1. Introduction
Image processing techniques provide up-to-date and valuable strategies for estimating surface-water velocities in artificial laboratory flumes and natural rivers surrounded by complex hydraulic conditions [
1,
2]. The affordable price of instrumentation and the increasing computing capacity of computers have led to an increase in new and innovative approaches dealing with river monitoring and modelling [
3]. Among them, image velocimetry techniques have gained popularity in estimating surface flow velocities and river stream flows in natural and artificial water bodies. Image velocimetry techniques support standard measuring networks and expand hydrological and hydraulic information of rivers in basins that are not densely instrumented or have limited accessibility [
4,
5]. The versatility of those techniques enables the analysis of a large amount of data on different spatial and temporal scales. For instance, the footage used for image velocimetry analysis can be acquired by fixed cameras, hand-held cameras, smartphones, or unmanned aerial systems (UASs). In addition, the analysis can be performed with several techniques [
6,
7,
8,
9].
Several examples of estimating surface flow velocities and stream flows have been reported in the literature [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. These studies applied image velocimetry techniques in different flow and environmental conditions, typically leading to good agreement with reference data and with accuracy compatible with field measurements (10–20%), but without providing practical guidelines that can be adopted in other situations. Consequently, and despite their popularity and range of applicability, their overall efficacy in natural environments has not yet been fully explored. Most of the algorithms, such as particle tracking velocimetry (PTV) and large-scale particle image velocimetry (LSPIV), require visible patterns on the water surface to track their movement and compute velocities. In some cases, natural patterns like wave crests, vortices, bubbles, or natural debris can provide sufficient information for image processing and velocity estimation. However, high seeding densities can rarely be reached in natural environments, especially during low-flow conditions; therefore, artificial tracers are often used to increase surface seeding during the acquisition time. A number of researchers have used environmentally friendly tracers for field experiments or other biodegradable materials such as wood chip tracers, candles, rice crackers, eco foam, or hot/cold water in addition to thermal cameras [
23,
24]. The correct identification of tracers and the patterns they create is essential for PTV and LSPIV image velocimetry analysis. A correct match between identified features in consecutive frames is crucial for the proper application of the techniques mentioned above, increasing the accuracy of velocity results. In particular, the most critical factors affecting accuracy rely on different levels of illumination, the presence of shadows, and tracer/feature properties such as dimension, shape, colour, and spatial seeding distribution with the possibility of forming clusters of tracers.
Seeding density and tracer distribution are among the most critical factors for successful application of PTV and LSPIV, stressing the pattern detection capability of the algorithms [
25,
26]. In turn, the colour and contrast of tracers with respect to the background are essential for successful image processing. Poor illumination, sunlight reflection, glare, and shadows on the flow surface can introduce noise, resulting in the deterioration of possibly identifiable patterns [
11,
27].
The issues mentioned above have been partially addressed in the application of some pre-processing techniques, facilitating the particle detection process and the respective motion tracking. Pre-processing techniques encompass orthorectification, stabilization, and image enhancement, such as contrast limited adaptive histogram equalization (CLAHE) [
28], intensity highpass [
29], and intensity capping [
30]. Various authors modified the experimental settings to improve image processing output. Dal Sasso et al. [
20] used different types of tracers to enhance the contrast with the colour of the water (turbid and clear). Tauro et al. [
31] proposed the use of eco-compatible fluorescent particle tracers for experimental measurements in small-scale streams and hill slopes to overcome the problems related with illumination conditions and particle visibility. Tauro and Grimaldi [
24] proposed the use of ice tracers and thermal cameras to characterize surface flow velocities employing image velocimetry techniques. Lin et al. [
32] and Kinzel and Legleiter [
33] used compact UASs equipped with thermal infrared cameras to detect the movement of flow features expressed as subtle differences in temperature at the water surface without visible tracer materials or artificial seeding of the flow.
Tracer dimension and shape are also critical issues in image-based velocimetry results due to their impact on the efficacy of this method. For PTV analysis, the tracer dimensions should be smaller than the frame-by-frame displacement since the algorithm must follow the tracers’ motion, occupying at least one pixel. If particle dimensions are on the same order of magnitude as the frame-by-frame displacement, errors can occur in the detection of particle centroids [
5,
34]. Similarly, for LSPIV analysis, tracer dimension and velocity are key in the choice of interrogation and search areas. LSPIV presents a higher degree of variability for lower velocities and becomes inapplicable when the displacement of the correlation peak is outside the search area [
5,
26]. Generally, authors have suggested setting a frame rate proportional to the flow velocity, opening the possibility of subsampling slow flows to reduce the computational time [
8]. Besides, the different shapes and visibility of tracers can affect their identification determining no realistic velocity vectors [
25,
35,
36].
All these factors can influence the accuracy of velocity field estimation using PTV and LSPIV techniques. In this regard and to better understand the optimal setup for image-based velocimetry techniques, Raffel et al. [
36] and Dal Sasso et al. [
20] adopted numerical simulations to reproduce realistic configurations of randomly distributed tracers on a uniform flux. They compared the sensitivity of image velocimetry techniques to seeding density and number of frames. Based on their findings, LSPIV displayed significantly higher sensitivity to particle density compared with PTV, especially under low seeding density conditions. In turn, increasing the number of frames can beneficially affect both techniques (e.g., [
8,
20,
37]). The results reported in the aforementioned works tended to emphasize that the performance of PTV is less sensitive to actual flow velocity and seeding density. However, the latter may commonly provide an incomplete characterization of the flow velocity field when there is low seeding density or non-uniform distribution of patterns characterising the flow. To address these issues, Pizarro et al. [
38] performed numerical simulations considering different levels of particle aggregation and seeding density to determine the associated uncertainty and optimal experimental setup that would minimise image velocimetry errors.
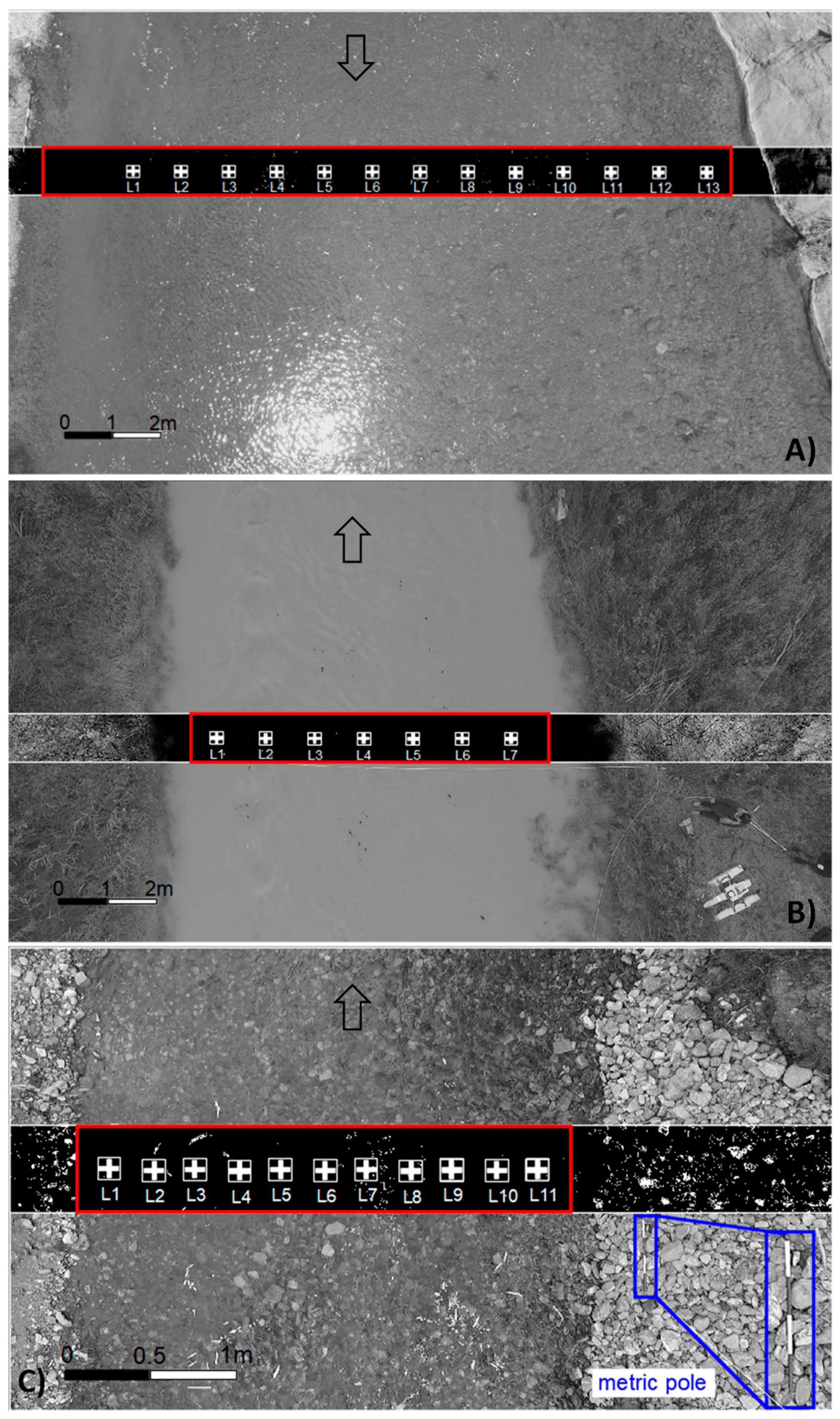
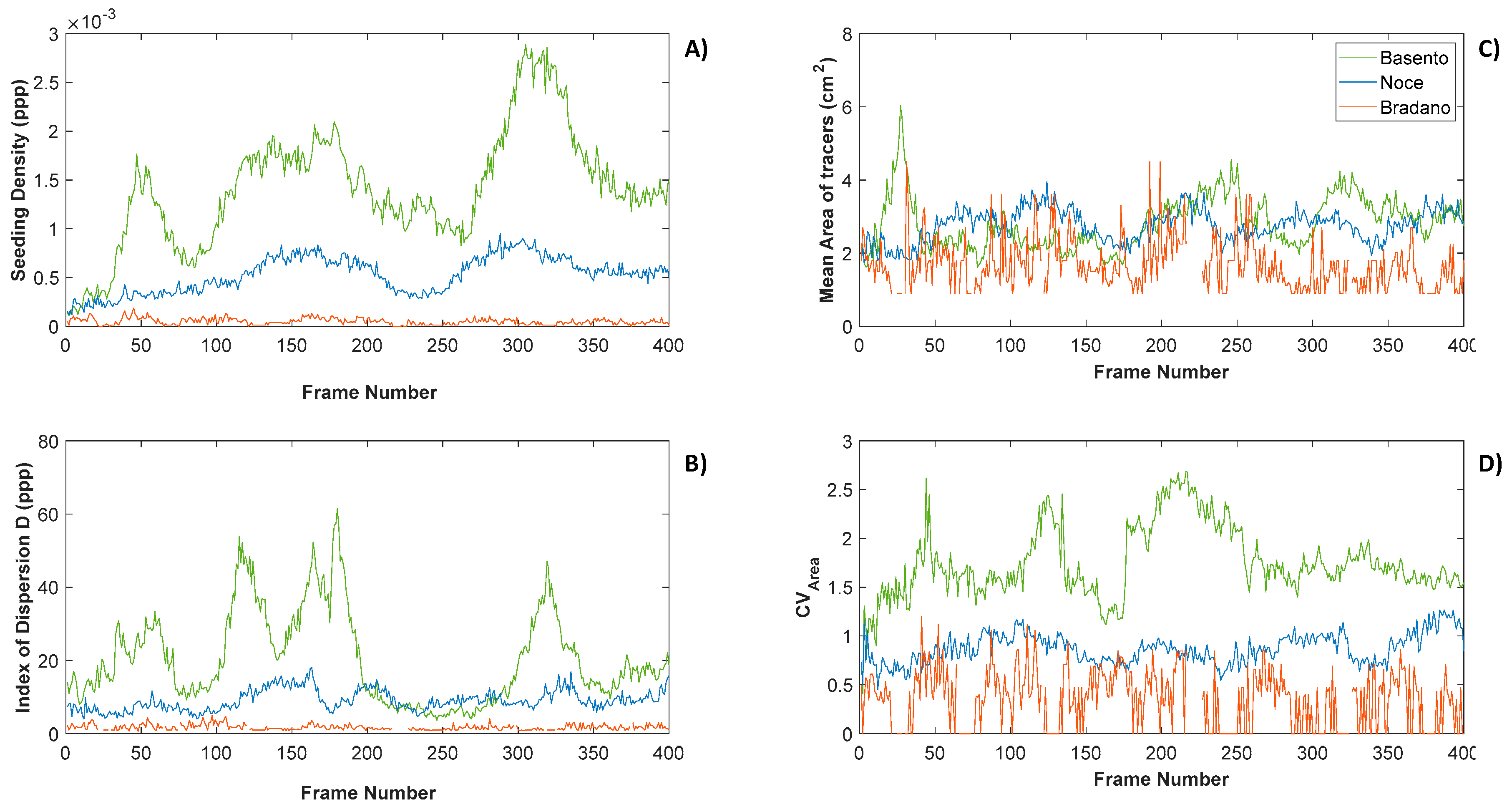
Based on the lack of practical guidelines for image velocimetry analysis based on different seeding properties, we aimed to investigate the accuracy of PTV and LSPIV on three real case studies characterised by different seeding and environmental conditions. To achieve this aim, three metrics were adopted for a preliminary description of seeding characteristics based on calculation of the (i) seeding density, (ii) index of dispersion of tracers, and (iii) coefficient of variation of tracer dimension. These metrics allowed us to describe the spatial and temporal characteristics of seeding during the video acquisition period. The rest of the paper is organised as follows:
Section 2 presents the three case studies, field measurements, and video pre-processing procedures. Seeding characterisation using a novel algorithm we recently developed as well as PTV and LSPIV techniques are also briefly introduced.
Section 3 presents the image velocimetry results compared with reference velocities. The results undergo multiple regression analysis with the aim of identifying the influence of each metric on the associated errors. Conclusions are provided in the final section.
4. Discussion
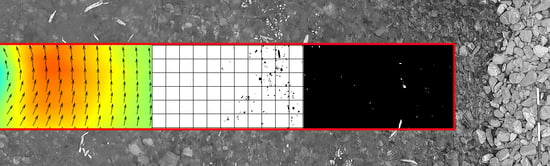
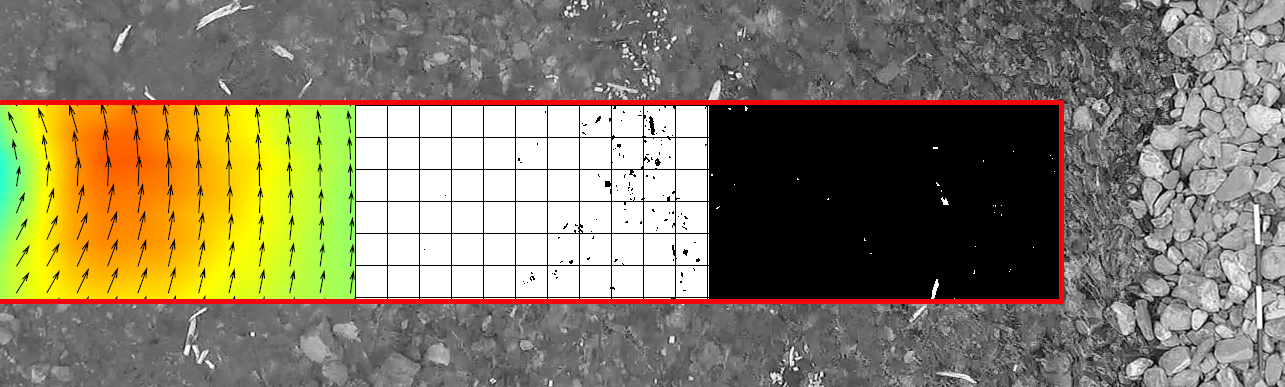
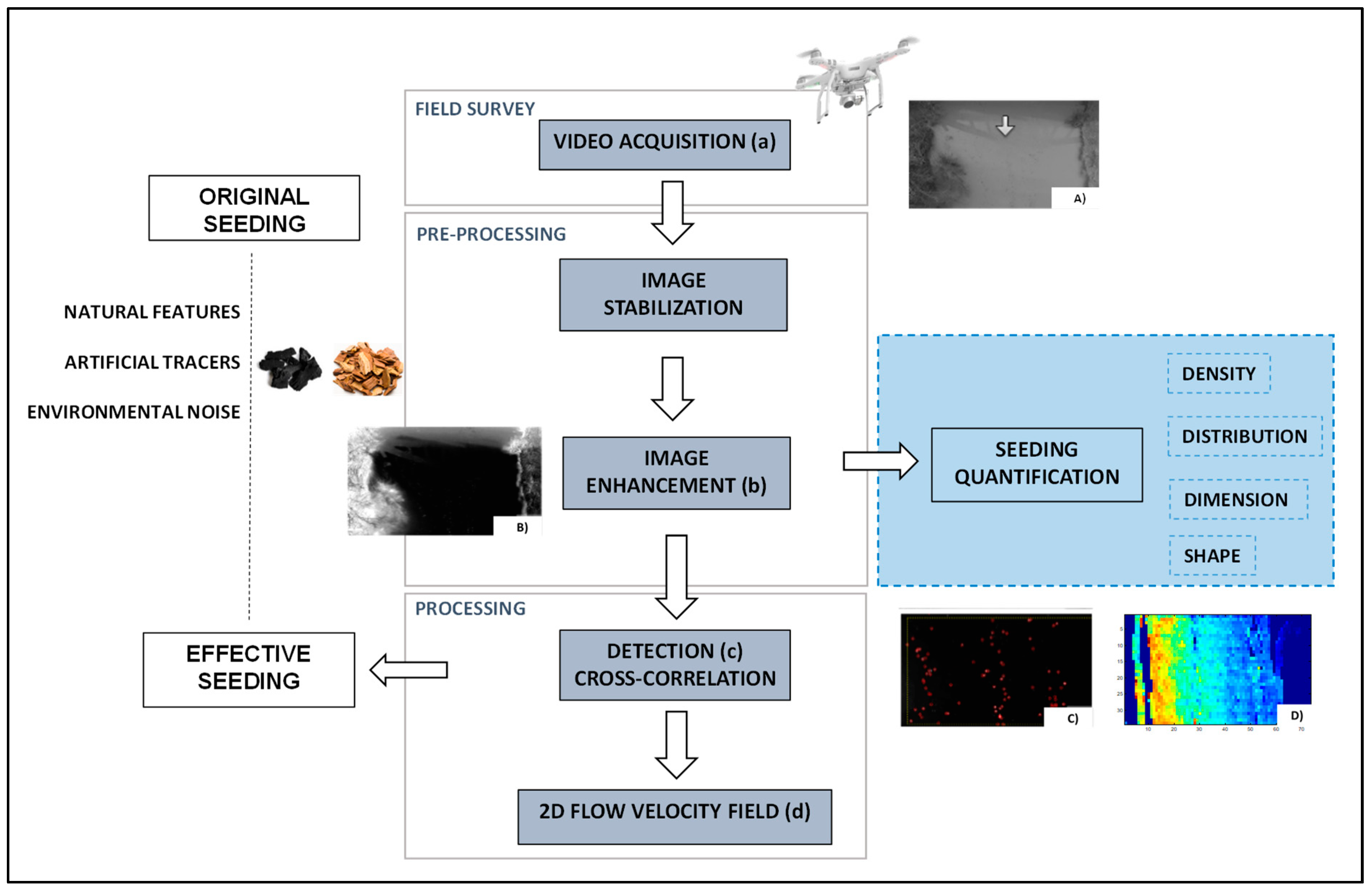
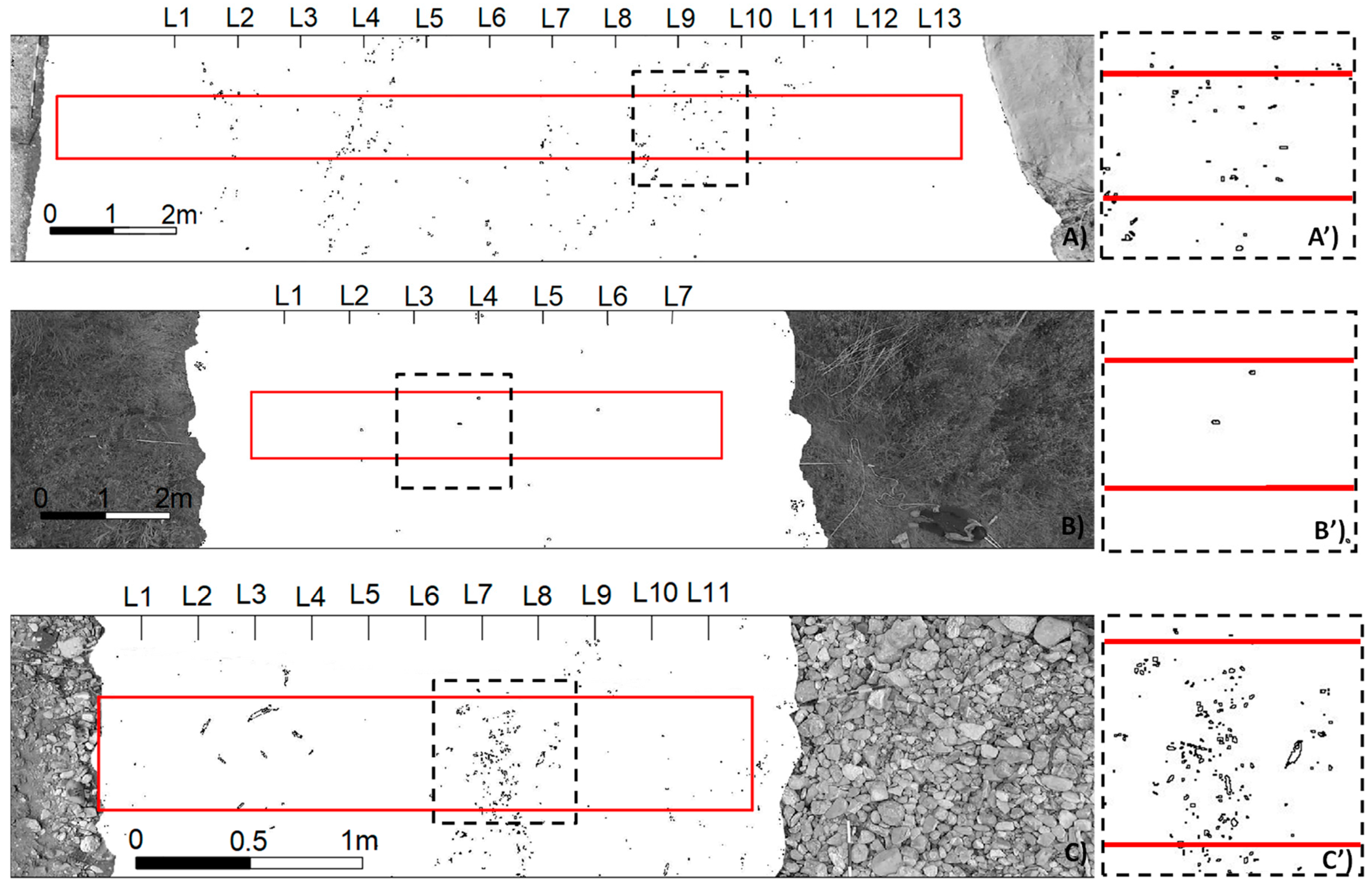
The number, distribution, and characteristics of features on the surface of water are crucial factors for obtaining accurate PTV and LSPIV results. Seeding can be represented by flow features (e.g., ripples), natural objects transiting in the field of view, or artificial floaters. Generally, in field applications, the shape and dimension of floating material can be non-uniform and the spatial distribution of features inhomogeneous in the whole cross-section. Actual seeding in field conditions does not necessarily represent the effective seeding that is used for the application of optical techniques. This is evidenced by the process of detecting and matching features between image pairs. Noise due to environmental conditions, such as illumination or shadows, can strongly influence the quantification of effective seeding. Low seeding due to a lack of tracers or matching issues generally lead to an incomplete surface velocity field or unreliable results. However, in the pre-processing phase, the original seeding can be maximised using techniques to emphasise the contrast between tracers and water background. This step is essential for facilitating particle detection and cross-correlation. In turn, filters can be applied in a post-processing phase to improve the reliability of cross-correlation results in deleting spurious vectors.
In this work, three metrics were defined and implemented to quantify the seeding behaviour in the pre-processing phase: seeding density in ppp, the dispersion index, and the coefficient of variation of tracer area. They were applied in three field case studies characterised by different environmental conditions and seeding characteristics. LSPIV and PTV techniques were applied to pre-processed images to maximise the contrast between particles and background, without any filter to isolate and remove inaccurate vectors (outliers).
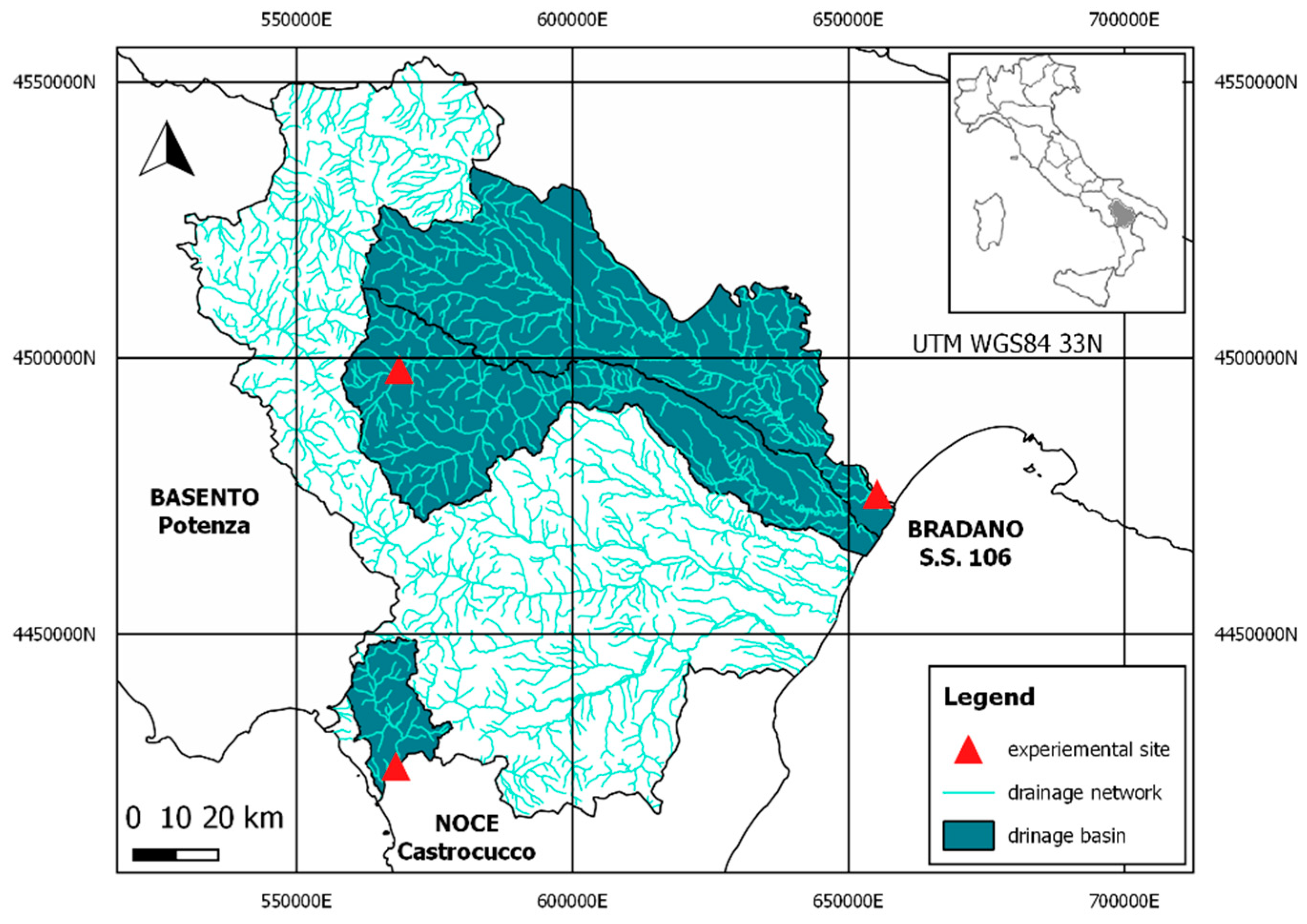
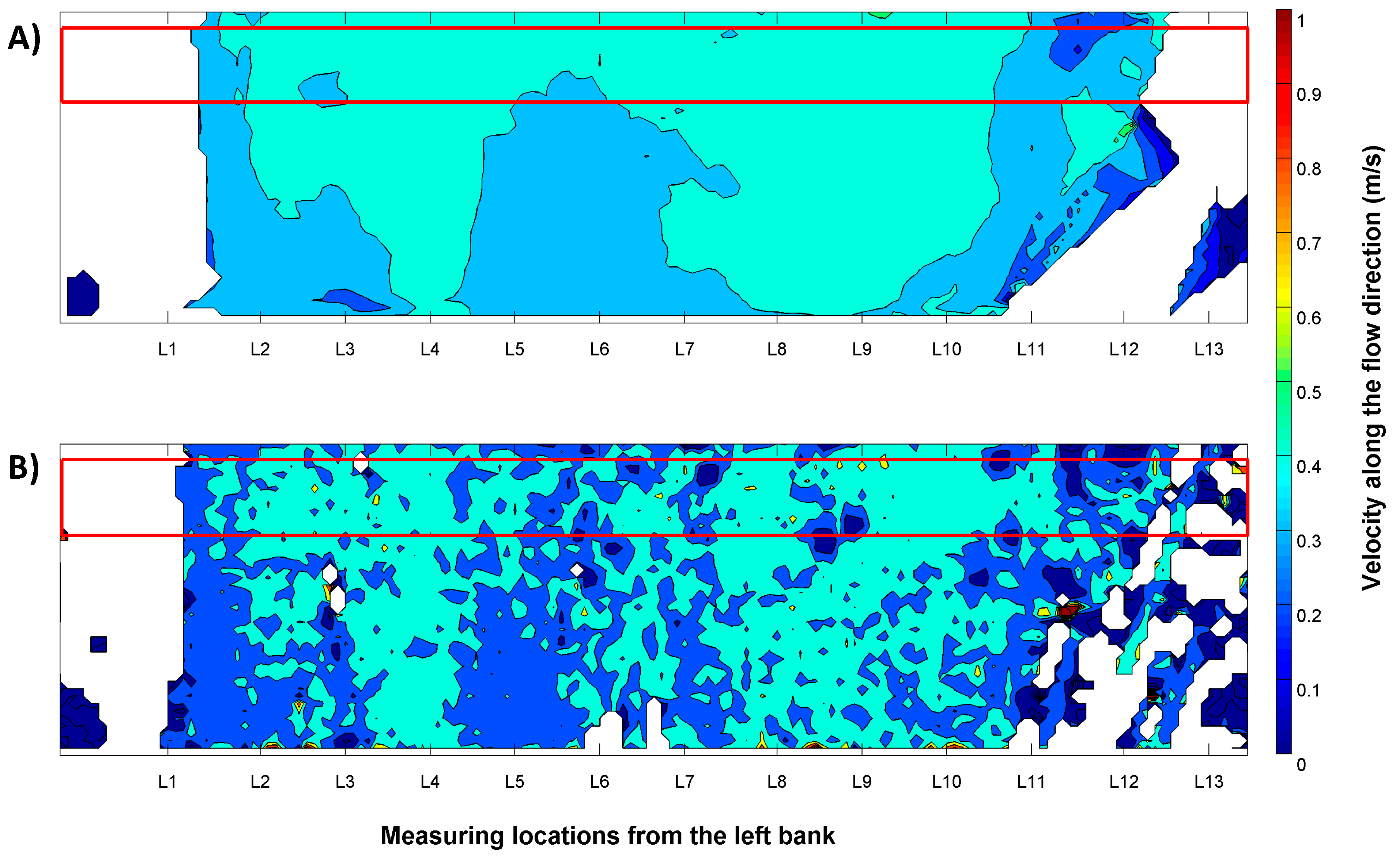
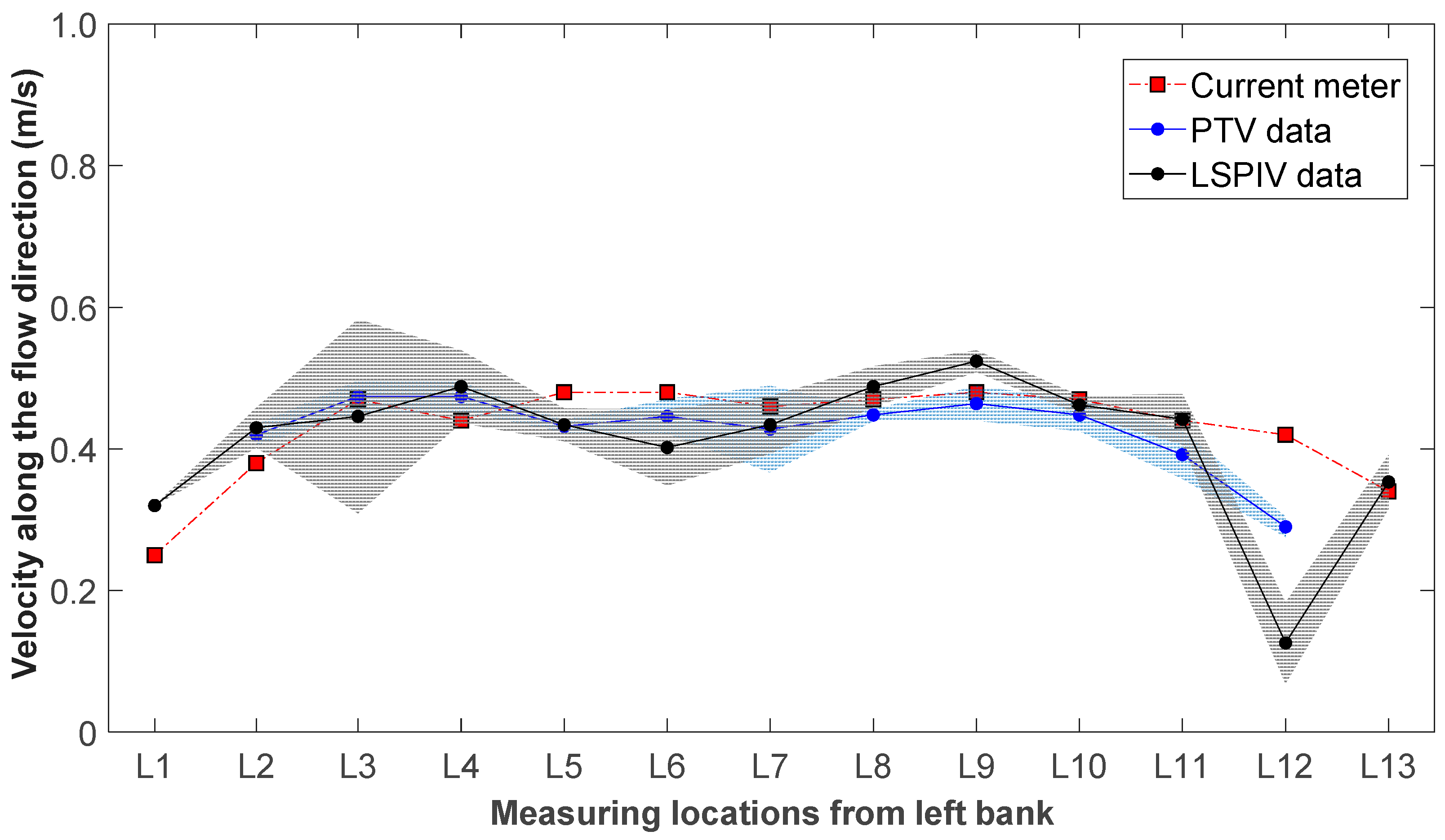
The Noce River campaign was characterised by medium seeding conditions (5.28 × 10−4 ppp), an average index of dispersion (9.09 ppp), and tracers with a relatively uniform dimension (CVArea = 0.87). It was also characterised by significant light reflections on the free water surface. The effective seeding used in PTV analysis was reduced by 56% compared with the original detected seeding. Despite this, the presence of seeding along the cross-section allowed us to obtain satisfactory results using the PTV algorithm (RMSE = 0.049 m/s). LSPIV seemed to be more affected by the influence of the noise of environmental conditions. This was manifested as more unstable results along the cross-section, probably because velocity vectors were obtained by averaging the displacement of many features transiting in the interrogation windows, increasing the chances of catching noisy features in the analysis.
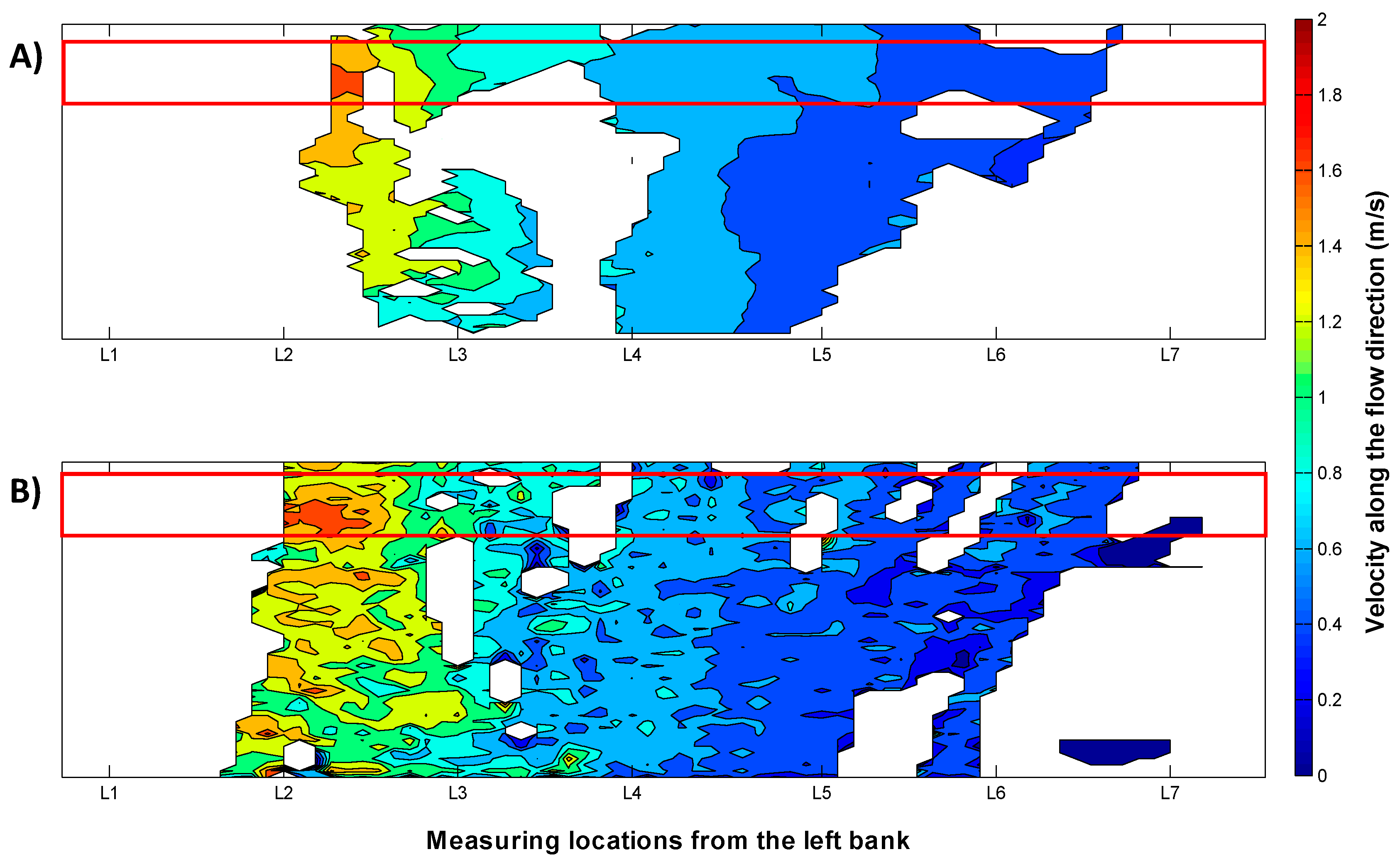
The Bradano River was characterised by very low seeding density (4.99 × 10−5 ppp), and a lower dispersion index (1.72 ppp) and coefficient of variation of tracer area (CVArea = 0.35). Environmental conditions and more homogeneous seeding characteristics favoured an effective seeding reduction of only 19% with respect to the original estimated seeding. Low seeding affected the calculation of velocity over locations from FW1 to FW4, especially for PTV, due to the lack of tracking features. LSPIV with the FFT correlation approach allowed us to obtain reliable estimations for high and low velocities. Both techniques produced reliable results in close agreement with reference velocity measurements.
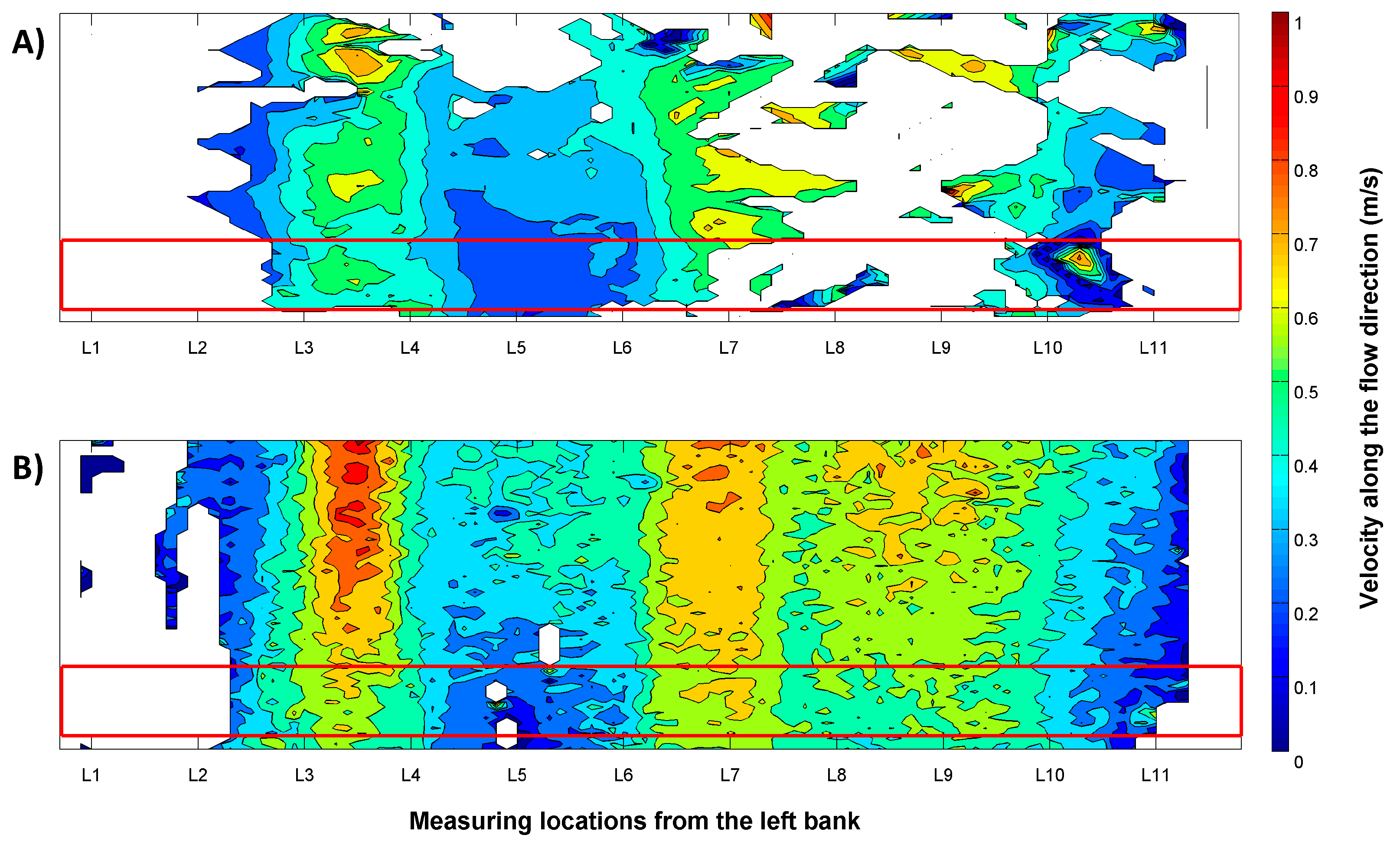
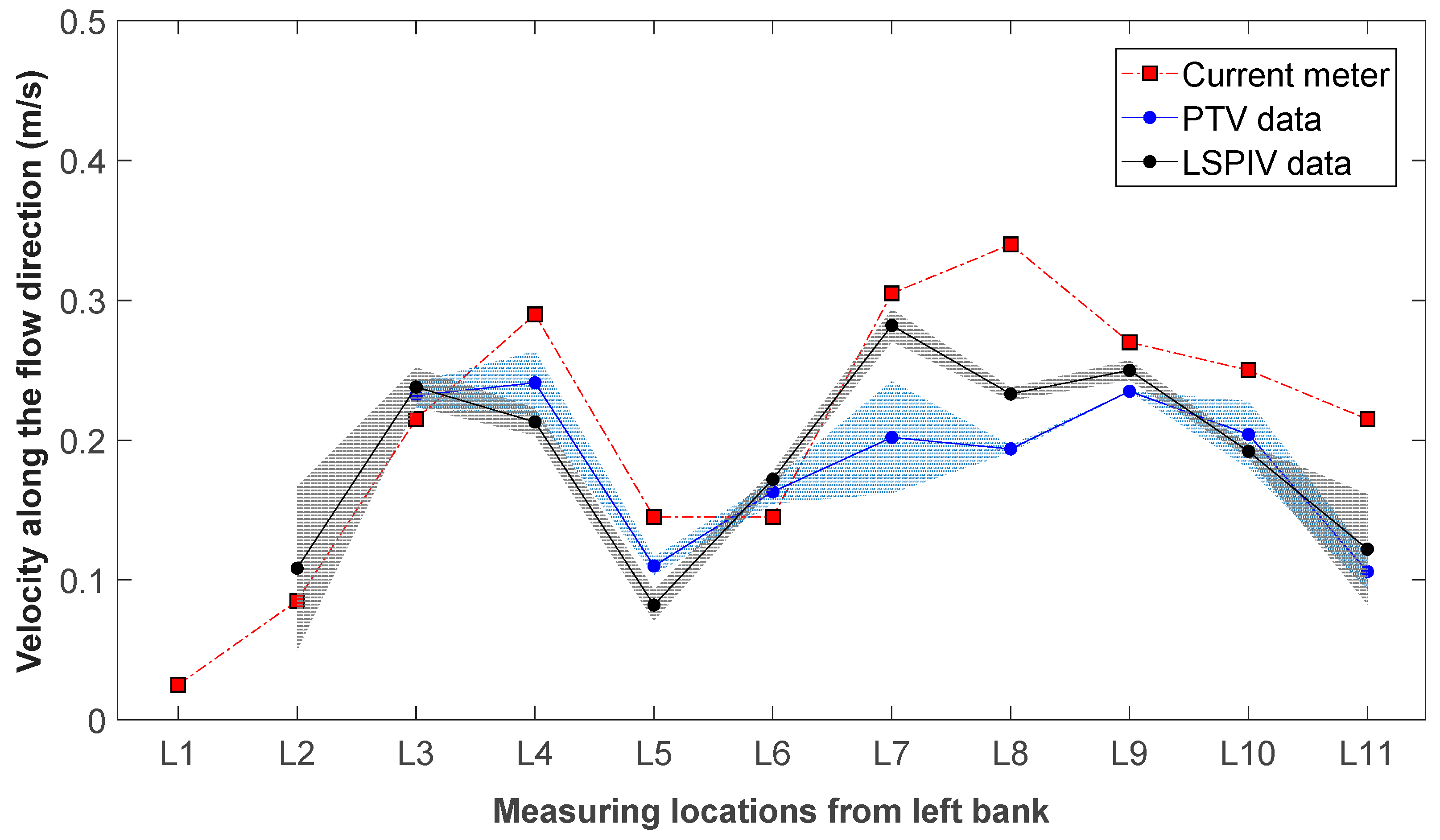
The Basento River was characterised by higher seeding conditions compared with the others (1.40 × 10−3 ppp). Tracers presented irregular shapes and dimensions (CVArea = 1.76), with high dispersion in the field of view (20.37 ppp). The effect of the non-uniform characteristics of tracers and environmental conditions negatively impacted the results of both techniques, stressing the matching and tracking process. The effective seeding used by PTV was reduced by 81%, with an average value of 7.3 × 10−5 (ppp), leading to only a few meaningful trajectories. This produced a significant underestimation of surface velocities.
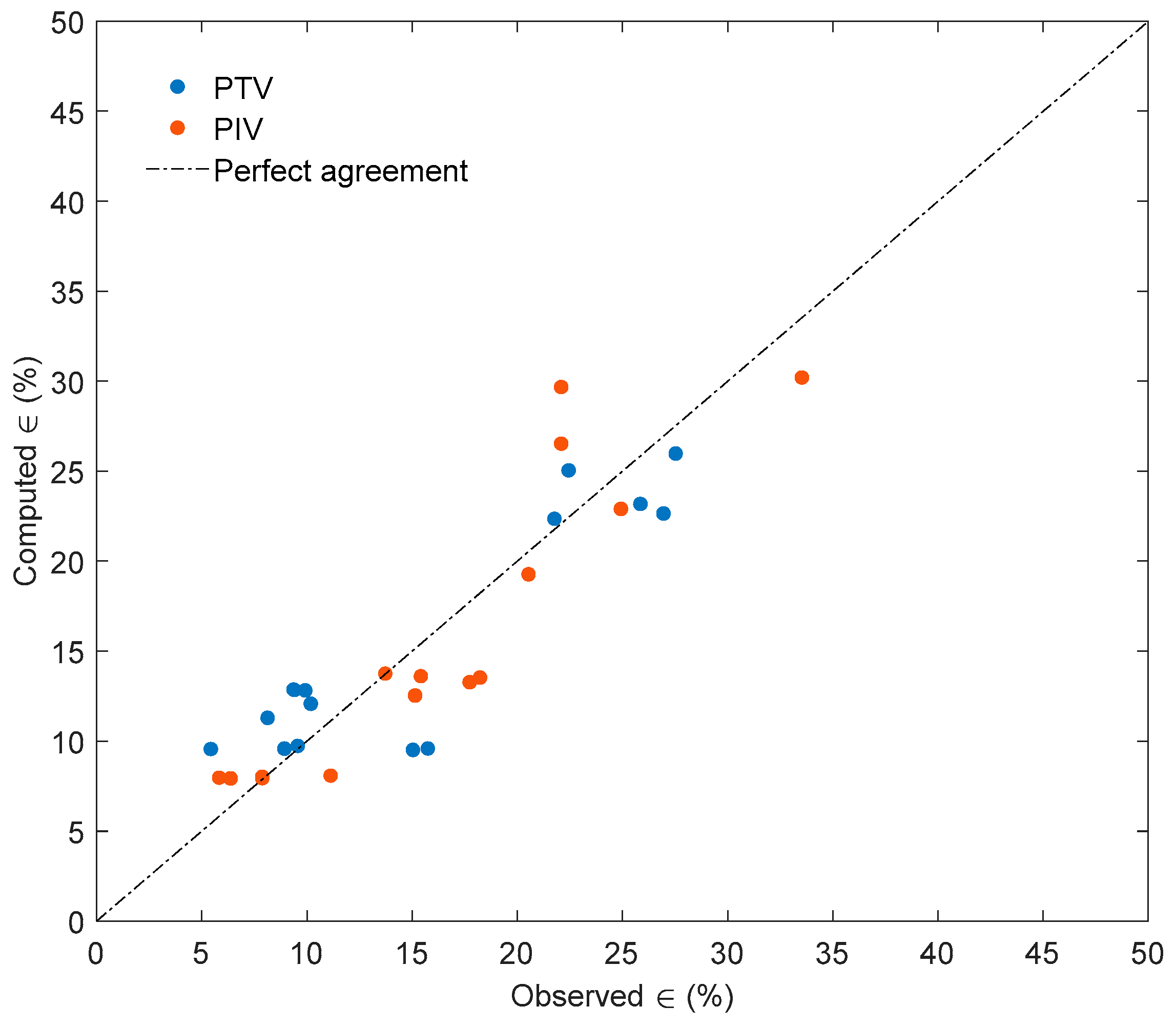
These three metrics were investigated through multiple linear regression analysis to evaluate the influence of seeding characteristics on surface velocity estimation. For both techniques, the results demonstrated that seeding density, the coefficient of variation of tracer dimension, and dispersion index have a similar influence on the accuracy of image velocimetry. In particular, statistical analysis corroborated the importance of seeding density for minimising estimation errors and showed that increasing the coefficient of variation of the tracer dimension and the dispersion index can negatively impact the final results. This suggests that the duration of video recording during field surveys should be increased, allowing the selection of optimal frame windows for analysis to minimise computed velocimetry errors. Increasing the number of frames allows covering different portions of the ROI by features, consequently allowing the computation of velocities across the whole ROI. This is especially important for riverbanks that are often difficult to seed (e.g., Bradano River). Previous experimental findings (e.g., [
8,
20]) support using an increased number of frames to improve the final results with lower variability of velocity estimations.
5. Conclusions
In this study, we focused on the accuracy of PTV and LSPIV image velocimetry techniques under different seeding conditions for three case study locations in Southern Italy. Our findings showed that PTV and LSPIV are sensitive to seeding and tracer characteristics as well as challenging environmental conditions. The seeding density that is effectively used by PTV in the analysis can be reduced up to 81% of the original, highlighting its applicability at very low seeded flows. This leads to an underestimation of flow velocity and, consequently, river discharge. For both techniques, the statistical analysis demonstrated that three metrics (seeding density, dispersion index, and spatial variance of tracer dimension) have a statistically significant influence on the accuracy of velocity estimation and can be used for a priori evaluation of flow seeding conditions. Increasing the number of frames can help with conducting complete velocity field characterisation because it increases the chance of having transiting features on the whole ROI. Consequently, more extended video registration and preliminary quantification of seeding characteristics can help with selecting an appropriate interval to process, image velocimetry technique to apply and related setting parameters, and in controlling the accuracy of results. Future studies should focus on implementing an automatic workflow to enhance the frames in particularly challenging conditions, such as intense sunlight, shadows, and ripples, to better emphasise and discriminate floater objects with respect to the background. Finally, we are currently working with a larger dataset to generalize the multiple regression equation for prediction purposes.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











