Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms



Abstract

1. Introduction
2. Materials and Methods
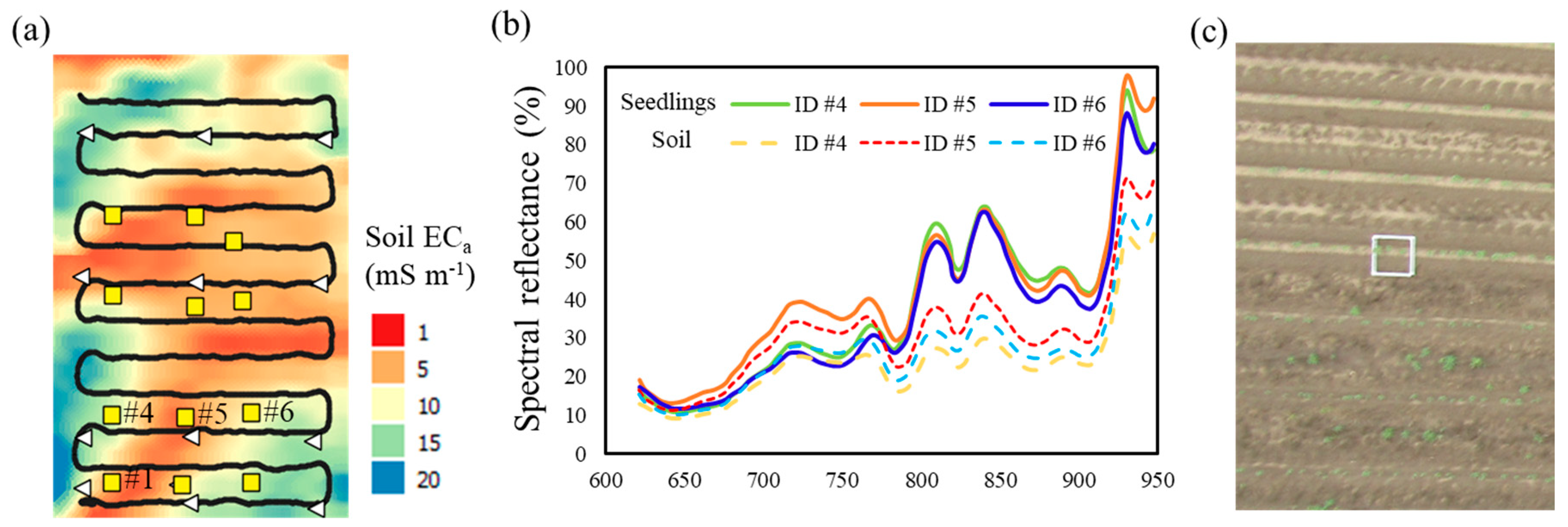
2.1. Experimental Field and Ground Data Collection
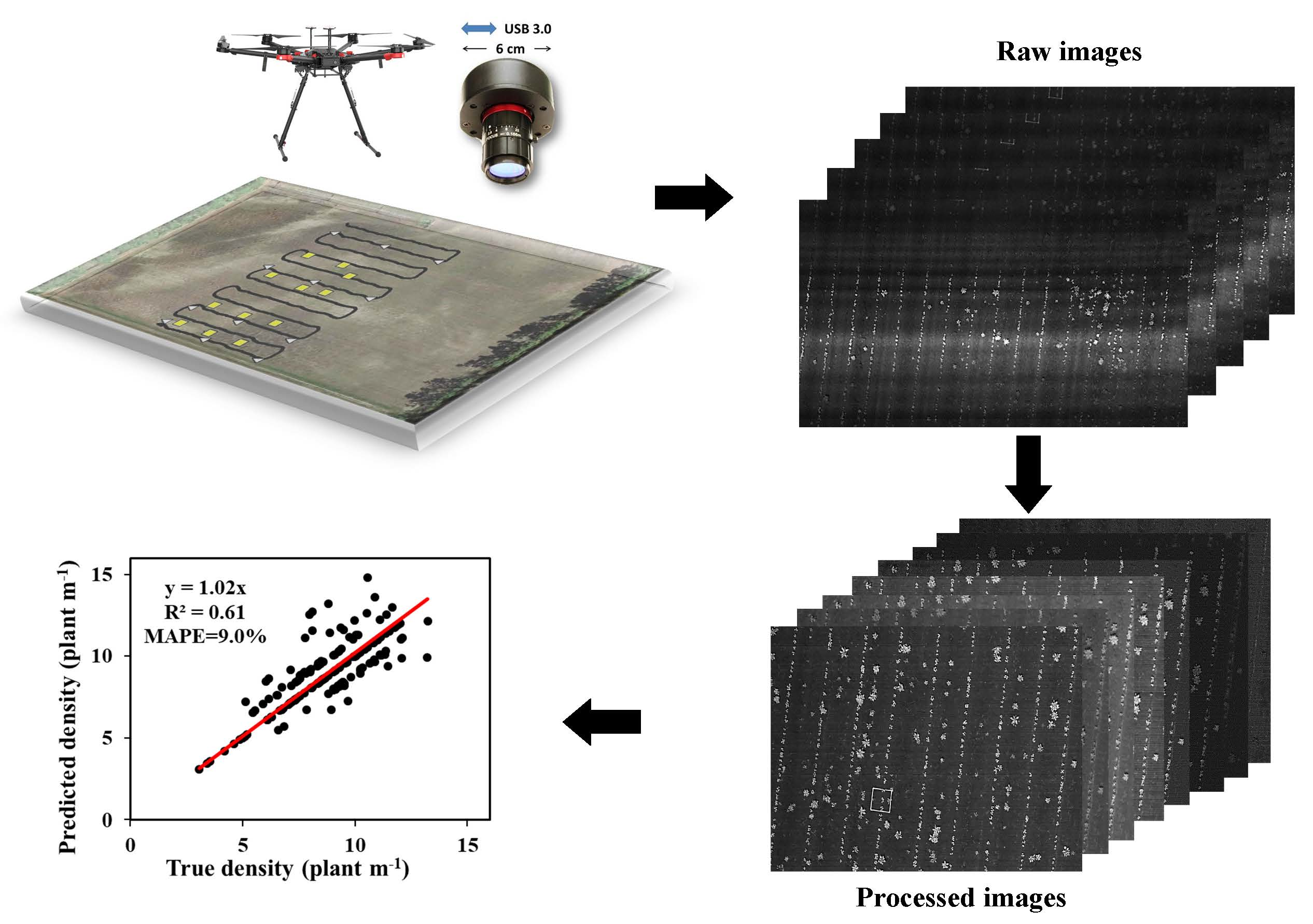
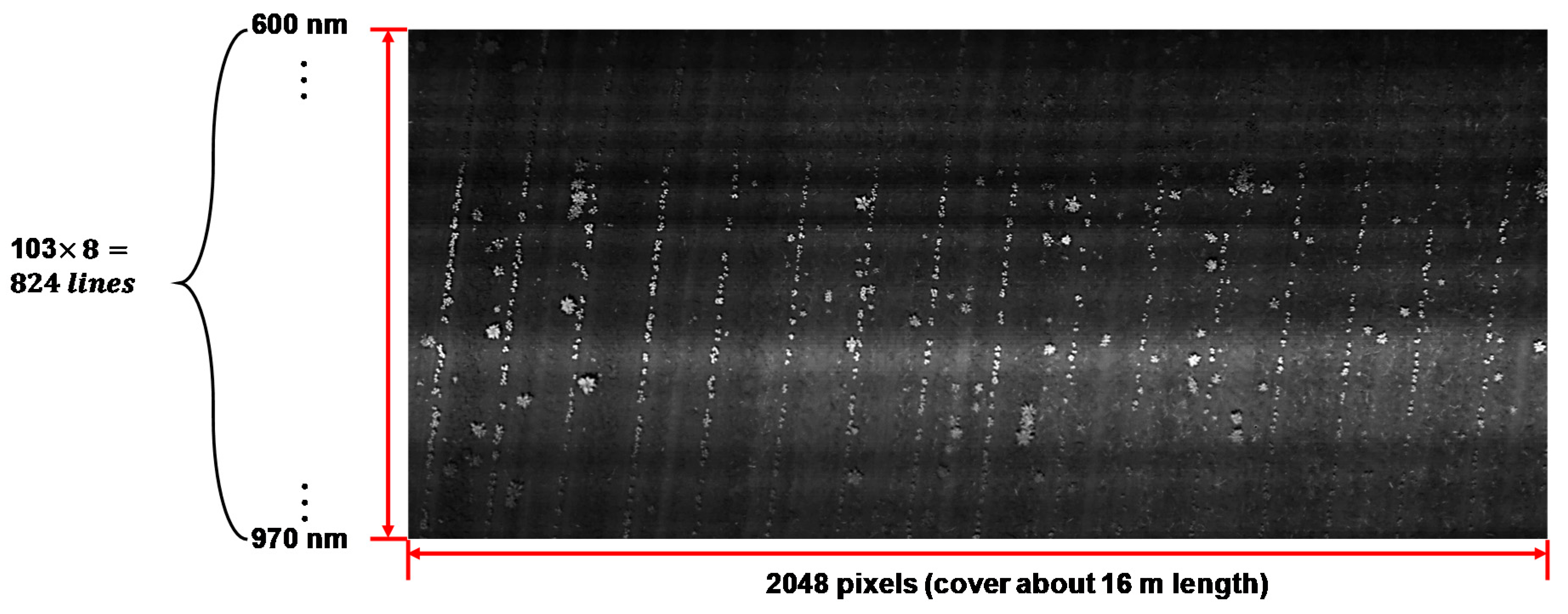
2.2. UAV Imagery Data Acquisition
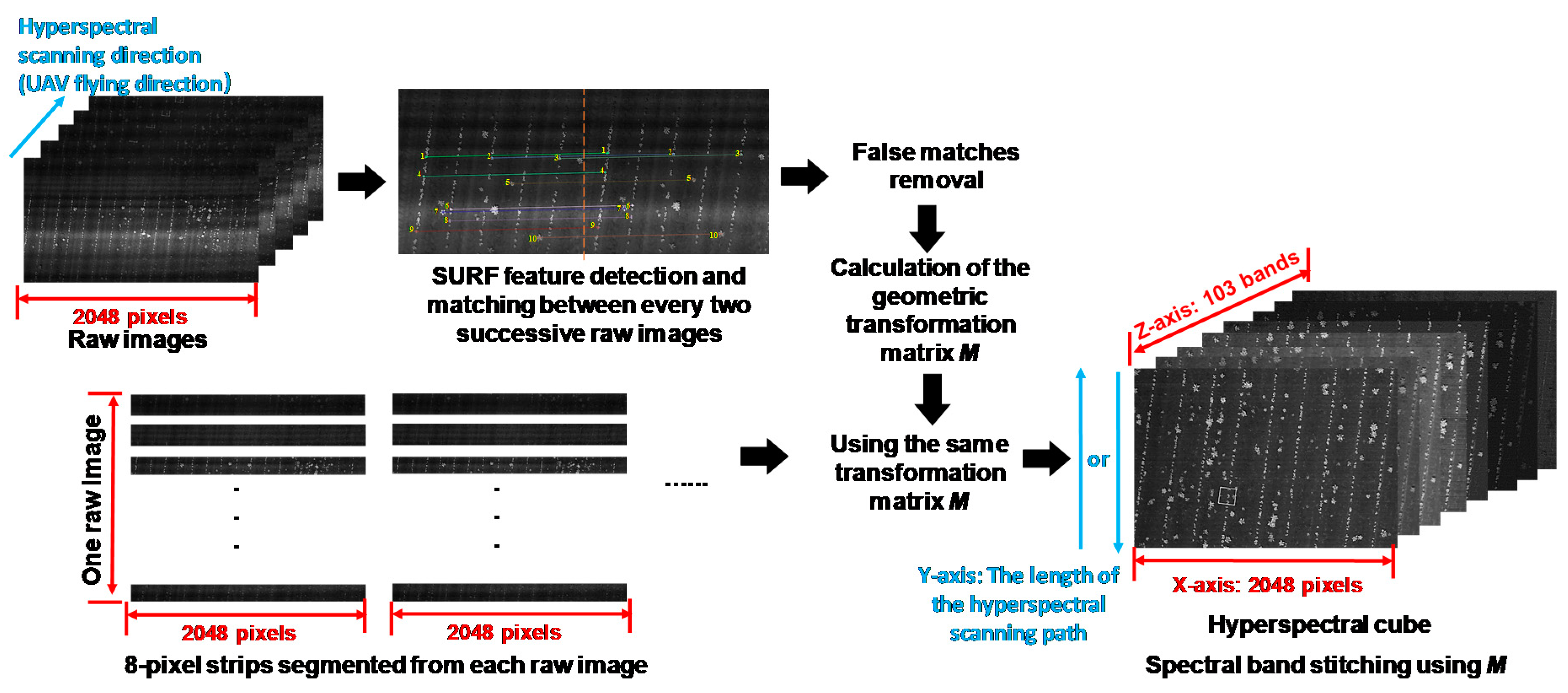
2.3. Image Alignment and Stitching
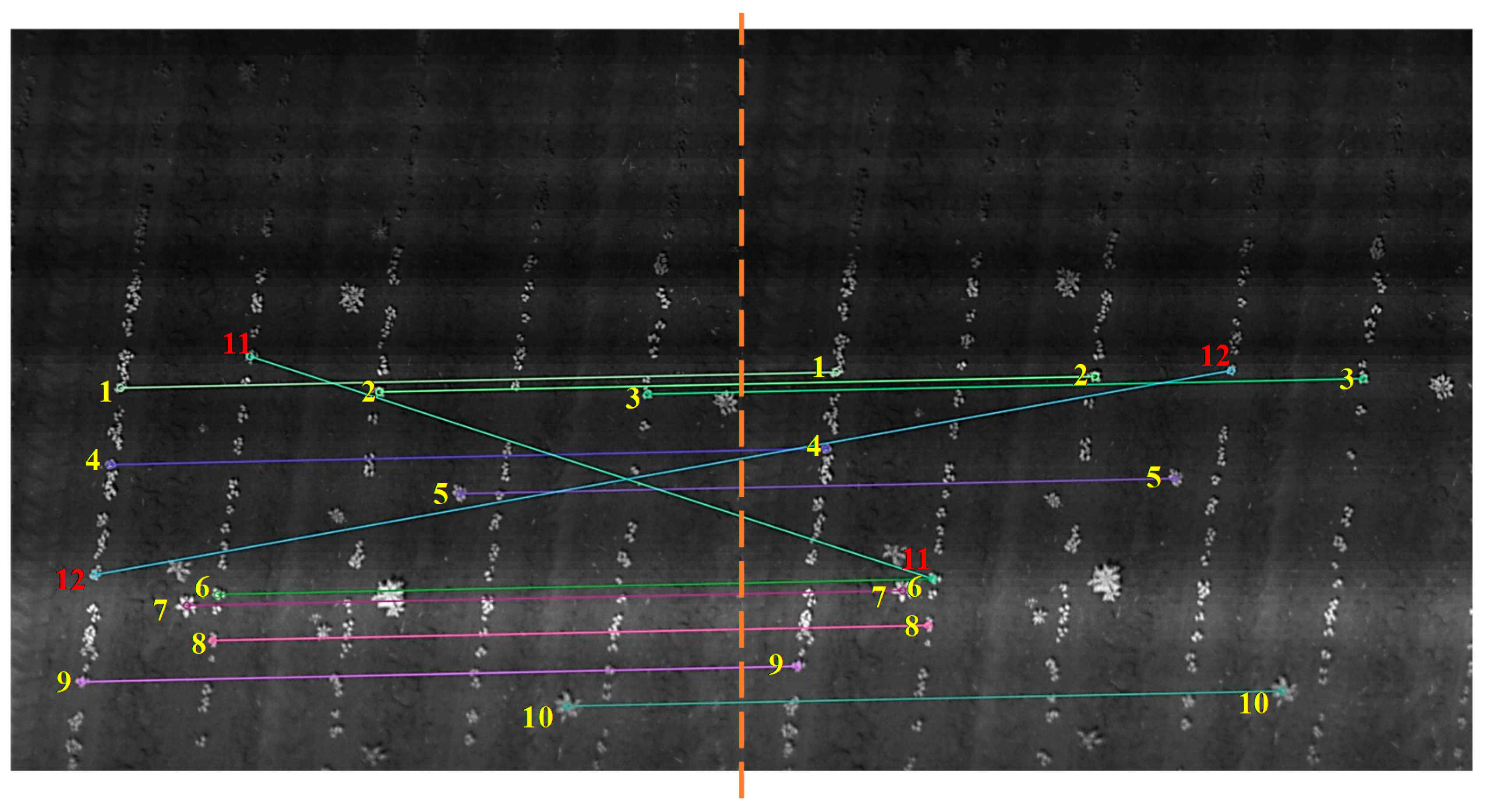
2.3.1. Feature Detection and Matching
2.3.2. Removal of False Matches
2.3.3. Calculation of the Geometric Transformation Matrix
2.3.4. Dynamic Panorama and Spectral Band Stitching
2.3.5. Alignment Error in Images of Different Bands
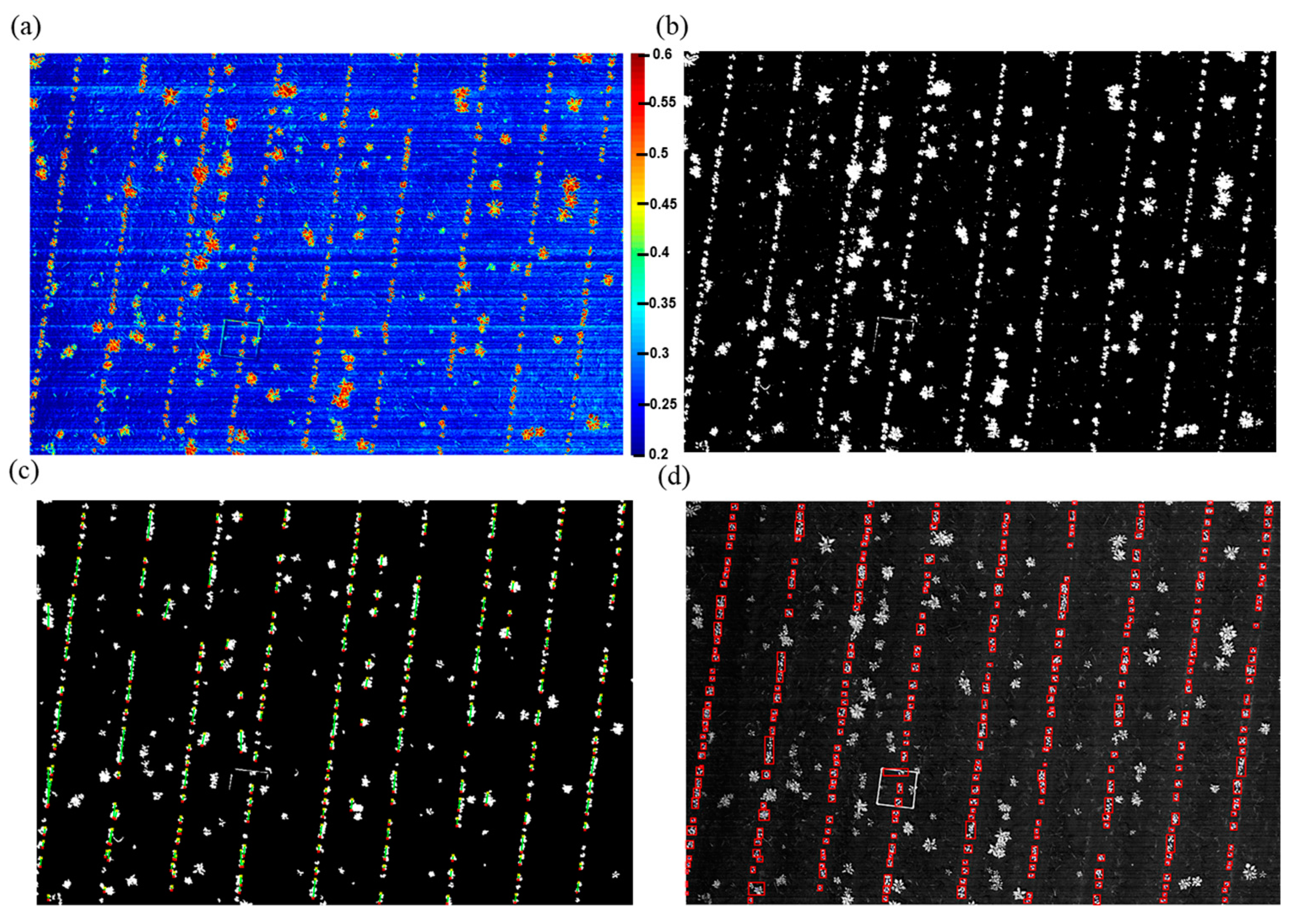
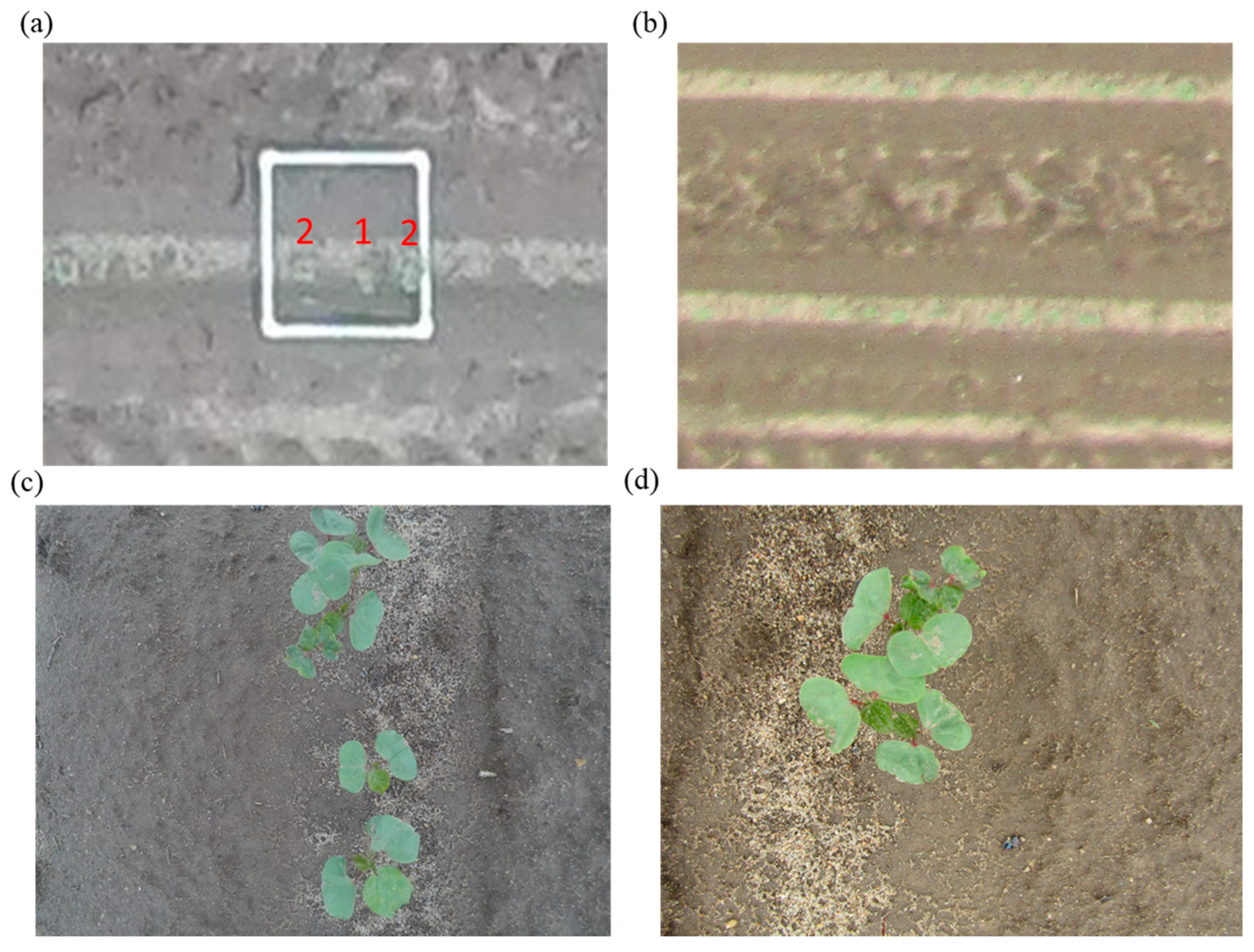
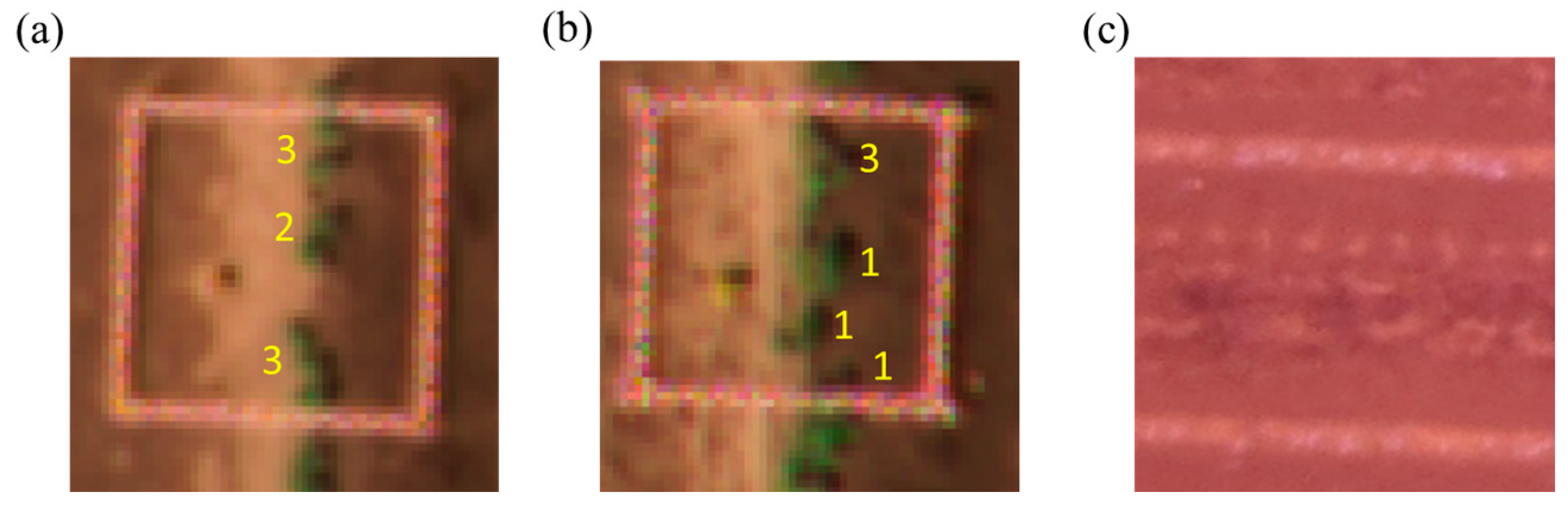
2.4. Segmentation of Cotton Stand
2.5. Evaluation of Cotton Stand Count
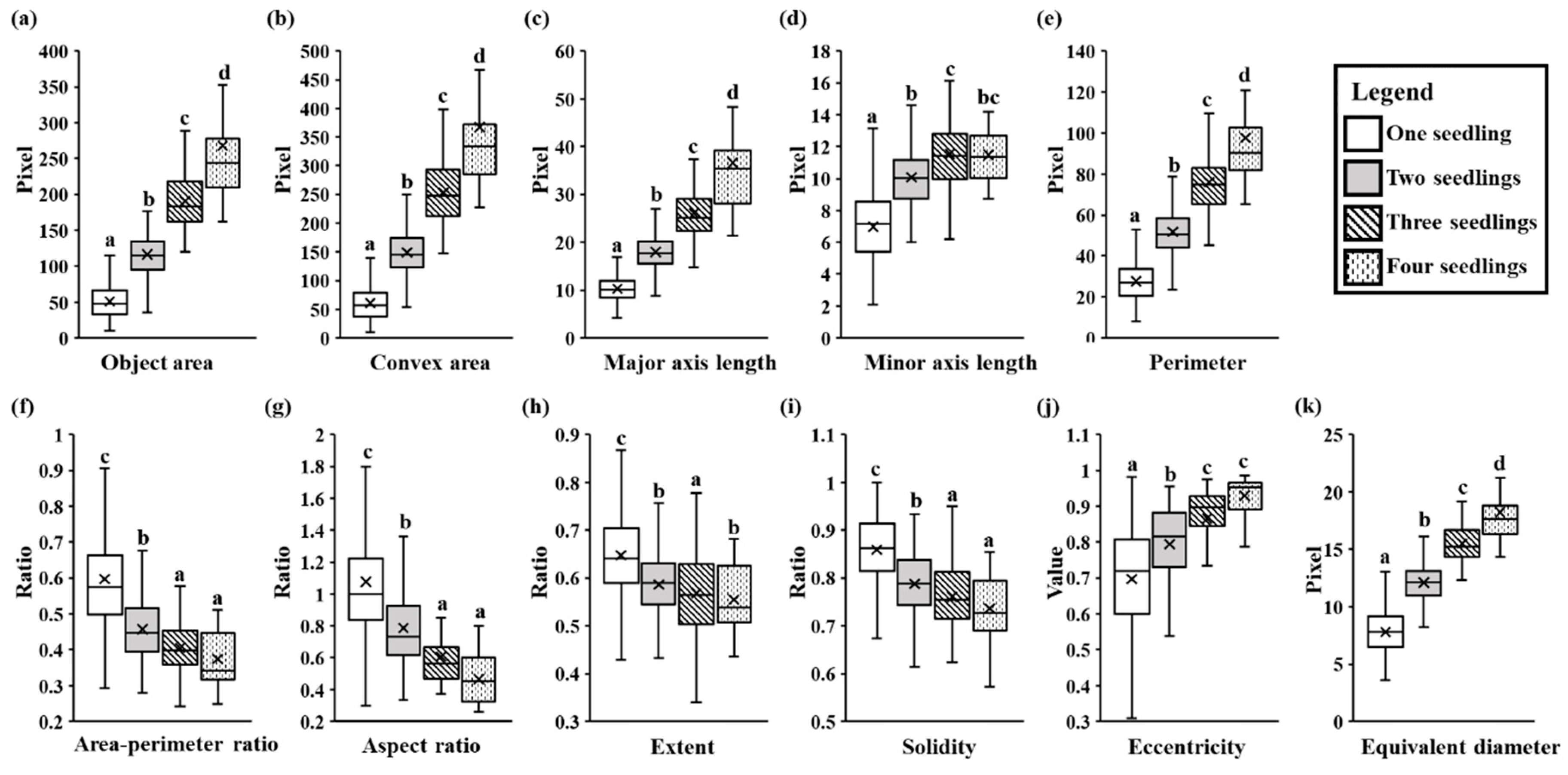
2.5.1. Image Features for Determining Number of Seedlings
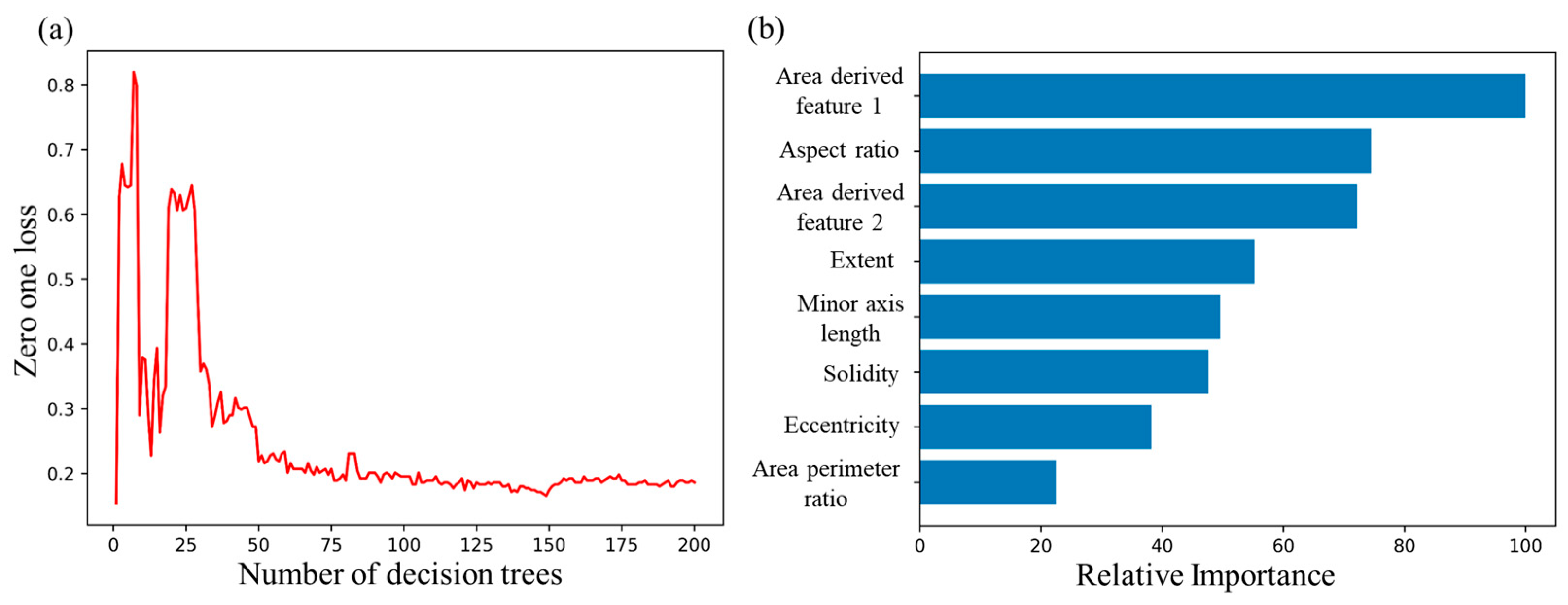
2.5.2. Development of Decision Tree Model
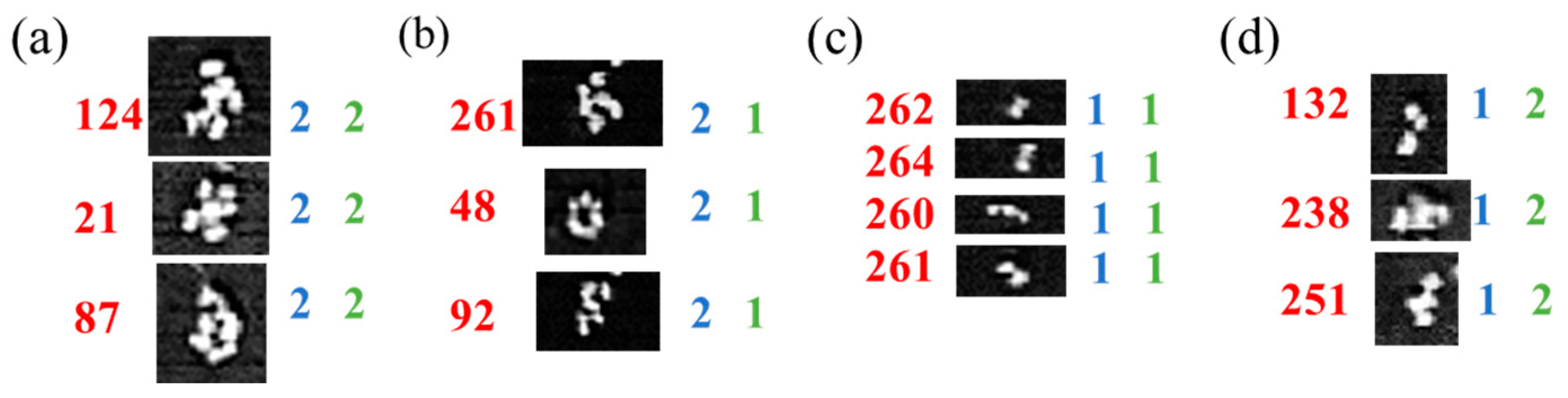
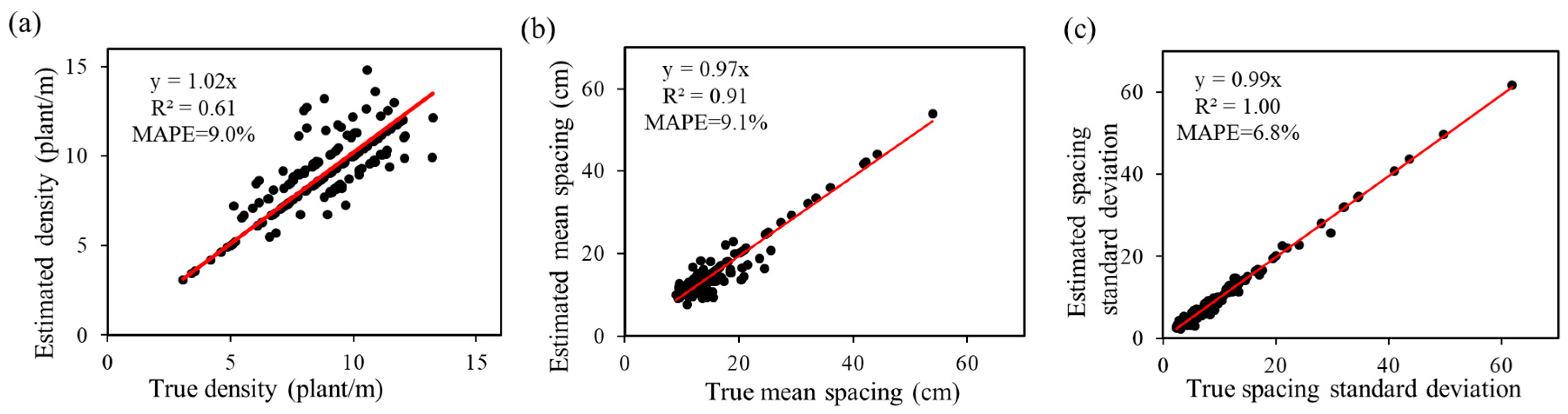
2.5.3. Evaluation of Stand Count and Uniformity
3. Results
3.1. Alignment Error
3.2. ROI Feature Analysis
3.3. Evaluation of Cotton Emergence
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Goodell, P.B.; Davis, R.M.; Godfrey, L.D.; Hutmacher, R.B.; Roberts, P.A.; Wright, S.D.; Barlow, V.M.; Haviland, D.R.; Munier, D.J.; Natwick, E.T. UC IPM Pest Management Guidelines Cotton; UC ANR Publication: Oakland, CA, USA, 2015. [Google Scholar]
- Sansone, C.; Isakeit, T.; Lemon, R.; Warrick, B. Texas Cotton Production: Emphasizing Integrated Pest Management; Texas Cooperative Extension Service, The Texas A & M University System: College Station, TX, USA, 2002. [Google Scholar]
- Supak, J. Making replant decisions. In Proceedings of the 1990 Beltwide Cotton Production Conference, Las Vegas, NV, USA, 10–13 January 1990; pp. 45–48. [Google Scholar]
- Wiles, L.J.; Schweizer, E.E. The cost of counting and identifying weed seeds and seedlings. Weed Sci. 1999, 47, 667–673. [Google Scholar] [CrossRef]
- Liu, S.; Baret, F.; Allard, D.; Jin, X.; Andrieu, B.; Burger, P.; Hemmerlé, M.; Comar, A. A method to estimate plant density and plant spacing heterogeneity: Application to wheat crops. Plant Methods 2017, 13, 38. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Li, R.; Jin, X.; Ding, J.; Zhu, X.; Sun, C.; Guo, W. Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery. Remote Sens. 2017, 9, 1241. [Google Scholar] [CrossRef]
- Nakarmi, A.; Tang, L. Automatic inter-plant spacing sensing at early growth stages using a 3D vision sensor. Comput. Electron. Agric. 2012, 82, 23–31. [Google Scholar] [CrossRef]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Chen, R.; Chu, T.; Landivar, J.A.; Yang, C.; Maeda, M.M. Monitoring cotton (Gossypium hirsutum L.) germination using ultrahigh-resolution UAS images. Precis. Agric. 2018, 19, 161–177. [Google Scholar] [CrossRef]
- Varela, S.; Dhodda, P.R.; Hsu, W.H.; Prasad, P.; Assefa, Y.; Peralta, N.R.; Griffin, T.; Sharda, A.; Ferguson, A.; Ciampitti, I.A. Early-season stand count determination in corn via integration of imagery from unmanned aerial systems (UAS) and supervised learning techniques. Remote Sens. 2018, 10, 343. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, J.; Yang, C.; Zhou, G.; Ding, Y.; Shi, Y.; Zhang, D.; Xie, J.; Liao, Q. Rapeseed seedling stand counting and seeding performance evaluation at two early growth stages based on unmanned aerial vehicle imagery. Front. Plant Sci. 2018, 9, 1362. [Google Scholar] [CrossRef]
- Wu, J.; Yang, G.; Yang, X.; Xu, B.; Han, L.; Zhu, Y. Automatic counting of in situ rice seedlings from UAV images based on a deep fully convolutional neural network. Remote Sens. 2019, 11, 691. [Google Scholar] [CrossRef]
- Ribera, J.; Chen, Y.; Boomsma, C.; Delp, E. Counting plants using deep learning. In Proceedings of the 2017 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Montreal, QC, Canada, 14–16 November 2017; pp. 1344–1348. [Google Scholar]
- Li, B.; Xu, X.; Han, J.; Zhang, L.; Bian, C.; Jin, L.; Liu, J. The estimation of crop emergence in potatoes by UAV RGB imagery. Plant Methods 2019, 15, 15. [Google Scholar] [CrossRef]
- Gnädinger, F.; Schmidhalter, U. Digital counts of maize plants by unmanned aerial vehicles (UAVs). Remote Sens. 2017, 9, 544. [Google Scholar] [CrossRef]
- Buters, T.M.; Belton, D.; Cross, A.T. Multi-sensor UAV tracking of individual seedlings and seedling communities at millimetre accuracy. Drones 2019, 3, 81. [Google Scholar] [CrossRef]
- Buters, T.; Belton, D.; Cross, A. Seed and seedling detection using unmanned aerial vehicles and automated image classification in the monitoring of ecological recovery. Drones 2019, 3, 53. [Google Scholar] [CrossRef]
- Sankaran, S.; Quirós, J.J.; Knowles, N.R.; Knowles, L.O. High-resolution aerial imaging based estimation of crop emergence in potatoes. Am. J. Potato Res. 2017, 94, 658–663. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Carter, A.H. Field-based crop phenotyping: Multispectral aerial imaging for evaluation of winter wheat emergence and spring stand. Comput. Electron. Agric. 2015, 118, 372–379. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Crusiol, L.G.T.; Nanni, M.R.; Furlanetto, R.H.; Cezar, E.; Silva, G.F.C. Reflectance calibration of UAV-based visible and near-infrared digital images acquired under variant altitude and illumination conditions. Remote Sens. Appl. Soc. Environ. 2020, 18, 100312. [Google Scholar]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative remote sensing at ultra-high resolution with UAV spectroscopy: A review of sensor technology, measurement procedures, and data correction workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef]
- Feng, A.; Zhou, J.; Vories, E.D.; Sudduth, K.A.; Zhang, M. Yield estimation in cotton using UAV-based multi-sensor imagery. Biosyst. Eng. 2020, 193, 101–114. [Google Scholar] [CrossRef]
- Zhou, J.; Khot, L.R.; Boydston, R.A.; Miklas, P.N.; Porter, L. Low altitude remote sensing technologies for crop stress monitoring: A case study on spatial and temporal monitoring of irrigated pinto bean. Precis. Agric. 2018, 19, 555–569. [Google Scholar] [CrossRef]
- Zhao, T.; Stark, B.; Chen, Y.; Ray, A.L.; Doll, D. A detailed field study of direct correlations between ground truth crop water stress and normalized difference vegetation index (NDVI) from small unmanned aerial system (sUAS). In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 520–525. [Google Scholar]
- Haghighattalab, A.; Pérez, L.G.; Mondal, S.; Singh, D.; Schinstock, D.; Rutkoski, J.; Ortiz-Monasterio, I.; Singh, R.P.; Goodin, D.; Poland, J. Application of unmanned aerial systems for high throughput phenotyping of large wheat breeding nurseries. Plant Methods 2016, 12, 35. [Google Scholar] [CrossRef] [PubMed]
- Yang, C. Detection of Rape Canopy SPAD Based on Multispectral Images of Low Altitude Remote Sens.Platform. In Proceedings of the 2017 ASABE Annual International Meeting, Washington, DC, USA, 16–19 July 2017; p. 1. [Google Scholar]
- D’Odorico, P.; Besik, A.; Wong, C.Y.; Isabel, N.; Ensminger, I. High-throughput drone based remote sensing reliably tracks phenology in thousands of conifer seedlings. New Phytol. 2020. [Google Scholar] [CrossRef] [PubMed]
- Chen, A.; Orlov-Levin, V.; Meron, M. Applying high-resolution visible-channel aerial scan of crop canopy to precision irrigation management. Multidiscip. Digit. Publ. Inst. Proc. 2018, 2, 335. [Google Scholar] [CrossRef]
- Motohka, T.; Nasahara, K.N.; Oguma, H.; Tsuchida, S. Applicability of green-red vegetation index for remote sensing of vegetation phenology. Remote Sens. 2010, 2, 2369–2387. [Google Scholar] [CrossRef]
- Cao, Y.; Li, G.L.; Luo, Y.K.; Pan, Q.; Zhang, S.Y. Monitoring of sugar beet growth indicators using wide-dynamic-range vegetation index (WDRVI) derived from UAV multispectral images. Comput. Electron. Agric. 2020, 171, 105331. [Google Scholar] [CrossRef]
- Wang, Y.W.; Reder, N.P.; Kang, S.; Glaser, A.K.; Liu, J.T. Multiplexed optical imaging of tumor-directed nanoparticles: A review of imaging systems and approaches. Nanotheranostics 2017, 1, 369. [Google Scholar] [CrossRef]
- Coulter, D.; Hauff, P.; Kerby, W. Airborne hyperspectral remote sensing. In Proceedings of the 5th Decennial International Conference on Mineral Exploration, Toronto, ON, Canada, 9–12 Septembar 2007; pp. 375–378. [Google Scholar]
- Barbieux, K. Pushbroom hyperspectral data orientation by combining feature-based and area-based co-registration techniques. Remote Sens. 2018, 10, 645. [Google Scholar] [CrossRef]
- Habib, A.; Han, Y.; Xiong, W.; He, F.; Zhang, Z.; Crawford, M. Automated ortho-rectification of UAV-based hyperspectral data over an agricultural field using frame RGB imagery. Remote Sens. 2016, 8, 796. [Google Scholar] [CrossRef]
- Saxton, K.E.; Rawls, W.J. Soil water characteristic estimates by texture and organic matter for hydrologic solutions. Soil Sci. Soc. Am. J. 2006, 70, 1569–1578. [Google Scholar] [CrossRef]
- Sudduth, K.A.; Kitchen, N.; Bollero, G.; Bullock, D.; Wiebold, W. Comparison of electromagnetic induction and direct sensing of soil electrical conductivity. Agron. J. 2003, 95, 472–482. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Szeliski, R. Image alignment and stitching: A tutorial. Found. Trends Comput. Graph. Vis. 2007, 2, 1–104. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Luo, J.; Gwun, O. SURF applied in panorama image stitching. In Proceedings of the 2010 2nd International Conference on Image Processing Theory, Tools and Applications, Paris, France, 7–10 July 2010; pp. 495–499. [Google Scholar]
- Bradski, G. The opencv library. Dr Dobb’s J. Softw. Tools 2000, 25, 120–125. [Google Scholar]
- Katsoulas, N.; Elvanidi, A.; Ferentinos, K.P.; Kacira, M.; Bartzanas, T.; Kittas, C. Crop reflectance monitoring as a tool for water stress detection in greenhouses: A review. Biosyst. Eng. 2016, 151, 374–398. [Google Scholar] [CrossRef]
- Yue, J.; Yang, G.; Li, C.; Li, Z.; Wang, Y.; Feng, H.; Xu, B. Estimation of winter wheat above-ground biomass using unmanned aerial vehicle-based snapshot hyperspectral sensor and crop height improved models. Remote Sens. 2017, 9, 708. [Google Scholar] [CrossRef]
- Duan, T.; Zheng, B.; Guo, W.; Ninomiya, S.; Guo, Y.; Chapman, S.C. Comparison of ground cover estimates from experiment plots in cotton, sorghum and sugarcane based on images and ortho-mosaics captured by UAV. Funct. Plant Biol. 2017, 44, 169–183. [Google Scholar] [CrossRef]
- Wilhelm, B.; Mark, J.B. Principles of Digital Image Processing: Core Algorithms; Springer: New York, NY, USA, 2009. [Google Scholar]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning; Springer: New York, NY, USA, 2013; Volume 112. [Google Scholar]
- Shlens, J. A tutorial on principal component analysis. arXiv 2014, arXiv:1404.1100. [Google Scholar]
- Friedman, J.; Hastie, T.; Tibshirani, R. The Elements of Statistical Learning; Springer series in statistics; Springer: New York, NY, USA, 2001; Volume 1. [Google Scholar]
- Freund, Y.; Schapire, R.E. Experiments with a new boosting algorithm. In Proceedings of the International Conference on Machine Learning, Bari, Italy, 3–6 July 1996; pp. 148–156. [Google Scholar]
- Sammut, C.; Webb, G.I. Encyclopedia of Machine Learning; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Chawla, N.V. Data mining for imbalanced datasets: An overview. In Data Mining and Knowledge Discovery Handbook; Springer: Berlin, Germany, 2009; pp. 875–886. [Google Scholar]
- Hulugalle, N.; Weaver, T.; Finlay, L.; Hare, J.; Entwistle, P. Soil properties and crop yields in a dryland Vertisol sown with cotton-based crop rotations. Soil Tillage Res. 2007, 93, 356–369. [Google Scholar] [CrossRef]
- Celik, A.; Ozturk, I.; Way, T. Effects of various planters on emergence and seed distribution uniformity of sunflower. Appl. Eng. Agric. 2007, 23, 57–61. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Ritchie, G.L.; Bednarz, C.W.; Jost, P.H.; Brown, S.M. Cotton Growth and Development; Cooperative Extension Service and the University of Georgia College of Agricultural and Environmental Sciences: Athens, GA, USA, 2007. [Google Scholar]
- Egli, D.; Rucker, M. Seed vigor and the uniformity of emergence of corn seedlings. Crop Sci. 2012, 52, 2774–2782. [Google Scholar] [CrossRef]
- Williams, D.; Britten, A.; McCallum, S.; Jones, H.; Aitkenhead, M.; Karley, A.; Loades, K.; Prashar, A.; Graham, J. A method for automatic segmentation and splitting of hyperspectral images of raspberry plants collected in field conditions. Plant Methods 2017, 13, 74. [Google Scholar] [CrossRef] [PubMed]
- Okamoto, H.; Lee, W.S. Green citrus detection using hyperspectral imaging. Comput. Electron. Agric. 2009, 66, 201–208. [Google Scholar] [CrossRef]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using a random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectral imagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for remote sensing with unmanned aerial vehicles in precision agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J. Hyperspectral imaging: A review on Uav-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Sankey, T.T.; McVay, J.; Swetnam, T.L.; McClaran, M.P.; Heilman, P.; Nichols, M. UAV hyperspectral and lidar data and their fusion for arid and semi-arid land vegetation monitoring. Remote Sens. Ecol. Conserv. 2018, 4, 20–33. [Google Scholar] [CrossRef]
- Cho, M.A.; Skidmore, A.; Corsi, F.; Van Wieren, S.E.; Sobhan, I. Estimation of green grass/herb biomass from airborne hyperspectral imagery using spectral indices and partial least squares regression. Int. J. Appl. Earth Obs. Geoinf. 2007, 9, 414–424. [Google Scholar] [CrossRef]
- Peng, Y.; Zhang, M.; Xu, Z.; Yang, T.; Su, Y.; Zhou, T.; Wang, H.; Wang, Y.; Lin, Y. Estimation of leaf nutrition status in degraded vegetation based on field survey and hyperspectral data. Sci. Rep. 2020, 10, 1–12. [Google Scholar] [CrossRef]
- Forcella, F.; Arnold, R.L.B.; Sanchez, R.; Ghersa, C.M. Modeling seedling emergence. Field Crops Res. 2000, 67, 123–139. [Google Scholar] [CrossRef]
- Ghassemi-Golezani, K.; Dalil, B. Effects of seed vigor on growth and grain yield of maize. Plant Breed. Seed Sci. 2014, 70, 81–90. [Google Scholar] [CrossRef]
- Quintano, C.; Fernández-Manso, A.; Roberts, D.A. Multiple Endmember Spectral Mixture Analysis (MESMA) to map burn severity levels from Landsat images in Mediterranean countries. Remote Sens. Environ. 2013, 136, 76–88. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Hyperspectral vegetation indices and their relationships with agricultural crop characteristics. Remote Sens. Environ. 2000, 71, 158–182. [Google Scholar] [CrossRef]
- Guo, D.; Zhu, Q.; Huang, M.; Guo, Y.; Qin, J. Model updating for the classification of different varieties of maize seeds from different years by hyperspectral imaging coupled with a pre-labeling method. Comput. Electron. Agric. 2017, 142, 1–8. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Crop and Purpose | DAP (Days) | Imaging Height (m) | GSD (cm/pixel) | Performance | Reference |
|---|---|---|---|---|---|---|
| RGB | Wheat, uniformity | 110 and 111 | 7 | 0.06 | RMSE = 0.44–3.99 | [6] |
| RGB | Wheat, stand count | 14, 31 and 40 | 3–7 | 0.08–0.18 | RMSE = 14.3% | [8] |
| RGB | Cotton, stand count | 6–11 | 15–20 | 0.63–0.89 | Accuracy = 88.6% | [9] |
| RGB | Corn, stand count | 20 and 23 | 10 | 0.24 | Accuracy = 96.0% | [10] |
| RGB | Rapeseed, stand count | 27–37 | 20 | 0.41 | MAE = 9.8%, MAE = 5.1% | [11] |
| RGB | Rice stand count | 13 | 20 | 0.55 | Accuracy = 93.36% | [12] |
| RGB | Sorghum, population | Not mentioned | 40 | Not mentioned | MAE = 6.7% | [13] |
| RGB | Potato, stand count | 35 | 30 | 0.5 | Accuracy = 96.6% | [14] |
| RGB | Maize, stand count | 3- to 5-leaf stage | 50 | 1.4 | R2 = 0.89 | [15] |
| RGB and Multispectral | Angustifolia seedling detection | 68–92 | 5 | RGB: 0.1, multispectral: 0.46 | Only reported VIs were significant through time | [16] |
| RGB | Angustifolia seedling classification | 1, 25, 68 | 5, 10, 15 | 0.1, 0.26, 0.4 | Accuracy > 80.0% | [17] |
| Multispectral | Wheat, stand count | 40 and 236 | 100 | 3.00 | r = 0.86–0.87 | [18] |
| Multispectral | Potato, stand count | 32, 37 and 43 | 15 | 0.44 | r = 0.82 | [19] |
| Feature | Name | Definition |
|---|---|---|
| F1 | Object area | The total number of pixels of the objects in a ROI |
| F2 | Convex area | Area (number of pixels) of the smallest convex polygon of a ROI |
| F3 | Major axis length | Length (in pixels) of the major axis of the ellipse in a ROI |
| F4 | Minor axis length | Length (in pixels) of the minor axis of the ellipse in a ROI |
| F5 | Perimeter | The perimeter (in pixels) of a ROI |
| F6 | Area-perimeter ratio | The ratio of object area within ROI to its perimeter |
| F7 | Aspect ratio | The ratio of width to height of the bounding box of a ROI |
| F8 | Extent | Ratio of object area to the pixels of the bounding box |
| F9 | Solidity | Ratio of the object area to convex area |
| F10 | Eccentricity | Eccentricity of the ellipse that has the same second-moment as the ROI |
| F11 | Equivalent diameter | Diameter of a circle with the same area as the ROI |
| Sample Points | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | Average/std |
|---|---|---|---|---|---|---|---|---|---|---|---|
| CubeCreator | 164.0 | 165.0 | 165.0 | 165.7 | 185.4 | 186.0 | 187.1 | 197.6 | 198.0 | 197.2 | 181.1 ± 13.9 |
| This study | 3.6 | 3.2 | 2.9 | 3.5 | 2.6 | 2.3 | 2.4 | 2.6 | 2.7 | 2.6 | 2.8 ± 0.4 |
| Feature | F1 | F2 | F3 | F4 | F5 | F6 | F7 | F8 | F9 | F10 | F11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 * | 1.00 | ||||||||||
| F2 * | 0.99§ | 1.00 | |||||||||
| F3 * | 0.94 | 0.97 | 1.00 | ||||||||
| F4 | 0.78 | 0.75 | 0.62 | 1.00 | |||||||
| F5 * | 0.94 | 0.97 | 0.97 | 0.75 | 1.00 | ||||||
| F6 | 0.30 | 0.29 | 0.29 | 0.21 | 0.28 | 1.00 | |||||
| F7 | –0.53 | –0.53 | –0.54 | –0.48 | –0.56 | –0.17 | 1.00 | ||||
| F8 | –0.37 | –0.43 | –0.47 | –0.37 | –0.52 | –0.11 | 0.27 | 1.00 | |||
| F9 | –0.47 | –0.56 | –0.62 | –0.47 | –0.69 | –0.16 | 0.41 | 0.78 | 1.00 | ||
| F10 | 0.35 | 0.39 | 0.53 | –0.08 | 0.41 | 0.24 | –0.22 | –0.29 | –0.37 | 1.00 | |
| F11 * | 0.97 | 0.95 | 0.91 | 0.87 | 0.94 | 0.30 | –0.58 | –0.41 | –0.53 | 0.32 | 1.00 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, A.; Zhou, J.; Vories, E.; Sudduth, K.A. Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms. Remote Sens. 2020, 12, 1764. https://doi.org/10.3390/rs12111764
Feng A, Zhou J, Vories E, Sudduth KA. Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms. Remote Sensing. 2020; 12(11):1764. https://doi.org/10.3390/rs12111764
Chicago/Turabian StyleFeng, Aijing, Jianfeng Zhou, Earl Vories, and Kenneth A. Sudduth. 2020. "Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms" Remote Sensing 12, no. 11: 1764. https://doi.org/10.3390/rs12111764
APA StyleFeng, A., Zhou, J., Vories, E., & Sudduth, K. A. (2020). Evaluation of Cotton Emergence Using UAV-Based Narrow-Band Spectral Imagery with Customized Image Alignment and Stitching Algorithms. Remote Sensing, 12(11), 1764. https://doi.org/10.3390/rs12111764