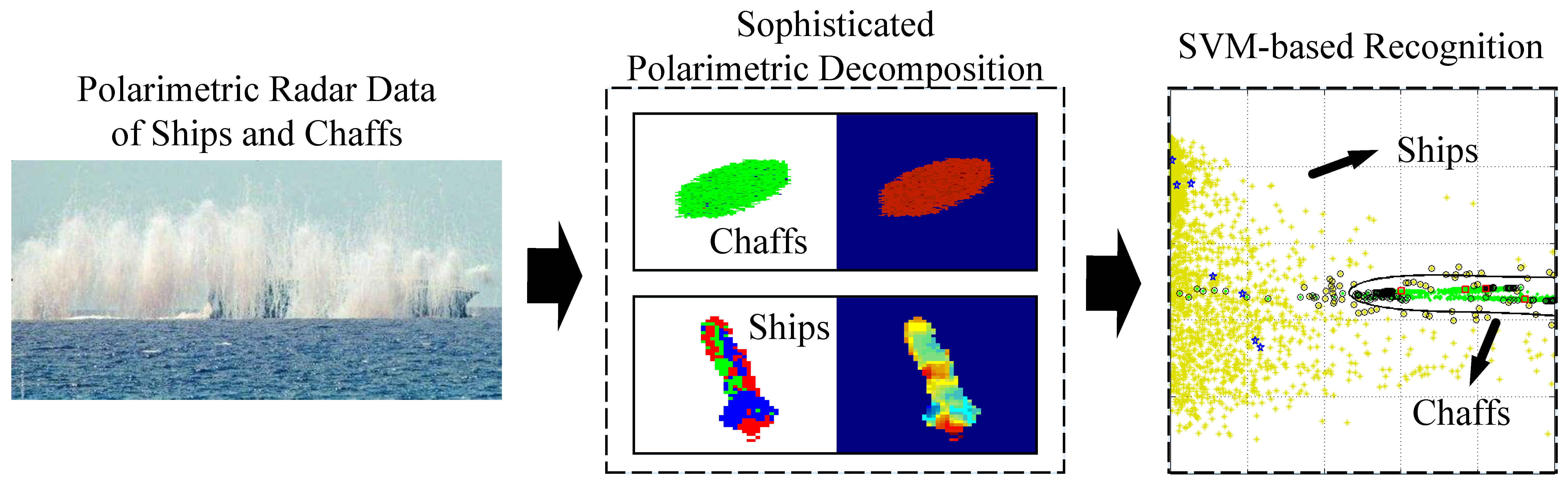
Ship Recognition from Chaff Clouds with Sophisticated Polarimetric Decomposition


 , ,
, ,
Abstract

1. Introduction
2. Methodology
2.1. Sophisticated Scattering Models
2.2. Seven-Component Model-Based Decomposition
2.3. Discrimination Feature Construction
2.4. SVM-Based Ship Recognition
3. Results
3.1. Data Decription
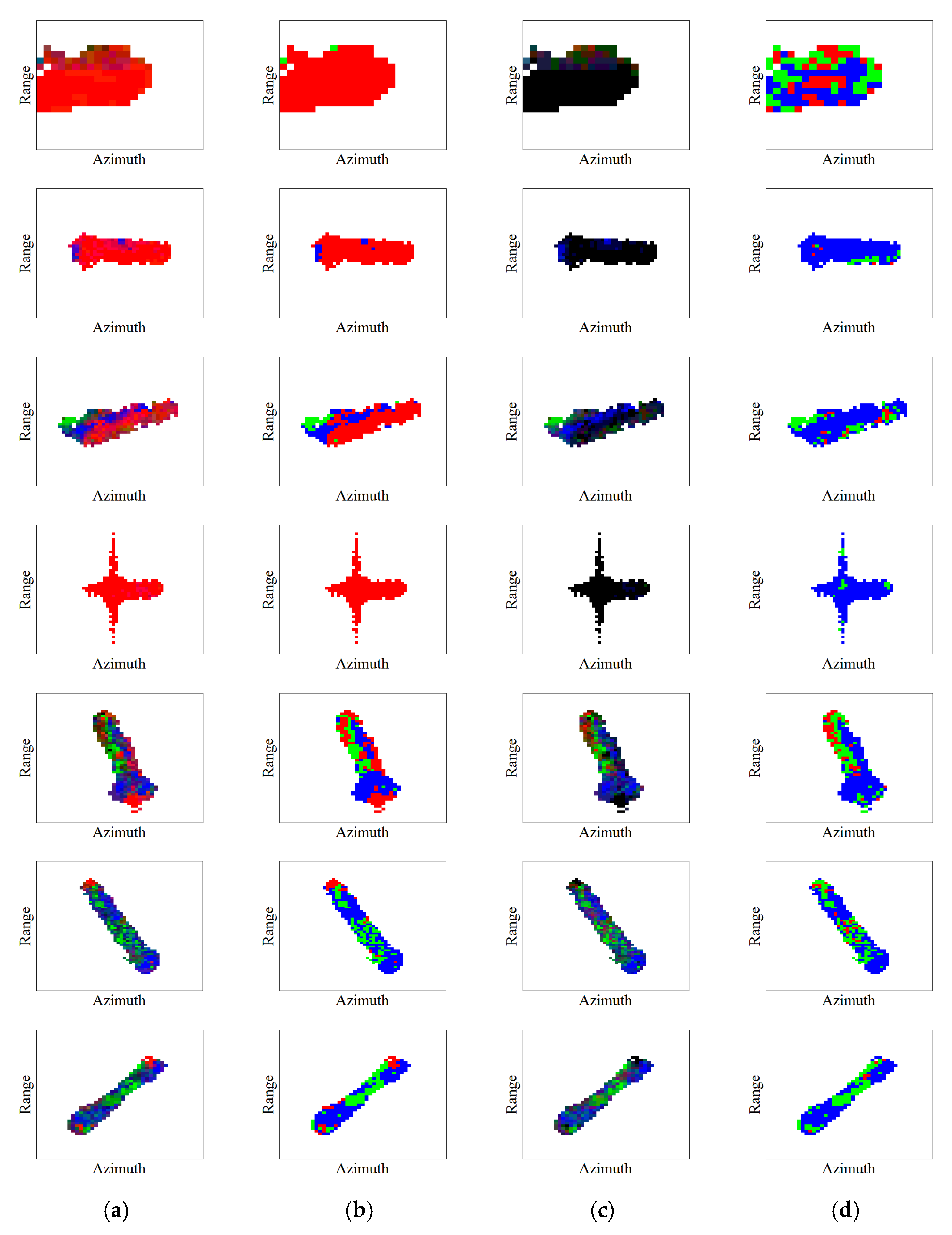
3.2. Decomposition Results
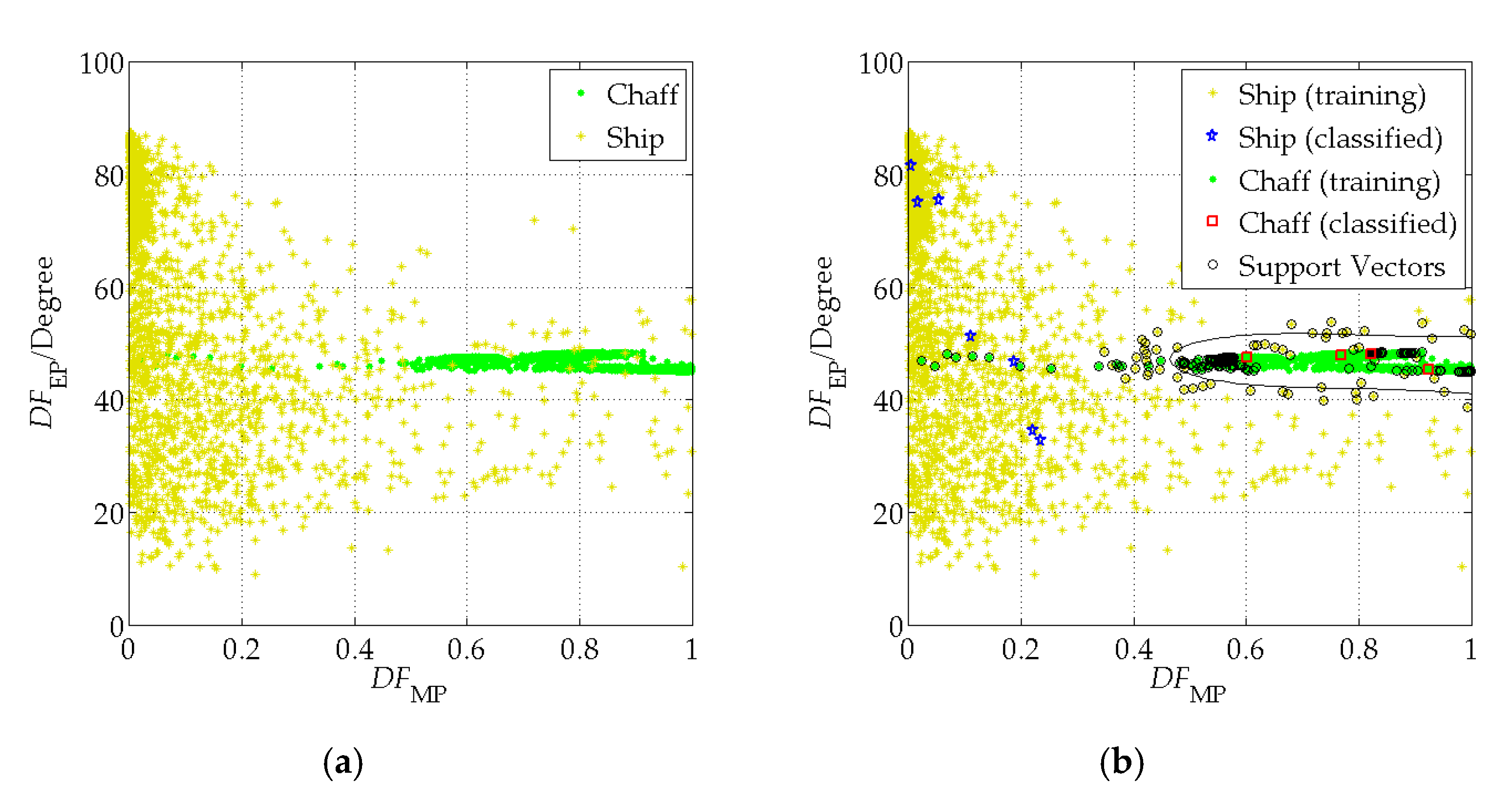
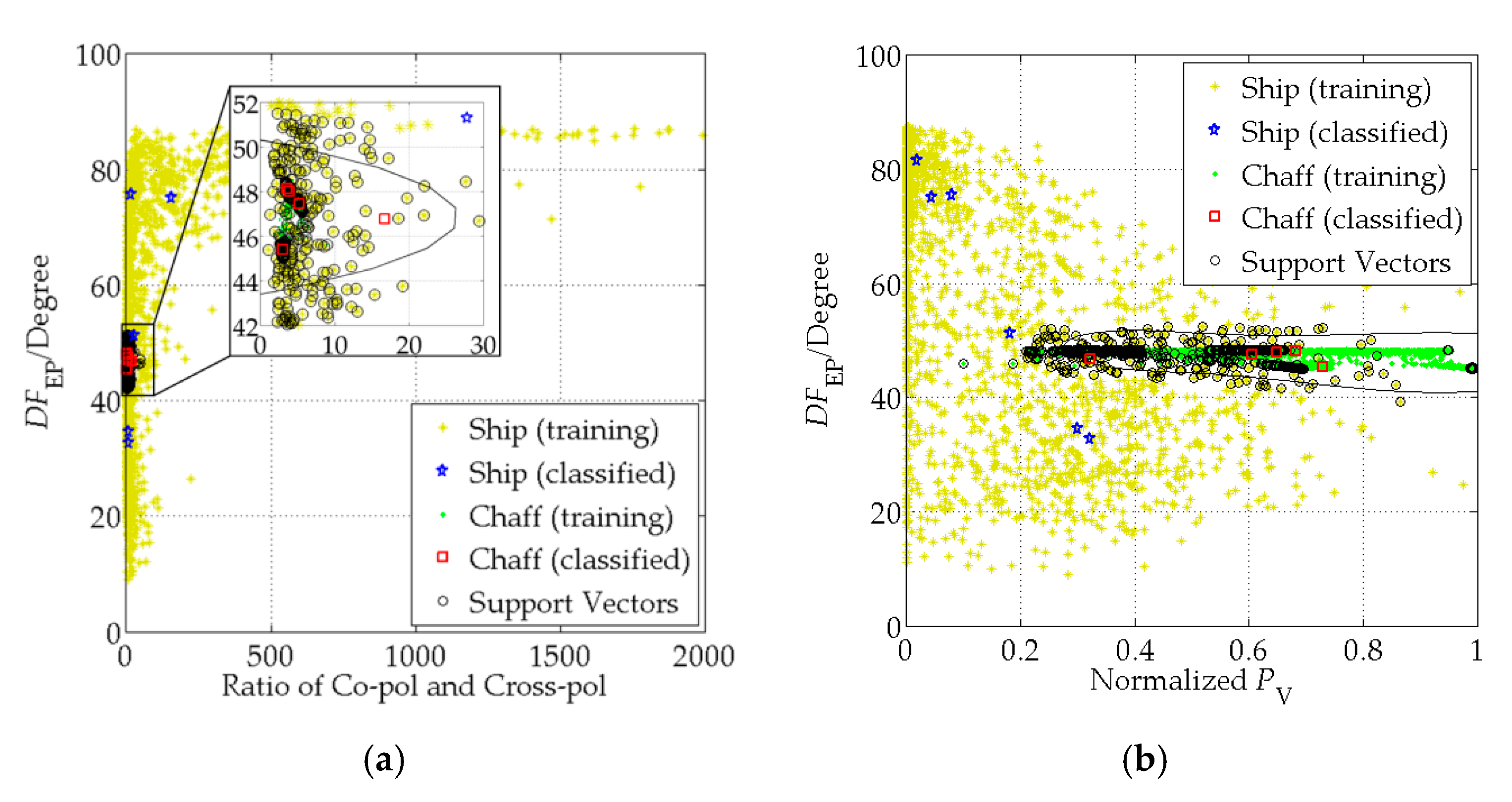
3.3. Ship Recognition Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, J. Principles of Radar Chaff Jamming; National Defense Industry Press: Beijing, China, 2007; pp. 46–108. ISBN 9787118048780. [Google Scholar]
- Marcus, S.W. Dynamics and radar cross section density of chaff clouds. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 93–102. [Google Scholar] [CrossRef]
- Bendayan, M.; Garcia, A. Signal modeling of chaff in naval environment simulation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 3161–3166. [Google Scholar] [CrossRef]
- Seo, D.W.; Lee, J.H.; Lee, H.S. Estimation of incoherent scattered field by multiple scatterers in random media. ETRI J. 2016, 38, 141–148. [Google Scholar] [CrossRef]
- Shao, X.H.; Xue, J.H.; Du, H. Theoretical analysis of polarization recognition between chaff cloud and ship. In Proceedings of the 2007 International Workshop on Anti-Counterfeiting, Security and Identification (ASID), Xiamen, China, 16–18 April 2007; pp. 125–129. [Google Scholar] [CrossRef]
- Shao, X.H.; Du, H.; Xue, J.H. A target recognition method based on non-Linear polarization transformation. In Proceedings of the 2007 International Workshop on Anti-Counterfeiting, Security and Identification (ASID), Xiamen, China, 16–18 April 2007; pp. 157–163. [Google Scholar] [CrossRef]
- Li, X.; Lin, L.S.; Shao, X.H. A target polarization recognition method for radar echoes. In Proceedings of the 2010 International Conference on Microwave and Millimeter Wave Technology, Chengdu, China, 8–11 May 2010; pp. 1644–1647. [Google Scholar] [CrossRef]
- Li, J.L.; Zeng, Y.F.; Shen, X.J.; Xie, H. Modified polarization recognition method for chaff jamming. Radar Sci. Technol. 2015, 13, 350–355. [Google Scholar] [CrossRef]
- Tang, B.; Li, H.M.; Sheng, X.Q. Jamming recognition method based on the full polarisation scattering matrix of chaff clouds. IET Microw. Antennas Propag. 2012, 6, 1451–1460. [Google Scholar] [CrossRef]
- Yang, Y.; Feng, D.-J.; Wang, X.-S.; Xiao, S.-P. Polarisation oblique projection for radar seeker tracking in chaff centroid jamming environment without prior knowledge. IET Radar Sonar Navig. 2014, 8, 1195–1202. [Google Scholar] [CrossRef]
- Cui, G.; Liu, J.; Shi, L.; Ma, J. Identification of chaff interference based on polarization parameter measurement. In Proceedings of the IEEE 13th International Conference on Electronic Measurement & Instruments, Yangzhou, China, 20–22 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Hu, S.; Wu, L.; Zhang, J.; Xu, J. Research on Chaff Jamming Recognition Technology of Anti-ship Missile Based on Radar Target Characteristics. In Proceedings of the IEEE 12th International Conference on Intelligent Computation Technology and Automation, Xiangtan, China, 26–27 October 2019; pp. 222–226. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Four-component scattering model for polarimetric SAR image decomposition. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1699–1706. [Google Scholar] [CrossRef]
- Quan, S.; Xiang, D.; Xiong, B.; Hu, C.; Kuang, G. A Hierarchical Extension of General Four-Component Scattering Power Decomposition. Remote Sens. 2017, 9, 1–23. [Google Scholar] [CrossRef]
- Quan, S.; Xiang, D.; Xiong, B.; Kuang, G. Derivation of the Orientation Parameters in Built-up Areas: With Application to Model-based Decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 4714–4730. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Su, Y. Model-based decomposition with cross scattering for polarimetric SAR urban areas. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2496–2500. [Google Scholar] [CrossRef]
- Quan, S.; Xiong, B.; Xiang, D.; Hu, C.; Kuang, G. Scattering characterization of obliquely oriented buildings from PolSAR data using eigenvalue-related model. Remote Sens. 2019, 5, 1–12. [Google Scholar] [CrossRef]
- Xi, Y.; Lang, H.; Tao, Y.; Huang, L.; Pei, Z. Four-Component Model-Based Decomposition for Ship Targets using PolSAR Data. Remote Sens. 2017, 6, 1–19. [Google Scholar] [CrossRef]
- Sugimoto, M.; Ouchi, K.; Nakamura, Y. On the novel use of model-based decomposition in SAR polarimetry for target detection on the sea. Remote Sens. Lett. 2013, 4, 843–852. [Google Scholar] [CrossRef]
- Singh, G.; Yamaguchi, Y. Model-based six-component scattering matrix power decomposition. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5687–5704. [Google Scholar] [CrossRef]
- Fan, H.; Quan, S.; Dai, D.; Wang, X.; Xiao, S. Seven-Component Model-Based Decomposition for PolSAR Data with Sophisticated Scattering Models. Remote Sens. 2019, 23, 1–19. [Google Scholar] [CrossRef]
- Yajima, Y.; Yamaguchi, Y.; Sato, R.; Yamada, H.; Boerner, W.M. POLSAR image analysis of wetlands using a modified four-component scattering power decomposition. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1667–1673. [Google Scholar] [CrossRef]
- Sato, A.; Yamaguchi, Y.; Singh, G.; Park, S.E. Four-component scattering power decomposition with extended volume scattering model. IEEE Geosci. Remote Sens. Lett. 2011, 9, 166–170. [Google Scholar] [CrossRef]
- Cloude, S.R. Polarisation: Applications in Remote Sensing; Oxford University Press: New York, NY, USA, 2010; pp. 57–65. ISBN 9780191574382. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; Taylor & Francis: Boca Raton, FL, USA, 2009; pp. 85–158. ISBN 9781420054972. [Google Scholar]
- Quan, S.; Xiong, B.; Xiang, D.; Zhao, L.; Zhang, S.; Kuang, G. Eigenvalue-based urban area extraction using polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2018, 11, 458–471. [Google Scholar] [CrossRef]
- Touzi, R. Target Scattering Decomposition in Terms of Roll-Invariant Target Parameters. IEEE Trans. Geosci. Remote Sens. 2007, 45, 73–84. [Google Scholar] [CrossRef]
- Cristianini, N.; Shawe-Taylor, J. An Introduction to Support Vector Machines and Other Kernel-Based Learning Methods; Cambridge University Press: Cambridge, MA, USA, 2000; pp. 198–216. ISBN 0521780195. [Google Scholar]
- Liu, Y.; Xing, S.; Li, Y.; Hou, D.; Wang, X. Jamming recognition method based on the polarisation scattering characteristics of chaff clouds. IET Radar Sonar Navig. 2017, 11, 1689–1699. [Google Scholar] [CrossRef]
- Chen, S.W.; Wang, X.S.; Xiao, S.P.; Sato, M. General polarimetric model-based decomposition for coherency matrix. IEEE Trans. Geosci. Remote Sens. 2013, 52, 1843–1855. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chaff Clouds | Case 1 | Case 2 | Case 3-1 | Case 3-2 |
|---|---|---|---|---|
| Surface scattering | 2.69% | 22.25% | 38.91% | 16.90% |
| Double-bounce scattering | 0.88% | 0.08% | 0.18% | 0.09% |
| Volume scattering | 93.62% | 77.25% | 60.55% | 82.51% |
| Helix scattering | 0.53% | 0.40% | 0.36% | 0.42% |
| Cross scattering | 0.45% | 0.00% | 0.00% | 0.01% |
| ±45° OD scattering | 0.92% | 0.00% | 0.00% | 0.02% |
| ±45° OQW scattering | 0.90% | 0.01% | 0.00% | 0.03% |
| Complex structure scattering | 2.8% | 0.41% | 0.36% | 0.48% |
| Ships | T1 | T2 | T3 | T4 | T5 | T6 | T7 |
|---|---|---|---|---|---|---|---|
| Surface scattering | 4.79% | 12.20% | 30.78% | 3.65% | 30.09% | 41.78% | 40.69% |
| Double-bounce scattering | 83.80% | 85.71% | 55.30% | 95.49% | 32.59% | 12.50% | 12.22% |
| Volume scattering | 5.46% | 1.55% | 7.93% | 0.63% | 23.95% | 30.30% | 33.12% |
| Helix scattering | 2.69% | 0.12% | 2.41% | 0.06% | 7.41% | 6.46% | 9.99% |
| Cross scattering | 0.19% | 0.03% | 0.07% | 0.009% | 1.36% | 0.26% | 0.01% |
| ±45° OD scattering | 1.49% | 0.03% | 1.04% | 0.004% | 2.67% | 4.37% | 2.02% |
| ±45° OQW scattering | 1.19% | 0.03% | 2.03% | 0.008% | 2.80% | 4.11% | 1.71% |
| Complex structure scattering | 5.56% | 0.20% | 5.55% | 0.09% | 14.24% | 15.20% | 13.73% |
| Composite Method | CR | MR | FR | CA |
|---|---|---|---|---|
| The Proposed | 98.80% | 1.20% | 0.25% | 100% |
| RCP + + SVM | 92.27% | 7.73% | 0.00% | 90.90% |
| GPv + + SVM | 95.04% | 4.96% | 0.51% | 90.90% |
| + SVM | 95.10% | 4.90% | 3.57% | 100% |
| + SVM | 94.61% | 5.39% | 3.79% | 90.90% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Quan, S.; Xiang, D.; Wang, W.; Hu, C.; Liu, Y.; Wang, X. Ship Recognition from Chaff Clouds with Sophisticated Polarimetric Decomposition. Remote Sens. 2020, 12, 1813. https://doi.org/10.3390/rs12111813
Li Y, Quan S, Xiang D, Wang W, Hu C, Liu Y, Wang X. Ship Recognition from Chaff Clouds with Sophisticated Polarimetric Decomposition. Remote Sensing. 2020; 12(11):1813. https://doi.org/10.3390/rs12111813
Chicago/Turabian StyleLi, Yongzhen, Sinong Quan, Deliang Xiang, Wei Wang, Canbin Hu, Yemin Liu, and Xuesong Wang. 2020. "Ship Recognition from Chaff Clouds with Sophisticated Polarimetric Decomposition" Remote Sensing 12, no. 11: 1813. https://doi.org/10.3390/rs12111813
APA StyleLi, Y., Quan, S., Xiang, D., Wang, W., Hu, C., Liu, Y., & Wang, X. (2020). Ship Recognition from Chaff Clouds with Sophisticated Polarimetric Decomposition. Remote Sensing, 12(11), 1813. https://doi.org/10.3390/rs12111813