Detecting Long-Term Urban Forest Cover Change and Impacts of Natural Disasters Using High-Resolution Aerial Images and LiDAR Data


Abstract

1. Introduction
2. Materials and Methods
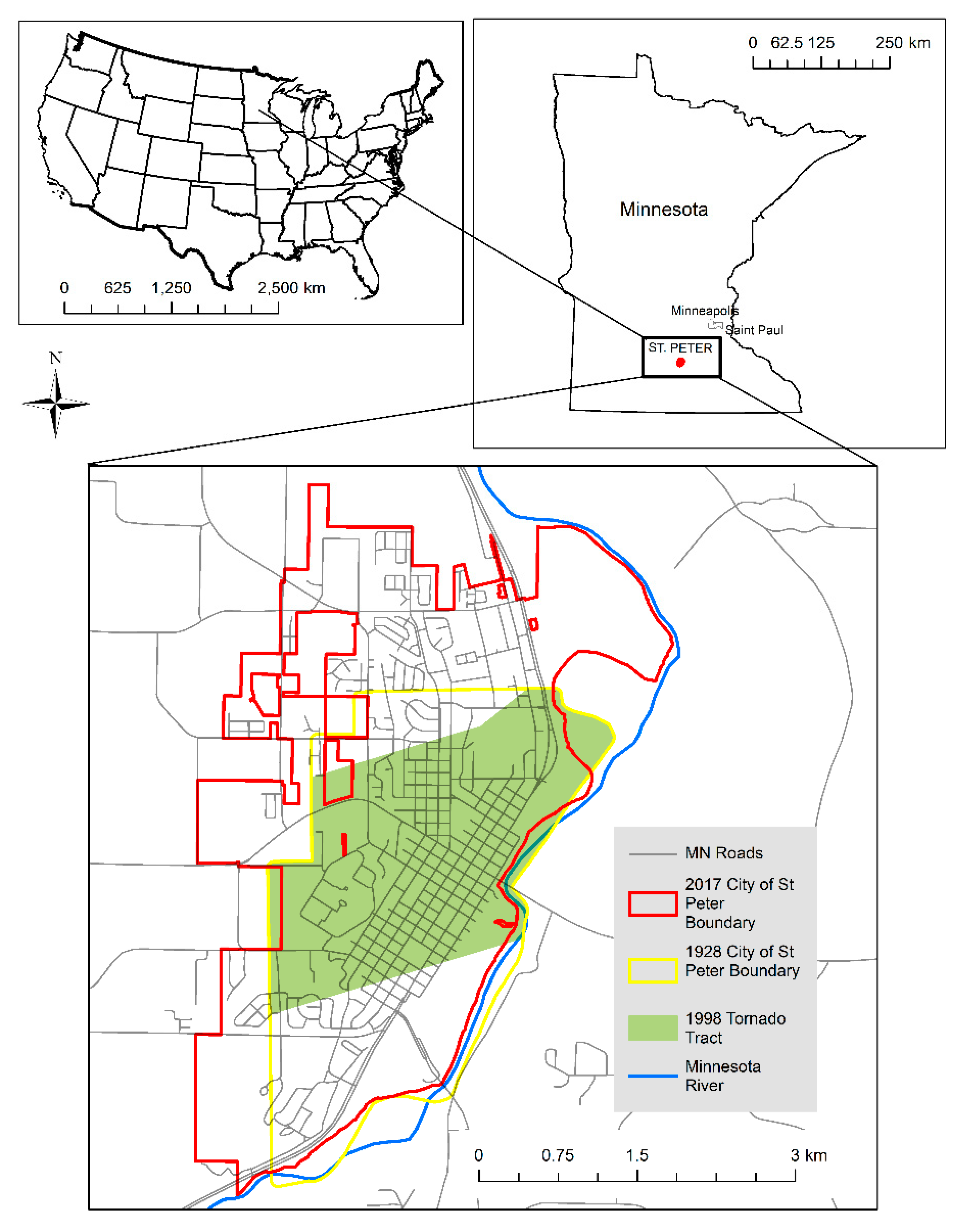
2.1. Study Site
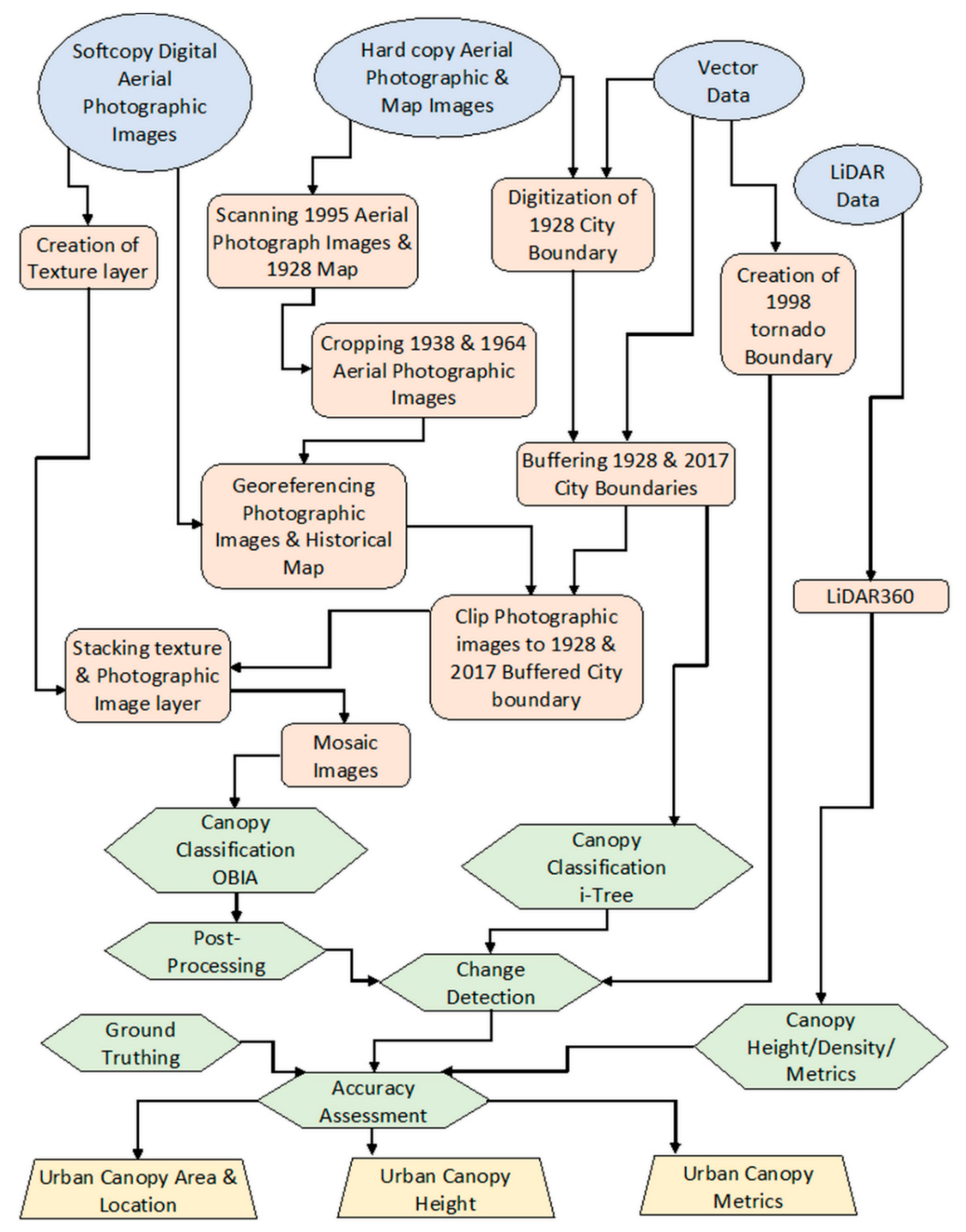
2.2. Data and Preprocessing
2.3. OBIA Urban Forest Canopy Analysis and Change Detection
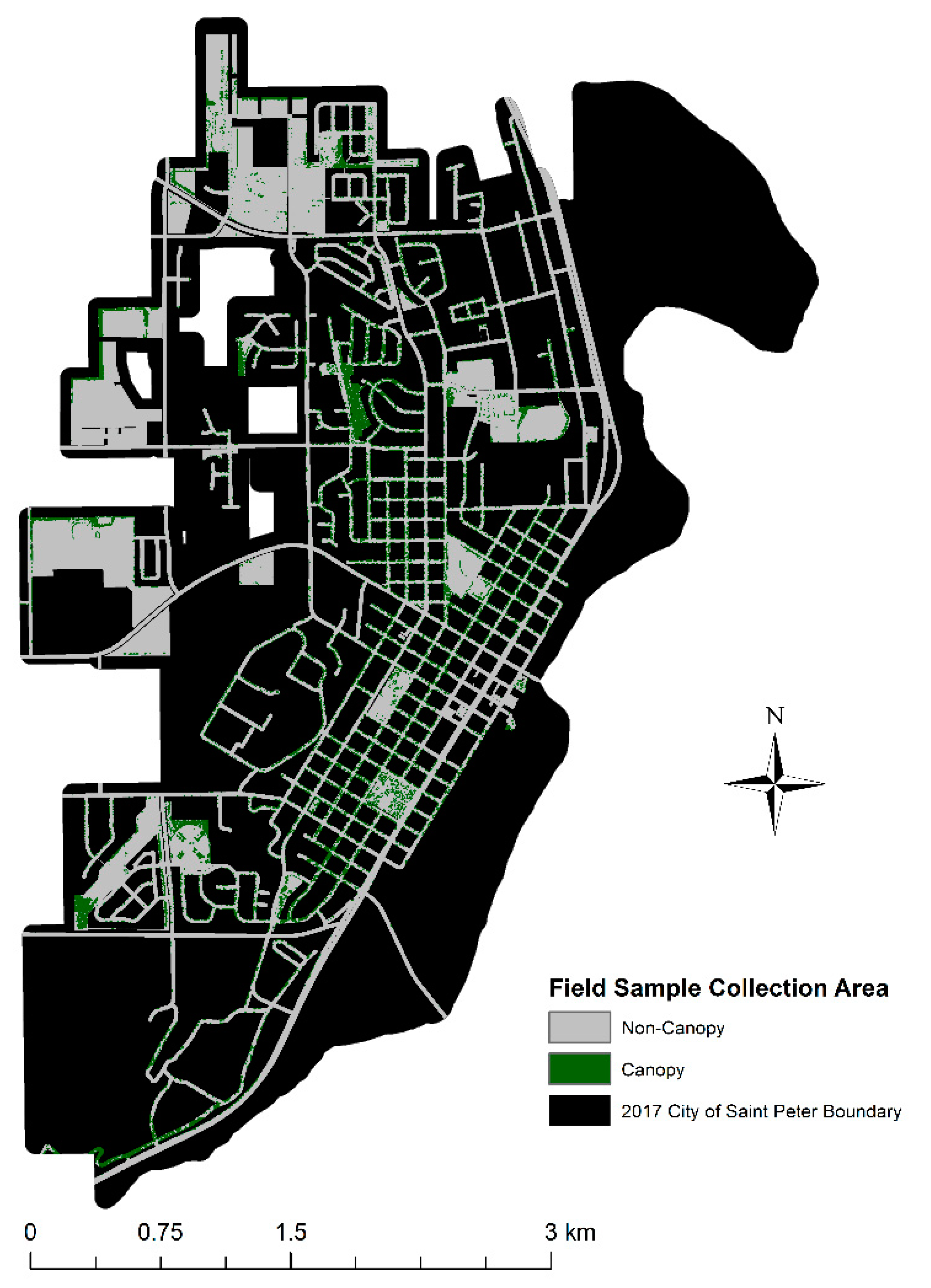
2.4. Accuracy Assessment of Urban Forest Canopy cover Extracted by OBIA
2.5. Urban Forest Canopy Cover Assessment Using i-Tree Canopy
2.6. Urban Forest Metrics Detection Using LiDAR
3. Results
3.1. Accuracy Assessment of OBIA and Stratified Random Sampling Results
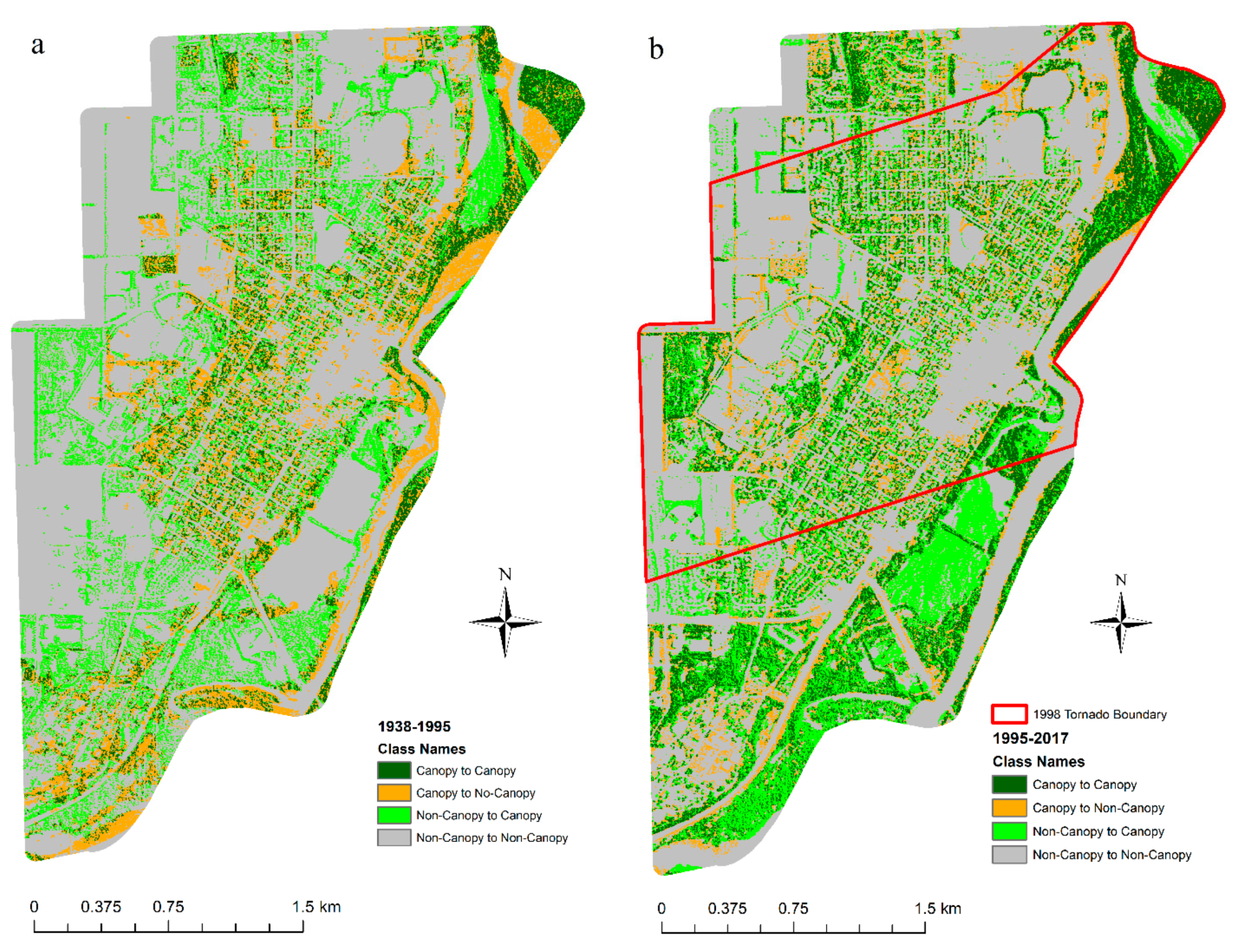
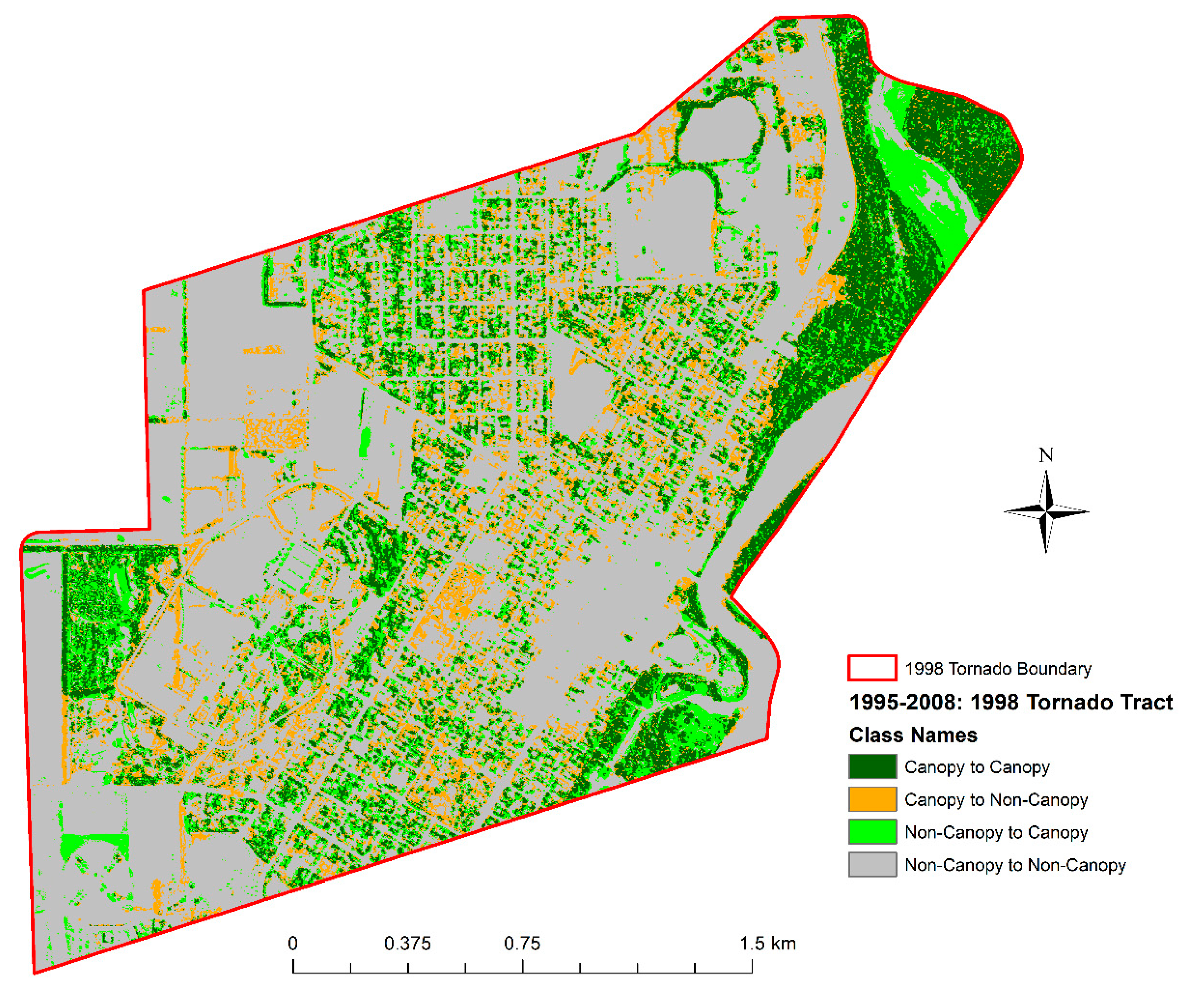
3.2. Trend of Urban Forestry Canopy Change and the Impacts of the 1998 Tornado and Tree Diseases
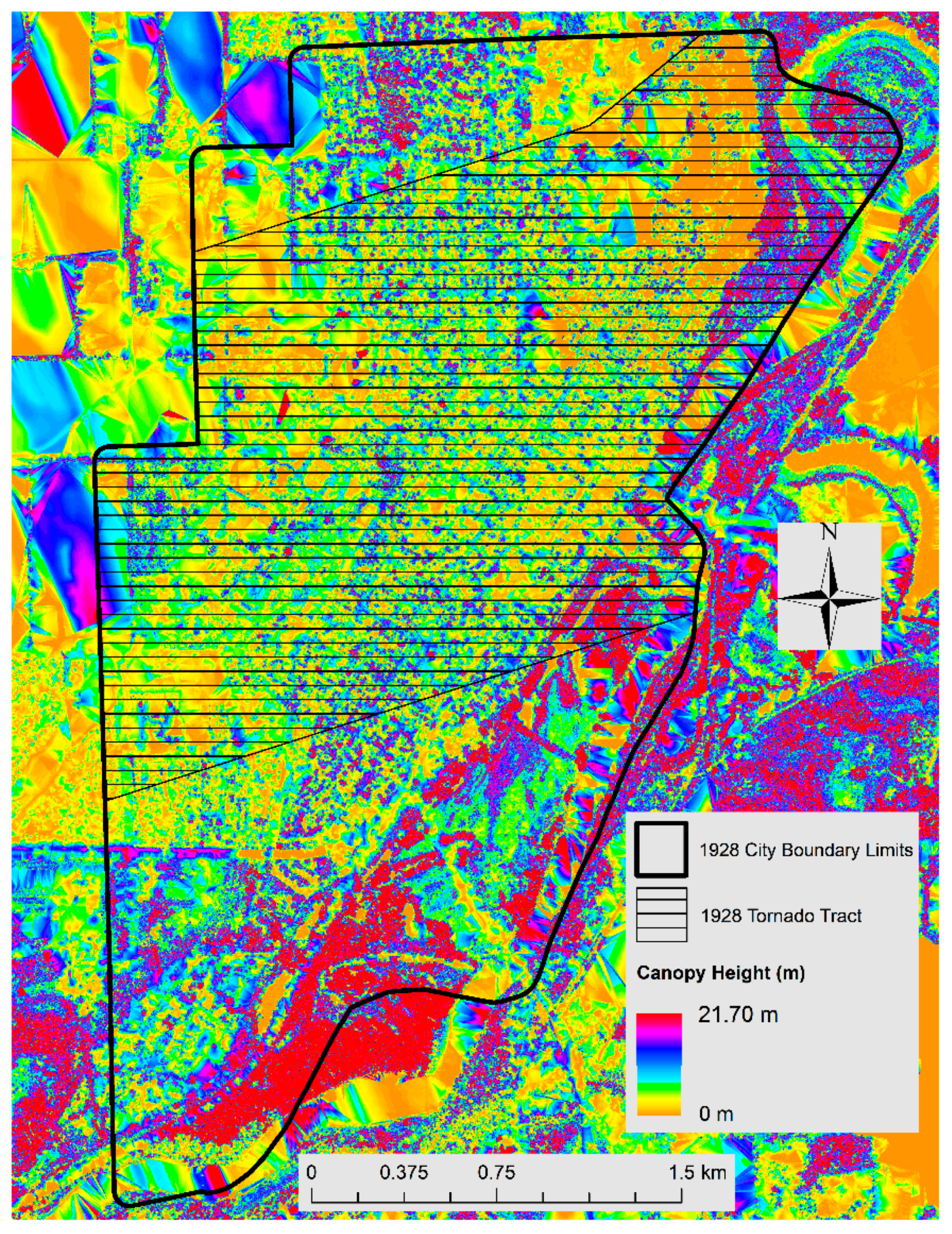
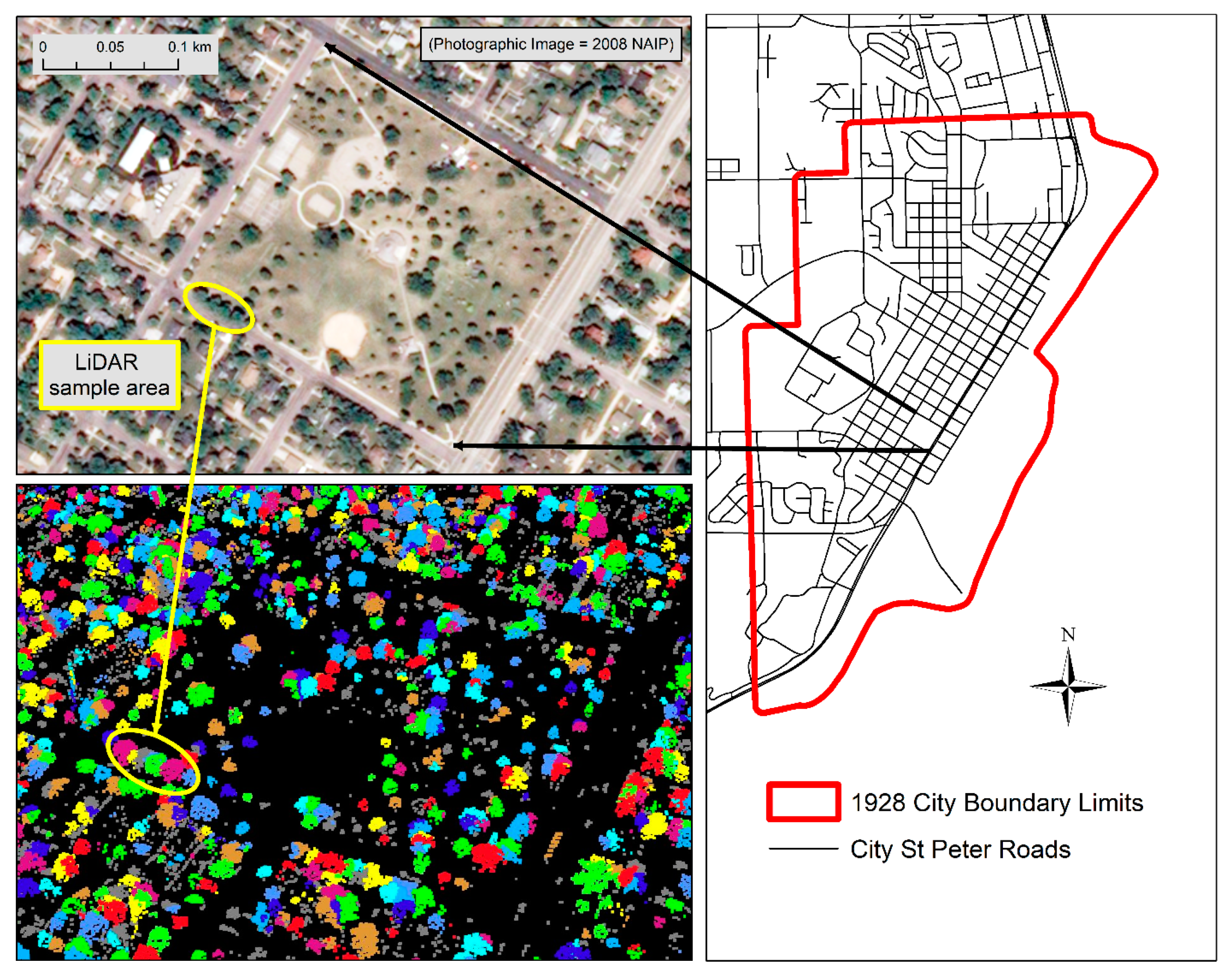
3.3. Urban Forest Canopy Density, Height Assessment and Individual Tree Metrics using LiDAR
4. Discussion
4.1. Comparision of the Urban Canopy Cover Assessment Methods and Factors of Urban Canopy Cover Changes
4.2. Limitations and Potentials of Canopy Metrics Extraction using LiDAR Data Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Grant, S. The Right Tree in the Right Place: Using GIS to Maximize the Net Benefits from Urban Forests, in Physical Geography and Ecosystem Science. Master’s Thesis, Lund University, Lund, Sweden, 2015; p. 63. [Google Scholar]
- Wright, J.; Lillesand, T.M.; Kiefer, R.W. Remote Sensing and Image Interpretation. Geogr. J. 1980, 146, 448. [Google Scholar] [CrossRef]
- Ward, K.T.; Johnson, G.R. Geospatial methods provide timely and comprehensive urban forest information. Urban For. Urban Green. 2007, 6, 15–22. [Google Scholar] [CrossRef]
- Hawthorne, T.L.; Elmore, V.; Strong, A.; Bennett-Martin, P.; Finnie, J.; Parkman, J.; Harris, T.; Singh, J.; Edwards, L.; Reed, P. Mapping non-native invasive species and accessibility in an urban forest: A case study of participatory mapping and citizen science in Atlanta, Georgia. Appl. Geogr. 2015, 56, 187–198. [Google Scholar] [CrossRef]
- Nowak, D.J.; Rowntree, R.A.; McPherson, E.; Sisinni, S.M.; Kerkmann, E.R.; Stevens, J.C. Measuring and analyzing urban tree cover. Landsc. Urban Plan. 1996, 36, 49–57. [Google Scholar] [CrossRef]
- Thenkabail, A.; Lyon, P.; Huete, J. Hyperspectral Remote Sensing of Vegetation; Hyperspectral Remote Sensing of Vegetation; CRC Press: Boca Raton, FL, USA, 2016; p. 705. [Google Scholar]
- Voss, M.; Sugumaran, R. seasonal effect on tree species classification in an urban environment using hyperspectral data, LiDAR, and an object-oriented approach. Sensors 2008, 8, 3020–3036. [Google Scholar] [CrossRef]
- Knight, J.; Host, T.; Rampi, L. 2015 Urban Tree Canopy Assessment Twin Cities Metropolitan Area; Department of Forest Resources, University of Minnesota: St. Paul, MN, USA, 2016; pp. 1–15. [Google Scholar]
- Hovi, A.; Korhonen, L.; Vauhkonen, J.; Korpela, I. LiDAR waveform features for tree species classification and their sensitivity to tree- and acquisition related parameters. Remote Sens. Environ. 2016, 173, 224–237. [Google Scholar] [CrossRef]
- Sumnall, M.J.; Hill, R.A.; Hinsley, S.A. Comparison of small-footprint discrete return and full waveform airborne lidar data for estimating multiple forest variables. Remote Sens. Environ. 2016, 173, 214–223. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M. Tree species classification and estimation of stem volume and DBH based on single tree extraction by exploiting airborne full-waveform LiDAR data. Remote Sens. Environ. 2012, 123, 368–380. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, Y.; Qiu, F. Individual Tree Segmentation from LiDAR Point Clouds for Urban Forest Inventory. Remote Sens. 2015, 7, 7892–7913. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual tree crown methods for 3D data from remote sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef]
- Shrestha, R.; Wynne, R. Estimating Biophysical Parameters of Individual Trees in an Urban Environment Using Small Footprint Discrete-Return Imaging Lidar. Remote Sens. 2012, 4, 484–508. [Google Scholar] [CrossRef]
- Plowright, A.A.; Coops, N.C.; Eskelson, B.N.; Sheppard, S.R.; Aven, N.W. Assessing urban tree condition using airborne light detection and ranging. Urban For. Urban Green. 2016, 19, 140–150. [Google Scholar] [CrossRef]
- Song, Y.; Imanishi, J.; Sasaki, T.; Ioki, K.; Morimoto, Y. Estimation of broad-leaved canopy growth in the urban forested area using multi-temporal airborne LiDAR datasets. Urban For. Urban Green. 2016, 16, 142–149. [Google Scholar] [CrossRef]
- Fujita, T.T. Proposed Characterization of Tornadoes and Hurricanes by Area and Intensity; Satellite and Mesometeorology Research Project, Department of the Geophysical Sciences, The University of Chicago: Chicago, IL, USA, 1971; pp. 1–46. [Google Scholar]
- Burgess, D.; Ortega, K.; Stumpf, G.; Garfield, G.; Karstens, C.; Meyer, T.; Smith, B.; Speheger, D.; LaDue, J.; Smith, R.; et al. 20 May 2013 Moore, Oklahoma, Tornado: Damage Survey and Analysis. Weather. Forecast. 2014, 29, 1229–1237. [Google Scholar] [CrossRef]
- Bloniarz, D.V.; Brooks, R.T. Preliminary Assessment of the Tornado Effects on Residential Street Canopy Cover, Temperature, and Humidity; USDA Forest Service, Northern Research Station: Madison, WI, USA, 2011; p. 6.
- Karstens, C.D.; Gallus, W.A.; Lee, B.D.; Finley, C.A. Analysis of tornado-induced tree fall using aerial photography from the Joplin, Missouri, and Tuscaloosa–Birmingham, Alabama, Tornadoes of 2011. J. Appl. Meteorol. Clim. 2013, 52, 1049–1068. [Google Scholar] [CrossRef]
- Yuan, M.; Dickens-Micozzi, M.; Magsig, M.A. Analysis of Tornado Damage Tracks from the 3 May Tornado Outbreak Using Multispectral Satellite Imagery. Weather. Forecast. 2002, 17, 382–398. [Google Scholar] [CrossRef]
- Gokaraju, B.; Turlapaty, A.C.; Doss, D.A.; King, R.L.; Younan, N.H. Change detection analysis of tornado disaster using conditional copulas and Data Fusion for cost-effective disaster management. In Proceedings of the 2015 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 13–15 October 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Kingfield, D.; De Beurs, K.M. Landsat identification of tornado damage by land cover and an evaluation of damage recovery in forests. J. Appl. Meteorol. Clim. 2017, 56, 965–987. [Google Scholar] [CrossRef]
- Mercader, R.; Siegert, N.W.; Liebhold, A.M.; McCullough, D.G. Dispersal of the emerald ash borer, Agrilus planipennis, in newly-colonized sites. Agric. For. Èntomol. 2009, 11, 421–424. [Google Scholar] [CrossRef]
- Mercader, R.; Siegert, N.W.; Liebhold, A.M.; McCullough, D.G. Simulating the effectiveness of three potential management options to slow the spread of emerald ash borer (Agrilus planipennis) populations in localized outlier sites. Can. J. For. Res. 2011, 41, 254–264. [Google Scholar] [CrossRef]
- McCullough, D.G.; Mercader, R. Evaluation of potential strategies to SLow Ash Mortality (SLAM) caused by emerald ash borer (Agrilus planipennis): SLAM in an urban forest. Int. J. Pest Manag. 2012, 58, 9–23. [Google Scholar] [CrossRef]
- Mullen, K.; Yuan, F.; Mitchell, M. The Mountain pine beetle epidemic in the Black Hills, South Dakota: The consequences of long term fire policy, climate change and the use of remote sensing to enhance mitigation. J. Geogr. Geol. 2018, 10, 69. [Google Scholar] [CrossRef]
- Moskal, L.M.; Styers, D.M.; Halabisky, M. monitoring urban tree cover using object-based image analysis and public domain remotely sensed data. Remote Sens. 2011, 3, 2243–2262. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.M.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Li, X.; Shao, G. Object-based land-cover mapping with high resolution aerial photography at a county scale in Midwestern USA. Remote. Sens. 2014, 6, 11372–11390. [Google Scholar] [CrossRef]
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef]
- Meneguzzo, D.M.; Liknes, G.C.; Nelson, M.D. Mapping trees outside forests using high-resolution aerial imagery: A comparison of pixel- and object-based classification approaches. Environ. Monit. Assess. 2012, 185, 6261–6275. [Google Scholar] [CrossRef]
- Pu, R.; Landry, S.; Yu, Q. Assessing the potential of multi-seasonal high resolution Pléiades satellite imagery for mapping urban tree species. Int. J. Appl. Earth Obs. 2018, 71, 144–158. [Google Scholar] [CrossRef]
- Walker, J.S.; Briggs, J.M. An Object-oriented Approach to Urban Forest Mapping in Phoenix. Photogramm. Eng. Remote Sens. 2007, 73, 577–583. [Google Scholar] [CrossRef]
- Hay, G.; Castilla, G. Geographic Object-Based Image Analysis (GEOBIA): A New Name for a New Discipline; Springer Science and Business Media: Berlin, Germany, 2008; pp. 75–89. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Nowak, D.J.; Hoehn, R.E.; Bodine, A.R.; Greenfield, E.J.; O’Neil-Dunne, J. Urban forest structure, ecosystem services and change in Syracuse, NY. Urban Ecosyst. 2013, 19, 1455–1477. [Google Scholar] [CrossRef]
- Strunk, J.; Mills, J.R.; Ries, P.D.; Temesgen, H.; Jeroue, L. An urban forest inventory and analysis investigation in Oregon and Washington. Urban For. Urban Green. 2016, 18, 100–109. [Google Scholar] [CrossRef]
- Bodnaruk, E.; Kroll, C.; Yang, Y.; Hirabayashi, S.; Nowak, D.; Endreny, T. Where to plant urban trees? A spatially explicit methodology to explore ecosystem service tradeoffs. Landsc. Urban Plan. 2017, 157, 457–467. [Google Scholar] [CrossRef]
- City of Saint Peter Statistics. Available online: https://www.saintpetermn.gov (accessed on 19 April 2017).
- City of Saint Peter. Species Distibution of Public Trees; Saint Peter, Ed.; City of Saint Peter: ST PETER, MN, USA, 2018. Available online: https://www.saintpetermn.gov/230/Environmental-Services-Forestry (accessed on 2 June 2020).
- Metadata: LiDAR Elevation, Minnesota River Basin, Southwest Minnesota. 2010. Available online: Ftp://ftp.gisdata.mn.gov/pub/gdrs/data/pub/us_mn_State_mngeo/elev_lidar_swmn2010/metadata/metadata.html (accessed on 5 April 2018).
- Minnesota Department of Transportation. MnDOT Historic Bridge Management Plan (MnDOT Bridge 4930); MnDOT, Ed.; MnDOT: St Paul, MN, USA, December 2018; p. 36.
- ESRI. ArcGIS, version 10.5, Help; ESRI: Redlands, CA, USA, 2019. [Google Scholar]
- National Oceanic and Atmospheric Administration. Tornado Shapefile; NOAA, Ed.; NOAA: Washington, DC, USA, 2017.
- Yuan, F. Land-cover change and environmental impact analysis in the Greater Mankato area of Minnesota using remote sensing and GIS modelling. Int. J. Remote. Sens. 2007, 29, 1169–1184. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 610–621. [Google Scholar] [CrossRef]
- Ryherd, S.; Woodcock, C. Combining spectral and texture data in the segmentation of remotely sensed images. Photogramm. Eng. Remote Sens. 1996, 62, 181–194. [Google Scholar]
- Nagel, P.; Cook, B.J.; Yuan, F. High Spatial-resolution land cover classification and wetland mapping over large areas using integrated geospatial technologies. Int. J. Remote Sens. Appl. 2014, 4, 71. [Google Scholar] [CrossRef]
- Opitz, D.; Blundell, S. Object recognition and image segmentation: The Feature Analyst® approach. In GIS for Health and the Environment; Springer: Berlin/Heidelberg, Germany, 2008; pp. 153–167. [Google Scholar]
- Overwatch Systems Ltd. Feature Analyst® 5.1.x for ArcGIS® Tutorial, version 5.1; Overwatch Systems Ltd.: Austin, TX, USA, 2013; pp. 1–158. [Google Scholar]
- Qiu, X.; Wu, S.-S.; Miao, X. Incorporating road and parcel data for object-based classification of detailed urban land covers from NAIP images. GISci. Remote Sens. 2014, 51, 498–520. [Google Scholar] [CrossRef]
- Nagel, P.; Yuan, F.; Philipp, N.; Fei, Y. High-resolution land cover and impervious surface classifications in the twin cities metropolitan area with NAIP Imagery. Photogramm. Eng. Remote Sens. 2016, 82, 63–71. [Google Scholar] [CrossRef]
- Yuan, F.; Arnold, S.; Brand, A.; Klein, J.; Schmidt, M.; Moseman, E.; Michels-Boyce, M.; Lopez, J.J. Forestation in Puerto Rico, 1970s to present. J. Geogr. Geol. 2017, 9, 30. [Google Scholar] [CrossRef][Green Version]
- Matrix Analysis. Available online: https://hexagongeospatial.fluidtopics.net/reader/uOKHREQkd_XR9iPo9Y_ljw/FHwHTMam8EWJP5P8tfpjig (accessed on 27 March 2019).
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- Zhou, W.; Troy, A. An object-oriented approach for analysing and characterizing urban landscape at the parcel level. Int. J. Remote. Sens. 2008, 29, 3119–3135. [Google Scholar] [CrossRef]
- About i-Tree. Available online: https://www.itreetools.org/about.php (accessed on 16 March 2018).
- i-Tree: Climate Change Resource Center. Available online: https://www.fs.usda.gov/ccrc/tools/i-tree (accessed on 16 March 2018).
- USDA. i-Tree Canopy; USDA Forest Service: Washington, DC, USA, 2019.
- i-Tree Canopy Technical Notes. Available online: https://www.itreetools.org (accessed on 29 March 2019).
- GreenValley International Ltd. LiDAR360 User Guide; GreenValley International Ltd.: Berkeley, CA, USA, 2019. [Google Scholar]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Chen, Q.; Baldocchi, D.D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef]
- Guo, Q.; Su, Y.; Guo, Q. Comparison of canopy cover estimations from airborne LiDAR, aerial imagery, and satellite imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4225–4236. [Google Scholar] [CrossRef]
- Blackman, R. Long-Term Urban Forest Cover Change Detection with Object-Based Image Analysis and Random Point Based Assessment, in Geography. Master’s Thesis, Minnesota State University, Mankato, MN, USA, 2019; p. 121. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Source | Image Date | File Type | Coordinate System | Resolution/Scale |
|---|---|---|---|---|---|
| Hardcopy Historical Engineering Map | City of St Peter, Engineers Office, MN | 1928 | .tif | NAD_1983_HARN_Adj_MN_Nicollet_Feet | 600 DPI/1:500 |
| Hardcopy Historical Aerial Photograph | City of St Peter, Engineers Office, MN | July–August ^ 1995 | 3-band, natural color/.tif | NAD_1983_HARN_Adj_MN_Nicollet_Feet | 600 DPI/1:600/0.93 m |
| Digital Vertical Aerial Photographs | Minnesota Historical Aerial Photographs Online (MHAPO) | July 1938 | Panchromatic/.jpg | NAD_1983_HARN_Adj_MN_Nicollet_Feet | 600–1200 DPI/1:20,000/0.93 m |
| July 1951 | Panchromatic/.jpg | NAD_1983_HARN_Adj_MN_Nicollet_Feet | 600–1200 DPI/1:20,000 */0.93 m | ||
| July–August 1964 | Panchromatic/.jpg | NAD_1983_HARN_Adj_MN_Nicollet_Feet | 600–1200 DPI/1:20,000/0.93 m | ||
| Digital NAIP Ortho-images | United States Geological Survey (USGS) | July 2008 | 4-band; color near infrared/Geo Tiff | NAD_1983_UTM_15N | 0.93 m |
| August 2017 | 4-Band; color near infrared/Geo Tiff | NAD_1983_ UTM_ 15N | 0.93 m | ||
| i-Tree Canopy Ortho-images | United Department of Agriculture (USDA) Farm Service Agency | 2008–2019 | True-color composite image | WGS 84 Web Mercator | 0.93 m |
| Data Type | Description | Source | Date | File Type | Coordinate System | Resolution/Scale |
|---|---|---|---|---|---|---|
| Vector Data | City of St Peter Roads | Nicollet County, MN | 2017 | .shp/Line | NAD_1983_HARN_Adj_MN_Nicollet_Feet | N/A |
| Nicollet County Tax Parcel data | Nicollet County, MN | 2017 | shp/Polygon | NAD_1983_HARN_Adj_MN_Nicollet_Feet | N/A | |
| Nicollet County City Limits | Nicollet County, MN | 2017 | .shp/Polygon | NAD_1983_HARN_Adj_MN_Nicollet_Feet | N/A | |
| Tornado Tracts | National Oceanographic and Atmospheric Administration (NOAA) | 1950–2017 | .shp/Line | GCS_North_American_ 1983 | N/A | |
| LiDAR Data * | LiDAR Point Cloud | Minnesota Department of Natural Resources (MNDNR) | 2010 | .laz | NAD_1983_UTM_Zone_15N | Resolution/Nominal Pulse Spacing (m) = 1.25 |
| Image Type | Year Of Image (Compass Location) | Reference Data: Aerial Photographs | Total Root-Mean-Square Error (RMSE) (m) |
|---|---|---|---|
| Aerial Photograph | 1995 | 2017 NE, NW and SW | 6.20 |
| 1964 (SW) | 2017 NE, NW and SW | 11.25 | |
| 1964 (SE) | 2017 NE, NW and SW | 3.06 | |
| 1964 (N) | 2006 NE/2017 NE, NW and SW | 22.19 | |
| 1951 (N) | 2006 NW and SW | N/A | |
| 1951 (S) | 2006 NW and SW/1951 N | 83.37 | |
| 1938 (NE) | 1951 S and N | 6.78 | |
| 1938 (NW) | 1938 NE/1951 S and N | 1.40 | |
| 1938 (S) | 1938 NE and NW/1951 S | 4.22 | |
| Engineering Map | 1928 | 1951 S and N | 113.60 |
| Description | Areas | |
|---|---|---|
| Urban Forest | Tree and shrub canopy | Boulevards, gardens, naturalized areas |
| Water | Rivers, ponds, storm water basins, swimming pools, etc. | MN River, gardens, city property |
| Impervious Surface | Roads, buildings, parking lots, etc. | Urban and rural |
| Grass/Soil | Agricultural land, gardens, green spaces, fields, gravel roads, etc. | Boulevards, gardens, naturalized areas, parks |
| Shadow/Other | Buildings, trees, bridges, etc. | Urban and rural |
| Year | Overall Classification Accuracy (%) | Overall Kappa Statistics | Canopy Producer’s Accuracy (%) | Canopy User’s Accuracy (%) |
|---|---|---|---|---|
| 1938 | 94.00 | 0.87 | 96.43 | 88.52 |
| 1951 | 92.67 | 0.84 | 96.15 | 84.75 |
| 1964 | 94.67 | 0.89 | 96.49 | 90.16 |
| 1995 | 89.33 | 0.78 | 90.32 | 84.85 |
| 2008 | 96.00 | 0.92 | 97.06 | 94.29 |
| 2017 (1928 boundary) | 90.67 | 0.81 | 86.76 | 92.19 |
| 2017 (2017 boundary) | 94.67 | 0.89 | 93.65 | 93.65 |
| 2017 (Ground Truth) | 92.67 | 0.82 | 89.80 | 88.00 |
| Year (Boundary) | Canopy (ha) | % Area | +/−SE | % Area +SE | % Area−SE | +SE (ha) | −SE (ha) |
|---|---|---|---|---|---|---|---|
| 2008 (1928) | 285.20 | 30.30 | 1.45 | 31.75 | 28.85 | 298.85 | 671.02 |
| 2019 (1928) | 346.38 | 36.80 | 1.53 | 38.33 | 35.27 | 360.78 | 331.98 |
| 2019 (2017) | 518.36 | 30.40 | 1.46 | 31.86 | 28.94 | 543.25 | 493.47 |
| Canopy (ha) | % Area | Non-Canopy (ha) | % Area | Sum of All (ha) | |
|---|---|---|---|---|---|
| 2017 (2017 Boundary) | 568.98 | 33.37 | 1136.13 | 66.63 | 1705.11 |
| 2017 (1928 Boundary) | 332.30 | 35.30 | 608.94 | 64.70 | 941.24 |
| 2008 (1928 Boundary) | 334.47 | 35.53 | 606.78 | 64.47 | 941.25 |
| 1995 (1928 Boundary) | 244.47 | 25.98 | 696.48 | 74.02 | 940.95 |
| 1964 (1928 Boundary) | 213.61 | 22.69 | 727.64 | 77.31 | 941.25 |
| 1951 (1928 Boundary) | 169.47 | 18.00 | 771.78 | 82.00 | 941.25 |
| 1938 (1928 Boundary) | 194.67 | 20.68 | 746.58 | 79.32 | 941.25 |
| 2008 (1928 and 1998 Tornado Boundary) | 155.74 | 27.62 | 408.17 | 72.38 | 563.91 |
| 1995 (1928 and 1998 Tornado Boundary) | 149.11 | 26.44 | 414.80 | 73.56 | 563.91 |
| Segmentation Process | Tree ID | Tree Location X | Tree Location Y | Tree Height (m) | Crown Diameter (m) | Crown Area (m2) | Crown Volume (m3) |
|---|---|---|---|---|---|---|---|
| CHM | 212174 | 423011.80 | 4907701.84 | 12.60 | 25.76 | 521.28 | N/A |
| PC | 26684 | 423013.49 | 4907699.86 | 14.44 | 38.98 | 1193.32 | 5790.00 |
| CHM | 212242 | 423019.00 | 4907693.44 | 11.46 | 19.10 | 286.56 | N/A |
| PC | 26706 | 423023.39 | 4907692.63 | 13.38 | 12.11 | 115.16 | 571.67 |
| CHM | 212267 | 423027.40 | 4907689.84 | 12.41 | 13.05 | 133.99 | N/A |
| PC | 26670 | 423029.57 | 4907687.71 | 14.88 | 14.81 | 172.29 | 849.70 |
| CHM | 212285 | 423033.40 | 4907687.44 | 12.44 | 11.73 | 108.00 | N/A |
| PC | 26695 | 423040.18 | 4907683.88 | 13.68 | 31.56 | 782.18 | 4682.06 |
| CHM | 212299 | 423029.80 | 4907685.04 | 11.71 | 9.08 | 64.80 | N/A |
| PC | No Value | No Value | No Value | No Value | No Value | No Value | No Value |
| CHM | 212324 | 423037.00 | 4907682.64 | 11.98 | 19.15 | 288.00 | N/A |
| PC | No Value | No Value | No Value | No Value | No Value | No Value | No Value |
| CHM | 212355 | 423049.00 | 4907680.24 | 8.62 | 11.57 | 105.12 | N/A |
| PC | No Value | No Value | No Value | No Value | No Value | No Value | No Value |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Blackman, R.; Yuan, F. Detecting Long-Term Urban Forest Cover Change and Impacts of Natural Disasters Using High-Resolution Aerial Images and LiDAR Data. Remote Sens. 2020, 12, 1820. https://doi.org/10.3390/rs12111820
Blackman R, Yuan F. Detecting Long-Term Urban Forest Cover Change and Impacts of Natural Disasters Using High-Resolution Aerial Images and LiDAR Data. Remote Sensing. 2020; 12(11):1820. https://doi.org/10.3390/rs12111820
Chicago/Turabian StyleBlackman, Raoul, and Fei Yuan. 2020. "Detecting Long-Term Urban Forest Cover Change and Impacts of Natural Disasters Using High-Resolution Aerial Images and LiDAR Data" Remote Sensing 12, no. 11: 1820. https://doi.org/10.3390/rs12111820
APA StyleBlackman, R., & Yuan, F. (2020). Detecting Long-Term Urban Forest Cover Change and Impacts of Natural Disasters Using High-Resolution Aerial Images and LiDAR Data. Remote Sensing, 12(11), 1820. https://doi.org/10.3390/rs12111820