Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives

 , , , , , , , , , , and
, , , , , , , , , , and 
Abstract
1. Introduction
1.1. Scientific and Operational Requirements
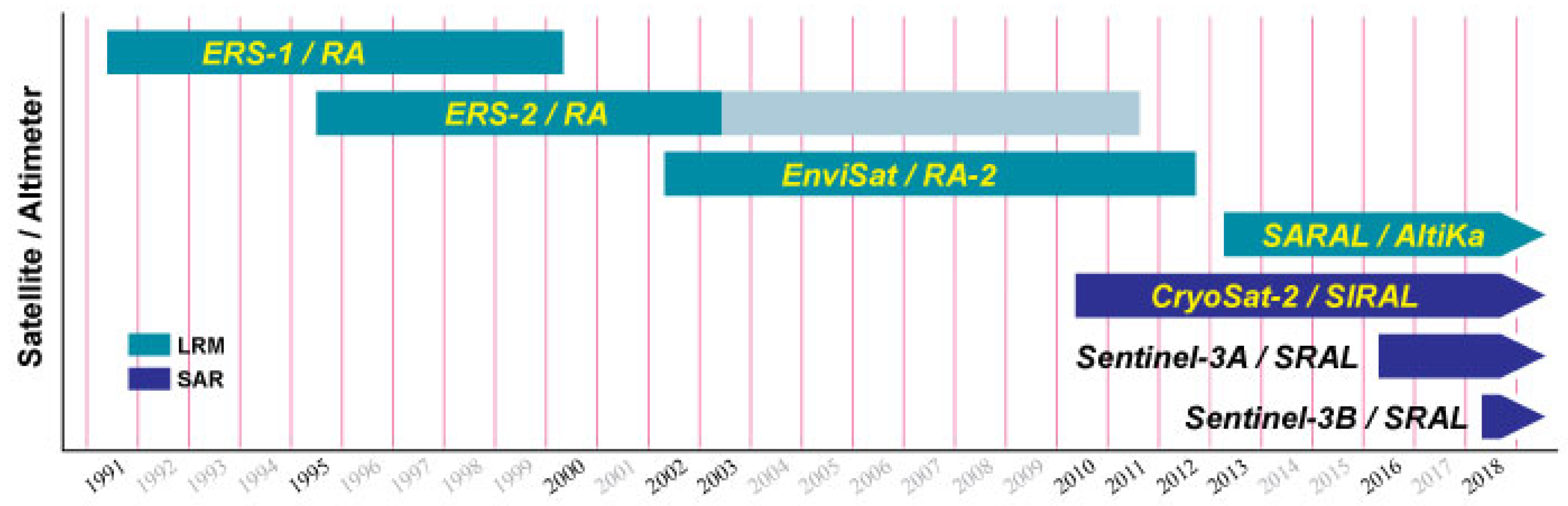
1.2. Relevant Altimeter Datasets
2. Waveform Discrimination
2.1. LRM Altimeters
2.1.1. Classical Techniques
2.1.2. Statistical Techniques
2.2. SAR Altimeters
2.2.1. Power-Based Methods
2.2.2. RIP and Waveform Shape-Based Methods
2.2.3. Statistical Techniques
2.3. Validation of Discrimination
2.3.1. Validation with Optical Sensors
2.3.2. Validation with SAR
2.3.3. Validation Through Dedicated Aircraft Campaigns
3. Waveform Retracking
3.1. Waveform Retracking for Ice Floes
3.1.1. LRM Retracking for Ice Floes
3.1.2. Empirical SAR Waveform Retracking for Ice Floes
3.1.3. Physical SAR waveform Retracking for Ice Floes
3.2. Waveform Retracking for Leads
3.2.1. LRM Model for Leads
3.2.2. SAR Retracking for Leads
3.3. Unified Models for Physical Retracking
3.4. Quality Control: Further Editing of Data
3.4.1. Snagging Effect Within Altimeter Data
3.4.2. Azimuth Ambiguity Effect Within SAR Data
3.4.3. Ensuring Consistency in Space and Time
4. Corrections and References Needed for Inferring Precise Geophysical Values
4.1. Determining Sea Level
4.1.1. Atmospheric Corrections
4.1.2. Tides and Mean Sea Surface
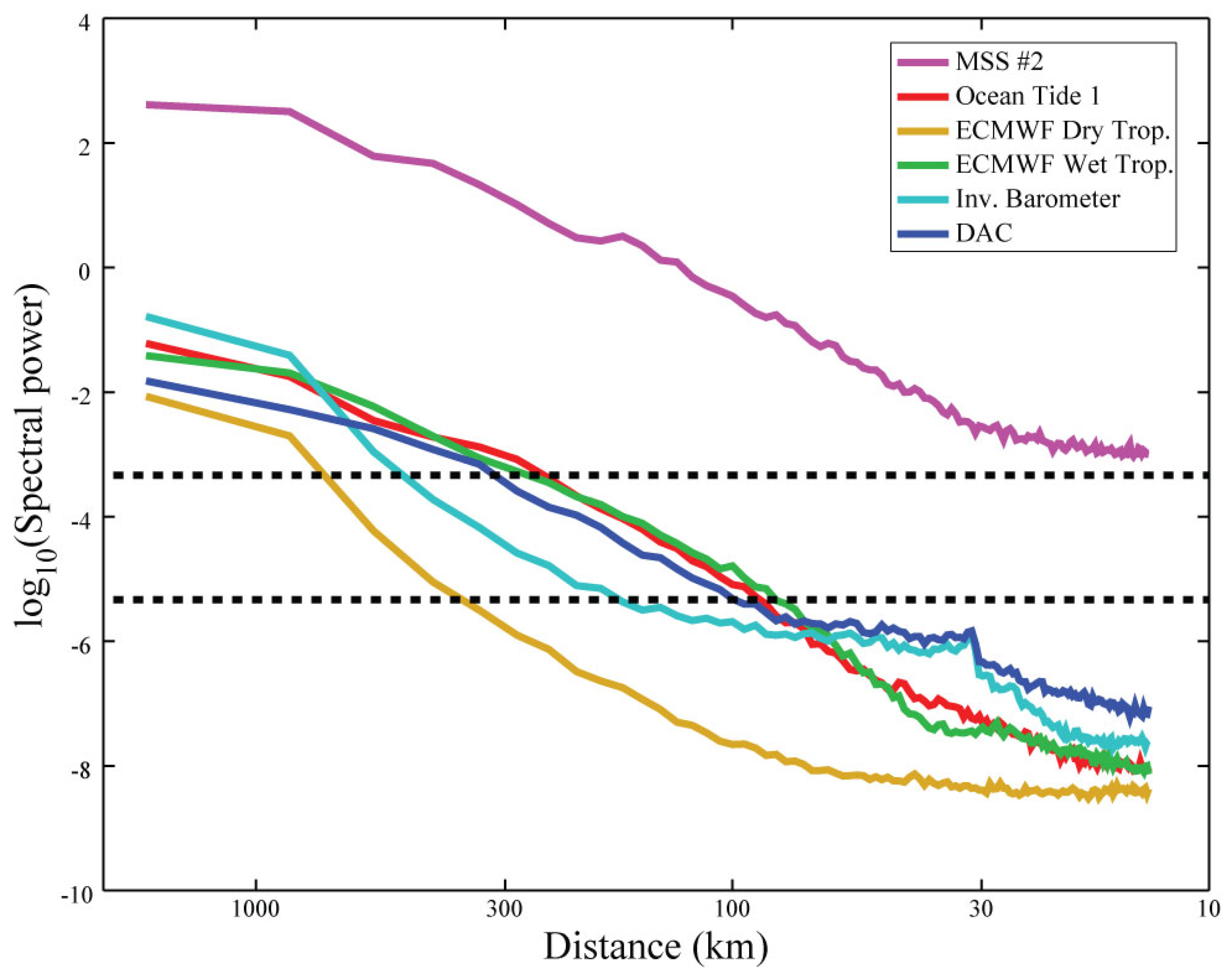
4.1.3. Amplitude and Scale Length of Corrections
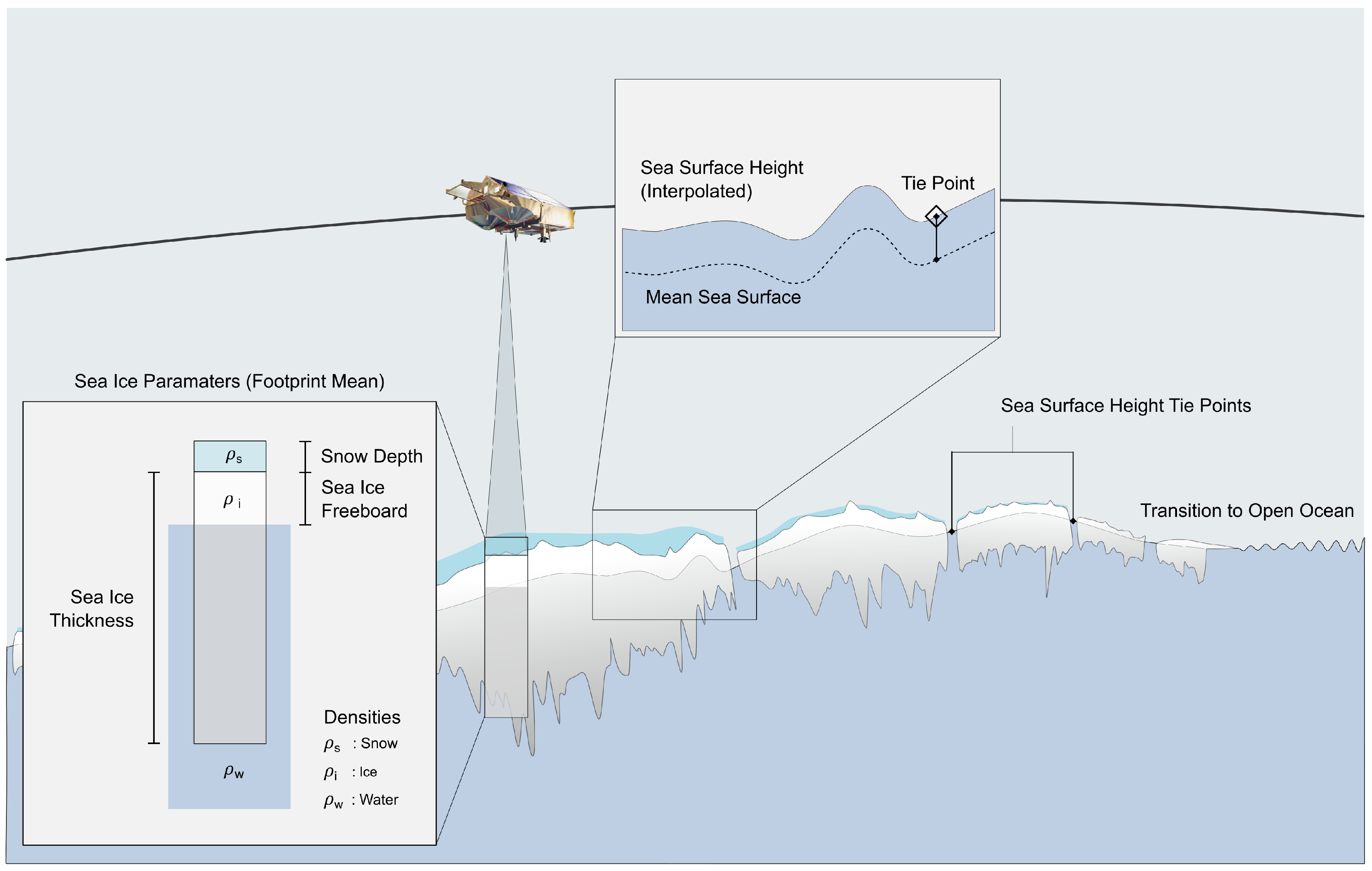
4.2. Determining Freeboard and Ice Thickness
4.2.1. Interpolating Sea Level Anomaly and Calculating Freeboard
4.2.2. Freeboard to Thickness Conversions
4.2.3. Impact of Snow on Sea-Ice Freeboard and Thickness Retrievals
5. Comparison With In Situ and Airborne Measurements
5.1. Sea Level and Currents
5.2. Freeboard and Sea-Ice Thickness
5.2.1. Freeboard
5.2.2. Sea-Ice Thickness (SIT)
5.2.3. Validation of Algorithms
6. Future Prospects: Expectations and Hopes
6.1. Improvements in Processing
6.2. New Missions with New Capabilities
6.3. Realizing the Potential of SAR Interferometry (SARin)
6.4. Utilising Data Fusion Techniques
6.5. Enhanced in Situ Observations
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADCP | Acoustic Doppler Current Profiler | mss | mean square slope |
| AEM | Airborne ElectroMagnetic sensor | MSS | Mean Sea Surface |
| AGC | Automatic Gain Control | MWR | Microwave Radiometer |
| ALES | Adaptive Leading Edge Sub-waveform | MYI | Multi-Year Ice |
| ALOS | Advanced Land Observation Satellite | NN | Neural Net |
| ATM | Airborne Topographic Mapper | NSIDC | National Snow and Ice Data Center |
| BGEP | Beaufort Gyre Exploration Project | OCOG | Offset Centre-Of-Gravity |
| BH | Brown-Hayne | OIB | Operation IceBridge |
| CCI | Climate Change Initiative | OLCI | Ocean and Land Colour Instrument |
| CPOM | Centre for Polar Observation and Modelling | PLRM | Pseudo Low-Rate Measurement |
| CryoVEx | Cryosat Validation Experiment | PP | Pulse Peakiness |
| DAC | Dynamic Atmosphere Correction | PTR | Point Target Response |
| DDA | Delay-Doppler Altimeter | RA | Radar Altimeter |
| DOT | Dynamic Ocean Topography | RIP | Range-Integrated Power |
| DTC | Dry Tropospheric Correction | SAMOSA | SAR Altimetry MOde Studies and Applications |
| ERS | European Remote-sensing Satellite | SAR | Synthetic Aperture Radar |
| Envisat | Environmental Satellite | SARin | SAR interferometry |
| ESA | European Space Agency | S.D. | Standard Deviation |
| FFT | Fast Fourier Transform | SIC | Sea-Ice Concentration |
| FYI | First Year Ice | SIT | Sea-Ice Thickness |
| GDR | Geophysical Data Record | SK | Stack Kurtosis |
| GOCE | Gravity field and steady-state Ocean | SLA | Sea Level Anomaly |
| Circulation Explorer | SMMR | Scanning Multichannel Microwave Radiometer | |
| GRACE | Gravity Recovery and Climate Experiment | SMOS | Soil Moisture and Ocean Salinity |
| ICESat | Ice, Cloud, and land Elevation Satellite | SP | Stack Peakiness |
| IMB | Ice Mass Balance | SRAL | Sentinel-3 Radar Altimeter |
| LEW | Leading Edge Width | SS | Stack Skewness |
| LRM | Low Rate Measurement | SSD | Stack Standard Deviation |
| MDT | Mean Dynamic Topography | SSM/I | Special Sensor Microwave/Imager |
| MERIS | Medium Resolution Imaging Spectrometer | TES | Trailing Edge Slope |
| MODIS | Moderate Resolution Imaging | TFMRA | Threshold First Maximum Retracker Algorithm |
| Spectroradiometer | ULS | Upward-Looking Sonar | |
| MP | Maximal Power | WTC | Wet Tropospheric Correction |
References
- Johannessen, J.; Andersen, O. The high latitudes and polar ocean. In Satellite Altimetry over Oceans and Land Surfaces; Stammer, D., Cazenave, A., Eds.; CRC Press: Boca Raton, FL, USA, 2017; Chapter 8; pp. 271–294. [Google Scholar]
- Gloersen, P.; Campbell, W.J.; Cavalieri, D.J.; Comiso, J.C.; Parkinson, C.L.; Zwally, H.J. Satellite passive microwave observations and analysis of Arctic and Antarctic sea ice, 1978–1987. Ann. Glaciol. 1993, 17, 149–143. [Google Scholar] [CrossRef]
- Perrette, M.; Yool, A.; Quartly, G.D.; Popova, E.E. Near-ubiquity of ice-edge blooms in the Arctic. Biogeoscience 2011, 8, 515–524. [Google Scholar] [CrossRef]
- World Meteorological Organization (WMO). WMO Sea Ice Nomenclature Technical Report; World Meteorological Organization: Geneva, Switzerland, 2014. [Google Scholar]
- AMAP. Snow, Water, Ice and Permafrost in the Arctic (SWIPA) 2017; Technical Report; Arctic Monitoring and Assessment Programme AMAP: Oslo, Norway, 2017; ISBN 978-82-7971-101-8. [Google Scholar]
- Lind, S.; Ingvaldsen, R.B.; Furevik, T. Arctic warming hotspot in the northern Barents Sea linked to declining sea-ice import. Nat. Clim. Chang. 2018, 8, 634–639. [Google Scholar] [CrossRef]
- Barton, B.I.; Lenn, Y.D.; Lique, C. Observed Atlantification of the Barents Sea causes the Polar Front to limit the expansion of winter sea ice. J. Phys. Oceanogr. 2018, 48, 1849–1866. [Google Scholar] [CrossRef]
- Stroeve, J.; Notz, D. Changing state of Arctic sea ice across all seasons. Environ. Res. Lett. 2018, 13, 103001. [Google Scholar] [CrossRef]
- Screen, J.A.; Williamson, D. Ice-free Arctic at 1.5 ∘C? Nat. Clim. Chang. 2017, 7, 230–231. [Google Scholar] [CrossRef][Green Version]
- Jahn, A. Reduced probability of ice-free summers for 1.5 ∘C compared to 2 ∘C warming. Nat. Clim. Chang. 2018, 8, 409–413. [Google Scholar] [CrossRef]
- Rinke, A.; Maslowski, W.; Dethloff, K.; Clement, J. Influence of sea ice on the atmosphere: A study with an Arctic atmospheric regional climate model. J. Geophys. Res. Atmos. 2006, 111, D16. [Google Scholar] [CrossRef]
- Quartly, G.; Legeais, J.F.; Ablain, M.; Zawadzki, L.; Fernandes, M.; Rudenko, S.; Carrère, L.; García, P.N.; Cipollini, P.; Andersen, O.; et al. A new phase in the production of quality-controlled sea level data. Earth Syst. Sci. Data 2017, 9, 557–572. [Google Scholar] [CrossRef]
- Legeais, J.F.; Ablain, M.; Zawadzki, L.; Zuo, H.; Johannessen, J.A.; Scharffenberg, M.G.; Fenoglio-Marc, L.; Fernandes, M.J.; Andersen, O.B.; Rudenko, S.; et al. An improved and homogeneous altimeter sea level record from the ESA Climate Change Initiative. Earth Syst. Sci. Data 2018, 10, 281–301. [Google Scholar] [CrossRef]
- Paul, S.; Hendricks, S.; Ricker, R.; Kern, S.; Rinne, E. Empirical parametrization of Envisat freeboard retrieval of Arctic and Antarctic sea ice based on CryoSat-2: progress in the ESA Climate Change Initiative. Cryosphere 2018, 12, 2437–2460. [Google Scholar] [CrossRef]
- GCOS. Systematic Observation Requirements for Satellite-Based Data Products for Climate. 2011 Update; Technical Report; GCOS: 2011. Available online: http://cci.esa.int/sites/default/files/gcos-154.pdf (accessed on 10 April 2019).
- Proshutinsky, A.; Ashik, I.M.; Dvorkin, E.N.; Häkkinen, S.; Krishfield, R.A.; Peltier, W.R. Secular sea level change in the Russian sector of the Arctic Ocean. J. Geophys. Res. Oceans 2004, 109, C3. [Google Scholar] [CrossRef]
- Proshutinsky, A.; Dukhovskoy, D.; Timmermans, M.L.; Krishfield, R.; Bamber, J.L. Arctic circulation regimes. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2015, 373. [Google Scholar] [CrossRef]
- Kwok, R.; Rothrock, D.A. Decline in Arctic sea ice thickness from submarine and ICESat records: 1958–2008. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- Cavalieri, D.; Parkinson, C.; Gloersen, P.; Zwally, H. Sea Ice Concentrations from Nimbus-7 SMMR and DMSP SSM/I-SSMIS Passive Microwave Data, Version 1. Dataset 0051. Available online: https://nsidc.org/data/NSIDC-0051/versions/1 (accessed on 10 April 2019).
- Chelton, D.B.; deSzoeke, R.A.; Schlax, M.G.; El Naggar, K.; Siwertz, N. Geographical variability of the first baroclinic Rossby radius of deformation. J. Phys. Oceanogr. 1998, 28, 433–460. [Google Scholar] [CrossRef]
- ISO. ISO19906:2010 Petroleum and Natural Gas Industries–Arctic Offshore Structures; Technical Report; ISO: Geneva, Switzerland, 2010. [Google Scholar]
- IMO. International Maritime Organization Polar Code; Technical Report; IMO: London, UK, 2017. [Google Scholar]
- Chelton, D.B.; Walsh, E.J.; MacArthur, J.L. Pulse compression and sea level tracking in satellite altimetry. J. Atmos. Ocean. Technol. 1989, 6, 407–438. [Google Scholar] [CrossRef]
- Steunou, N.; Desjonquères, J.D.; Picot, N.; Sengenes, P.; Noubel, J.; Poisson, J.C. AltiKa altimeter: Instrument description and in flight performance. Mar. Geodesy 2015, 38, 22–42. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Wingham, D.; Francis, C.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Brown, G. The average impulse response of a rough surface and its applications. IEEE Trans. Antennas Propag. 1977, 25, 67–74. [Google Scholar] [CrossRef]
- Hayne, G. Radar altimeter mean return waveforms from near-normal-incidence ocean surface scattering. IEEE Trans. Antennas Propag. 1980, 28, 687–692. [Google Scholar] [CrossRef]
- Amarouche, L.; Thibaut, P.; Zanife, O.; Dumont, J.P.; Vincent, P.; Steunou, N. Improving the Jason-1 ground retracking to better account for attitude effects. Mar. Geodesy 2004, 27, 171–197. [Google Scholar] [CrossRef]
- Laxon, S.W. Sea ice extent mapping using the ERS-1 radar altimeter. Adv. Remote Sens. 1994, 3, 112–116. [Google Scholar]
- Zakharova, E.A.; Fleury, S.; Guerreiro, K.; Willmes, S.; Rémy, F.; Kouraev, A.V.; Heinemann, G. Sea ice leads detection using SARAL/AltiKa altimeter. Mar. Geodesy 2015, 38, 522–533. [Google Scholar] [CrossRef]
- Laxon, S.W.; Peacock, N.; Smith, D. High interannual variability of sea ice thickness in the Arctic region. Nature 2003, 425, 947–950. [Google Scholar] [CrossRef]
- Peacock, N.R.; Laxon, S.W. Sea surface height determination in the Arctic Ocean from ERS altimetry. J. Geophys. Res. Oceans 2004, 109. [Google Scholar] [CrossRef]
- Poisson, J.C.; Quartly, G.D.; Kurekin, A.A.; Thibaut, P.; Hoang, D.; Nencioli, F. Development of an ENVISAT altimetry processor providing sea level continuity between open ocean and Arctic leads. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5299–5319. [Google Scholar] [CrossRef]
- Lee, S.; Im, J.; Kim, J.; Kim, M.; Shin, M.; Kim, H.C.; Quackenbush, L.J. Arctic sea ice thickness estimation from CryoSat-2 satellite data using machine learning-based lead detection. Remote Sens. 2016, 8, 698. [Google Scholar] [CrossRef]
- Zygmuntowska, M.; Khvorostovsky, K.; Helm, V.; Sandven, S. Waveform classification of airborne synthetic aperture radar altimeter over Arctic sea ice. Cryosphere 2013, 7, 1315–1324. [Google Scholar] [CrossRef]
- Müller, F.L.; Dettmering, D.; Bosch, W.; Seitz, F. Monitoring the Arctic seas: How satellite altimetry can be used to detect open water in sea-ice regions. Remote Sens. 2017, 9, 551. [Google Scholar] [CrossRef]
- Gommenginger, C.; Thibaut, P.; Fenoglio-Marc, L.; Quartly, G.; Deng, X.; Gómez-Enri, J.; Challenor, P.; Gao, Y. Retracking Altimeter Waveforms Near the Coasts. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 61–101. [Google Scholar]
- Dettmering, D.; Wynne, A.; Müller, F.L.; Passaro, M.; Seitz, F. Lead detection in polar oceans—A comparison of different classification methods for Cryosat-2 SAR data. Remote Sens. 2018, 10, 1190. [Google Scholar] [CrossRef]
- Longépé, N.; Thibaut, P.; Vadaine, R.; Poisson, J.; Guillot, A.; Boy, F.; Picot, N.; Borde, F. Comparative evaluation of sea ice lead detection based on SAR imagery and altimeter data. IEEE Trans. Geosci. Remote Sens. 2019. accepted. [Google Scholar]
- Wernecke, A.; Kaleschke, L. Lead detection in Arctic sea ice from CryoSat-2: Quality assessment, lead area fraction and width distribution. Cryosphere 2015, 9, 1955–1968. [Google Scholar] [CrossRef]
- Passaro, M.; Müller, F.L.; Dettmering, D. Lead detection using Cryosat-2 delay-doppler processing and Sentinel-1 SAR images. Adv. Space Res. 2017, 62, 1610–1625. [Google Scholar] [CrossRef]
- Ricker, R.; Hendricks, S.; Beckers, J.F. The impact of geophysical corrections on sea-ice freeboard retrieved from satellite altimetry. Remote Sens. 2016, 8, 317. [Google Scholar] [CrossRef]
- Shen, X.; Zhang, J.; Zhang, X.; Meng, J.; Ke, C. Sea ice classification using Cryosat-2 altimeter data by optimal classifier-feature assembly. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1948–1952. [Google Scholar] [CrossRef]
- Lindsay, R.W.; Rothrock, D.A. Arctic sea ice leads from advanced very high resolution radiometer images. J. Geophys. Res. Oceans 1995, 100, 4533–4544. [Google Scholar] [CrossRef]
- Willmes, S.; Heinemann, G. Sea-ice wintertime lead frequencies and regional characteristics in the Arctic, 2003–2015. Remote Sens. 2016, 8, 4. [Google Scholar] [CrossRef]
- Marcq, S.; Weiss, J. Influence of sea ice lead-width distribution on turbulent heat transfer between the ocean and the atmosphere. Cryosphere 2012, 6, 143–156. [Google Scholar] [CrossRef]
- Guerreiro, K.; Fleury, S.; Zakharova, E.; Kouraev, A.; Rémy, F.; Maisongrande, P. Comparison of CryoSat-2 and ENVISAT radar freeboard over Arctic sea ice: Toward an improved Envisat freeboard retrieval. Cryosphere 2017, 11, 2059–2073. [Google Scholar] [CrossRef]
- Tilling, R.L.; Ridout, A.; Shepherd, A. Estimating Arctic sea ice thickness and volume using CryoSat-2 radar altimeter data. Adv. Space Res. 2018, 62, 1203–1225. [Google Scholar] [CrossRef]
- Hakkinen, S.; Proshutinsky, A.; Ashik, I. Sea ice drift in the Arctic since the 1950s. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Johannessen, O.M.; Campbell, W.J.; Shuchman, R.; Sandven, S.; Gloersen, P.; Johannessen, J.A.; Josberger, E.G.; Haugan, P.M. Microwave Study Programs of Air–Ice–Ocean Interactive Orocesses in the Seas. In Microwave Remote Sensing of Sea Ice; American Geophysical Union (AGU): Washington, DC, USA, 2013; Chapter 13; pp. 261–289. [Google Scholar]
- Laxon, S.W.; Giles, K.A.; Ridout, A.L.; Wingham, D.J.; Willatt, R.; Cullen, R.; Kwok, R.; Schweiger, A.; Zhang, J.; Haas, C.; et al. CryoSat-2 estimates of Arctic sea ice thickness and volume. Geophys. Res. Lett. 2013, 40, 732–737. [Google Scholar] [CrossRef]
- Laxon, S.W.C. Satellite radar Altimetry Over Sea Ice. Ph.D. Thesis, University College London, London, UK, 1989. [Google Scholar]
- Laxon, S. Sea ice altimeter processing scheme at the EODC. Int. J. Remote Sens. 1994, 15, 915–924. [Google Scholar] [CrossRef]
- Dierking, W. Sea Ice Monitoring by Synthetic Aperture Radar. Oceanography 2013, 26, 100–111. [Google Scholar] [CrossRef]
- Ricker, R.; Hendricks, S.; Helm, V.; Skourup, H.; Davidson, M. Sensitivity of CryoSat-2 Arctic sea-ice freeboard and thickness on radar-waveform interpretation. Cryosphere 2014, 8, 1607–1622. [Google Scholar] [CrossRef]
- Kurtz, N.T.; Farrell, S.L.; Studinger, M.; Galin, N.; Harbeck, J.P.; Lindsay, R.; Onana, V.D.; Panzer, B.; Sonntag, J.G. Sea ice thickness, freeboard, and snow depth products from Operation IceBridge airborne data. Cryosphere 2013, 7, 1035–1056. [Google Scholar] [CrossRef]
- Onana, V.D.P.; Kurtz, N.T.; Farrell, S.L.; Koenig, L.S.; Studinger, M.; Harbeck, J.P. A sea-ice lead detection algorithm for use with high-resolution airborne visible imagery. IEEE Trans. Geosci. Remote Sens. 2013, 51, 38–56. [Google Scholar] [CrossRef]
- King, J.; Skourup, H.; Hvidegaard, S.M.; Rösel, A.; Gerland, S.; Spreen, G.; Polashenski, C.; Helm, V.; Liston, G.E. Comparison of freeboard retrieval and ice thickness calculation from ALS, ASIRAS, and CryoSat-2 in the Norwegian Arctic to field measurements made during the N-ICE2015 expedition. J. Geophys. Res. Oceans 2018, 123, 1123–1141. [Google Scholar] [CrossRef]
- Connor, L.N.; Laxon, S.W.; Ridout, A.L.; Krabill, W.B.; McAdoo, D.C. Comparison of Envisat radar and airborne laser altimeter measurements over Arctic sea ice. Remote Sens. Environ. 2009, 113, 563–570. [Google Scholar] [CrossRef]
- Fu, L.L.; Cazenave, A. Satellite Altimetry and Earth Sciences; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Kurtz, N.T.; Galin, N.; Studinger, M. An improved CryoSat-2 sea ice freeboard retrieval algorithm through the use of waveform fitting. Cryosphere 2014, 8, 1217–1237. [Google Scholar] [CrossRef]
- Scott, R.; Baker, S.; Birkett, C.; Cudlip, W.; Laxon, S.; Mantripp, D.; Mansley, J.; Morley, J.; Rapley, C.; Ridley, J.; Strawbridge, F.; Wingham, D. A comparison of the performance of the ice and ocean tracking modes of the ERS-1 radar altimeter over non-ocean surfaces. Geophys. Res. Lett. 1994, 21, 553–556. [Google Scholar] [CrossRef]
- Bamber, J. Ice sheet altimeter processing scheme. Int. J. Remote Sens. 1994, 15, 925–938. [Google Scholar] [CrossRef]
- Giles, K.A.; Laxon, S.W.; Ridout, A.L. Circumpolar thinning of Arctic sea ice following the 2007 record ice extent minimum. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Schwegmann, S.; Rinne, E.; Ricker, R.; Hendricks, S.; Helm, V. About the consistency between Envisat and CryoSat-2 radar freeboard retrieval over Antarctic sea ice. Cryosphere 2016, 10, 1415–1425. [Google Scholar] [CrossRef]
- Helm, V.; Humbert, A.; Miller, H. Elevation and elevation change of Greenland and Antarctica derived from CryoSat-2. Cryosphere 2014, 8, 1539–1559. [Google Scholar] [CrossRef]
- Armitage, T.W.K.; Davidson, M.W.J. Using the interferometric capabilities of the ESA CryoSat-2 mission to improve the accuracy of sea ice freeboard retrievals. IEEE Trans. Geosci. Remote Sens. 2014, 52, 529–536. [Google Scholar] [CrossRef]
- Hendricks, S.; Ricker, R.; Helm, V. AWI CryoSat-2 sea Ice Thickness Data Product; Data Product Manual; Alfred Wegener Institute: Bremerhaven, Germany, 2016. [Google Scholar]
- Ricker, R.; Hendricks, S.; Kaleschke, L.; Tian-Kunze, X.; King, J.; Haas, C. A weekly Arctic sea-ice thickness data record from merged CryoSat-2 and SMOS satellite data. Cryosphere 2017, 11, 1607–1623. [Google Scholar] [CrossRef]
- Kwok, R. Simulated effects of a snow layer on retrieval of CryoSat-2 sea ice freeboard. Geophys. Res. Lett. 2014, 41, 5014–5020. [Google Scholar] [CrossRef]
- Kwok, R.; Cunningham, G.F. Variability of Arctic sea ice thickness and volume from CryoSat-2. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 2015, 373. [Google Scholar] [CrossRef]
- Ray, C.; Martin-Puig, C.; Clarizia, M.P.; Ruffini, G.; Dinardo, S.; Gommenginger, C.; Benveniste, J. SAR altimeter backscattered waveform model. IEEE Trans. Geosci. Remote Sens. 2015, 53, 911–919. [Google Scholar] [CrossRef]
- Ray, C.; Roca, M.; Martin-Puig, C.; Escolà, R.; Garcia, A. Amplitude and dilation compensation of the SAR altimeter backscattered power. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2473–2476. [Google Scholar] [CrossRef]
- Jenson, J.R. Radar altimeter gate tracking: Theory and extension. IEEE Trans. Geosci. Remote Sens. 1999, 37, 651–658. [Google Scholar] [CrossRef]
- Smith, W.H.; Scharroo, R. Waveform aliasing in satellite radar altimetry. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1671–1682. [Google Scholar] [CrossRef]
- Giles, K.; Laxon, S.; Wingham, D.; Wallis, D.; Krabill, W.; Leuschen, C.; McAdoo, D.; Manizade, S.; Raney, R. Combined airborne laser and radar altimeter measurements over the Fram Strait in May 2002. Remote Sens. Environ. 2007, 111, 182–194. [Google Scholar] [CrossRef]
- Ivanova, N.; Pedersen, L.T.; Lavergne, T.; Tonboe, R.T.; Rinne, E. Sea Ice Climate Change Initiative Phase 1, Algorithm Theoretical Basis Document (ATBDv2); Technical Report SICCI-ATBDv2-13-09; ESA: Rome, Italy, 2014. [Google Scholar]
- Dinardo, S.; Fenoglio-Marc, L.; Buchhaupt, C.; Becker, M.; Scharroo, R.; Fernandes, M.J.; Benveniste, J. Coastal SAR and PLRM altimetry in German Bight and West Baltic Sea. Adv. Space Res. 2018, 62, 1371–1404. [Google Scholar] [CrossRef]
- Smith, W.H. Spectral windows for satellite radar altimeters. Adv. Space Res. 2018, 62, 1576–1588. [Google Scholar] [CrossRef]
- Armitage, T.W.K.; Ridout, A.L. Arctic sea ice freeboard from AltiKa and comparison with CryoSat-2 and Operation IceBridge. Geophys. Res. Lett. 2015, 42, 6724–6731. [Google Scholar] [CrossRef]
- Jackson, F.; Walton, W.; Hines, D.; Walter, B.; Peng, C. Sea surface mean square slope from Ku-band backscatter data. J. Geophys. Res. Oceans 1992, 97, 11411–11427. [Google Scholar] [CrossRef]
- Passaro, M.; Rose, S.K.; Andersen, O.B.; Boergens, E.; Calafat, F.M.; Dettmering, D.; Benveniste, J. ALES+: Adapting a homogenous ocean retracker for satellite altimetry to sea ice leads, coastal and inland waters. Remote Sens. Environ. 2018, 211, 456–471. [Google Scholar] [CrossRef]
- Passaro, M.; Cipollini, P.; Vignudelli, S.; Quartly, G.D.; Snaith, H.M. ALES: A multi-mission adaptive subwaveform retracker for coastal and open ocean altimetry. Remote Sens. Environ. 2014, 145, 173–189. [Google Scholar] [CrossRef]
- Fleury, S.; Laforge, A.; Guerreiro, K. CryoSat-2 Freeboard Products Inter-Comparison, CryoSeaNice ESA Project WP1420; Technical Report; LEGOS: Toulouse, France, 2017. [Google Scholar]
- Laforge, A.; Fleury, S.; Dinardo, S.; Guerreiro, K.; Remy, F.; Garnier, F.; Verley, J. Inter-comparison of SAR processing options for sea-ice freeboard retrieval. IEEE Trans. Geosci. Remote Sens. 2018. submitted. [Google Scholar]
- Gomez-Enri, J.; Vignudelli, S.; Quartly, G.D.; Gommenginger, C.P.; Cipollini, P.; Challenor, P.G.; Benveniste, J. Modeling Envisat RA-2 waveforms in the coastal zone: Case study of calm water contamination. IEEE Geosci. Remote Sens. Lett. 2010, 7, 474–478. [Google Scholar] [CrossRef]
- Santos da Silva, J.; Calmant, S.; Seyler, F.; Filho, O.C.R.; Cochonneau, G.; Mansur, W.J. Water levels in the Amazon basin derived from the ERS 2 and ENVISAT radar altimetry missions. Remote Sens. Environ. 2010, 114, 2160–2181. [Google Scholar] [CrossRef]
- Maillard, P.; Bercher, N.; Calmant, S. New processing approaches on the retrieval of water levels in Envisat and SARAL radar altimetry over rivers: A case study of the São Francisco River, Brazil. Remote Sens. Environ. 2015, 156, 226–241. [Google Scholar] [CrossRef]
- Quartly, G. Determination of oceanic rain rate and rain cell structure from altimeter waveform data Part I: Theory. J. Atmos. Ocean. Technol. 1998, 15, 1361–1378. [Google Scholar] [CrossRef]
- Scagliola, M.; Tagliani, N.; Fornari, M. Measuring the effective along-track resolution of CryoSat. In Proceedings of the CryoSat Third User Workshop European Space Agency, Dresden, Germany, 12–14 March 2014. [Google Scholar]
- Guerreiro, K.; Fleury, S.; Zakharova, E.; Rémy, F.; Kouraev, A. Potential for estimation of snow depth on Arctic sea ice from CryoSat-2 and SARAL/AltiKa missions. Remote Sens. Environ. 2016, 186, 339–349. [Google Scholar] [CrossRef]
- Carrere, L.; Faugère, Y.; Ablain, M. Major improvement of altimetry sea level estimations using pressure-derived corrections based on ERA-Interim atmospheric reanalysis. Ocean Sci. 2016, 12, 825–842. [Google Scholar] [CrossRef]
- Andersen, O. Global ocean tides from ERS 1 and TOPEX/POSEIDON altimetry. J. Geophys. Res. Oceans 1995, 100, 25249–25259. [Google Scholar] [CrossRef]
- Stammer, D.; Ray, R.; Andersen, O.; Arbic, B.; Bosch, W.; Carrère, L.; Cheng, Y.; Chinn, D.; Dushaw, B.; Egbert, G.; et al. Accuracy assessment of global barotropic ocean tide models. Revi. Geophys. 2014, 52, 243–282. [Google Scholar] [CrossRef]
- Skourup, H.; Farrell, S.L.; Hendricks, S.; Ricker, R.; Armitage, T.W.K.; Ridout, A.; Andersen, O.B.; Haas, C.; Baker, S. An assessment of state-of-the-art mean sea surface and geoid models of the Arctic Ocean: Implications for sea ice freeboard retrieval. J. Geophys. Res. Oceans 2017, 122, 8593–8613. [Google Scholar] [CrossRef]
- Andersen, O.; Stenseng, L.; Piccioni, G.; Knudsen, P. The DTU15 MSS (mean sea surface) and DTU15LAT (lowest astronomical tide) reference surface. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Giles, K.; Laxon, S.; Ridout, A.; Wingham, D.; Bacon, S. Western Arctic Ocean freshwater storage increased by wind-driven spin-up of the Beaufort Gyre. Nat. Geosci. 2012, 5, 194–197. [Google Scholar] [CrossRef]
- Dotto, T.S.; Naveira Garabato, A.; Bacon, S.; Tsamados, M.; Holland, P.R.; Hooley, J.; Frajka-Williams, E.; Ridout, A.; Meredith, M.P. Variability of the Ross Gyre, Southern Ocean: Drivers and Responses Revealed by Satellite Altimetry. Geophys. Res. Lett. 2018, 45, 6195–6204. [Google Scholar] [CrossRef]
- Lawrence, I.R.; Tsamados, M.C.; Stroeve, J.C.; Armitage, T.W.K.; Ridout, A.L. Estimating snow depth over Arctic sea ice from calibrated dual-frequency radar freeboards. Cryosphere 2018, 12, 3551–3564. [Google Scholar] [CrossRef]
- Beaven, S.G.; Lockhart, G.L.; Gogineni, S.P.; Hossetnmostafa, A.R.; Jezek, K.; Gow, A.J.; Perovich, D.K.; Fung, A.K.; Tjuatja, S. Laboratory measurements of radar backscatter from bare and snow-covered saline ice sheets. Int. J. Remote Sens. 1995, 16, 851–876. [Google Scholar] [CrossRef]
- Wadhams, P.; Tucker, W.; Krabill, W.; Swift, J.; Comiso, J.; Davis, N. Relationship between sea ice freeboard and draft in the Arctic Basin, and implications for ice thickness monitoring. J. Geophys. Res. Oceans 1992, 97, 20325–20334. [Google Scholar] [CrossRef]
- Alexandrov, V.; Sandven, S.; Wahlin, J.; Johannessen, O.M. The relation between sea ice thickness and freeboard in the Arctic. Cryosphere 2010, 4, 373–380. [Google Scholar] [CrossRef]
- Kern, S.; Khvorostovsky, K.; Skourup, H.; Rinne, E.; Parsakhoo, Z.S.; Djepa, V.; Wadhams, P.; Sandven, S. The impact of snow depth, snow density and ice density on sea ice thickness retrieval from satellite radar altimetry: Results from the ESA-CCI sea ice ECV project round robin exercise. Cryosphere 2015, 9, 37–52. [Google Scholar] [CrossRef]
- Warren, S.; Rigor, I.; Untersteiner, N.; Radionov, V.; Bryazgin, N.; Aleksandrov, Y.; Colony, R. Snow depth on Arctic sea ice. J. Clim. 1999, 12, 1814–18294. [Google Scholar] [CrossRef]
- Kurtz, N.T.; Farrell, S.L. Large-scale surveys of snow depth on Arctic sea ice from Operation IceBridge. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Webster, M.A.; Rigor, I.G.; Nghiem, S.V.; Kurtz, N.T.; Farrell, S.L.; Perovich, D.K.; Sturm, M. Interdecadal changes in snow depth on Arctic sea ice. J. Geophys. Res. Oceans 2014, 119, 5395–5406. [Google Scholar] [CrossRef]
- Doble, M.J.; Skourup, H.; Wadhams, P.; Geiger, C.A. The relation between Arctic sea ice surface elevation and draft: A case study using coincident AUV sonar and airborne scanning laser. J. Geophys. Res. Oceans 2011, 116. [Google Scholar] [CrossRef]
- Willatt, R.; Laxon, S.; Giles, K.; Cullen, R.; Haas, C.; Helm, V. Ku-band radar penetration into snow cover on Arctic sea ice using airborne data. Ann. Glaciol. 2011, 52, 197–205. [Google Scholar] [CrossRef]
- Tonboe, T.; Andersen, S.; Toudal Pedersen, L. Simulation of the Ku-band radar altimeter sea ice effective scattering surface. IEEE Geosci. Remote Sens. Lett. 2006, 3, 237–240. [Google Scholar] [CrossRef]
- Makynen, M.; Hallikainen, M. Simulation of ASIRAS altimeter echoes for snow-covered first-year sea ice. IEEE Geosci. Remote Sens. Lett. 2018, 6, 486–490. [Google Scholar] [CrossRef]
- Ricker, R.; Hendricks, S.; Perovich, D.K.; Helm, V.; Gerdes, R. Impact of snow accumulation on CryoSat-2 range retrievals over Arctic sea ice: An observational approach with buoy data. Geophys. Res. Lett. 2015, 42, 4447–4455. [Google Scholar] [CrossRef]
- Crocker, G. Observations of the snowcover on sea ice in the Gulf of Bothnia. Int. J. Remote Sens. 1992, 13, 2433–2445. [Google Scholar] [CrossRef]
- Drinkwater, M.R.; Crocker, G. Modelling changes in scattering properties of the dielectric and young snow-covered sea ice at GHz requencies. J. Glaciol. 1988, 34, 274–282. [Google Scholar] [CrossRef]
- Nandan, V.; Geldsetzer, T.; Yackel, J.; Mahmud, M.; Scharien, R.; Howell, S.; King, J.; Ricker, R.; Else, B. Effect of snow salinity on CryoSat-2 Arctic first-year sea ice freeboard measurements. Geophys. Res. Lett. 2017, 44, 10419–10426. [Google Scholar] [CrossRef]
- Laxon, S.; McAdoo, D. Arctic Ocean gravity field derived from ERS-1 satellite altimetry. Science 1994, 265, 621–624. [Google Scholar] [CrossRef]
- Andersen, O.; Knudsen, P.; Stenseng, L. The DTU13 MSS (Mean Sea Surface) and MDT (Mean Dynamic TOpography) from 20 Years of Satellite Altimetry; Jin, S., Barzaghi, R., Eds.; IGFS 2014; Springer International Publishing: Cham, Switzerland, 2015; pp. 111–121. [Google Scholar]
- Andersen, O.B.; Knudsen, P.; Kenyon, S.; Factor, J.; Holmes, S. Global gravity field from recent satellites (DTU15) - Arctic improvements. First Break 2017, 35, 37–40. [Google Scholar]
- Armitage, T.W.K.; Bacon, S.; Ridout, A.L.; Thomas, S.F.; Aksenov, Y.; Wingham, D.J. Arctic sea surface height variability and change from satellite radar altimetry and GRACE, 2003–2014. J. Geophys. Res. Oceans 2016, 121, 4303–4322. [Google Scholar] [CrossRef]
- Peralta-Ferriz, C.; Morison, J.H.; Wallace, J.M.; Bonin, J.A.; Zhang, J. Arctic Ocean circulation patterns revealed by GRACE. J. Clim. 2014, 27, 1445–1468. [Google Scholar] [CrossRef]
- Farrell, S.L.; McAdoo, D.C.; Laxon, S.W.; Zwally, H.J.; Yi, D.; Ridout, A.; Giles, K. Mean dynamic topography of the Arctic Ocean. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Johannessen, J.; Raj, R.; Nilsen, J.; Pripp, T.; Knudsen, P.; Counillon, F.; Stammer, D.; Bertino, L.; Andersen, O.; Serra, N.; et al. Toward improved estimation of the dynamic topography and ocean circulation in the high latitude and Arctic Ocean: The importance of GOCE. Surv. Geophys. 2014, 35, 661–679. [Google Scholar] [CrossRef]
- Kwok, R.; Morison, J. Sea surface height and dynamic topography of the ice-covered oceans from CryoSat-2: 2011–2014. J. Geophys. Res. Oceans 2016, 121, 674–692. [Google Scholar] [CrossRef]
- Koldunov, N.V.; Serra, N.; Köhl, A.; Stammer, D.; Henry, O.; Cazenave, A.; Prandi, P.; Knudsen, P.; Andersen, O.B.; Gao, Y.; Johannessen, J. Multimodel simulations of Arctic Ocean sea surface height variability in the period 1970–2009. J. Geophys. Res. Oceans 2014, 119, 8936–8954. [Google Scholar] [CrossRef]
- Peacock, N.R. Arctic Sea Ice and Ocean Topography from Satellite Altimetry. Ph.D. Thesis, University College London, London, UK, 1999. [Google Scholar]
- Cancet, M.; Andersen, O.; Lyard, F.; Cotton, D.; Benveniste, J. Arctide2017, a high-resolution regional tidal model in the Arctic Ocean. Adv. Space Res. 2018, 62, 1324–1343. [Google Scholar] [CrossRef]
- Holgate, S.J.; Matthews, A.; Woodworth, P.L.; Rickards, L.J.; Tamisiea, M.E.; Bradshaw, E.; Foden, P.R.; Gordon, K.M.; Jevrejeva, S.; Pugh, J. New data systems and products at the Permanent Service for Mean Sea Level. J. Coast. Res. 2013, 29, 493–504. [Google Scholar]
- Armitage, T.; Bacon, S.; Ridout, A.; Petty, A.; Wolbach, S.; Tsamados, M. Arctic Ocean surface geostrophic circulation 2003–2014. Cryosphere 2017, 11, 1767–1780. [Google Scholar] [CrossRef]
- Maheshwari, M.; Mahesh, C.; Rajkumar, K.S.; Pallipad, J.; Rajak, D.R.; Oza, S.R.; Kumar, R.; Sharma, R. Estimation of sea ice freeboard from SARAL/AltiKa data. Mar. Geodesy 2015, 38, 487–496. [Google Scholar] [CrossRef]
- Xia, W.; Xie, H. Assessing three waveform retrackers on sea ice freeboard retrieval from Cryosat-2 using Operation IceBridge airborne altimetry datasets. Remote Sens. Environ. 2018, 204, 456–471. [Google Scholar] [CrossRef]
- Lindsay, R.; Schweiger, A. Arctic sea ice thickness loss determined using subsurface, aircraft, and satellite observations. Cryosphere 2015, 9, 269–283. [Google Scholar] [CrossRef]
- Brockley, D.J.; Baker, S.; Féménias, P.; Martínez, B.; Massmann, F.H.; Otten, M.; Paul, F.; Picard, B.; Prandi, P.; Roca, M.; et al. REAPER: Reprocessing 12 years of ERS-1 and ERS-2 altimeters and microwave radiometer data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5506–5514. [Google Scholar] [CrossRef]
- Tournadre, J. Signature of lighthouses, ships, and small islands in altimeter waveforms. J. Atmos. Ocean. Technol. 2007, 24, 1143–1149. [Google Scholar] [CrossRef]
- Boergens, E.; Dettmering, D.; Schwatke, C.; Seitz, F. Treating the hooking effect in satellite altimetry data: A case study along the Mekong River and its tributaries. Remote Sens. 2016, 8, 91. [Google Scholar] [CrossRef]
- Legresy, B.; Papa, F.; Remy, F.; Vinay, G.; van den Bosch, M.; Zanife, O.Z. ENVISAT radar altimeter measurements over continental surfaces and ice caps using the ICE-2 retracking algorithm. Remote Sens. Environ. 2005, 95, 150–163. [Google Scholar] [CrossRef]
- Tran, N.; Remy, F.; Feng, H.; Femenias, P. Snow facies over ice sheets derived from Envisat active and passive observations. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3694–3708. [Google Scholar] [CrossRef]
- Tran, N.; Girard-Ardhuin, F.; Ezraty, R.; Feng, H.; Femenias, P. Defining a sea ice flag for Envisat altimetry mission. IEEE Geosci. Remote Sens. Lett. 2009, 6, 77–81. [Google Scholar] [CrossRef]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J. Overview of the ICESat mission. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Kwok, R.; Cunningham, G.F.; Zwally, H.J.; Yi, D. Ice, Cloud, and land Elevation Satellite (ICESat) over Arctic sea ice: Retrieval of freeboard. J. Geophys. Res. Oceans 2007, 112. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Wingham, D.; Phalippou, L.; Mavrocordatos, C.; Wallis, D. The mean echo and echo cross product from a beamforming interferometric altimeter and their application to elevation measurement. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2305–2323. [Google Scholar] [CrossRef]
- Abulaitijiang, A.; Andersen, O.B.; Stenseng, L. Coastal sea level from inland CryoSat-2 interferometric SAR altimetry. Geophys. Res. Lett. 2015, 42, 1841–1847. [Google Scholar] [CrossRef]
- García, P.; Martin-Puig, C.; Roca, M. SARin mode, and a window delay approach, for coastal altimetry. Adv. Space Res. 2018, 62, 1358–1370. [Google Scholar] [CrossRef]
- Di Bella, A.; Skourup, H.; Bouffard, J.; Parrinello, T. Uncertainty reduction of Arctic sea ice freeboard from CryoSat-2 interferometric mode. Adv. Space Res. 2018. [Google Scholar] [CrossRef]
- Beckers, J.; Casey, J.; Hendricks, S.; Ricker, R.; Helm, V.; Haas, C. Characteristics of CryoSat-2 signals over multi-year and seasonal sea ice. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 220–223. [Google Scholar]
- Idžanović, M.; Ophaug, V.; Andersen, O.B. Coastal sea level from CryoSat-2 SARIn altimetry in Norway. Adv. Space Res. 2017. [Google Scholar] [CrossRef]
- Skourup, H.; Olesen, A.V.; Sandberg Sørensen, L.; Simonsen, S.; Coccia, A.; Ladkin, R.; Forsberg, R. ESA CryoVEx/EU ICE-ARC 2017 Airborne Field Campaign Data Acquisition Report; Technical Report; ESA Contract Report: 4000120131/17/NL/FF/mg (CCN1), v1.0; ESA: Noordwijk, The Netherlands, 2017. [Google Scholar]
- Kaleschke, L.; Tian-Kunze, X.; Maaß, N.; Mäkynen, M.; Drusch, M. Sea ice thickness retrieval from SMOS brightness temperatures during the Arctic freeze-up period. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Tian-Kunze, X.; Kaleschke, L.; Maaß, N.; Mäkynen, M.; Serra, N.; Drusch, M.; Krumpen, T. SMOS-derived thin sea ice thickness: Algorithm baseline, product specifications and initial verification. Cryosphere 2014, 8, 997–1018. [Google Scholar] [CrossRef]
- MOSAIC. MOSAIC Science Plan; Technical Report; International Arctic Science Committee: Akureyri, Iceland, 2018. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite/Altimeter | Dates | Radar Freq. (GHz) | Band- Width (MHz) | Beam- Width () | Repeat Period (days) | Comments |
|---|---|---|---|---|---|---|
| ERS-1/RA | Jul 1991–Apr 2000 | 13.8 | 330 | 1.3 | 35 | There were also mission phases with 3-day and 168-day repeat orbits. |
| ERS-2/RA | Apr 1995–Jun 2003 | 13.8 | 330 | 1.3 | 35 | Onboard data storage was lost in June 2003; limited direct-relay data was available until July 2011. |
| Envisat/RA-2 | Mar 2002–Apr 2012 | 13.6 3.2 | 320 160 | 1.3 5.5 | 35 | Operation in S-band ceased in Mar. 2008. Changed to a 27-day repeat orbit in Oct. 2010. |
| SARAL / AltiKa | Feb 2013– | 35 | 480 | 0.6 | 35 | Drift orbit from Jul 2016 onwards. |
| CryoSat-2/SIRAL | Apr 2010– | 13.6 | 320 | 1.08 × 1.2 | 369 | Slightly elliptical antenna. Operated in SAR mode over sea ice. |
| Sentinel-3A/SRAL | Feb 2016– | 13.6 5.4 | 350 320 | 1.35 3.4 | 27 | |
| Sentinel-3B/SRAL | Apr 2018– | 13.6 5.4 | 350 320 | 1.35 3.4 | 27 |
| Tidal Constituent | Envisat, AltiKa (35-Day Repeat) | Jason-3, Jason-CS/ Sentinel-6 (9.9156-day) | CryoSat-2 (369-Day Repeat) | Sentinel-3A, -3B (27-day Repeat) | IceSAT-2 (91-Day Repeat) |
|---|---|---|---|---|---|
| M2 | 94.4 | 62.1 | 112.1 | 157.5 | 55.79 |
| S2 | Infinite | 58.7 | Infinite | Infinite | Infinite |
| K1 | 365.25 | 173.1 | 98.1 | 365.25 | 365.25 |
| O1 | 75.1 | 45.1 | 77.1 | 277.0 | 220.1 |
| Correction Component | % Missing | Mean (m) | S.D. (m) |
|---|---|---|---|
| MSS sol.1 (CNES-CLS-15) | 12.8 | 1.72 | 7.13 |
| MSS sol.2 (DTU-15) | 0 | 1.63 | 6.74 |
| Ocean Tide 1 (GOT4.10c) | 0 | 0.0 | 0.07 |
| Ocean Tide 2 (FES2014b) | 0 | 0.0 | 0.08 |
| Loading Tide 1 (GOT4.10c) | 0 | 0.0 | 0.004 |
| Loading Tide 2 (FES2014b) | 0 | 0.0 | 0.005 |
| Solid Earth Tide | 0 | –0.02 | 0.03 |
| Pole Tide | 0 | 0.0 | 0.002 |
| DTC (ECMWF) | 0 | –2.30 | 0.02 |
| WTC (ECMWF) | 0 | –0.08 | 0.03 |
| WTC (MWR) | 0 | –0.21 | 0.12 |
| Iono (Dual Freq.) | 50.4 | 0.08 | 0.27 |
| iono (GIM) | 0.6 | –0.02 | 0.002 |
| Inv. Barometer | 0 | 0.0 | 0.10 |
| High freq. DAC | 0 | 0.0 | 0.05 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quartly, G.D.; Rinne, E.; Passaro, M.; Andersen, O.B.; Dinardo, S.; Fleury, S.; Guillot, A.; Hendricks, S.; Kurekin, A.A.; Müller, F.L.; et al. Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives. Remote Sens. 2019, 11, 881. https://doi.org/10.3390/rs11070881
Quartly GD, Rinne E, Passaro M, Andersen OB, Dinardo S, Fleury S, Guillot A, Hendricks S, Kurekin AA, Müller FL, et al. Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives. Remote Sensing. 2019; 11(7):881. https://doi.org/10.3390/rs11070881
Chicago/Turabian StyleQuartly, Graham D., Eero Rinne, Marcello Passaro, Ole B. Andersen, Salvatore Dinardo, Sara Fleury, Amandine Guillot, Stefan Hendricks, Andrey A. Kurekin, Felix L. Müller, and et al. 2019. "Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives" Remote Sensing 11, no. 7: 881. https://doi.org/10.3390/rs11070881
APA StyleQuartly, G. D., Rinne, E., Passaro, M., Andersen, O. B., Dinardo, S., Fleury, S., Guillot, A., Hendricks, S., Kurekin, A. A., Müller, F. L., Ricker, R., Skourup, H., & Tsamados, M. (2019). Retrieving Sea Level and Freeboard in the Arctic: A Review of Current Radar Altimetry Methodologies and Future Perspectives. Remote Sensing, 11(7), 881. https://doi.org/10.3390/rs11070881