Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece

 ,
,  ,
, 
 ,
,  ,
,  ,
,  ,
, 

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
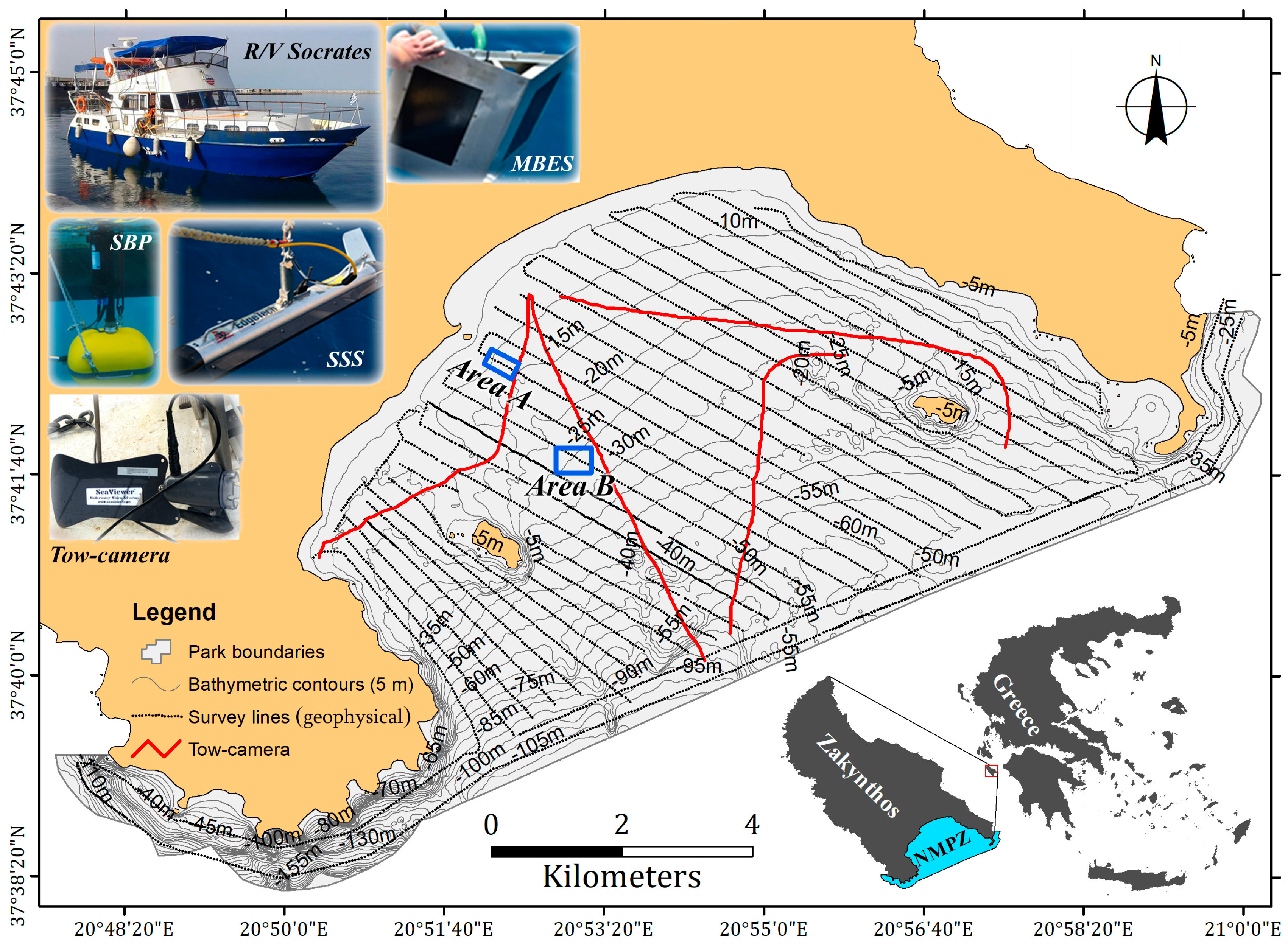
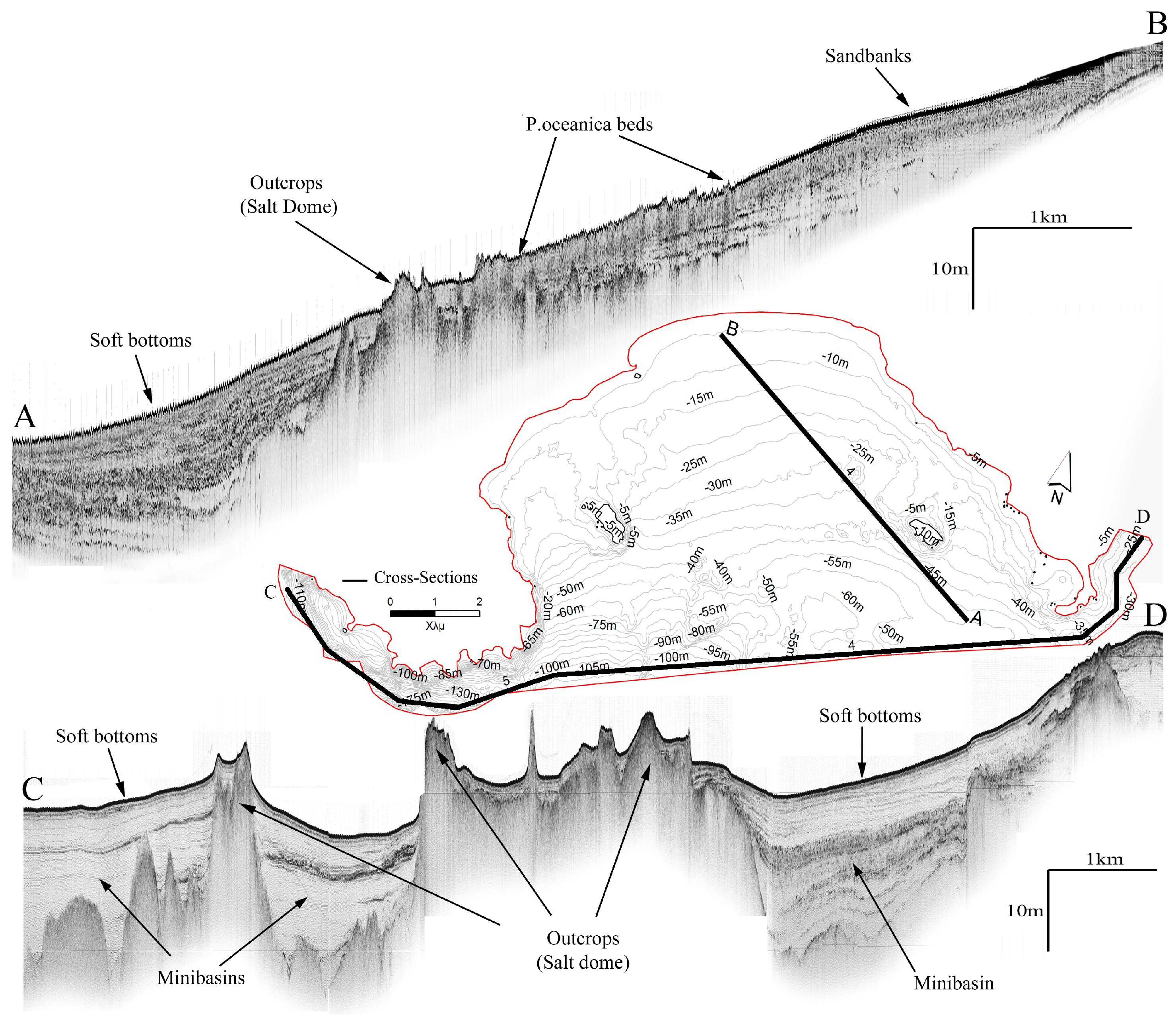
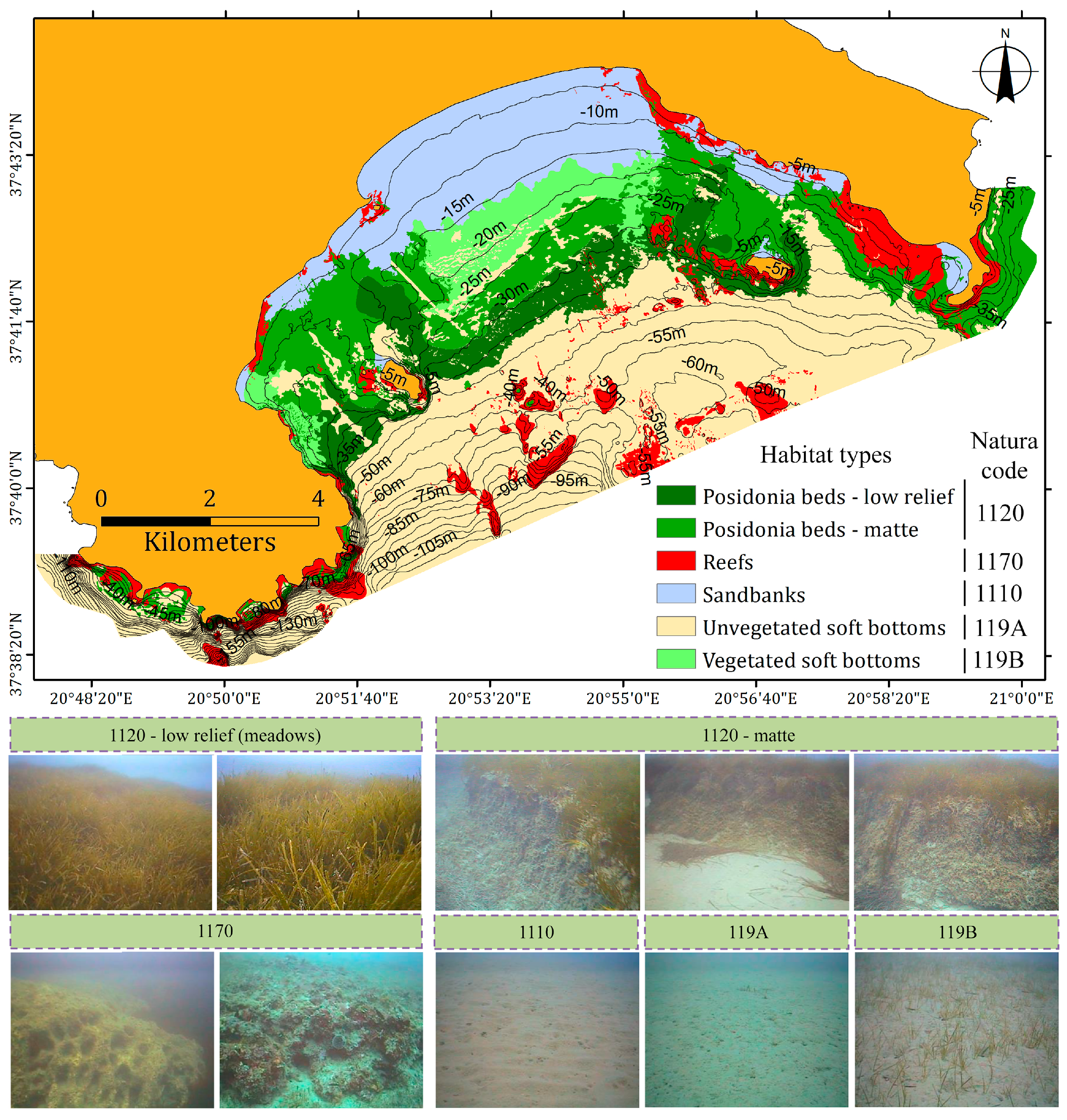
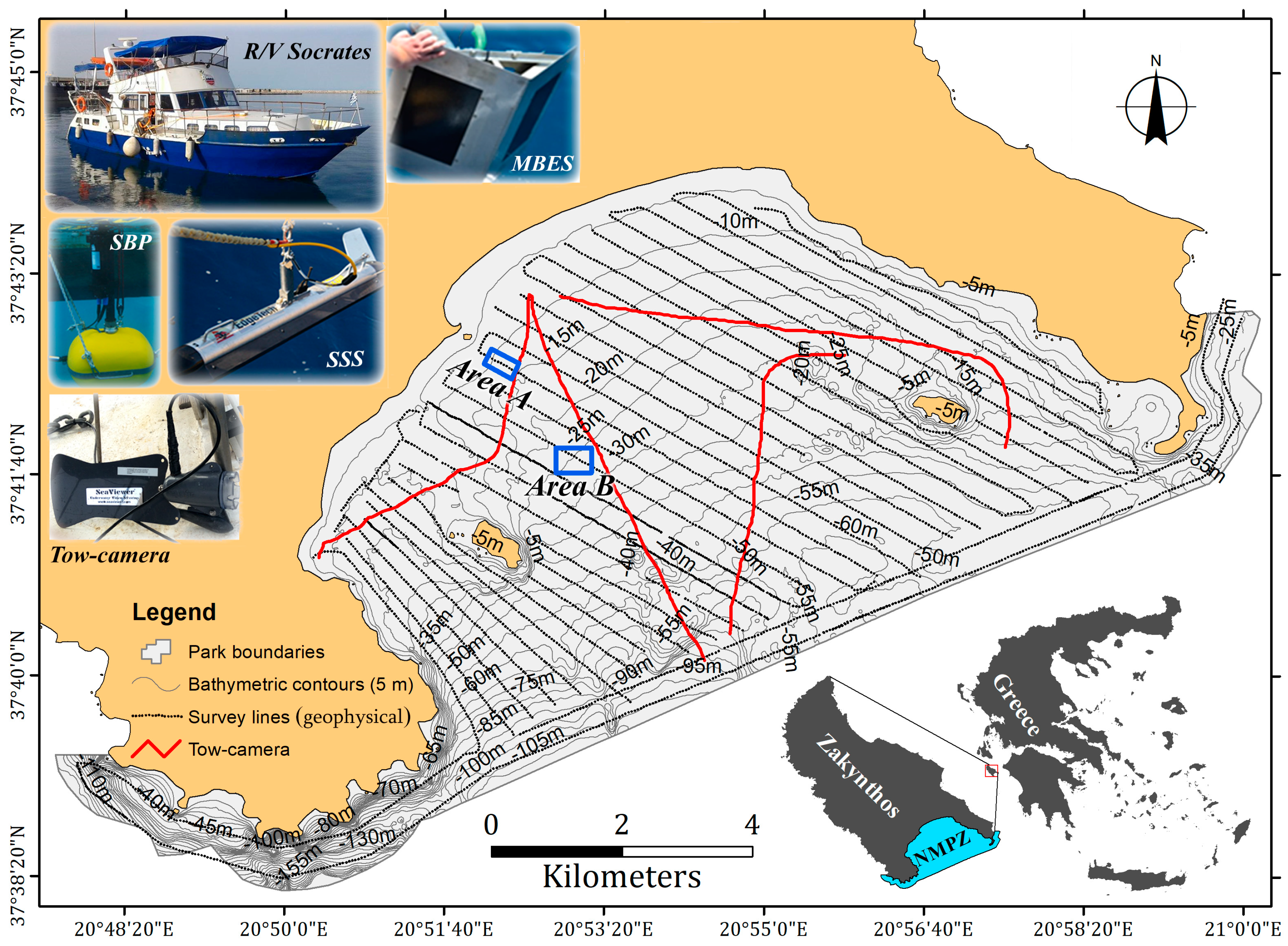
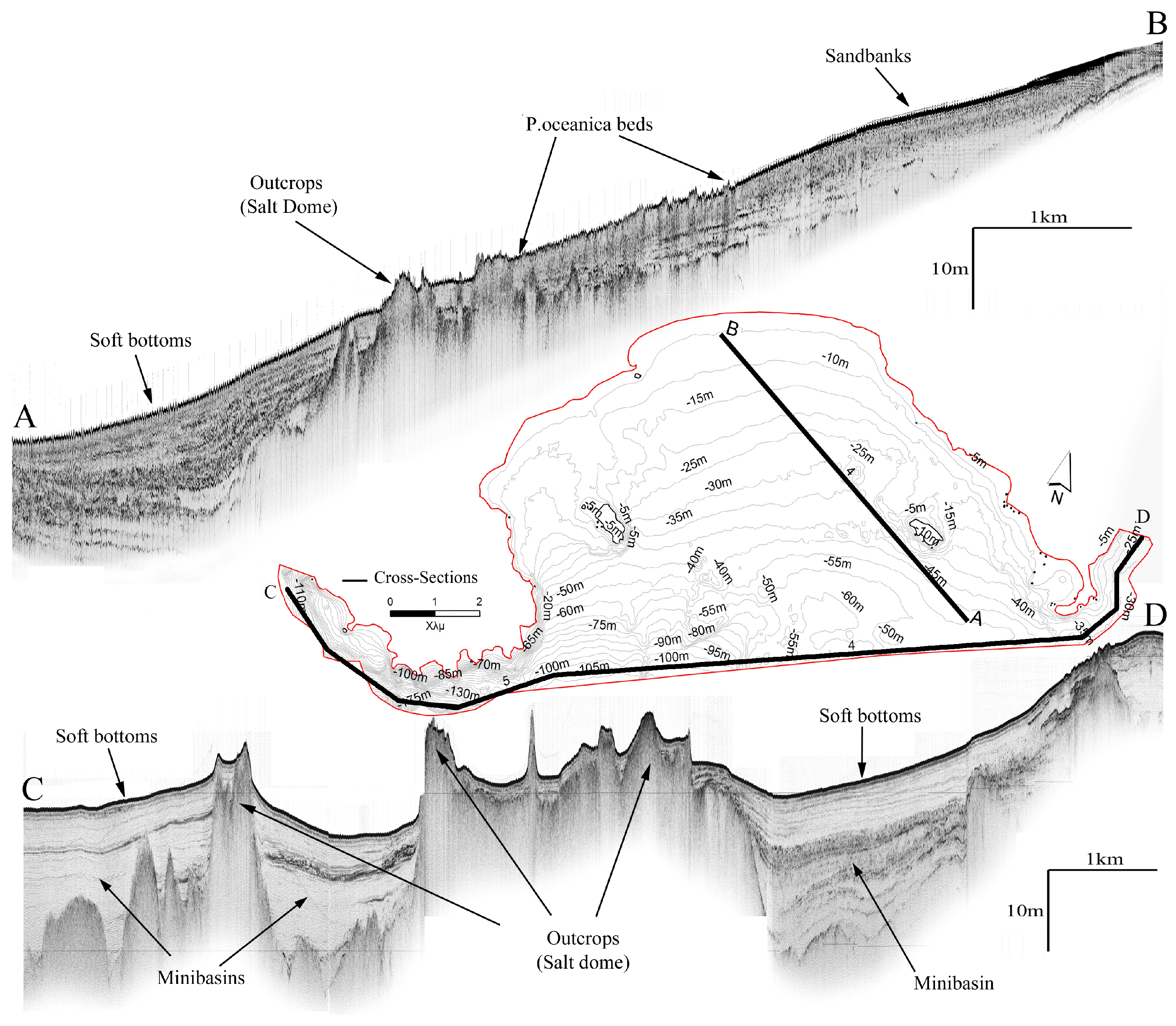
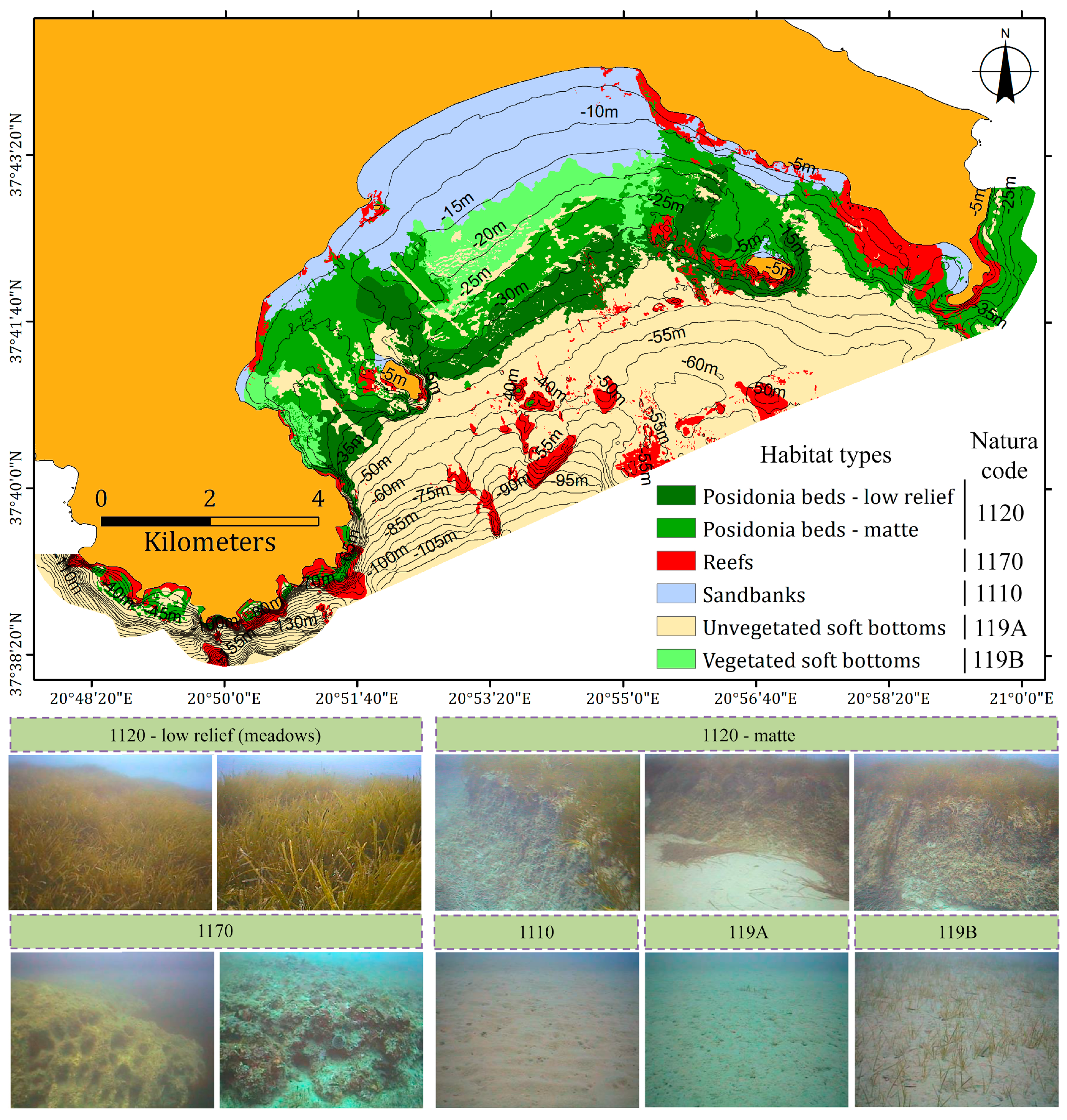
2. Study Area
3. Data Acquisition and Manual Habitat Mapping
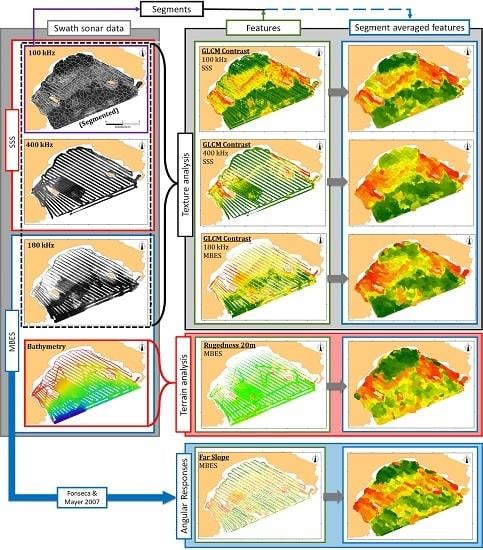
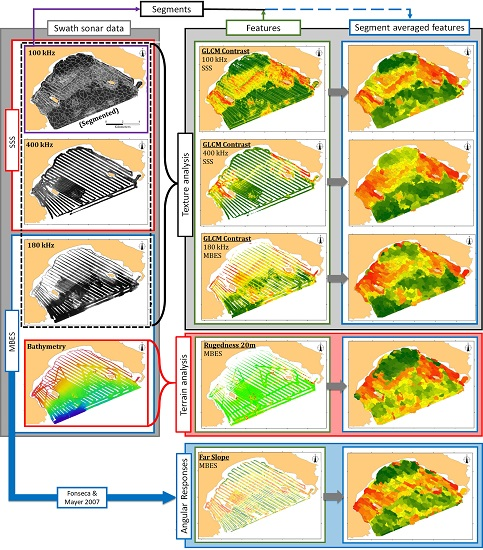
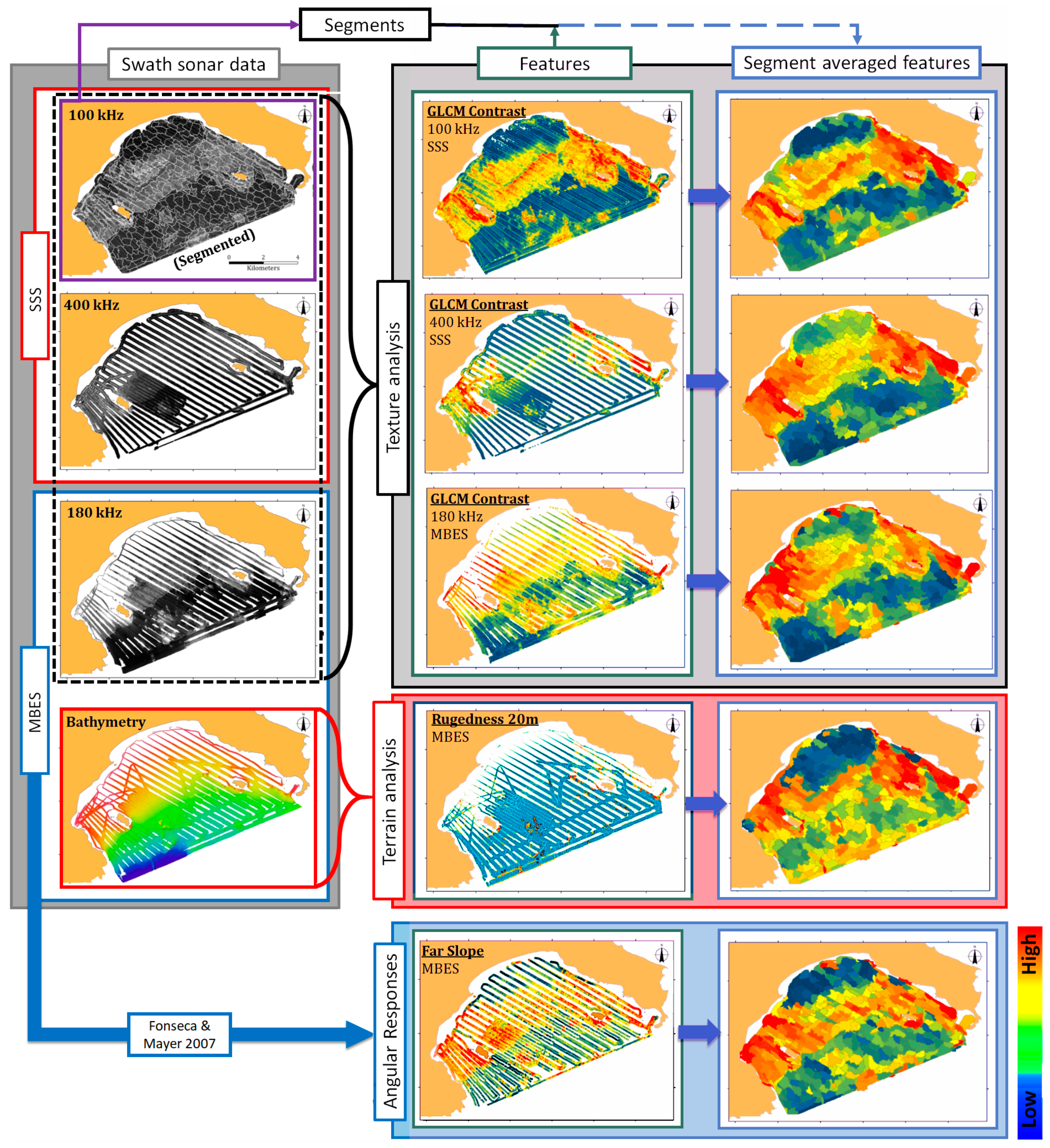
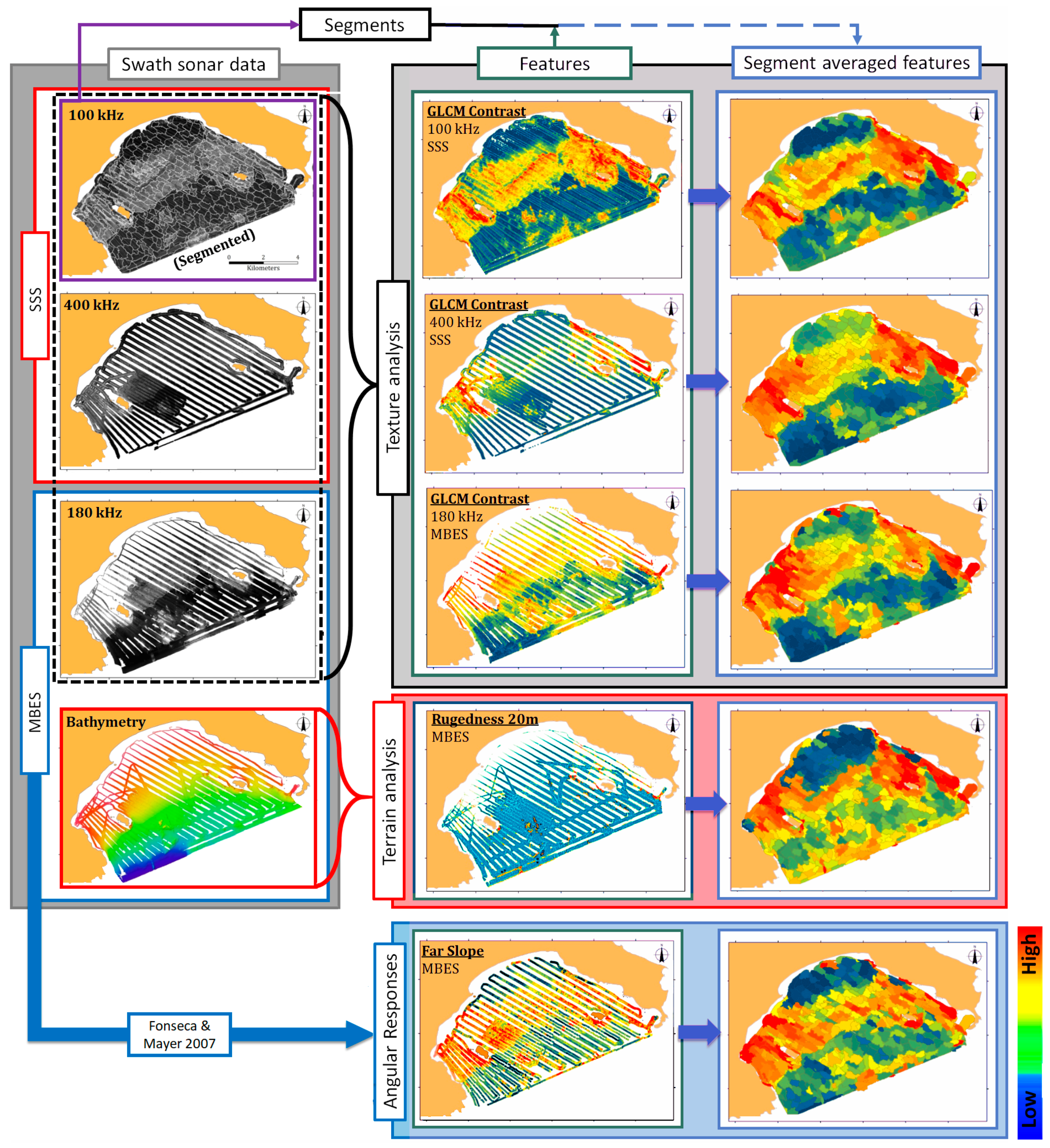
4. Multifrequency Backscatter Mosaics and Texture Analysis Features
4.1. Mosaicking MBES (180 kHz) and Dual Frequency (100 and 400 kHz) SSS Backscatter data
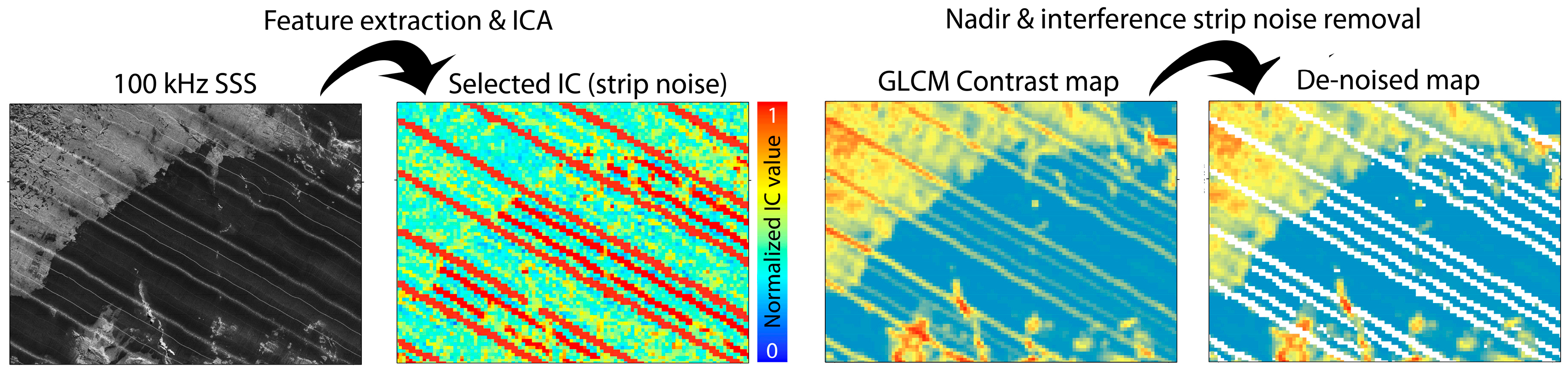
4.2. Image Texture Features
5. MBES Bathymetric Features
- Data Review: The sonar position and attitude available with the navigation survey lines were closely examined and the sonar data were compensated for heave-pitch-roll, tide-and-draft as well as for sound velocity profile information. Tidal variations were estimated using the Real Time Kinematics (RTK) GPS receiver, installed on the research vessel. True Heave, pitch and roll corrections were acquired through the MRU.
- Swath-by-swath editing: Automated geometric filters removed outliers present as spikes in the data.
- CUBE: Developed by UNH-CCOM [63], CUBE (Combined Uncertainty and Bathymetric Estimator) provides a near-automated editing of multibeam data, allowing for a rapid turn-around of data. CUBE is an error-model based, direct DTM generator, that estimates the depth plus a confidence interval directly on each node point of a bathymetric grid. The output DTM had a 2 m pixel size.
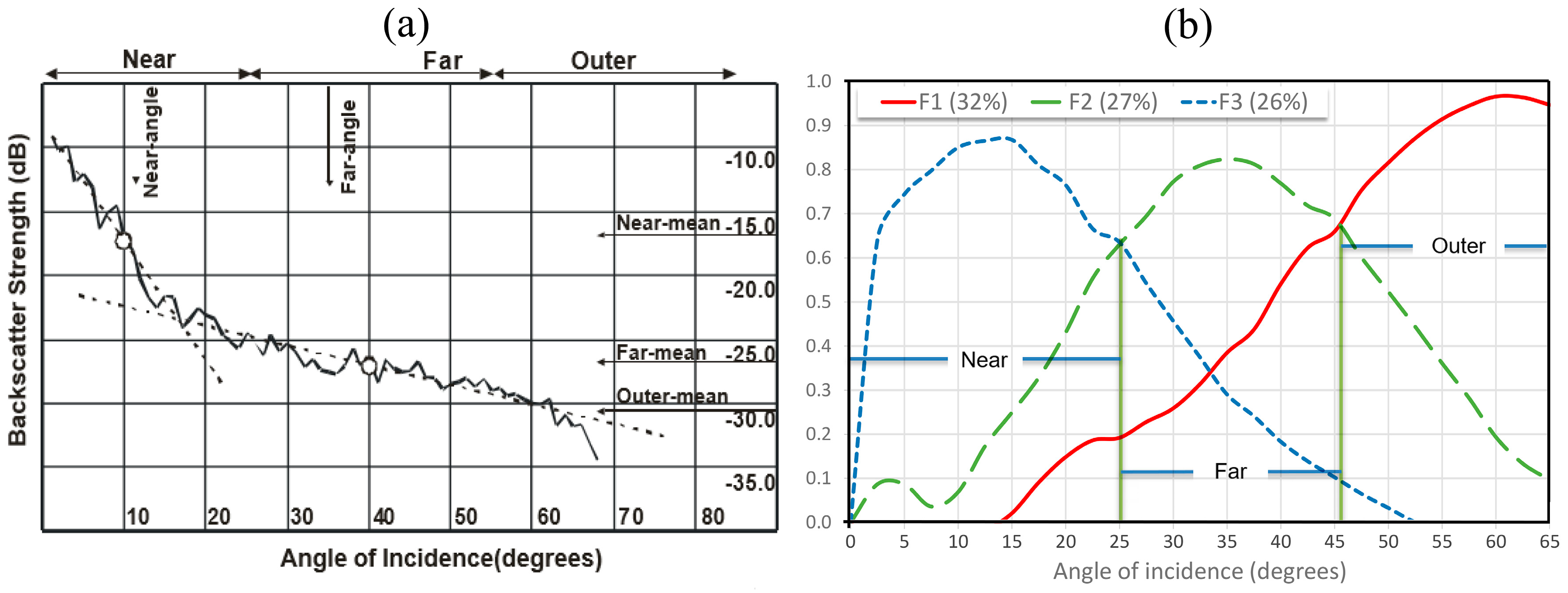
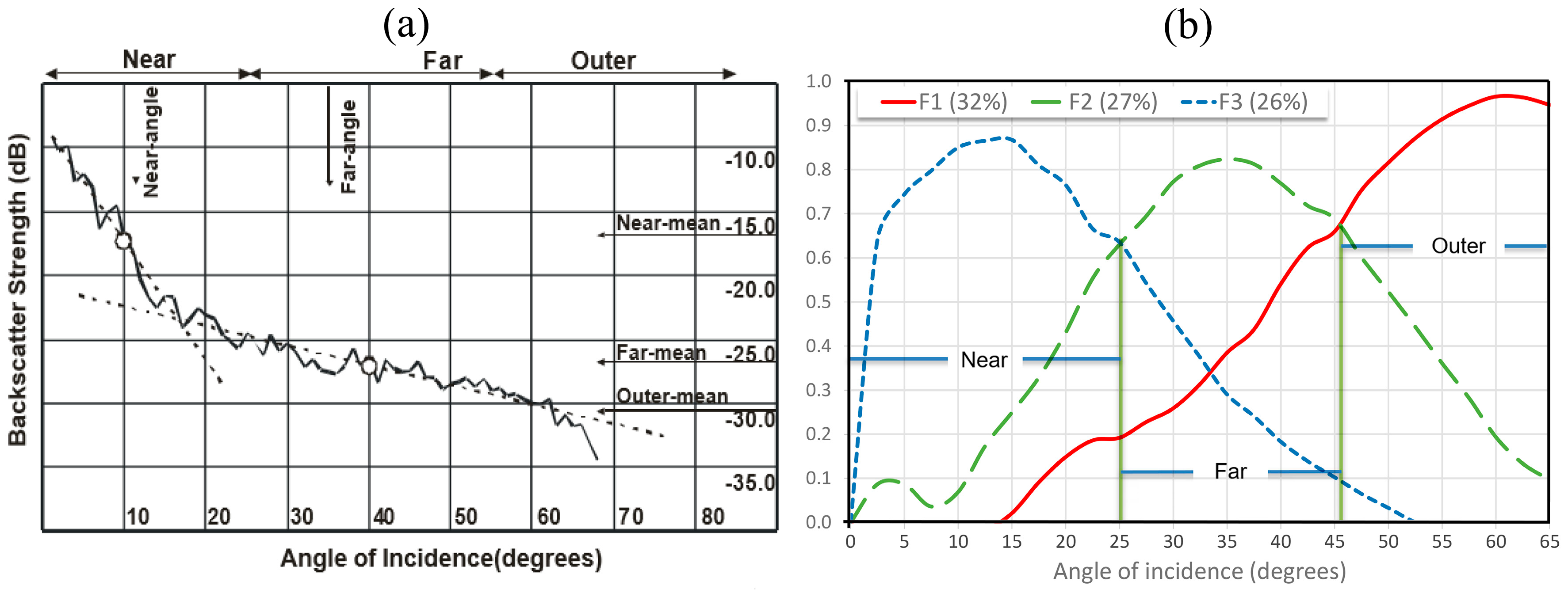
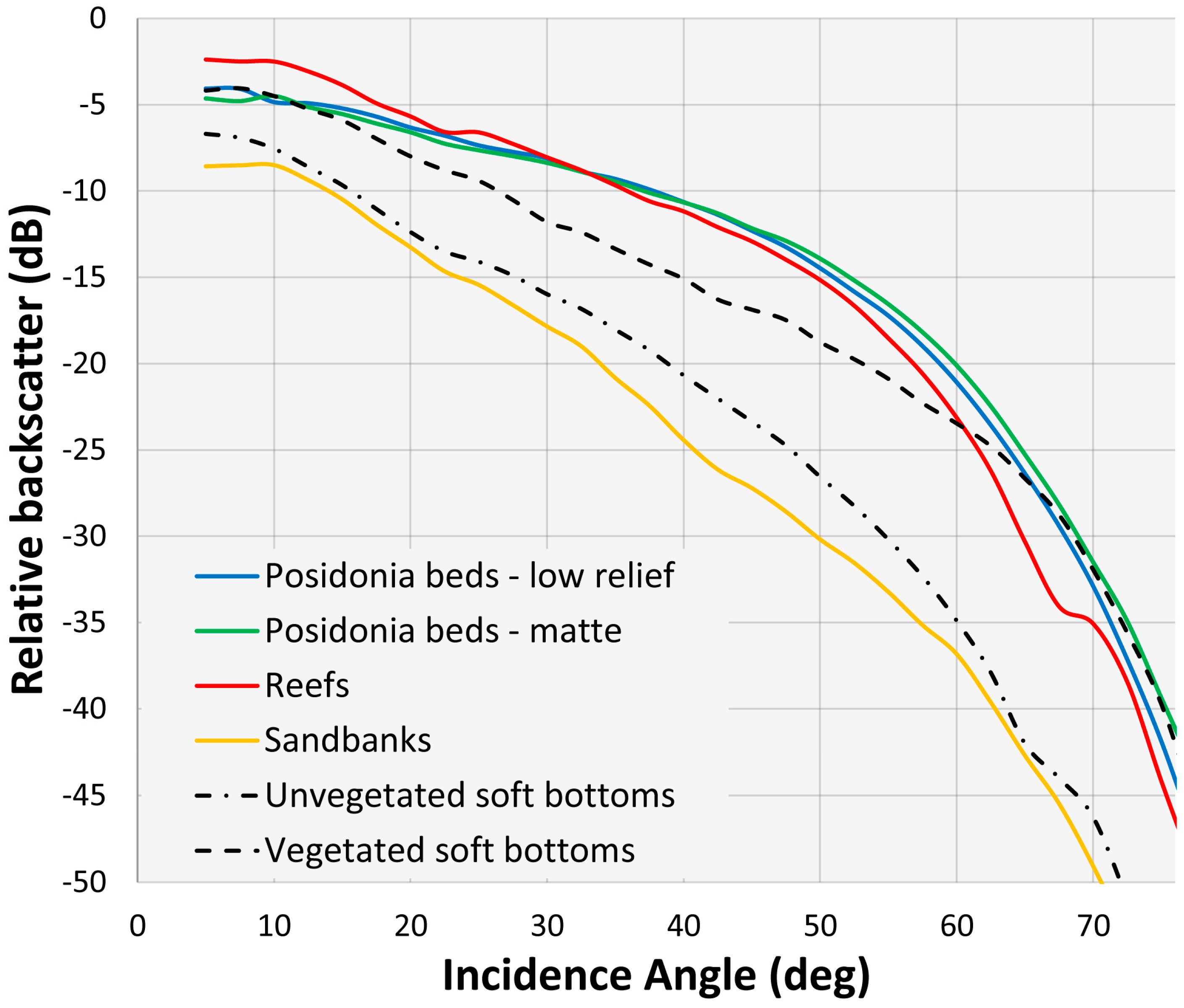
6. MBES Backscatter Angular Response Features
7. Supervised Classification
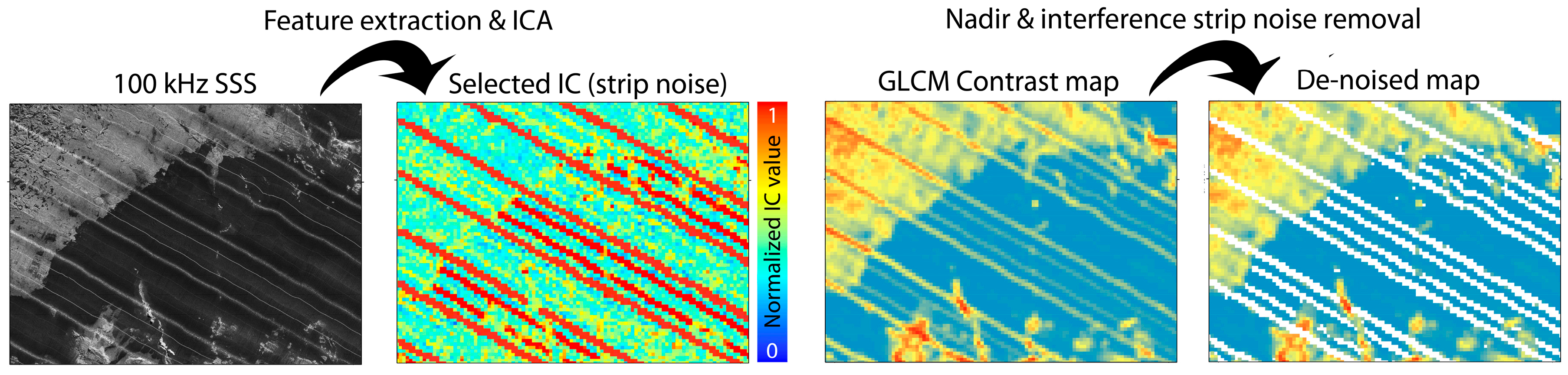
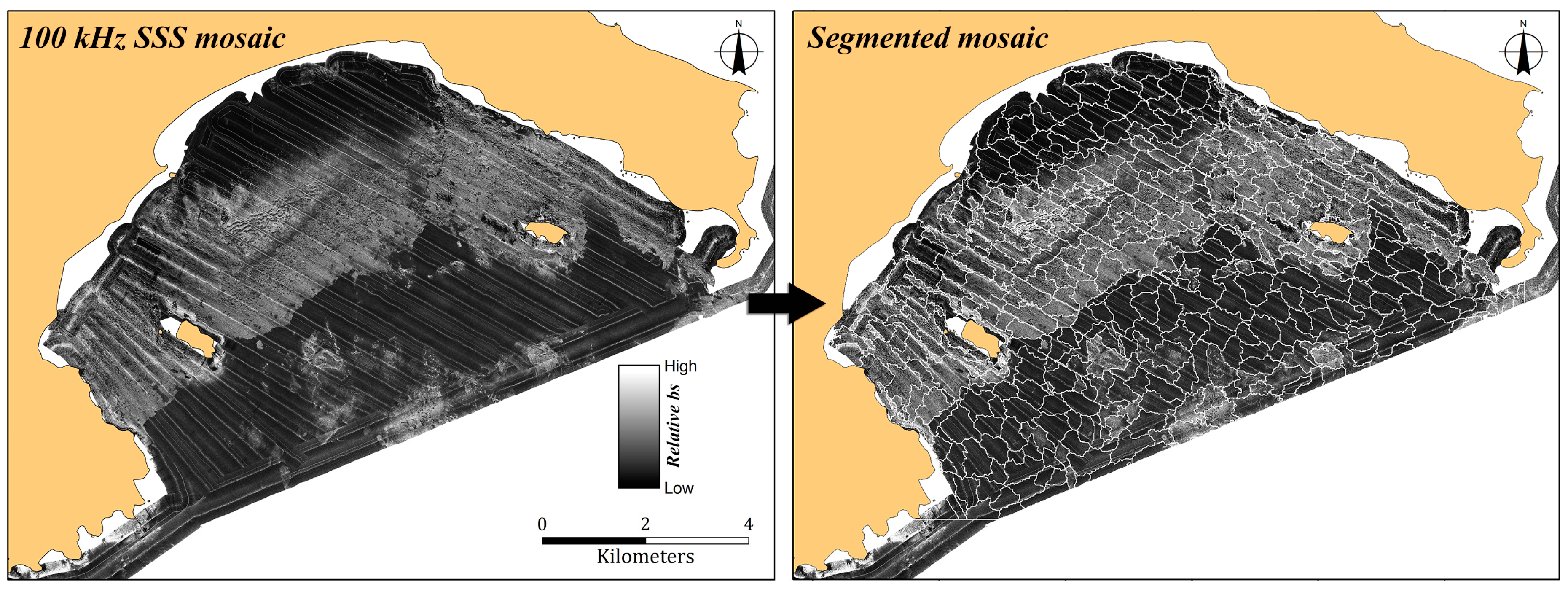
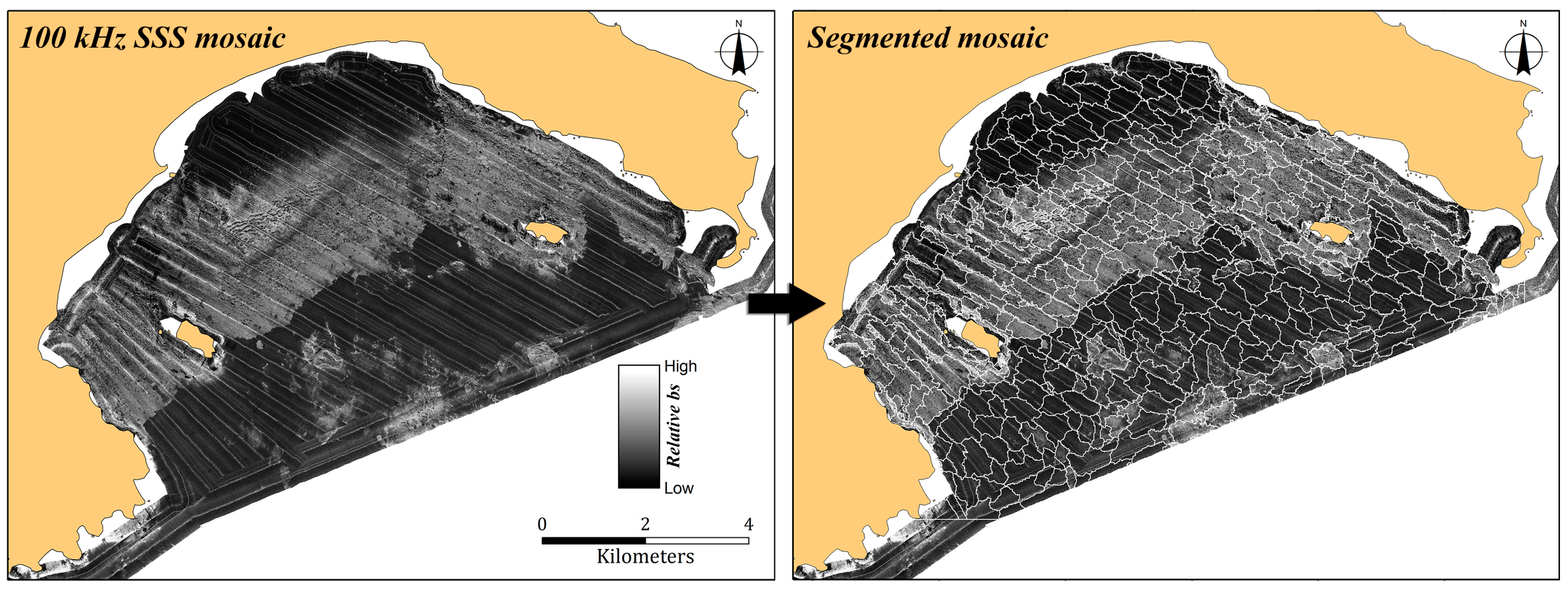
7.1. Facing Coverage and Resolution Inconsistencies: 100 kHz SSS Mosaic Segmentation for Object Based Classification
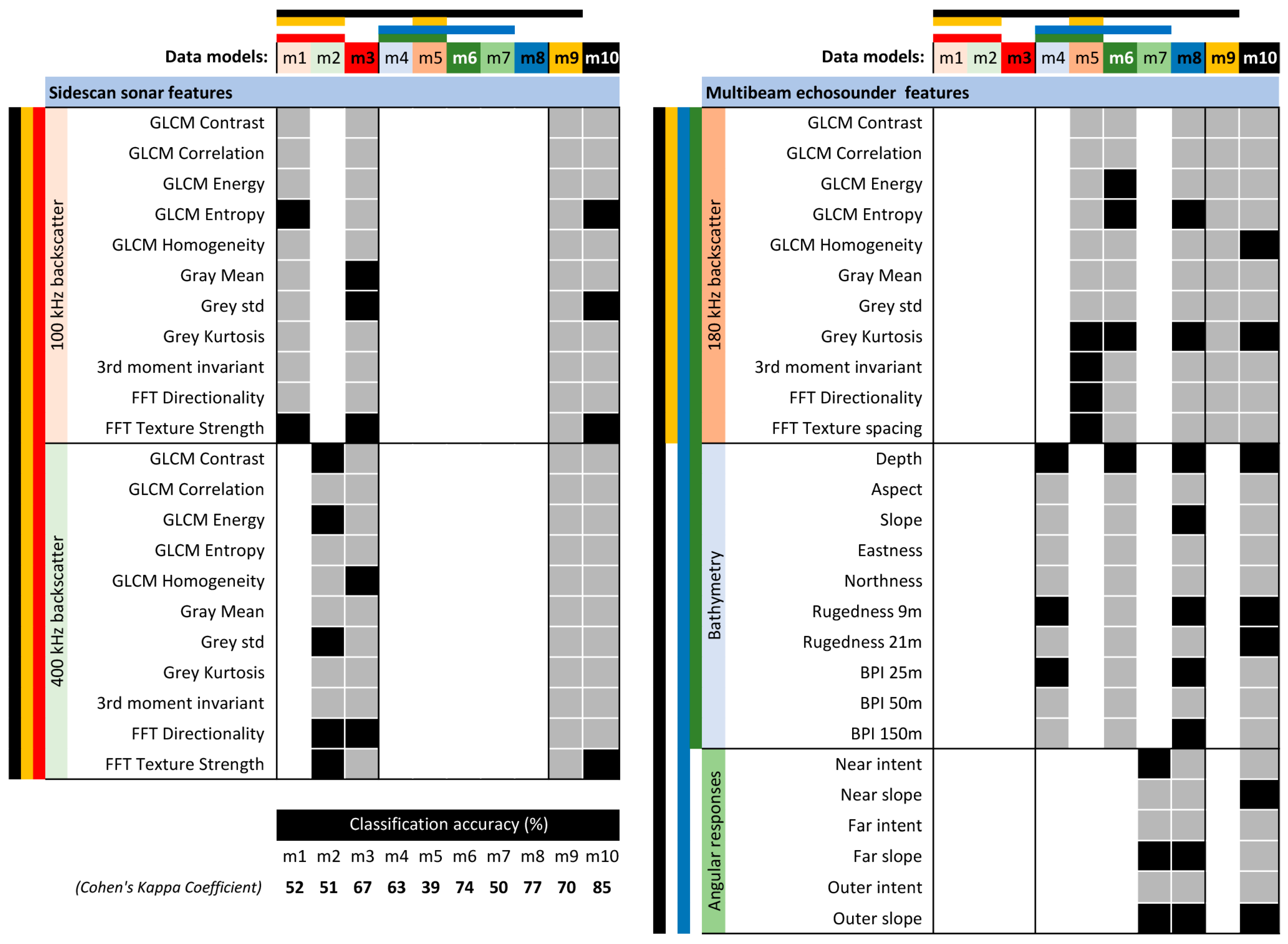
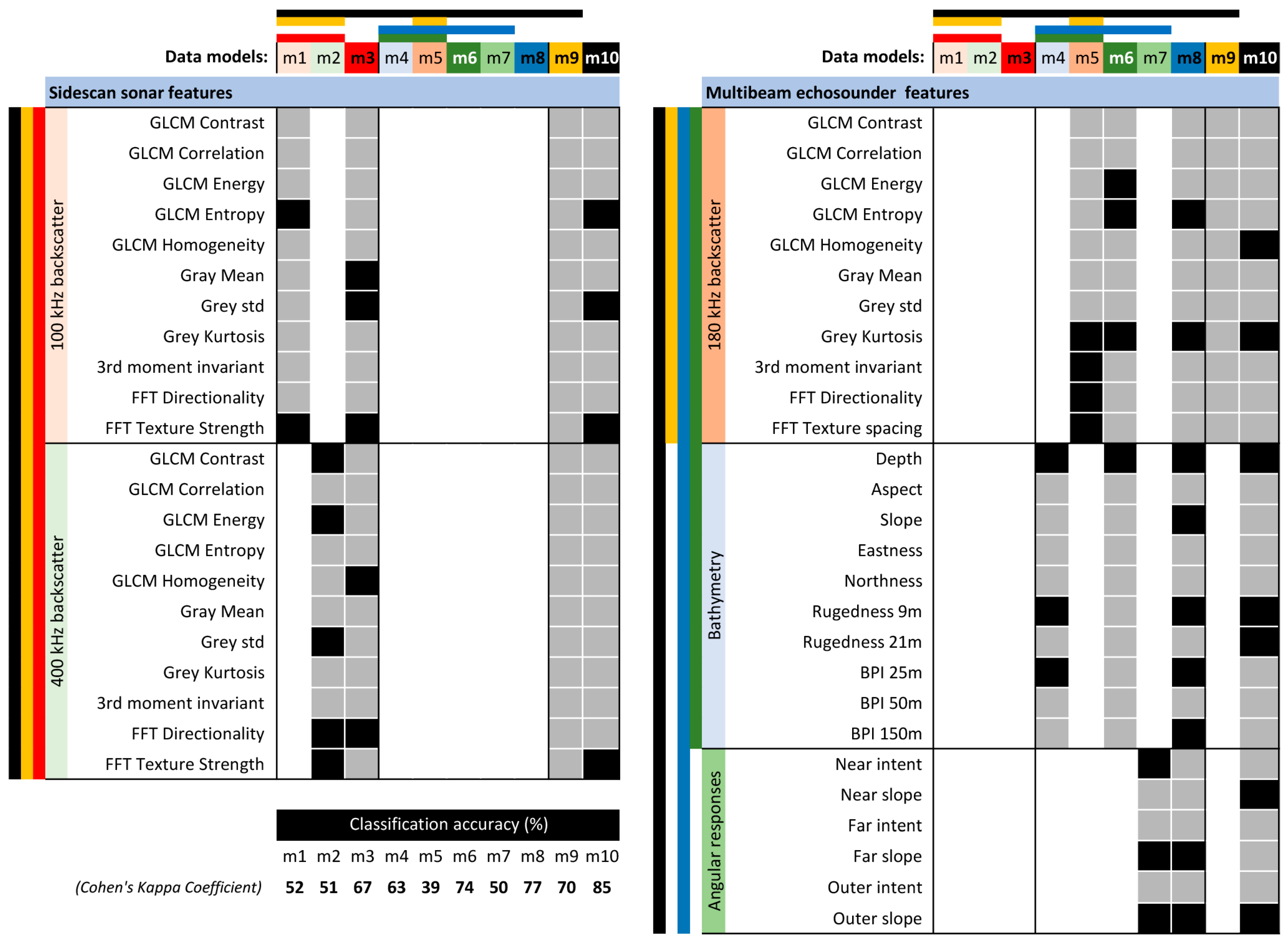
7.2. Data Models: Systems’ Features Fusion and Feature Selection
7.3. Supervised Classification: Training, Validation and Accuracies
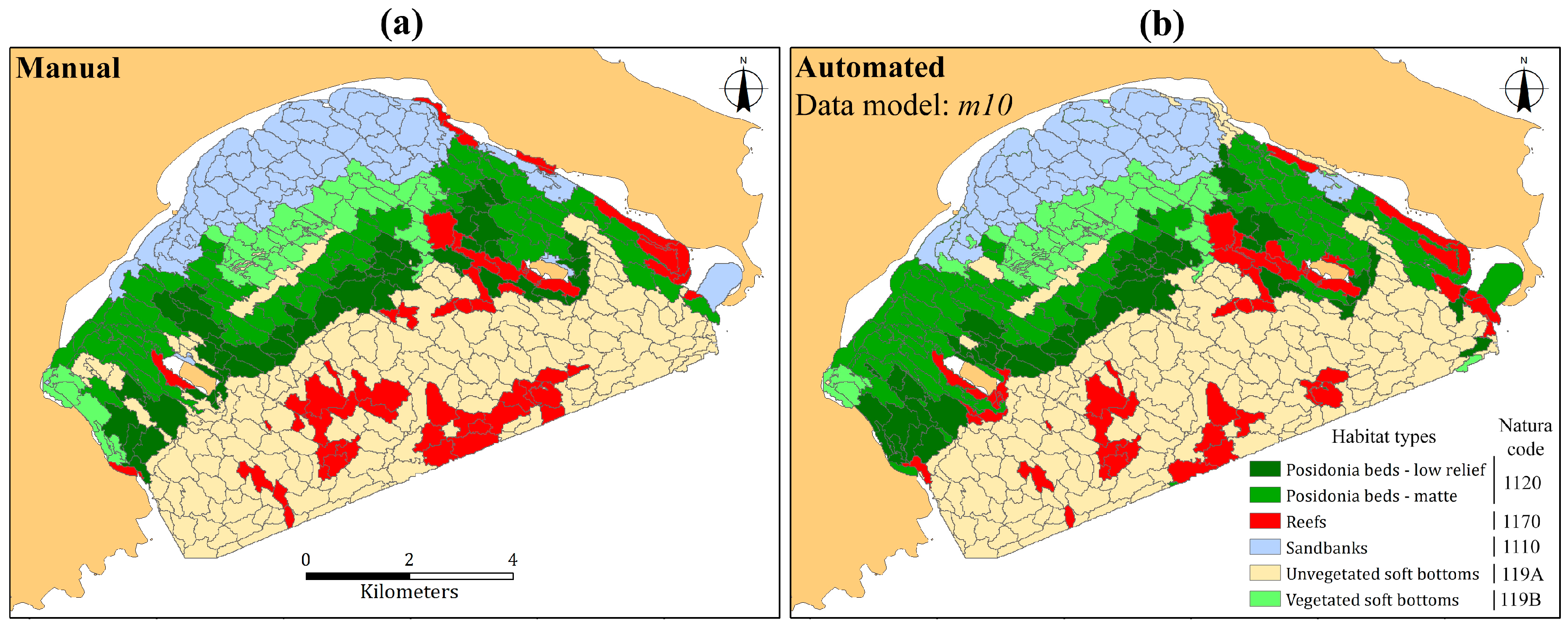
8. Results
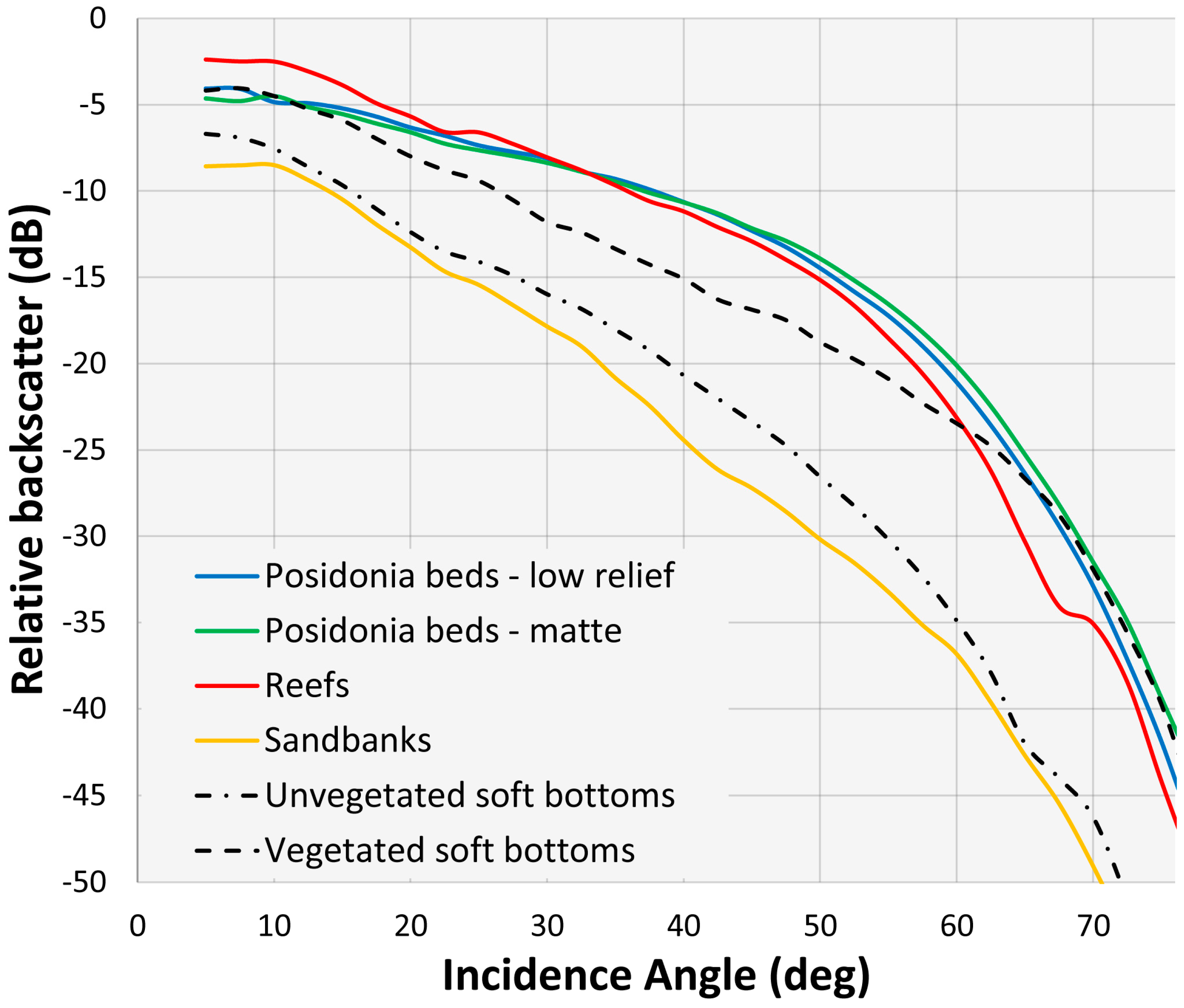
8.1. Angular Backscatter Responses
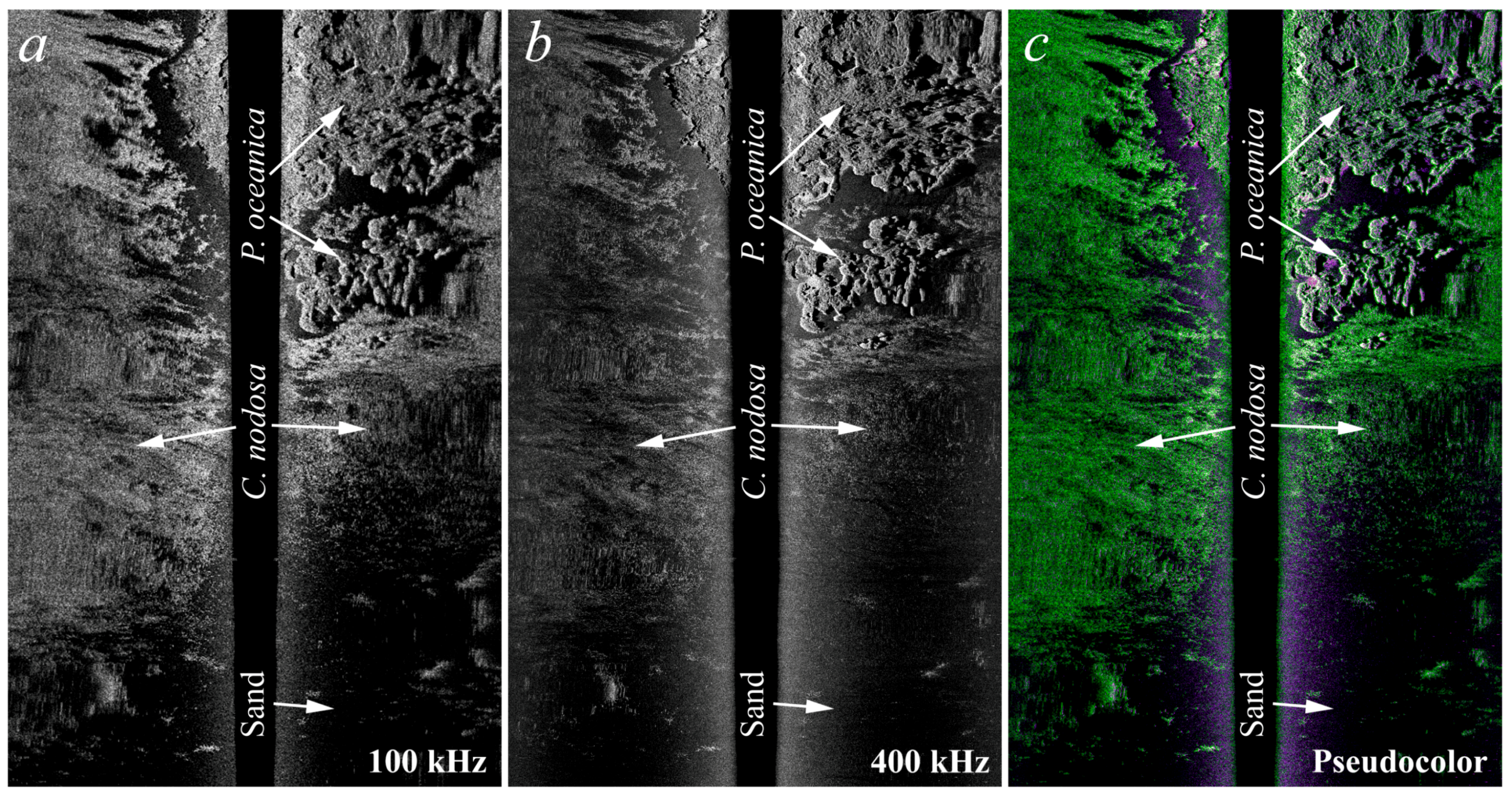
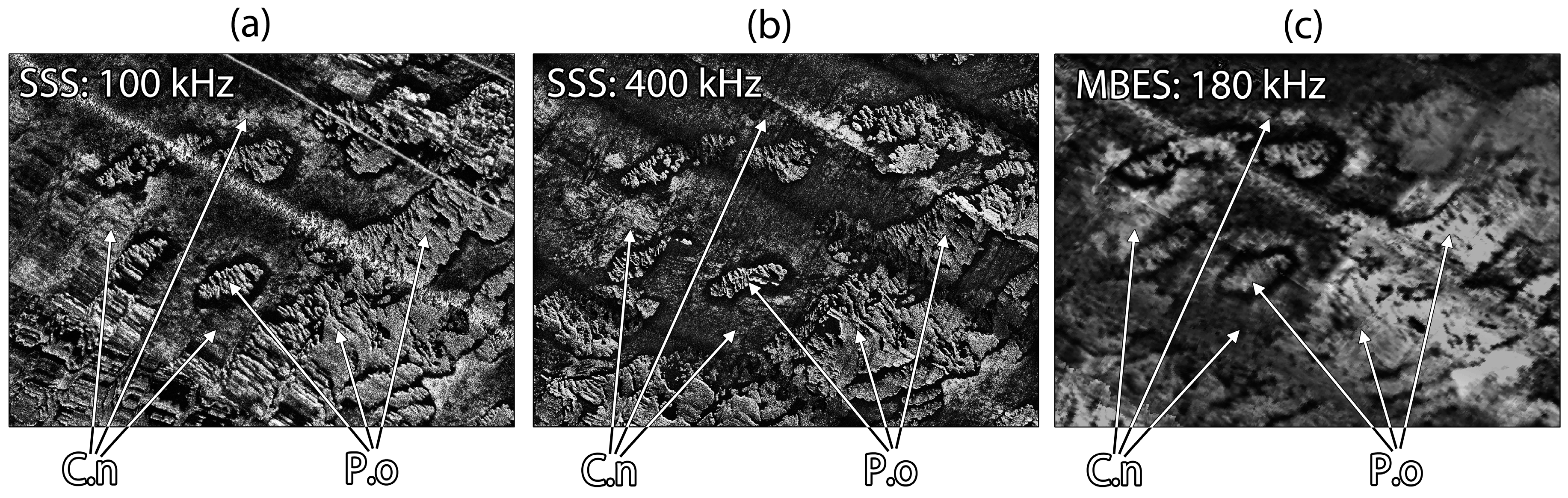
8.2. Frequency Dependent Separation of Seagrasses
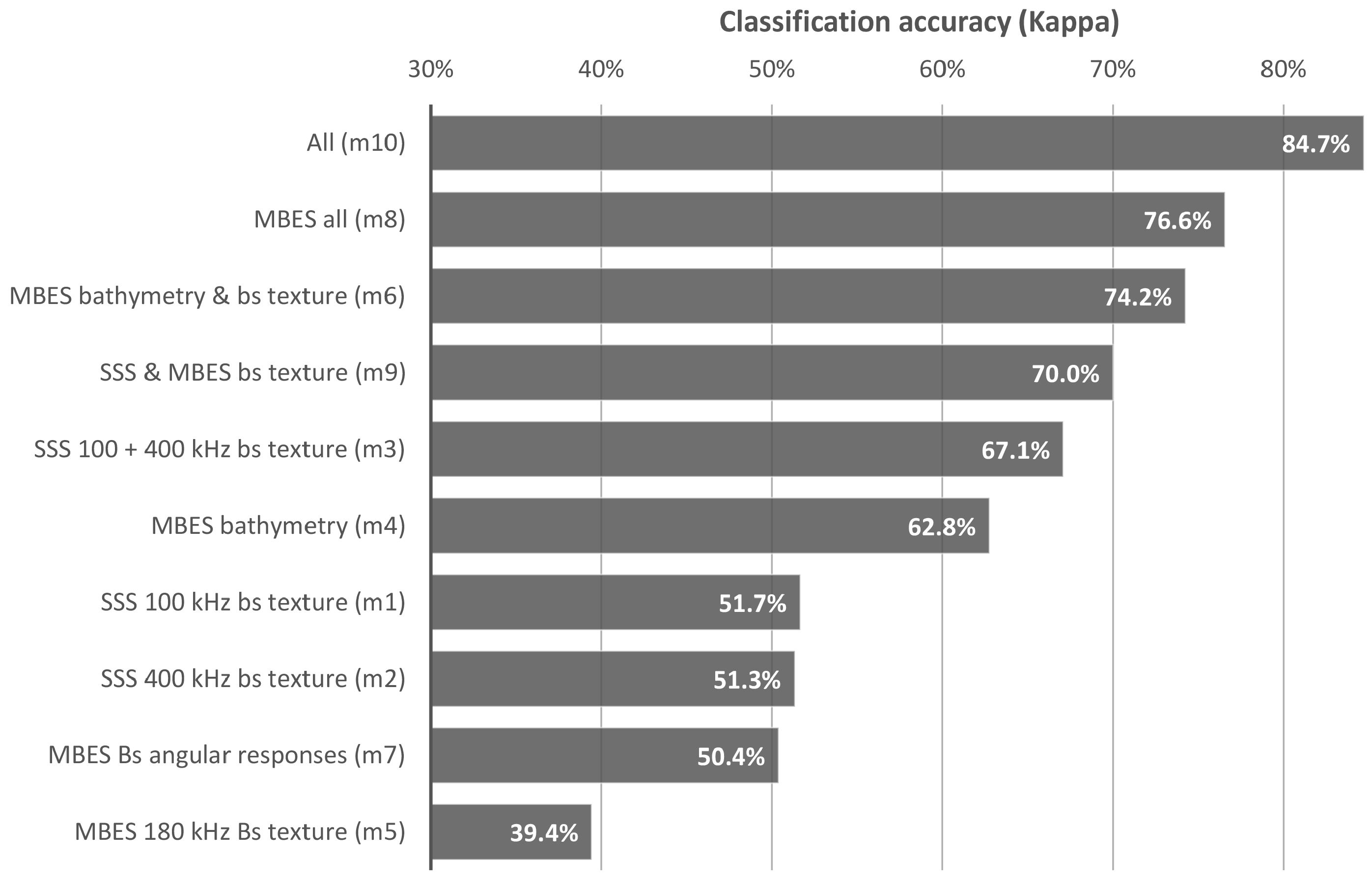
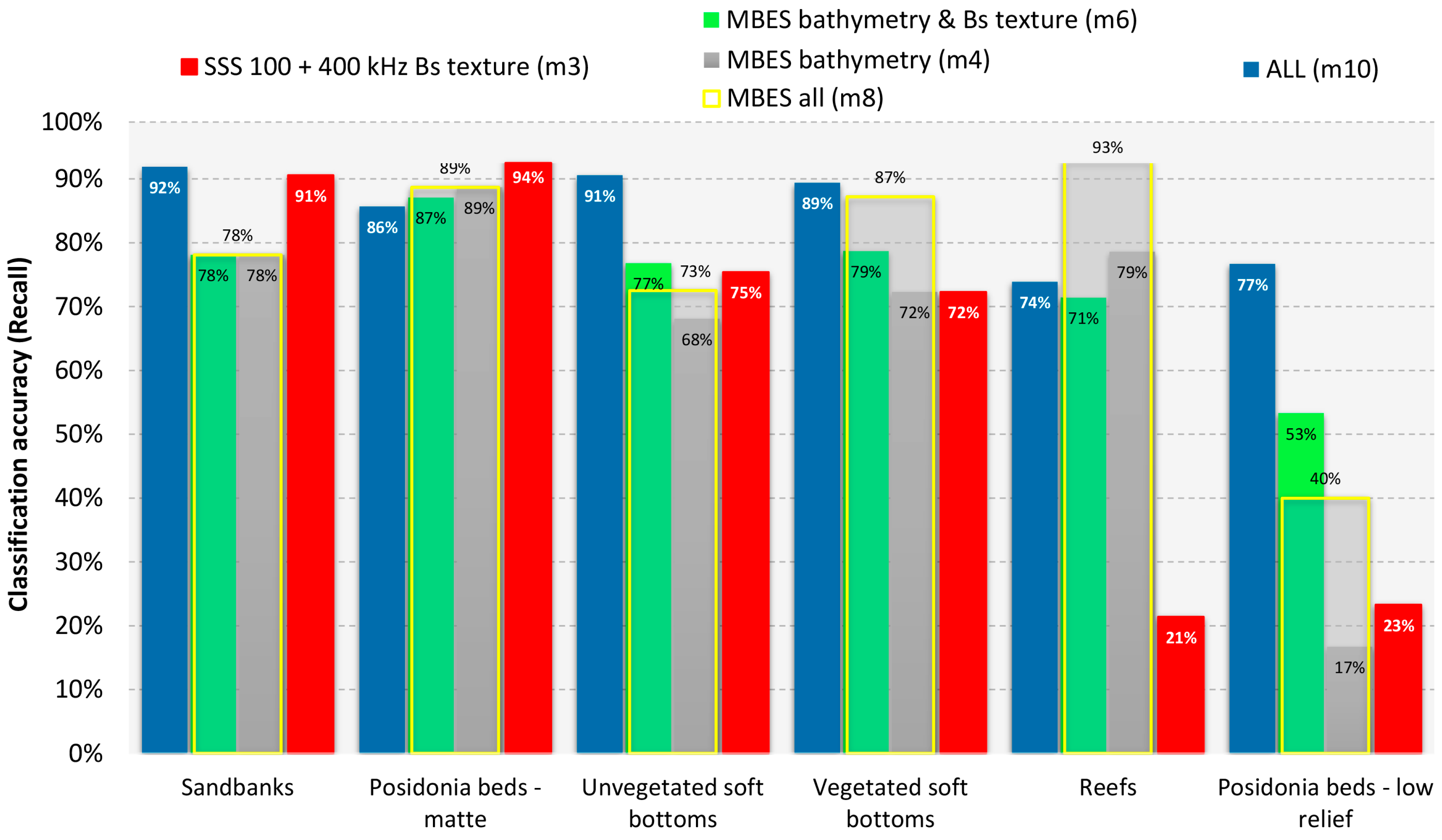
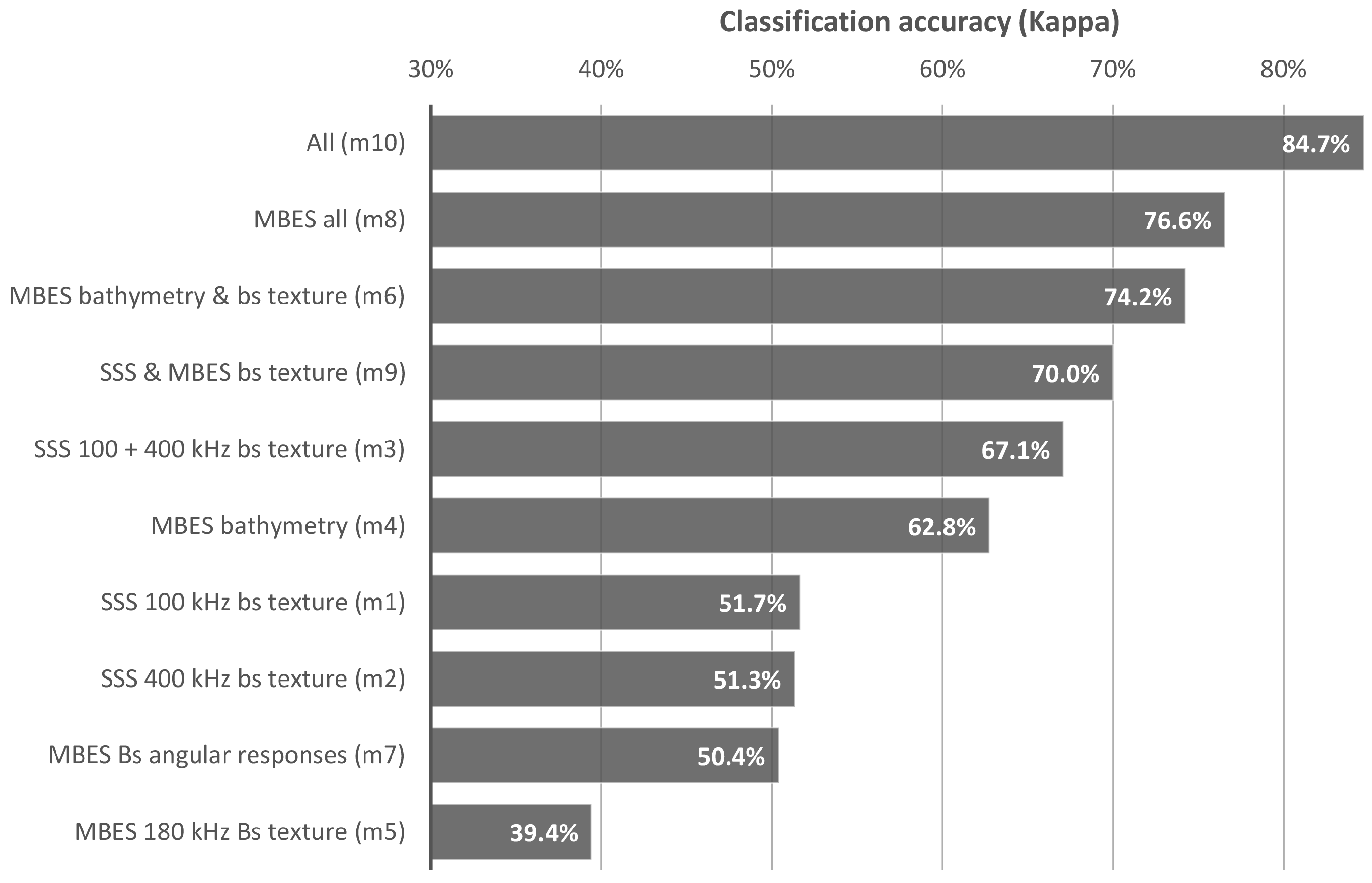
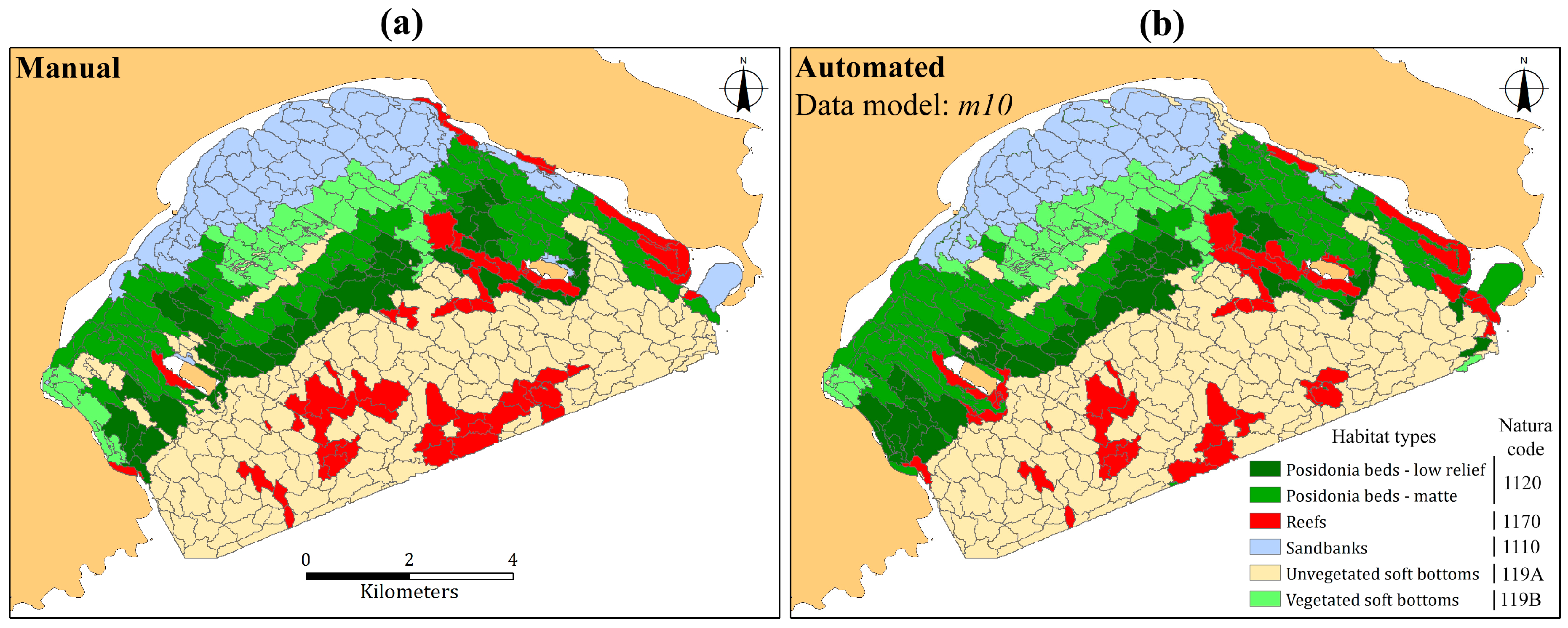
8.3. Relative Importance of MBES and SSS Data Models for Acoustic Habitat Mapping. Allies or Not?
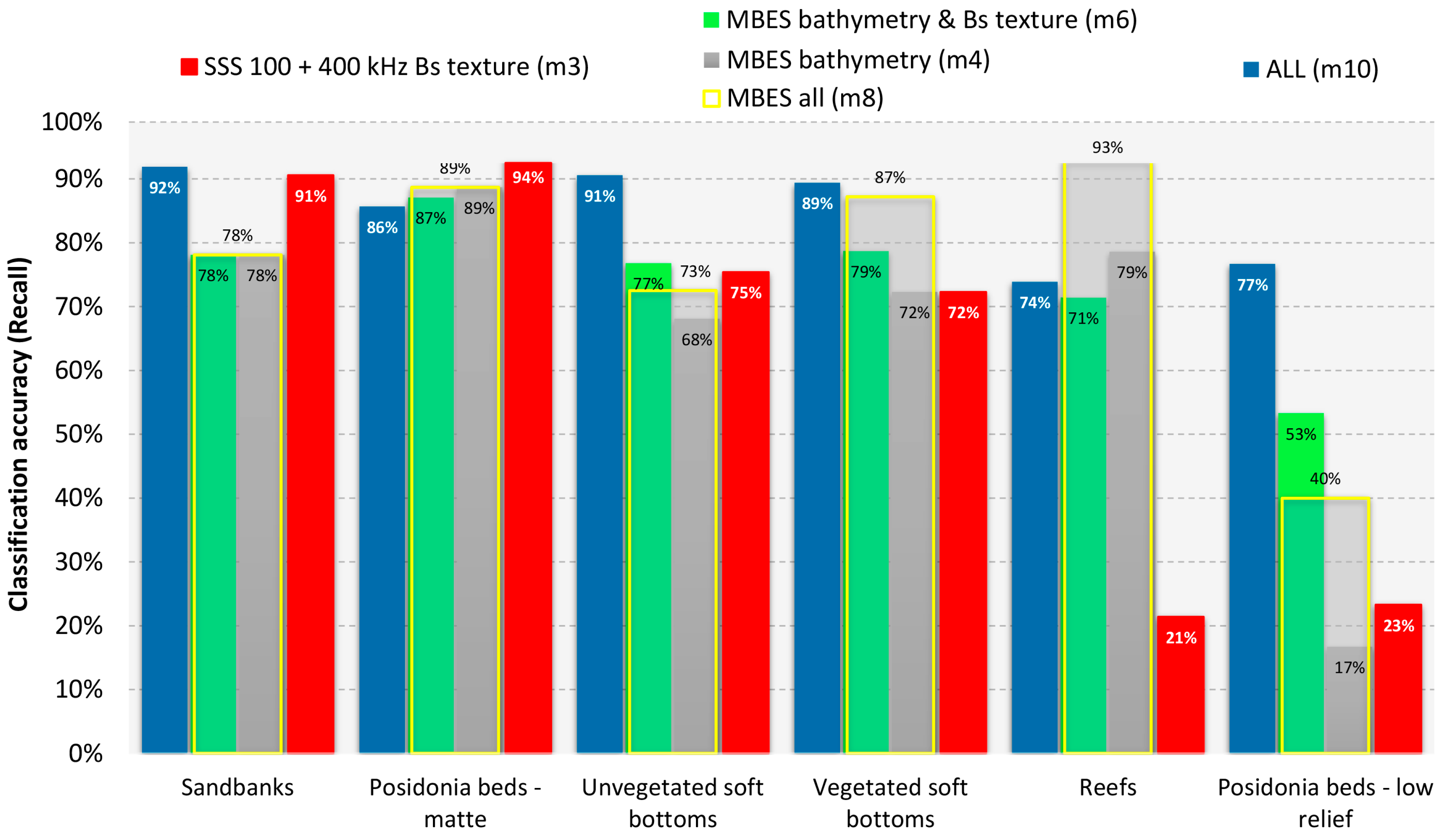
8.4. Classification Accuracy per Habitat Type. Which System is Better for Each Shallow Habitat Type?
9. Discussion
10. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Halpern, B.S.; Walbridge, S.; Selkoe, K.A.; Kappel, C.V.; Micheli, F.; D’Agrosa, C.; Bruno, J.F.; Casey, K.S.; Ebert, C.; Fox, H.E.; et al. A global map of human impact on marine ecosystems. Science 2008, 319, 948–952. [Google Scholar] [CrossRef] [PubMed]
- Coll, M.; Piroddi, C.; Steenbeek, J.; Kaschner, K.; Lasram, F.B.R.; Aguzzi, J.; Ballesteros, E.; Bianchi, C.N.; Corbera, J.; Dailianis, T.; et al. The biodiversity of the Mediterranean Sea: Estimates, patterns, and threats. PLoS ONE 2010, 5, 1–36. [Google Scholar] [CrossRef] [PubMed]
- Brown, C.J.; Beaudoin, J.; Brissette, M.; Gazzola, V. Setting the Stage for Multi-Spectral Acoustic Backscatter Research. In Proceedings of the U.S. Hydrographic Conference 2017, Galveston, TX, USA, 22 March 2017; p. 11. [Google Scholar]
- Vasquez, M.; Mata Chacón, D.; Tempera, F.; O’Keeffe, E.; Galparsoro, I.; Sanz Alonso, J.L.; Gonçalves, J.M.S.; Bentes, L.; Amorim, P.; Henriques, V.; et al. Broad-scale mapping of seafloor habitats in the north-east Atlantic using existing environmental data. J. Sea Res. 2015, 100, 120–132. [Google Scholar] [CrossRef]
- Levin, N.; Coll, M.; Fraschetti, S.; Gal, G.; Giakoumi, S.; Göke, C.; Heymans, J.J.; Katsanevakis, S.; Mazor, T.; Öztürk, B.; et al. Biodiversity data requirements for systematic conservation planning in the Mediterranean Sea. Mar. Ecol. Prog. Ser. 2014, 508, 261–281. [Google Scholar] [CrossRef]
- Blondel, P. Bathymetry and Its Applications; InTech: Rijeka, Croatia, 2012; ISBN 9789533079592. [Google Scholar]
- Blondel, P. Handbook of Sidescan Sonar; Praxis Publishing Ltd.: Chichester, UK, 2009; ISBN 978-3-540-49886-5. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Blondel, P., Ed.; Springer Science & Business Media: Berlin, Germany, 2002; ISBN 9783540784807. [Google Scholar]
- Lamarche, G.; Lurton, X. Recommendations for improved and coherent acquisition and processing of backscatter data from seafloor-mapping sonars. Mar. Geophys. Res. 2018, 39, 5–22. [Google Scholar] [CrossRef]
- Parnum, I.M.; Gavrilov, A.N. High-frequency multibeam echo-sounder measurements of seafloor backscatter in shallow water: Part 2-Mosaic production, analysis and classification. Underw. Technol. 2011, 30, 13–26. [Google Scholar] [CrossRef]
- Le Bas, T.P.; Huvenne, V.A.I. Acquisition and processing of backscatter data for habitat mapping-Comparison of multibeam and sidescan systems. Appl. Acoust. 2009, 70, 1248–1257. [Google Scholar] [CrossRef]
- Ierodiaconou, D.; Schimel, A.C.G.; Kennedy, D.; Monk, J.; Gaylard, G.; Young, M.; Diesing, M.; Rattray, A. Combining pixel and object based image analysis of ultra-high resolution multibeam bathymetry and backscatter for habitat mapping in shallow marine waters. Mar. Geophys. Res. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Tamsett, D. Sea-bed characterisation and classification from the power spectra of side-scan sonar data. Mar. Geophys. Res. 1993, 15, 43–64. [Google Scholar] [CrossRef]
- Blondel, P. Textural analysis of sidescan sonar imagery and generic seafloor characterization. J. Acoust. Soc. Am. 1998, 105, 1206. [Google Scholar] [CrossRef]
- Che Hasan, R.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating multibeam backscatter angular response, mosaic and bathymetry data for benthic habitat mapping. PLoS ONE 2014, 9, e97339. [Google Scholar] [CrossRef] [PubMed]
- Che Hasan, R.; Ierodiaconou, D.; Laurenson, L. Combining angular response classification and backscatter imagery segmentation for benthic biological habitat mapping. Estuar. Coast. Shelf Sci. 2012, 97, 1–9. [Google Scholar] [CrossRef]
- Fonseca, L.; Brown, C.; Calder, B.; Mayer, L.; Rzhanov, Y. Angular range analysis of acoustic themes from Stanton Banks Ireland: A link between visual interpretation and multibeam echosounder angular signatures. Appl. Acoust. 2009, 70, 1298–1304. [Google Scholar] [CrossRef]
- Rzhanov, Y.; Fonseca, L.; Mayer, L. Construction of seafloor thematic maps from multibeam acoustic backscatter angular response data. Comput. Geosci. 2012, 41, 181–187. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E.; Gardner, J.; Torresan, M.; Mayer, L. The limits of spatial resolution achievable using a 30 kHz multibeam sonar: Model predictions and field results. In Proceedings of the IEEE Oceans (OCEANS’98 IEEE/OES), Nice, France, 28 September–1 October 1998; Volume 3, pp. 1823–1827. [Google Scholar]
- Hughes Clarke, J.E. Multispectral Acoustic Backscatter from Multibeam, Improved Classification Potential. In Proceedings of the U.S. Hydro 2015 Conference, National Harbor, MD, USA, 16–19 March 2015; Volume 1, p. 19. [Google Scholar]
- Duffy, G.P.; Toal, D.; Stapleton, F. Application of multi-frequency backscatter to seabed determination. In Proceedings of the GEOSCIENCE, Dublin Castle, Ireland, 3–4 November 2010. [Google Scholar]
- Blondel, P.; Gómez Sichi, O. Textural analyses of multibeam sonar imagery from Stanton Banks, Northern Ireland continental shelf. Appl. Acoust. 2009, 70, 1288–1297. [Google Scholar] [CrossRef]
- Pasqualini, V.; Pergent-martini, C.; Clabaut, P.; Pergent, G. Mapping of Posidonia oceanica using Aerial Photographs and Side Scan Sonar: Application off the Island of Corsica (France). Estuar. Coast. Shelf Sci. 1998, 47, 359–367. [Google Scholar] [CrossRef]
- Hermand, J.-P. The effect of photosynthetic bubbles on underwater sound propagation. In Proceedings of the 18th ICA, Kyoto, Japan, 4–9 April 2004; pp. 2515–2518. [Google Scholar]
- Kiparissis, S.; Fakiris, E.; Papatheodorou, G.; Geraga, M.; Kornaros, M.; Kapareliotis, A.; Ferentinos, G. Illegal trawling and induced invasive algal spread as collaborative factors in a Posidonia oceanica meadow degradation. Biol. Invasions 2011, 13, 669–678. [Google Scholar] [CrossRef]
- Wilson, P.S.; Dunton, K.H. Laboratory investigation of the acoustic response of seagrass tissue in the frequency band 0.5–2.5 kHz. J. Acoust. Soc. Am. 2009, 125, 1951–1959. [Google Scholar] [CrossRef] [PubMed]
- Blondel, P.; Pouliquen, E. Acoustic Textures and Detection of Shipwreck Cargo–Example of a Roman Ship near Elba, Italy. In Proceedings of the First Internal Congress on the Application of Recent Advances in Underwater Detection and Survey Techniques to Underwater Archaeology, Bodrum, Turkey, 3–7 May 2004; pp. 135–142. [Google Scholar]
- Kruss, A.; Blondel, P.; Tegowski, J. Acoustic properties of macrophytes: Comparison of single-beam and multibeam imaging with modeling results. In Proceedings of the 11th European Conference on Underwater Acoustics 2012 (ECUA 2012), Edinburgh, UK, 1–6 July 2012; pp. 168–175. [Google Scholar]
- Chakraborty, B.; Fernandes, W. Bathymetric Techniques and Indian Ocean Applications. In Bathymetry and Its Applications; Blondel, P., Ed.; InTech: Rijeka, Croatia, 2012; pp. 3–30. ISBN 9789533079592. [Google Scholar]
- Gaida, T.C.; Afrizal, T.; Ali, T.; Snellen, M.; Amiri-simkooei, A. A Multispectral Bayesian Classification Method for Increased Acoustic Discrimination of Seabed Sediments Using Multi-Frequency Multibeam Backscatter Data. Geosciences 2018, 8, 455. [Google Scholar] [CrossRef]
- Feldens, P.; Schulze, I.; Papenmeier, S.; Schönke, M.; Schneider von Deimling, J. Improved Interpretation of Marine Sedimentary Environments Using Multi-Frequency Multibeam Backscatter Data. Geosciences 2018, 8, 214. [Google Scholar] [CrossRef]
- Buscombe, D. Probabilistic Substrate Classification with Multispectral Acoustic Backscatter: A Comparison of Discriminative and Generative Models. Geosciences 2018, 11, 395. [Google Scholar] [CrossRef]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore Benthic Habitat Mapping Based on Multi-Frequency, Multibeam Echosounder Data Using a Combined Object-Based Approach: A Case Study from the Rowy Site in the Southern Baltic Sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef]
- Collier, J.S.; Brown, C.J. Correlation of sidescan backscatter with grain size distribution of surficial seabed sediments. Mar. Geol. 2005, 214, 431–449. [Google Scholar] [CrossRef]
- Ryan, W.B.F.; Flood, R.D. Side-looking sonar backscatter response at dual frequencies. Mar. Geophys. Res. 1996, 18, 689–705. [Google Scholar] [CrossRef]
- Tamsett, D.; McIlvenny, J.; Watts, A. Colour Sonar: Multi-Frequency Sidescan Sonar Images of the Seabed in the Inner Sound of the Pentland Firth, Scotland. J. Mar. Sci. Eng. 2016, 4, 26. [Google Scholar] [CrossRef]
- Papatheodorou, G.; Avramidis, P.; Fakiris, E.; Christodoulou, D.; Kontopoulos, N. Bed diversity in the shallow water environment of Pappas lagoon in Greece. Int. J. Sediment Res. 2012, 27, 1–17. [Google Scholar] [CrossRef]
- Lucieer, V.L. Object-oriented classification of sidescan sonar data for mapping benthic marine habitats. Int. J. Remote Sens. 2008, 29, 905–921. [Google Scholar] [CrossRef]
- Huvenne, V.A.I.; Blondel, P.; Henriet, J.P. Textural analyses of sidescan sonar imagery from two mound provinces in the Porcupine Seabight. Mar. Geol. 2002, 189, 323–341. [Google Scholar] [CrossRef]
- Fakiris, E.; Zoura, D.; Yuri, R. On Importance of Acoustic Backscatter Corrections for Texture-Based Seafloor Characterization. In Proceedings of the 11th European Conference on Underwater Acoustics, Edinburgh, UK, 2–6 July 2012; pp. 1362–1369. [Google Scholar]
- Margaritoulis, D. Nesting Activity and Reproductive Output of Loggerhead Sea Turtles, Caretta caretta, Over 19 Seasons (1984–2002) at Laganas Bay, Zakynthos, Greece: The Largest Rookery in the Mediterranean. Chelonian Conserv. Biol. 2005, 4, 916–929. [Google Scholar]
- Dimitriadis, C.; Sini, M.; Trygonis, V.; Gerovasileiou, V.; Sourbès, L.; Koutsoubas, D. Assessment of fish communities in a Mediterranean MPA: Can a seasonal no-take zone provide effective protection? Estuar. Coast. Shelf Sci. 2018, 207, 223–231. [Google Scholar] [CrossRef]
- Velegrakis, A.; Hasiotis, T.; Monioudi, I.; Manoutsoglou, E.; Psarros, F.; Andreadis, O.; Tziourrou, P. Evaluation of Climate Change Impacts on the Sea-Turtle Nesting Beaches of the National Marine Park of Zakynthos Protected Area. In Proceedings of the 3rd International Symposium Effects of Climate Change on the World’s Oceans, Santos, Brazi, 23–27 Marvh 2015. [Google Scholar]
- Pasqualini, V.; Pergent-Martini, C.; Pergent, G.; Agreil, M.; Skoufas, G.; Sourbes, L.; Tsirika, A. Use of SPOT 5 for mapping seagrasses: An application to Posidonia oceanica. Remote Sens. Environ. 2005, 94, 39–45. [Google Scholar] [CrossRef]
- Fakiris, E.; Papatheodorou, G.; Geraga, M.; Patsourakis, M.; Ferentinos, G.; Kiparissis, S.; Kapareliotis, A.; Ramfos, A.; Trifonopoulos, G.; Kornaros, M.; et al. Mapping of P.Oceanica meadows using Side-scan and seafloor classification system (Texturean): Case studies of Laganas and Alikes Bays (Zakinthos Island, Greece). In Proceedings of the 9th Symposium on Oceanography & Fisheries, Patras, Greece, 13–16 May 2009; pp. 128–133. [Google Scholar]
- Zelilidis, A.; Papatheodorou, G.; Maravelis, A.G.; Christodoulou, D.; Tserolas, P.; Fakiris, E.; Dimas, X.; Georgiou, N.; Ferentinos, G. Interplay of thrust, back-thrust, strike-slip and salt tectonics in a fold and thrust belt system: An example from Zakynthos Island, Greece. Int. J. Earth Sci. 2016, 105, 2111–2132. [Google Scholar] [CrossRef]
- Fakiris, E.; Zoura, D.; Ramfos, A.; Spinos, E.; Georgiou, N.; Ferentinos, G.; Papatheodorou, G. Object-based classification of sub-bottom profiling data for benthic habitat mapping. Comparison with sidescan and RoxAnn in a Greek shallow-water habitat. Estuar. Coast. Shelf Sci. 2018, 208, 219–234. [Google Scholar] [CrossRef]
- Fonseca, L.E.; Calder, B.R. Geocoder: An Efficient Backscatter Map Constructor. In Proceedings of the U.S. Hydrographic 2005, San Diego, CA, USA, 29–31 March 2005; Volume 3. [Google Scholar]
- Micallef, A.; Le Bas, T.P.; Huvenne, V.A.I.; Blondel, P.; Hühnerbach, V.; Deidun, A. A multi-method approach for benthic habitat mapping of shallow coastal areas with high-resolution multibeam data. Cont. Shelf Res. 2012, 39–40, 14–26. [Google Scholar] [CrossRef]
- Blondel, P. Segmentation of the Mid-Atlantic Ridge south of the Azores, based on acoustic classification of TOBI data. Geol. Soc. Lond. Spec. Publ. 1996, 118, 17–28. [Google Scholar] [CrossRef]
- Blondel, P.; Parson, L.M.; Robigou, V. TexAn: Textural analysis of sidescan sonar imagery and generic seafloor characterisation. In Proceedings of the IEEE Oceanic Engineering Society (OCEANS’98), Conference Proceedings (Cat. No.98CH36259), Nice, France, 28 September–1 October 1998; Volume 1, pp. 419–423. [Google Scholar]
- Fakiris, E.; Papatheodorou, G. Sonar Class: A MATLAB toolbox for the classification of side scan sonar imagery, using local textural and reverberational characteristics. In Proceedings of the 3rd International Conference and Exhibition on Underwater Acoustic Measurements, Nafplion, Greece, 21–26 June 2009. [Google Scholar]
- McGonigle, C.; Collier, J.S. Interlinking backscatter, grain size and benthic community structure. Estuar. Coast. Shelf Sci. 2014, 147, 123–136. [Google Scholar] [CrossRef]
- Preston, J.M.; Christney, A.C.; Bloomer, S.F.; Beaudet, I.L. Seabed classification of multibeam sonar images. In Proceedings of the MTS/IEEE Oceans Conference Record (OCEANS 2001), Honolulu, HI, USA, 5–8 November 2001; pp. 2616–2623. [Google Scholar]
- Pace, N.G.; Gao, H. Swathe Seabed Classification. IEEE J. Ocean. Eng. 1988, 13, 83–90. [Google Scholar] [CrossRef]
- Lucieer, V.; Hill, N.A.; Barrett, N.S.; Nichol, S. Do marine substrates “look” and “sound” the same? Supervised classification of multibeam acoustic data using autonomous underwater vehicle images. Estuar. Coast. Shelf Sci. 2013, 117, 94–106. [Google Scholar] [CrossRef]
- Fakiris, E.; Dimas, X.; Georgiou, N.; Christodoulou, D.; Yuri, R.; Papatheodorou, G. Integrating dual frequency side-scan sonar data and multibeam backscatter, angular response and bathymetry, for benthic habitat mapping in the Laganas Gulf MPA, Zakinthos Isl., Greece. J. Acoust. Soc. Am. 2017, 141, 3949. [Google Scholar] [CrossRef]
- Fakiris, E.; Papatheodorou, G.; Geraga, M.; Ferentinos, G. An automatic target detection algorithm for swath Sonar backscatter imagery, using image texture and independent component analysis. Remote Sens. 2016, 8, 373. [Google Scholar] [CrossRef]
- Geraga, M.; Papatheodorou, G.; Ferentinos, G.; Fakiris, E.; Christodoulou, D.; Georgiou, N.; Dimas, X.; Iatrou, M.; Kordella, S.; Sotiropoulos, G.; et al. The study of an ancient shipwreck using marine remote sensing techniques, in Kefalonia Island (Ionian Sea), Greece. Archaeol. Marit. Mediterr. 2015, 12, 183–198. [Google Scholar]
- Porpilho, D.; Klein, A.H.F.; De Camargo, R.S.V.; Prado, M.F.V.; Bonetti, J.; Short, A.; Fakiris, E. Automatic Classification of Bedforms Using Phase Differencing Bathymetric Sonar. In Proceedings of the 2nd International Conference and Exhibition on Underwater Acoustics, Rhodes, Greece, 22–27 June 2014; pp. 22–27. [Google Scholar]
- Haralick, R.M. Statistical and structural approaches to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Fakiris, E.; Papatheodorou, G. Quantification of regions of interest in swath sonar backscatter images using grey-level and shape geometry descriptors: The TargAn software. Mar. Geophys. Res. 2012, 33, 169–183. [Google Scholar] [CrossRef]
- Calder, B. Tackling Modern Multibeam Data with CUBE. In Proceedings of the Corin, Hamburg, Germany, 22–25 November 2004. [Google Scholar]
- Walbridge, S.; Slocum, N.; Pobuda, M.; Wright, D.J. Unified Geomorphological Analysis Workflows with Benthic Terrain Modeler. Geosciences 2018, 8, 94. [Google Scholar] [CrossRef]
- Fonseca, L.; Mayer, L. Remote estimation of surficial seafloor properties through the application Angular Range Analysis to multibeam sonar data. Mar. Geophys. Res. 2007, 28, 119–126. [Google Scholar] [CrossRef]
- Hellequin, L.; Boucher, J.M.; Lurton, X. Processing of high-frequency multibeam echo sounder data for seafloor characterization. IEEE J. Ocean. Eng. 2003, 28, 78–89. [Google Scholar] [CrossRef]
- Alevizos, E.; Snellen, M.; Simons, D.; Siemes, K.; Greinert, J. Multi-angle backscatter classification and sub-bottom profiling for improved seafloor characterization. Mar. Geophys. Res. 2018, 39, 289–306. [Google Scholar] [CrossRef]
- Alevizos, E.; Greinert, J. The Hyper-Angular Cube Concept for Improving the Spatial and Acoustic Resolution of MBES Backscatter Angular Response Analysis. Geosciences 2018, 8, 446. [Google Scholar] [CrossRef]
- Sharon, E.; Galun, M.; Sharon, D.; Basri, R.; Brandt, A. Hierarchy and adaptivity in segmenting visual scenes. Nature 2006, 442, 810–813. [Google Scholar] [CrossRef] [PubMed]
- Kohavi, R.; John, G.H. Wrappers for feature subset selection. Artif. Intell. 1997, 97, 273–324. [Google Scholar] [CrossRef]
- Jackson, D.R.; Richardson, M.D. High-Frequency Seafloor Acoustics; Springer Science & Business Media: Berlin, Germany, 2007; ISBN 978-0-387-34154-5. [Google Scholar]
- Hillman, J.I.T.; Lamarche, G.; Pallentin, A.; Pecher, I.A.; Gorman, A.R.; Schneider von Deimling, J. Validation of automated supervised segmentation of multibeam backscatter data from the Chatham Rise, New Zealand. Mar. Geophys. Res. 2018, 39, 205–227. [Google Scholar] [CrossRef]
- Levin, P.S.; Fogarty, M.J.; Murawski, S.A.; Fluharty, D. Integrated ecosystem assessments: Developing the scientific basis for ecosystem-based management of the ocean. PLoS Biol. 2009, 7, e1000014. [Google Scholar] [CrossRef] [PubMed]
- Douvere, F. The importance of marine spatial planning in advancing ecosystem-based sea use management. Mar. Policy 2008, 32, 762–771. [Google Scholar] [CrossRef]
- Boswarva, K.; Butters, A.; Fox, C.J.; Howe, J.A.; Narayanaswamy, B. Improving marine habitat mapping using high-resolution acoustic data; a predictive habitat map for the Firth of Lorn, Scotland. Cont. Shelf Res. 2018, 168, 39–47. [Google Scholar] [CrossRef]
- Brown, C.J.; Sameoto, J.A.; Smith, S.J. Multiple methods, maps, and management applications: Purpose made seafloor maps in support of ocean management. J. Sea Res. 2012, 72, 1–13. [Google Scholar] [CrossRef]
- Cogan, C.B.; Todd, B.J.; Lawton, P.; Noji, T.T. The role of marine habitat mapping in ecosystem-based management. ICES J. Mar. Sci. 2009, 66, 2033–2042. [Google Scholar] [CrossRef]
- Halpern, B.S.; Lester, S.E.; McLeod, K.L. Placing marine protected areas onto the ecosystem-based management seascape. Proc. Natl. Acad. Sci. USA 2010, 107, 18312–18317. [Google Scholar] [CrossRef] [PubMed]
- Howell, K.L.; Davies, J.S.; Narayanaswamy, B.E. Identifying deep-sea megafaunal epibenthic assemblages for use in habitat mapping and marine protected area network design. J. Mar. Biol. Assoc. UK 2010, 90, 33–68. [Google Scholar] [CrossRef]
- Coll, M.; Piroddi, C.; Albouy, C.; Ben Rais Lasram, F.; Cheung, W.W.L.; Christensen, V.; Karpouzi, V.S.; Guilhaumon, F.; Mouillot, D.; Paleczny, M.; et al. The Mediterranean Sea under siege: Spatial overlap between marine biodiversity, cumulative threats and marine reserves. Glob. Ecol. Biogeogr. 2012, 21, 465–480. [Google Scholar] [CrossRef]
- Le Pape, O.; Delavenne, J.; Vaz, S. Quantitative mapping of fish habitat: A useful tool to design spatialised management measures and marine protected area withfishery objectives. Ocean Coast. Manag. 2014, 87, 8–19. [Google Scholar] [CrossRef]
- Telesca, L.; Belluscio, A.; Criscoli, A.; Ardizzone, G.; Apostolaki, E.T.; Fraschetti, S.; Gristina, M.; Knittweis, L.; Martin, C.S.; Pergent, G.; et al. Seagrass meadows (Posidonia oceanica) distribution and trajectories of change. Sci. Rep. 2015, 5, 1–14. [Google Scholar] [CrossRef] [PubMed]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fakiris, E.; Blondel, P.; Papatheodorou, G.; Christodoulou, D.; Dimas, X.; Georgiou, N.; Kordella, S.; Dimitriadis, C.; Rzhanov, Y.; Geraga, M.; et al. Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece. Remote Sens. 2019, 11, 461. https://doi.org/10.3390/rs11040461
Fakiris E, Blondel P, Papatheodorou G, Christodoulou D, Dimas X, Georgiou N, Kordella S, Dimitriadis C, Rzhanov Y, Geraga M, et al. Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece. Remote Sensing. 2019; 11(4):461. https://doi.org/10.3390/rs11040461
Chicago/Turabian StyleFakiris, Elias, Philippe Blondel, George Papatheodorou, Dimitris Christodoulou, Xenophon Dimas, Nikos Georgiou, Stavroula Kordella, Charalampos Dimitriadis, Yuri Rzhanov, Maria Geraga, and et al. 2019. "Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece" Remote Sensing 11, no. 4: 461. https://doi.org/10.3390/rs11040461
APA StyleFakiris, E., Blondel, P., Papatheodorou, G., Christodoulou, D., Dimas, X., Georgiou, N., Kordella, S., Dimitriadis, C., Rzhanov, Y., Geraga, M., & Ferentinos, G. (2019). Multi-Frequency, Multi-Sonar Mapping of Shallow Habitats—Efficacy and Management Implications in the National Marine Park of Zakynthos, Greece. Remote Sensing, 11(4), 461. https://doi.org/10.3390/rs11040461