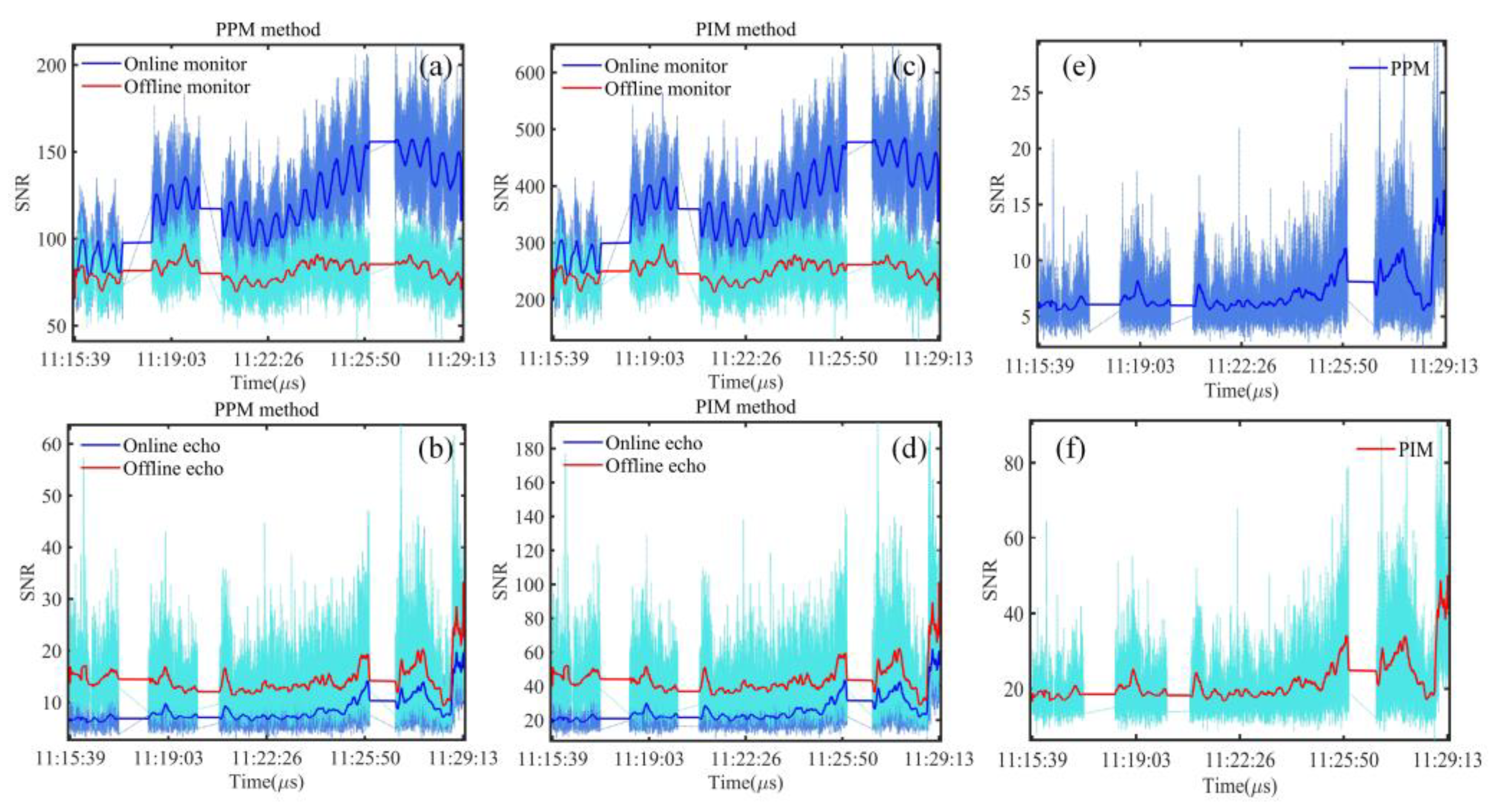
4.1. Extraction of the Weak Signal
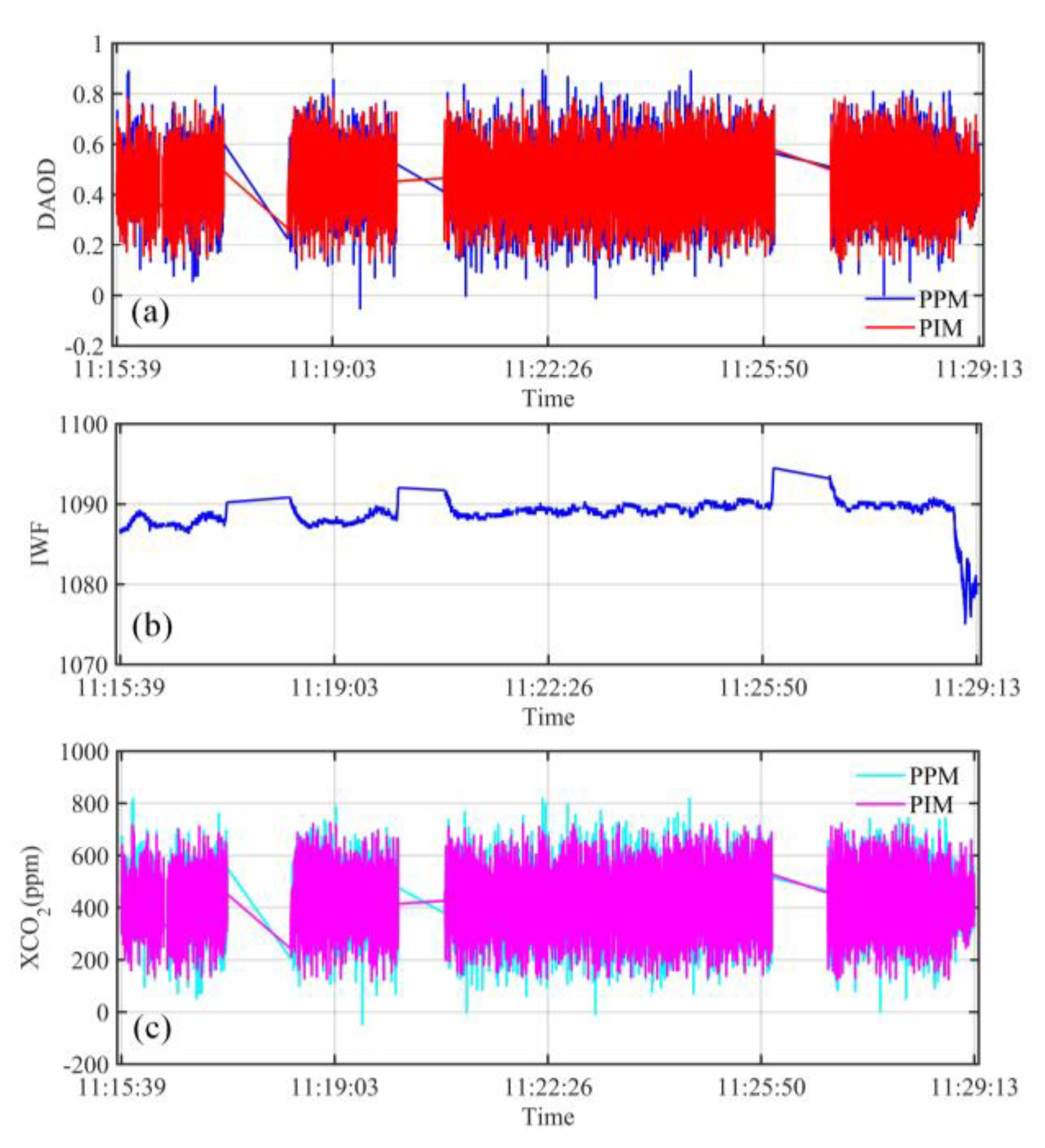
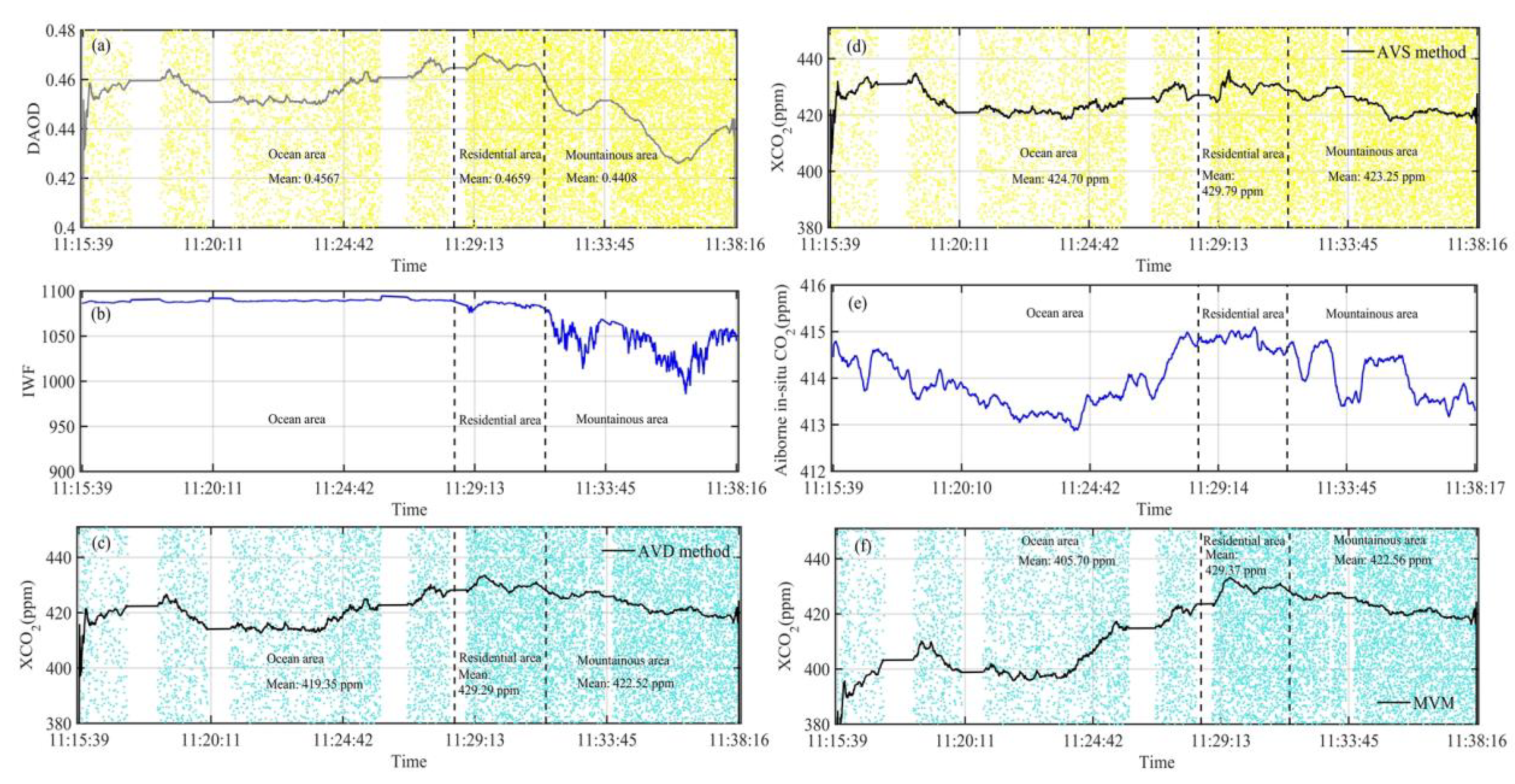
4.2. Data Processing and XCO2 Retrievals
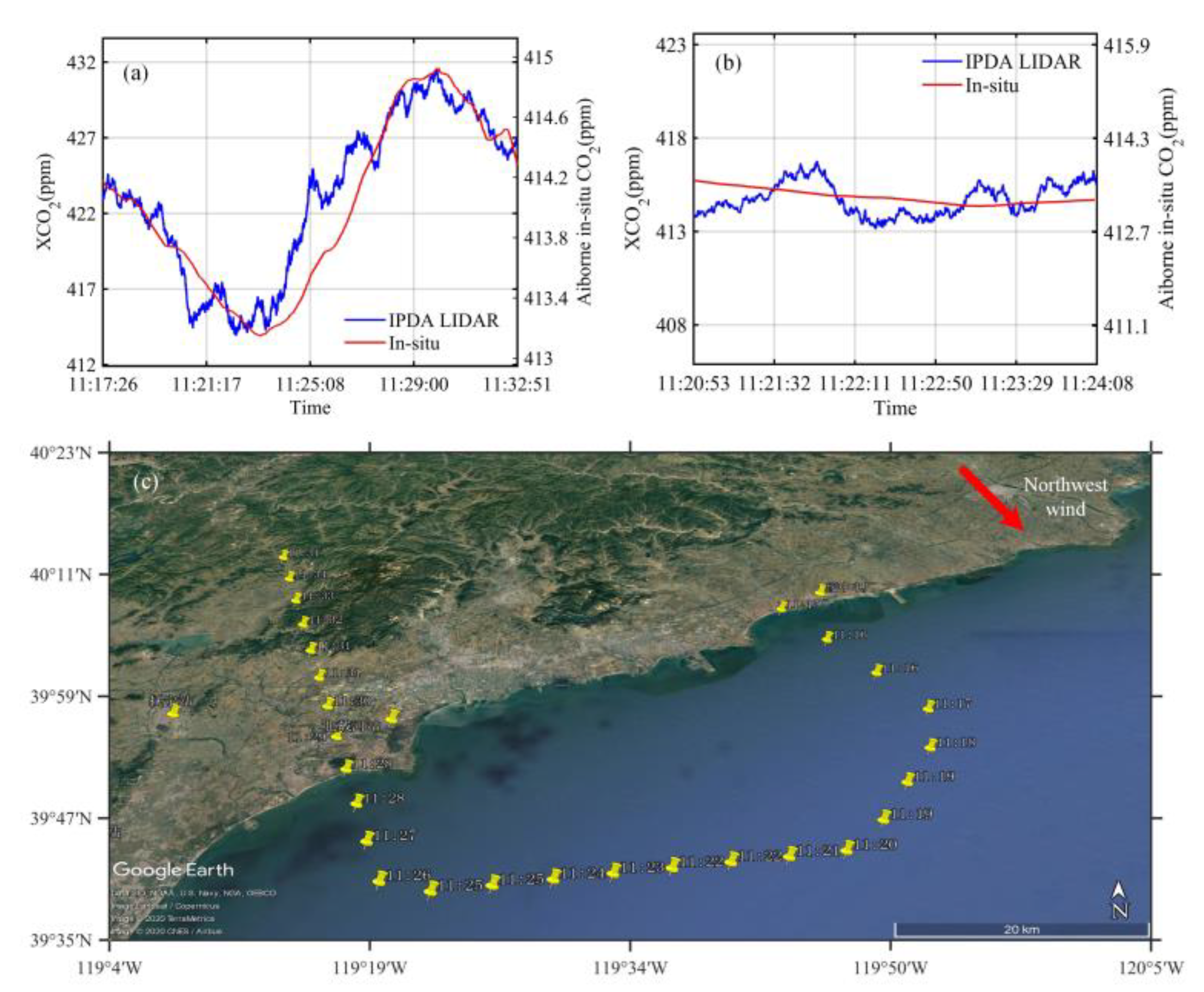
4.3. Comparisons of the IPDA LIDAR and In-Situ Instrument
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ehret, G.; Kiemle, C.; Wirth, M.; Amediek, A.; Fix, A.; Houweling, S. Space-borne remote sensing of CO2, CH4, and N2O by integrated path differential absorption lidar: A sensitivity analysis. Appl. Phys. B-Lasers O 2008, 90, 593–608. [Google Scholar] [CrossRef] [Green Version]
- Kawa, S.R.; Mao, J.; Abshire, J.B.; Collatz, G.J.; Sun, X.; Weaver, C.J. Simulation studies for a space-based CO2 lidar mission. Tellus B 2010, 62, 759–769. [Google Scholar] [CrossRef]
- Han, G.; Ma, X.; Liang, A.L.; Zhang, T.H.; Zhao, Y.N.; Zhang, M.; Gong, W. Performance Evaluation for China’s Planned CO2-IPDA. Remote Sens. 2017, 9, 768. [Google Scholar] [CrossRef] [Green Version]
- Singh, U.N.; Refaat, T.F.; Ismail, S.; Davis, K.J.; Kawa, S.R.; Menzies, R.T.; Petros, M. Feasibility study of a space-based high pulse energy 2 mu m CO2 IPDA lidar. Appl. Opt. 2017, 56, 6531–6547. [Google Scholar] [CrossRef] [PubMed]
- Han, G.; Xu, H.; Gong, W.; Liu, J.Q.; Du, J.; Ma, X.; Liang, A.L. Feasibility Study on Measuring Atmospheric CO2 in Urban Areas Using Spaceborne CO2-IPDA LIDAR. Remote Sens. 2018, 10, 985. [Google Scholar] [CrossRef] [Green Version]
- Abshire, J.B.; Ramanathan, A.; Riris, H.; Mao, J.P.; Allan, G.R.; Hasselbrack, W.E.; Weaver, C.J.; Browell, E.V. Airborne Measurements of CO2 Column Concentration and Range Using a Pulsed Direct-Detection IPDA Lidar. Remote Sens. 2014, 6, 443–469. [Google Scholar] [CrossRef] [Green Version]
- Refaat, T.F.; Singh, U.N.; Yu, J.R.; Petros, M.; Remus, R.; Ismail, S. Double-pulse 2-mu m integrated path differential absorption lidar airborne validation for atmospheric carbon dioxide measurement. Appl. Opt. 2016, 55, 4232–4246. [Google Scholar] [CrossRef]
- Amediek, A.; Ehret, G.; Fix, A.; Wirth, M.; Budenbender, C.; Quatrevalet, M.; Kiemle, C.; Gerbig, C. CHARM-F-a new airborne integrated-path differential-absorption lidar for carbon dioxide and methane observations: Measurement performance and quantification of strong point source emissions. Appl. Opt. 2017, 56, 5182–5197. [Google Scholar] [CrossRef] [PubMed]
- Du, J.; Zhu, Y.D.; Li, S.G.; Zhang, J.X.; Sun, Y.G.; Zang, H.G.; Liu, D.; Ma, X.H.; Bi, D.C.; Liu, J.Q.; et al. Double-pulse 1.57 mu m integrated path differential absorption lidar ground validation for atmospheric carbon dioxide measurement. Appl. Opt. 2017, 56, 7053–7058. [Google Scholar] [CrossRef]
- Abshire, J.B.; Ramanathan, A.K.; Riris, H.; Allan, G.R.; Sun, X.L.; Hasselbrack, W.E.; Mao, J.P.; Wu, S.; Chen, J.; Numata, K.; et al. Airborne measurements of CO2 column concentrations made with a pulsed IPDA lidar using a multiple-wavelength-locked laser and HgCdTe APD detector. Atmos. Meas. Tech. 2018, 11, 2001–2025. [Google Scholar] [CrossRef] [Green Version]
- Mao, J.P.; Ramanathan, A.; Abshire, J.B.; Kawa, S.R.; Riris, H.; Allan, G.R.; Rodriguez, M.; Hasselbrack, W.E.; Sun, X.L.; Numata, K.; et al. Measurement of atmospheric CO2 column concentrations to cloud tops with a pulsed multi-wavelength airborne lidar. Atmos. Meas. Tech. 2018, 11, 127–140. [Google Scholar] [CrossRef] [Green Version]
- Amediek, A.; Fix, A.; Ehret, G.; Caron, J.; Durand, Y. Airborne lidar reflectance measurements at 1.57 mu m in support of the A-SCOPE mission for atmospheric CO2. Atmos. Meas. Tech. 2009, 2, 755–772. [Google Scholar] [CrossRef] [Green Version]
- Yu, J.R.; Petros, M.; Singh, U.N.; Refaat, T.F.; Reithmaier, K.; Remus, R.G.; Johnson, W. An Airborne 2-mu m Double-Pulsed Direct-Detection Lidar Instrument for Atmospheric CO2 Column Measurements. J. Atmos. Ocean. Tech. 2017, 34, 385–400. [Google Scholar] [CrossRef]
- Tong, J.C.; Qu, Y.; Suo, F.; Zhou, W.; Huang, Z.M.; Zhang, D.H. Antenna-assisted subwavelength metal-InGaAs-metal structure for sensitive and direct photodetection of millimeter and terahertz waves. Photonics Res. 2019, 7, 89–97. [Google Scholar] [CrossRef]
- Liang, Y.; Fei, Q.L.; Liu, Z.H.; Huang, K.; Zeng, H.P. Low-noise InGaAs/InP single-photon detector with widely tunable repetition rates. Photonics Res. 2019, 7, A1–A6. [Google Scholar] [CrossRef]
- Zhu, Y.D.; Liu, J.Q.; Chen, X.; Zhu, X.P.; Bi, D.C.; Chen, W.B. Sensitivity analysis and correction algorithms for atmospheric CO2 measurements with 1.57-mu m airborne double-pulse IPDA LIDAR. Opt. Exp. 2019, 27, 32679–32699. [Google Scholar] [CrossRef]
- Wirth, M.; Fix, A.; Mahnke, P.; Schwarzer, H.; Schrandt, F.; Ehret, G. The airborne multi-wavelength water vapor differential absorption lidar WALES: System design and performance. Appl. Phys. B-Lasers O 2009, 96, 201–213. [Google Scholar] [CrossRef] [Green Version]
- Fix, A.; Budenbender, C.; Wirth, M.; Quatrevalet, M.; Amediek, A.; Kiemle, C.; Ehret, G. Optical Parametric Oscillators and Amplifiers for Airborne and Spaceborne Active Remote Sensing of CO2 and CH4. Lidar Technol. Tech. Meas. Atmos. Remote Sens. VII 2011, 8182. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zhu, X.L.; Li, S.G.; Ma, X.H.; Xie, W.; Liu, J.Q.; Chen, W.B.; Zhu, R. Frequency Stabilization of Pulsed Injection-Seeded OPO Based on Optical Heterodyne Technique. Chin. Phys. Lett. 2018, 35, 024201. [Google Scholar] [CrossRef]
- Wang, A.Q.; Meng, Z.X.; Feng, Y.Y. Widely tunable laser frequency offset locking to the atomic resonance line with frequency modulation spectroscopy. Chin. Opt. Lett. 2018, 16. [Google Scholar] [CrossRef]
- Mu, Y.J.; Du, J.; Yang, Z.G.; Sun, Y.G.; Liu, J.Q.; Hou, X.; Chen, W.B. Design and simulation of a biconic multipass absorption cell for the frequency stabilization of the reference seeder laser in IPDA lidar. Appl. Opt. 2016, 55, 7106–7112. [Google Scholar] [CrossRef] [PubMed]
- Wei, C.H.; Yan, S.H.; Jia, A.A.; Luo, Y.K.; Hu, Q.Q.; Li, Z.H. Compact phase-lock loop for external cavity diode lasers. Chin. Opt. Lett. 2016, 14. [Google Scholar] [CrossRef] [Green Version]
- Du, J.; Sun, Y.G.; Chen, D.J.; Mu, Y.J.; Huang, M.J.; Yang, Z.G.; Liu, J.Q.; Bi, D.C.; Hou, X.; Chen, W.B. Frequency-stabilized laser system at 1572 nm for space-borne CO2 detection LIDAR. Chin. Opt. Lett. 2017, 15, 031401. [Google Scholar]
- Luchinin, A.G. Complex modulation of airborne lidar light pulse: The effects of rough sea surface and multiple scattering. Proc. SPIE. 2012, 8532. [Google Scholar] [CrossRef]
- Liu, M.G.; Yan, H.; Chen, W.B.; Wang, Y.X.; Hou, X.; Shi, X.G.; Huang, T.C.; Zhang, Y.F. Adaptive Depth Extraction Algorithm for Ocean Lidar. Chin. J. Lasers 2018, 45, 277–284. [Google Scholar]
- Wei, X.F.; Chong, J.S.; Zhao, Y.W.; Li, Y.; Yao, X.N. Airborne SAR Imaging Algorithm for Ocean Waves Based on Optimum Focus Setting. Remote Sens. 2019, 11, 564. [Google Scholar] [CrossRef] [Green Version]
- Disney, M.I.; Lewis, P.E.; Bouvet, M.; Prieto-Blanco, A.; Hancock, S. Quantifying Surface Reflectivity for Spaceborne Lidar via Two Independent Methods. IEEE Trans. Geosci. Remote 2009, 47, 3262–3271. [Google Scholar] [CrossRef]
- Kiemle, C.; Kawa, S.R.; Quatrevalet, M.; Browell, E.V. Performance simulations for a spaceborne methane lidar mission. J. Geophys. Res.-Atmos. 2014, 119, 4365–4379. [Google Scholar] [CrossRef] [Green Version]
- Refaat, T.F.; Singh, U.N.; Yu, J.R.; Petros, M.; Ismail, S.; Kavaya, M.J.; Davis, K.J. Evaluation of an airborne triple-pulsed 2 mu m IPDA lidar for simultaneous and independent atmospheric water vapor and carbon dioxide measurements. Appl. Opt. 2015, 54, 1387–1398. [Google Scholar] [CrossRef]
- Gordon, I.E.; Rothman, L.S.; Hill, C.; Kochanov, R.V.; Tan, Y.; Bernath, P.F.; Birk, M.; Boudon, V.; Campargue, A.; Chance, K.V.; et al. The HITRAN2016 molecular spectroscopic database. J. Quant. Spectrosc. Radiat. 2017, 203, 3–69. [Google Scholar] [CrossRef]
- Tellier, Y.; Pierangelo, C.; Wirth, M.; Gibert, F.; Marnas, F. Averaging bias correction for the future space-borne methane IPDA lidar mission MERLIN. Atmos. Meas. Tech. 2018, 11, 5865–5884. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Online wavelength | 1572.024 nm | Pressure of CO2 gas cell | 70 mbar |
| Offline wavelength | 1572.085 nm | Receiver optical efficiency | 0.3797 |
| Pulse energy (on/off) | 6/3 mJ | Estimated flight altitude | 8 km |
| Pulse width (on/off) | 17 ns | Telescope diameter | 150 mm |
| Pulse separation | 200 µs | Field of view | 1 mrad |
| Frequency stability (RMS) | 2.7 MHz | Detector type | IAG350H1D |
| Repetition frequency | 30 Hz | Responsivity | 0.94 A/W |
| Beam divergence | 0.62 mrad | NEP | 64 |
| Pulse spectral linewidth (OPA) | 30 MHz | Excess noise factor | 3.2 (@M = 10) |
| Emission optical efficiency | 0.8955 | Data acquisition | 125 MS/s |
| Optical path of CO2 gas cell | 12.9 m | Optical filter bandwidth | 0.45 nm |
| Inversion Method | Ocean Area | Residential Area | Mountainous Area |
|---|---|---|---|
| AVS | 424.70 ppm | 429.79 ppm | 423.25 ppm |
| AVD | 419.35 ppm | 429.29 ppm | 422.52 ppm |
| MVM | 405.70 ppm | 429.37 ppm | 422.56 ppm |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Yang, J.; Chen, X.; Zhu, X.; Zhang, J.; Li, S.; Sun, Y.; Hou, X.; Bi, D.; Bu, L.; et al. Airborne Validation Experiment of 1.57-μm Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement. Remote Sens. 2020, 12, 1999. https://doi.org/10.3390/rs12121999
Zhu Y, Yang J, Chen X, Zhu X, Zhang J, Li S, Sun Y, Hou X, Bi D, Bu L, et al. Airborne Validation Experiment of 1.57-μm Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement. Remote Sensing. 2020; 12(12):1999. https://doi.org/10.3390/rs12121999
Chicago/Turabian StyleZhu, Yadan, Juxin Yang, Xiao Chen, Xiaopeng Zhu, Junxuan Zhang, Shiguang Li, Yanguang Sun, Xia Hou, Decang Bi, Lingbing Bu, and et al. 2020. "Airborne Validation Experiment of 1.57-μm Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement" Remote Sensing 12, no. 12: 1999. https://doi.org/10.3390/rs12121999
APA StyleZhu, Y., Yang, J., Chen, X., Zhu, X., Zhang, J., Li, S., Sun, Y., Hou, X., Bi, D., Bu, L., Zhang, Y., Liu, J., & Chen, W. (2020). Airborne Validation Experiment of 1.57-μm Double-Pulse IPDA LIDAR for Atmospheric Carbon Dioxide Measurement. Remote Sensing, 12(12), 1999. https://doi.org/10.3390/rs12121999