Toronto Water Vapor Lidar Inter-Comparison Campaign



Abstract
1. Introduction
2. Materials and Methods
2.1. Field Campaign Site
2.2. York Raman Lidar
2.3. Vaisala DIAL
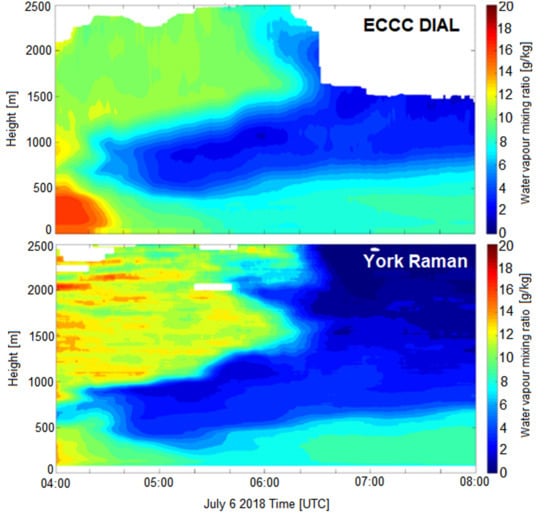
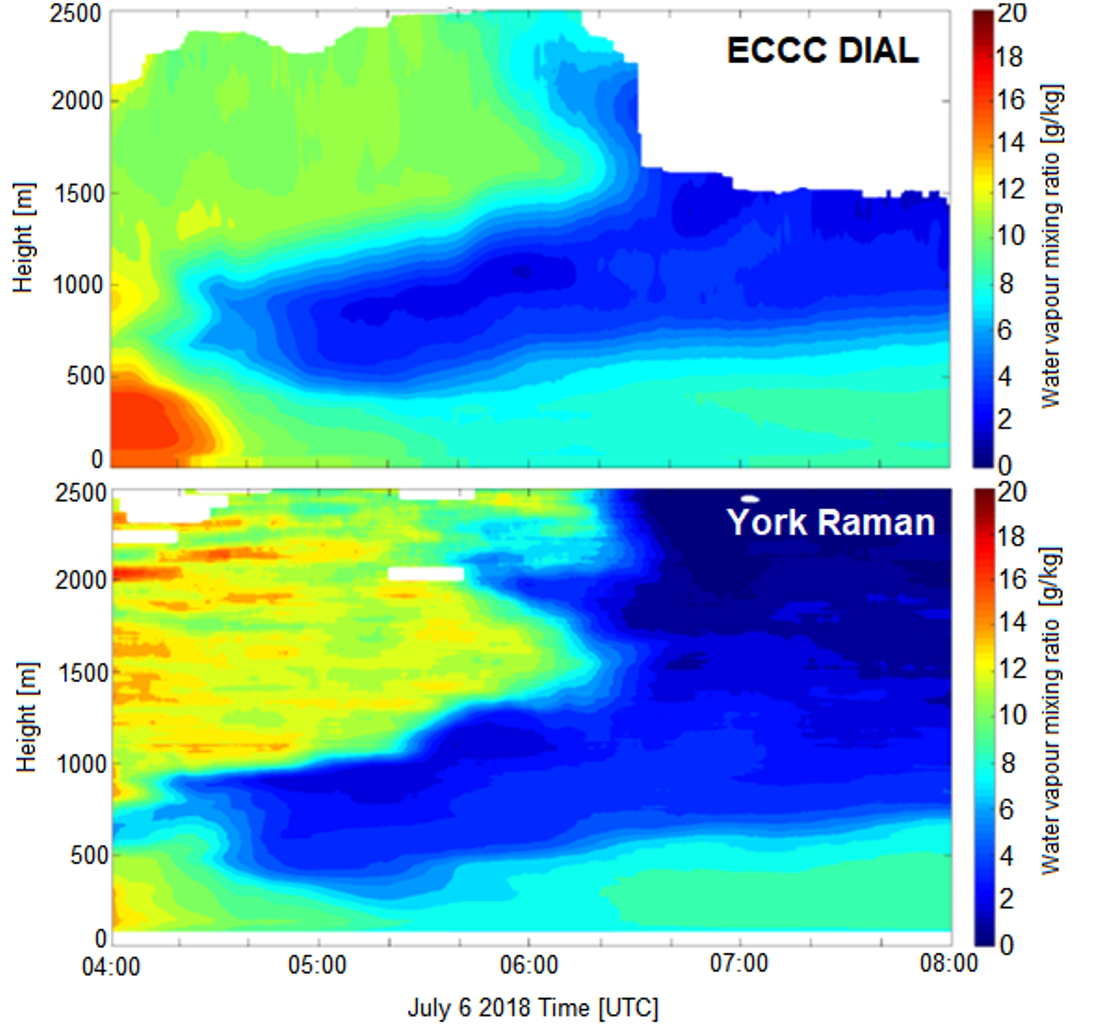
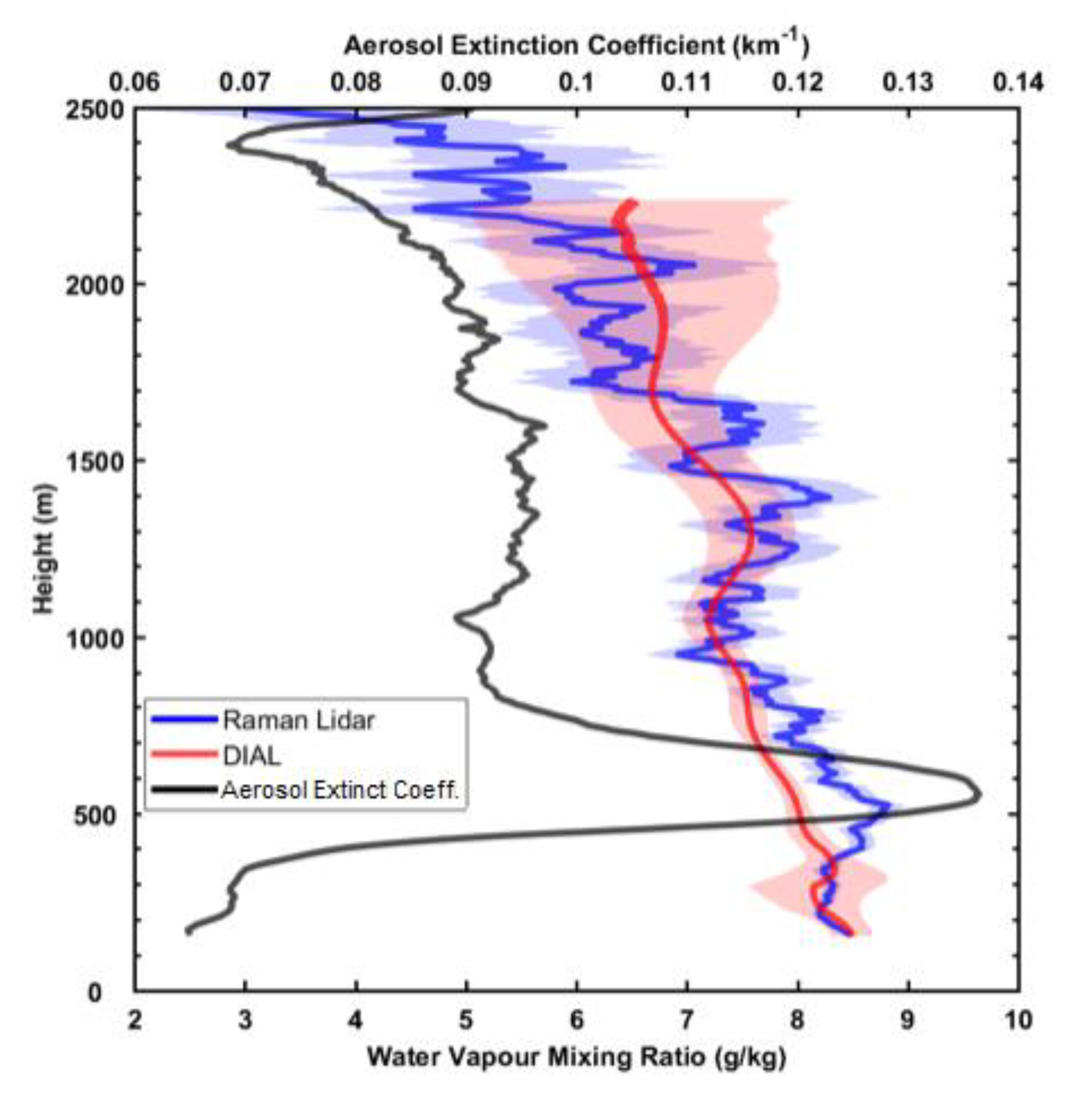
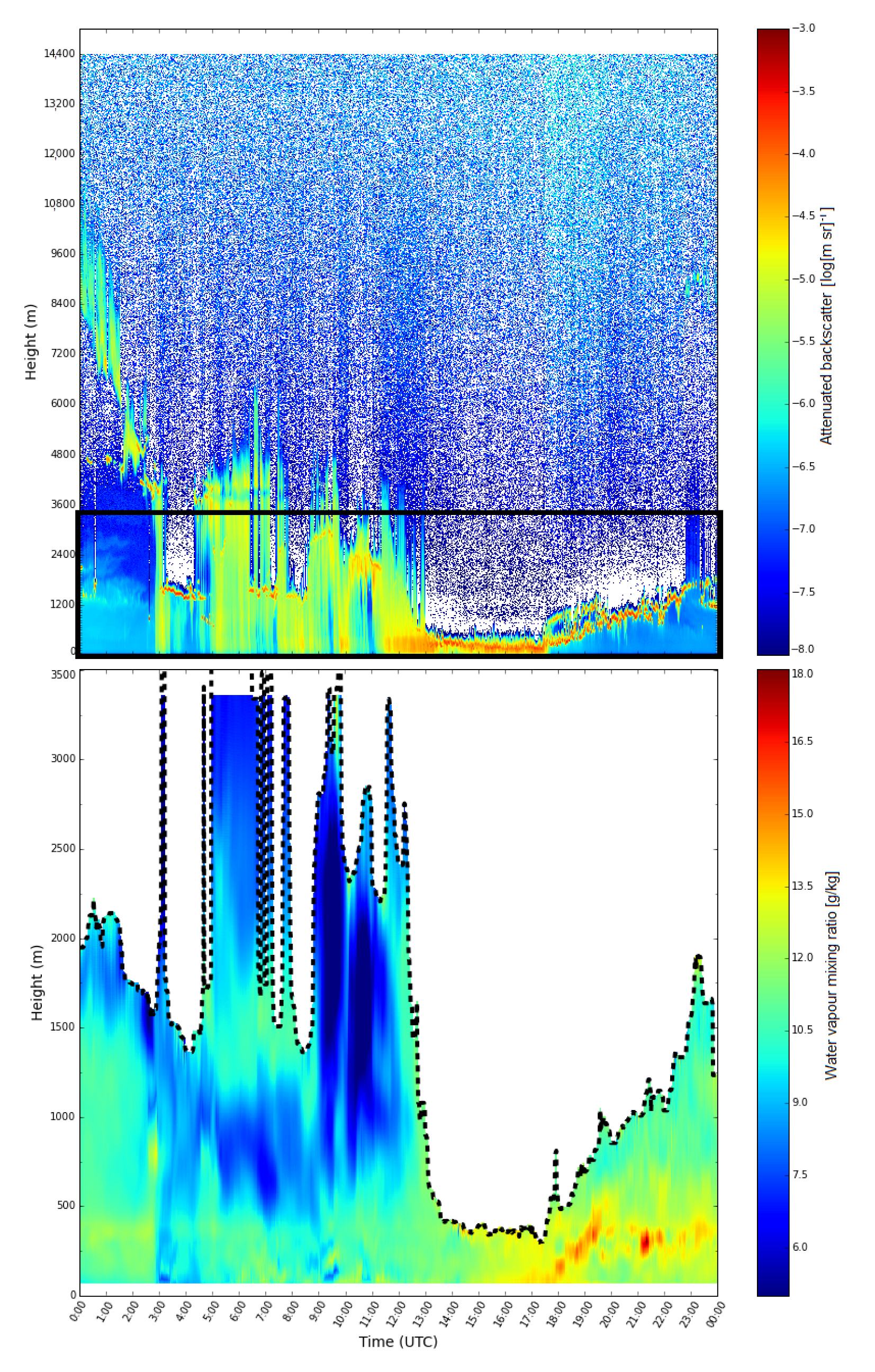
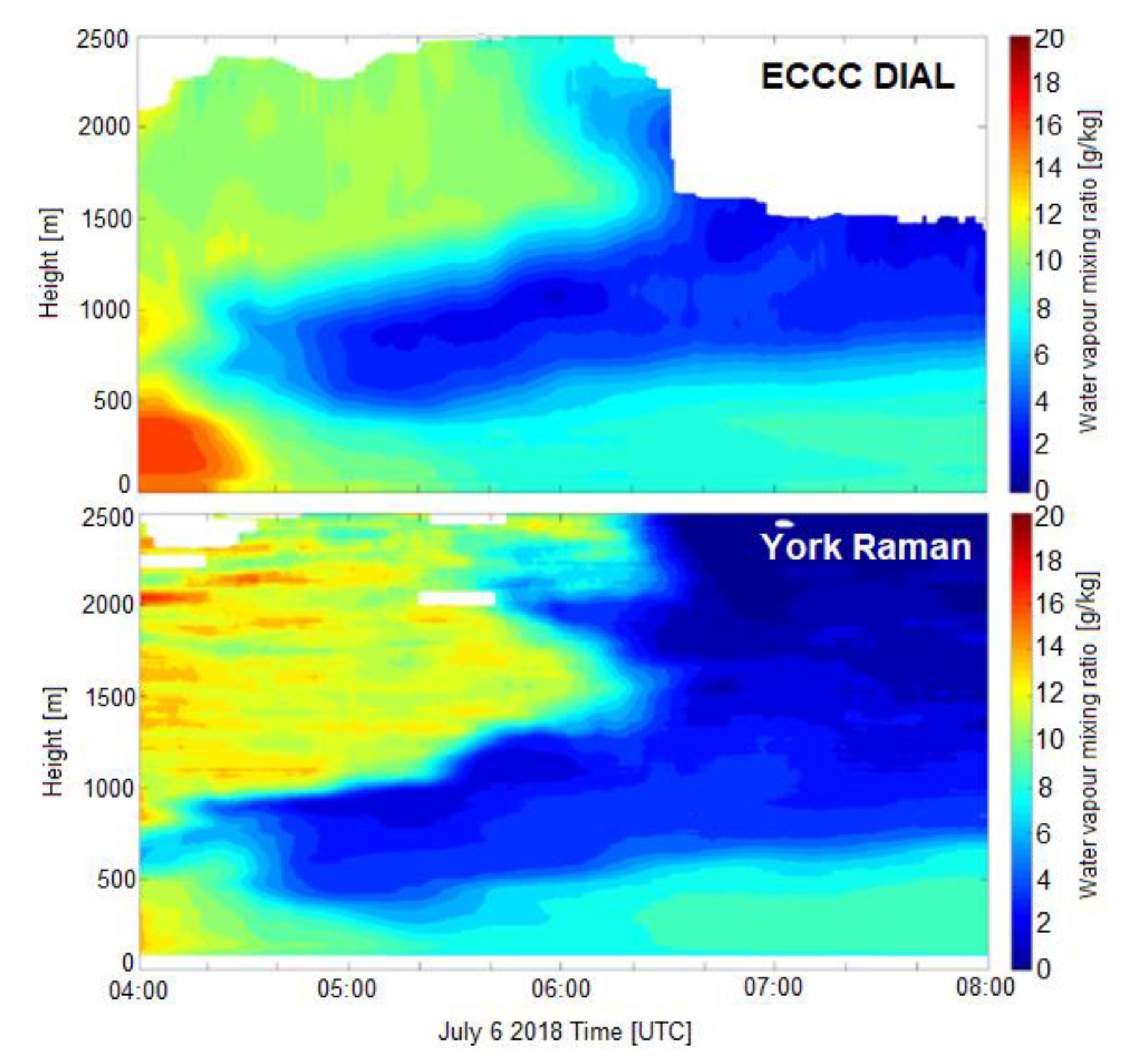
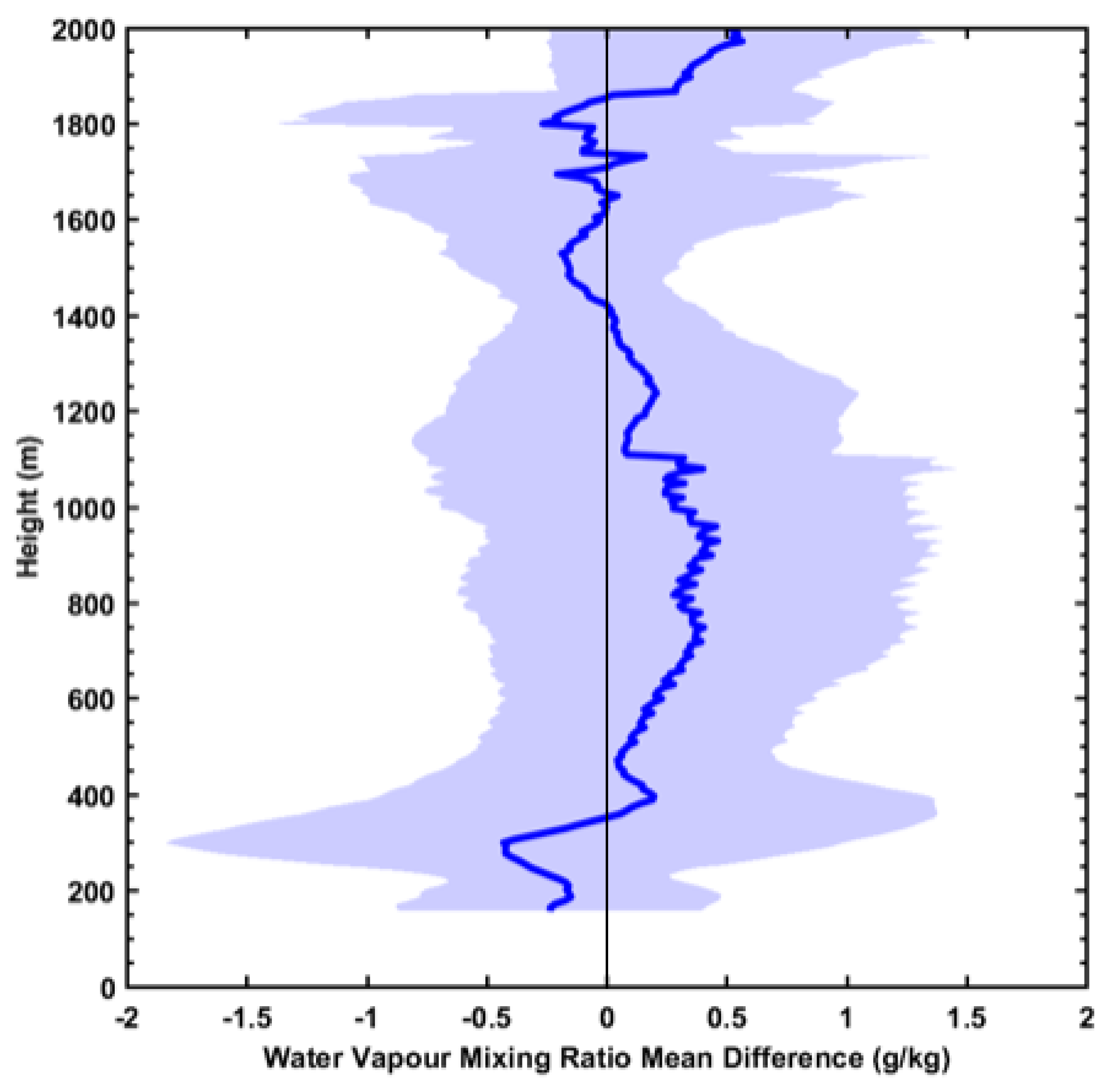
3. Results and Discussion
DIAL and Raman Lidar Comparisons
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dessler, A.E.; Zhang, Z.; Yang, P. Water vapor climate feedback inferred from climate fluctuations, 2003–2008. Geophys. Res. Lett. 2008, 35, L20704. [Google Scholar] [CrossRef]
- Joe, P.; Melo, S.; Burrows, W.; Casati, B.; Crawford, R.; Deghan, A.; Gascon, G.; Mariani, Z.; Milbrandt, J.; Strawbridge, K. The Canadian Arctic Weather Science Project: Introduction to the Iqaluit Site. Bull. Am. Meteorol. Soc. 2019, 101. [Google Scholar] [CrossRef]
- Weaver, D.; Strong, K.; Schneider, M.; Rowe, P.M.; Walker, C.; Sioris, K.A.; Mariani, Z.; Uttal, T.; McElroy, C.T.; Vomel, H. Intercomparison of atmospheric water vapour measurements at a Canadian High Arctic site. Atmos. Meas. Tech. 2017, 10, 2851–2880. [Google Scholar] [CrossRef]
- Melfi, S.H. Remote measurements of the atmosphere using Raman scattering. App. Opt. 1972, 11, 1605–1610. [Google Scholar] [CrossRef] [PubMed]
- Whiteman, D.N. Examination of the traditional Raman lidar technique II Evaluating the ratios for water vapor and aerosols. Appl. Opt. 2003, 42, 2593. [Google Scholar] [CrossRef] [PubMed]
- Bosenberg, J. Ground-based differential absorption lidar for water-vapor and temperature profiling: Methodology. Appl. Opt. 1998, 37, 3845–3860. [Google Scholar] [CrossRef] [PubMed]
- Karapuzikov, A.; Malov, A.N.; Sherstov, I.V. Tunable TEA CO2 laser for long-range DIAL lidar. IR Phys. Technol. 2000, 41, 77–85. [Google Scholar] [CrossRef]
- Godin-Bekmann, S.; Porteneuve, J.; Garnier, A. Systematic DIAL lidar monitoring of the stratospheric ozone vertical distribution at Observatoire de Haute-Provence (43.92°N, 5.71°E). J. Environ. Monit. 2002, 5, 57–67. [Google Scholar] [CrossRef] [PubMed]
- Kiemle, C.; Ehret, G.; Giez, A.; Davis, K.J.; Lenschow, D.H.; Oncley, S.P. Estimation of boundary layer humidity fluxes and statistics from airborne differential absorption lidar (DIAL). J. Geophys. Res. 1997, 102, 29189–29203. [Google Scholar] [CrossRef]
- Nehrir, A.; Repasky, K.S.; Carlsten, J.L.; Obland, M.D.; Shaw, J.A. Water vapour profiling using a widely tuneable amplified diode-laser based differential absorption lidar (DIAL). J. Atmos. Ocean. Tech. 2009, 26, 737–745. [Google Scholar] [CrossRef]
- Baron, P.; Ishii, S.; Mizutani, K.; Itabe, T.; Yasui, M. Profiling tropospheric water vapour with a coherent infrared differential absorption lidar: A sensitivity analysis. In Proceedings of the Lidar Remote Sensing for Environmental Monitoring XIII, Kyoto, Japan, 29 October–1 November 2012; Volume 8526, p. 85260D. [Google Scholar] [CrossRef]
- Spuler, S.M.; Repasky, K.S.; Morley, B.; Moen, D.; Hayman, M.; Nehrir, A.R. Field-deployable diode-laser-based differential absorption lidar (DIAL) for profiling water vapor. Atmos. Meas. Tech. 2015, 8, 1073–1087. [Google Scholar] [CrossRef]
- Imaki, M.; Tanaka, H.; Hirosawa, K.; Yanagisawa, T.; Kameyama, S. Demonstration of the 1.53-µm coherent DIAL for simultaneous profiling of water vapor density and wind speed. Opt. Express 2020, 28, 27078–27096. [Google Scholar] [CrossRef] [PubMed]
- Machol, J.; Ayers, T.; Schwenz, K.T.; Koenig, K.W.; Hardesty, R.M.; Senff, C.J.; Krainak, M.A.; Abshire, J.B.; Bravo, H.E.; Sandberg, S.P. Preliminary measurements with an automated compact differential absorption lidar for profiling water vapour. App. Opt. 2014, 45, 3110. [Google Scholar]
- Poberaj, G.; Fix, A.; Assion, A.; Wirth, M.; Kiemle, C.; Ehret, G. Airborne all-solid-state DIAL for water vapour measurements in the tropopause region: System description and assessment of accuracy. Appl. Phys. B 2002, 75, 165–172. [Google Scholar] [CrossRef]
- Gerard, E.; Tan, D.G.H.; Garand, L.; Wulfmeyer, V.; Ehret, G.; Di Girolamo, P. Major advances in humidity profiling from the water vapour lidar experiment in space (WALES). Bull. Am. Meteorol. Soc. 2004, 85, 237–252. [Google Scholar] [CrossRef]
- Browell, E.V.; Ismail, S.; Grant, W.B. (Differential absorption lidar (DIAL) measurements from air and space. Appl. Phys. B 1998, 67, 399–410. [Google Scholar] [CrossRef]
- Newsom, R.K.; Turner, D.D.; Lehtinen, R.; Münkel, C.; Kallio, J.; Roininen, R. Evaluation of a compact broadband differential absorption lidar for routine water vapor profiling in the atmospheric boundary layer. J. Atmos. Ocean. Technol. 2020, 37, 47–65. [Google Scholar] [CrossRef]
- Roininen, R.; Münkel, C. Results from Continuous Atmospheric Boundary Layer Humidity Profiling with a Compact DIAL Instrument. In Proceedings of the Eighth Symposium on Lidar Atmospheric Applications, Seattle, WA, USA, 23 January 2017; American Meteorologic Society: Boston, MA, USA, 2017; Volume 12.3. Available online: https://ams.confex.com/ams/97Annual/webprogram/Paper301717.html (accessed on 14 July 2020).
- Münkel, C.; Roininen, R. Results from continuous atmospheric boundary layer humidity profiling with a compact DIAL instrument. In Proceedings of the European Conference for Applied Meteorology and Climatology, Dublin, Ireland, 4–8 September 2017; European Meteorological Society: Berlin, Germany, 2017; Volume 525. [Google Scholar]
- Mariani, Z.; Dehghan, A.; Sills, D.M.; Joe, P. Observations of lake breeze events during the Toronto 2015 pan-American games. Boundary Layer Meteorol. 2018, 166, 113–135. [Google Scholar] [CrossRef]
- Seabrook, J.A.; Whiteway, J.A.; Staebler, R.M.; Bottenheim, J.W.; Komguem, L.; Gray, L.H.; Barber, D.; Asplin, M. LIDAR measurements of Arctic boundary layer ozone depletion events over the frozen Arctic Ocean. J. Geophys. Res. 2011, 116, D00S02. [Google Scholar] [CrossRef]
- Seabrook, J.A.; Whiteway, J.A.; Gray, L.H.; Staebler, R.; Herber, A. Airborne lidar measurements of surface ozone depletion over Arctic sea ice. Atmos. Chem. Phys. 2013, 13, 6023–6029. [Google Scholar] [CrossRef]
- Aggarwal, M.; Whiteway, J.; Seabrook, J.; Gray, L.; Strawbridge, K.; Liu, P.; O’Brien, J.; Li, S.M.; McLaren, R. Airborne lidar measurements of aerosol and ozone above the Canadian oil sands region. Atmos. Meas. Tech. 2018, 11, 3829–3849. [Google Scholar] [CrossRef]
- Fernald, F.G. Analysis of atmospheric lidar observations: Some comments. App. Opt. 1984, 23, 652–653. [Google Scholar] [CrossRef] [PubMed]
- Wulfmeyer, V.; Hardesty, R.M.; Turner, D.D.; Behrendt, A.; Cadeddu, M.P.; Di Girolamo, P.; Schlüssel, P.; Van Baelen, J.; Zus, F. A review of the remote sensing of lower tropospheric thermodynamic profiles and its indispensable role for the understanding and the simulation of water and energy cycles. Rev. Geophys. 2015, 53, 819–895. [Google Scholar] [CrossRef]
- Dabberdt, W.F.; Munkel, C.; Kallio, J.; Komppula, M.; Laukkanen, S.; O’Connor, E.J. Advances in Continuous Atmospheric Boundary Layer Humidity Profiling with a Compact DIAL Instrument. In Proceedings of the 18th Symposium on Meteorological Observation and Instrumentation, New Orleans, LA, USA, 13 January 2016; American Meteorological Society: Boston, MA, USA, 2016; Volume 8.4. Available online: https://ams.confex.com/ams/96Annual/webprogram/Paper285586.html (accessed on 14 July 2020).
- Mariani, Z.; Crawford, R.; Casati, B.; Lemay, F. A Multi-year evaluation of doppler lidar wind-profile observations in the Arctic. Remote Sens 2020, 12, 323. [Google Scholar] [CrossRef]
- Mariani, Z.; Dehghan, A.; Gascon, G.; Joe, P.; Hudak, D.; Strawbridge, K.; Corriveau, J. Multi-instrument observations of prolonged stratified wind layers at Iqaluit, Nunavut. Res. Lett. 2018, 45, 1654–1660. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lidar | Vaisala DIAL | York Raman |
|---|---|---|
| Dimensions | 1.97 × 0.85 × 0.58 m (1.90 × 0.70 × 0.70 m) | 1.3 × 0.6 × 0.6 m + power supply |
| Weight (including shelter) | 150 kg (130 kg) | ~200 kg |
| Averaging time/reporting interval | 20 min/1 min (no change) | 20 min/10 s |
| Maximum range: backscatter | 14.4 km (15 km) | ~30 km |
| Minimum/maximum range: water vapor | 50 m/~3 km (no change) | 120 m/4 km |
| Range reporting interval | 4.8 m (10 m) | 7.5 m |
| Range resolution | 100–500 m (no change) | 7.5 m |
| Pulse energy | 9 μJ (5.5 μJ) | 100 mJ |
| Pulse repetition rate | 10 kHz (8 kHz) | 20 Hz |
| Wavelength (online/offline) | 911.0/910.6 nm (no change) | 355 nm emitted; 355, 387, and 407 nm received |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mariani, Z.; Stanton, N.; Whiteway, J.; Lehtinen, R. Toronto Water Vapor Lidar Inter-Comparison Campaign. Remote Sens. 2020, 12, 3165. https://doi.org/10.3390/rs12193165
Mariani Z, Stanton N, Whiteway J, Lehtinen R. Toronto Water Vapor Lidar Inter-Comparison Campaign. Remote Sensing. 2020; 12(19):3165. https://doi.org/10.3390/rs12193165
Chicago/Turabian StyleMariani, Zen, Noah Stanton, James Whiteway, and Raisa Lehtinen. 2020. "Toronto Water Vapor Lidar Inter-Comparison Campaign" Remote Sensing 12, no. 19: 3165. https://doi.org/10.3390/rs12193165
APA StyleMariani, Z., Stanton, N., Whiteway, J., & Lehtinen, R. (2020). Toronto Water Vapor Lidar Inter-Comparison Campaign. Remote Sensing, 12(19), 3165. https://doi.org/10.3390/rs12193165