A Novel Method for the Absolute Pose Problem with Pairwise Constraints

 , ,
, ,  ,
,
Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- We use novel pairwise constraints to decouple the rotation and translation subproblems, which can then be efficiently solved sequentially. The dimensionality of the two subproblems are lower than that of the original problem; therefore, searching the exact solution of each subproblem is easier than searching the exact solution of the original problem.
- The proposed method is more robust than very recent heuristic methods [11]. The decoupled subproblems are solved by applied BnB algorithm, which is a global optimization algorithm, to obtain the globally optimal rotation and translation to their corresponding subproblems.
2. Related Work
3. Method
3.1. Problem Formulation
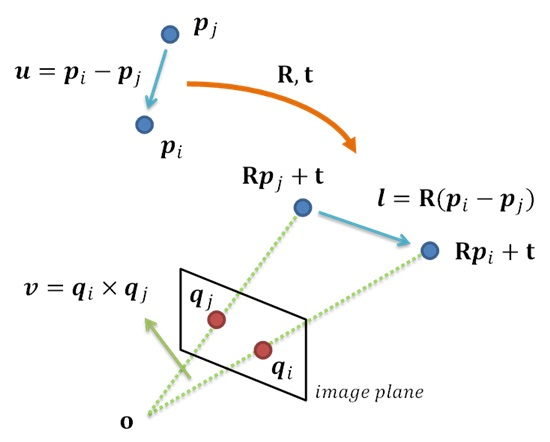
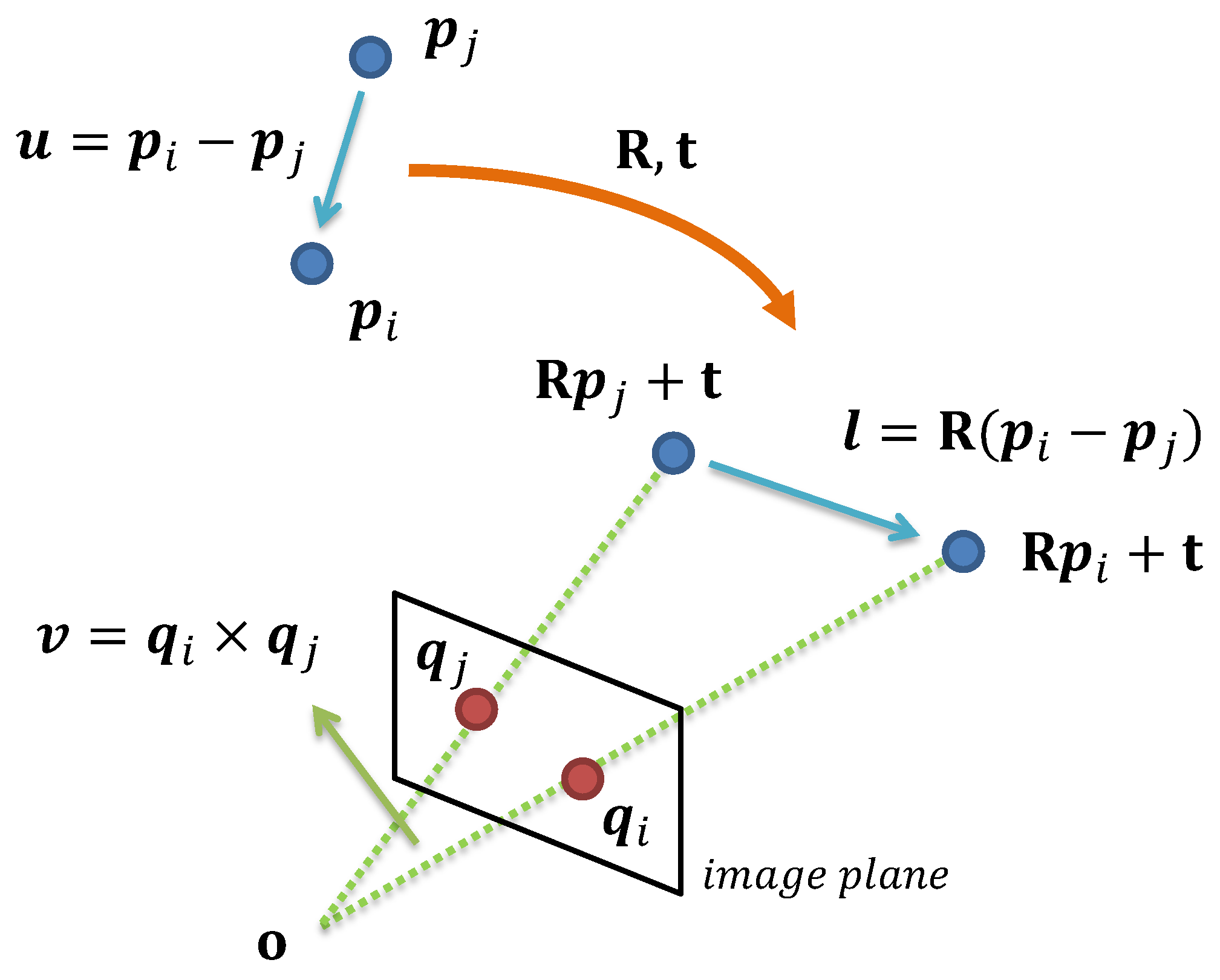
3.2. Eliminating Translation by Means of Pairwise Constraints
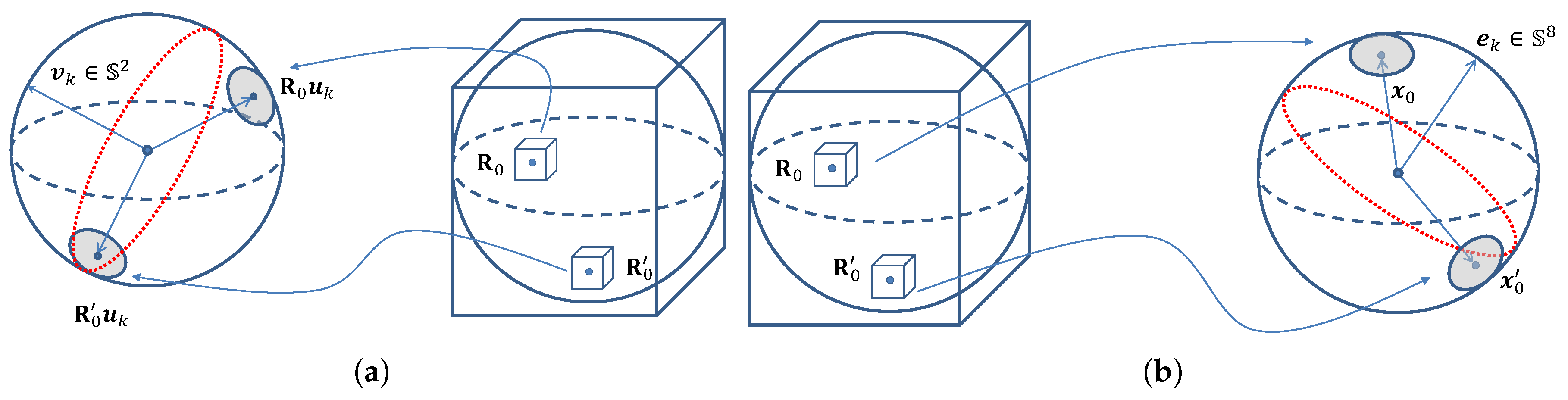
3.3. Global SO(3) Search
| Algorithm 1 BnB algorithm for obtaining the rotation. |
| Require: Correspondence pairs and inlier threshold. |
|
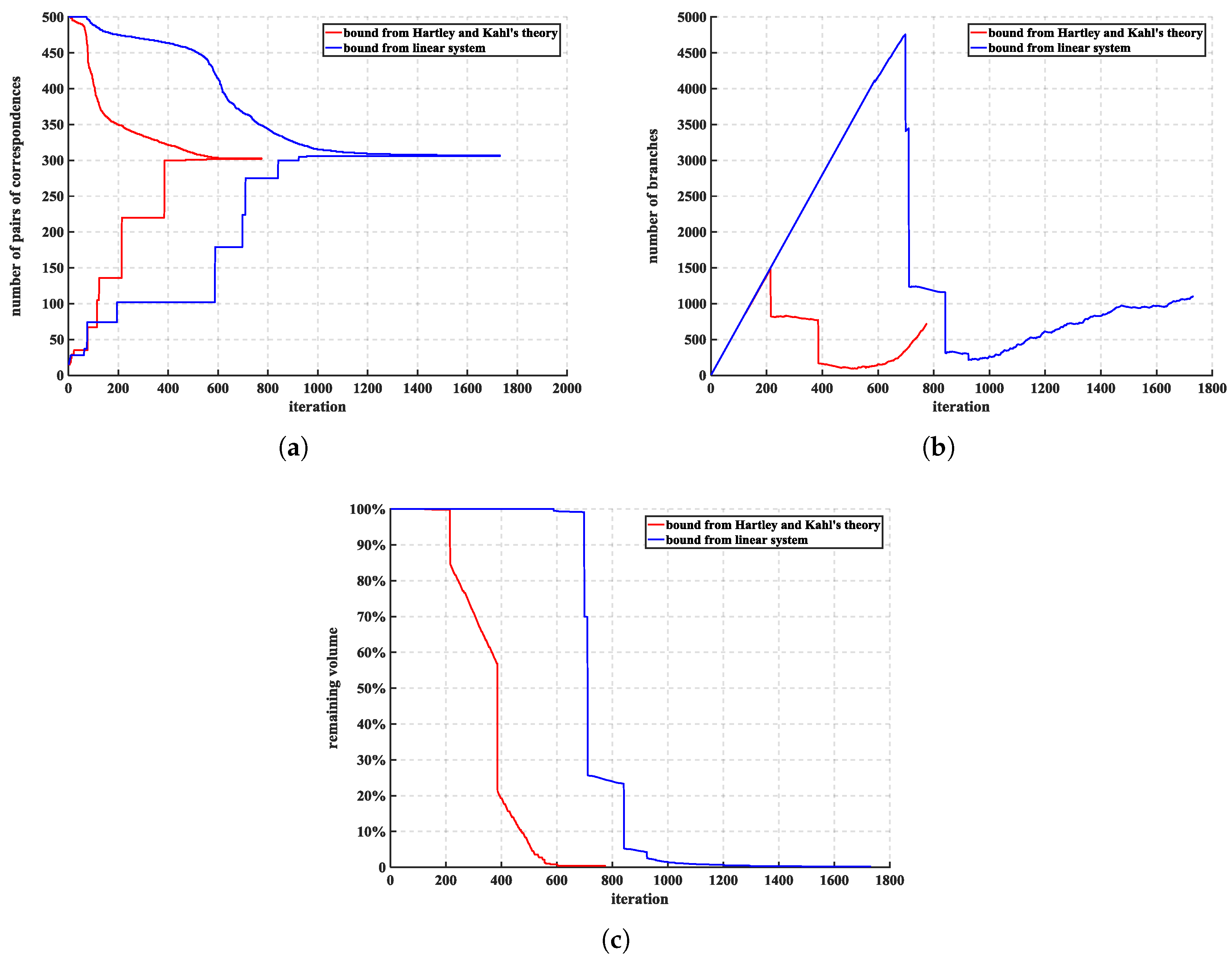
3.3.1. Bounds from Hartley and Kahl’s Theory
3.3.2. Bounds Derived from A Linear System Formulation
3.4. Global Translation Search
4. Experiments
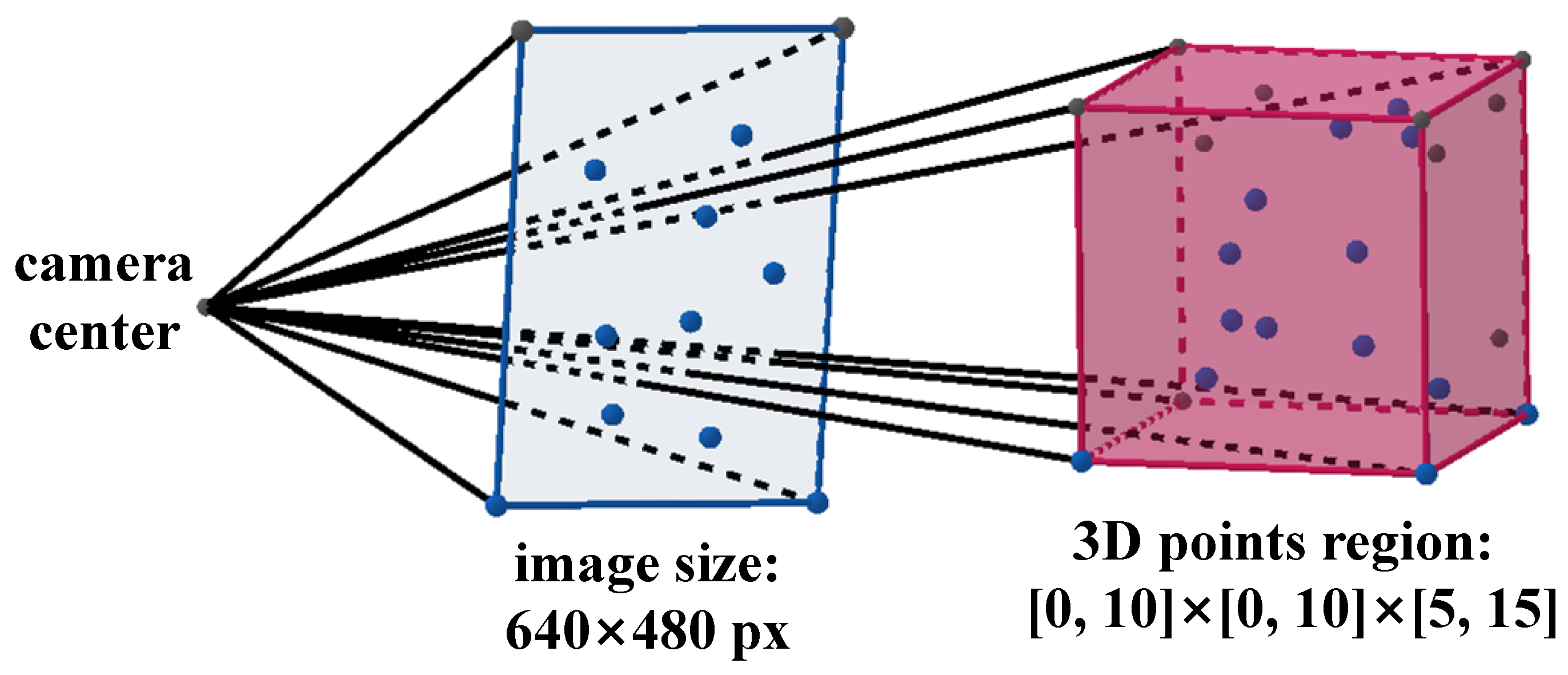
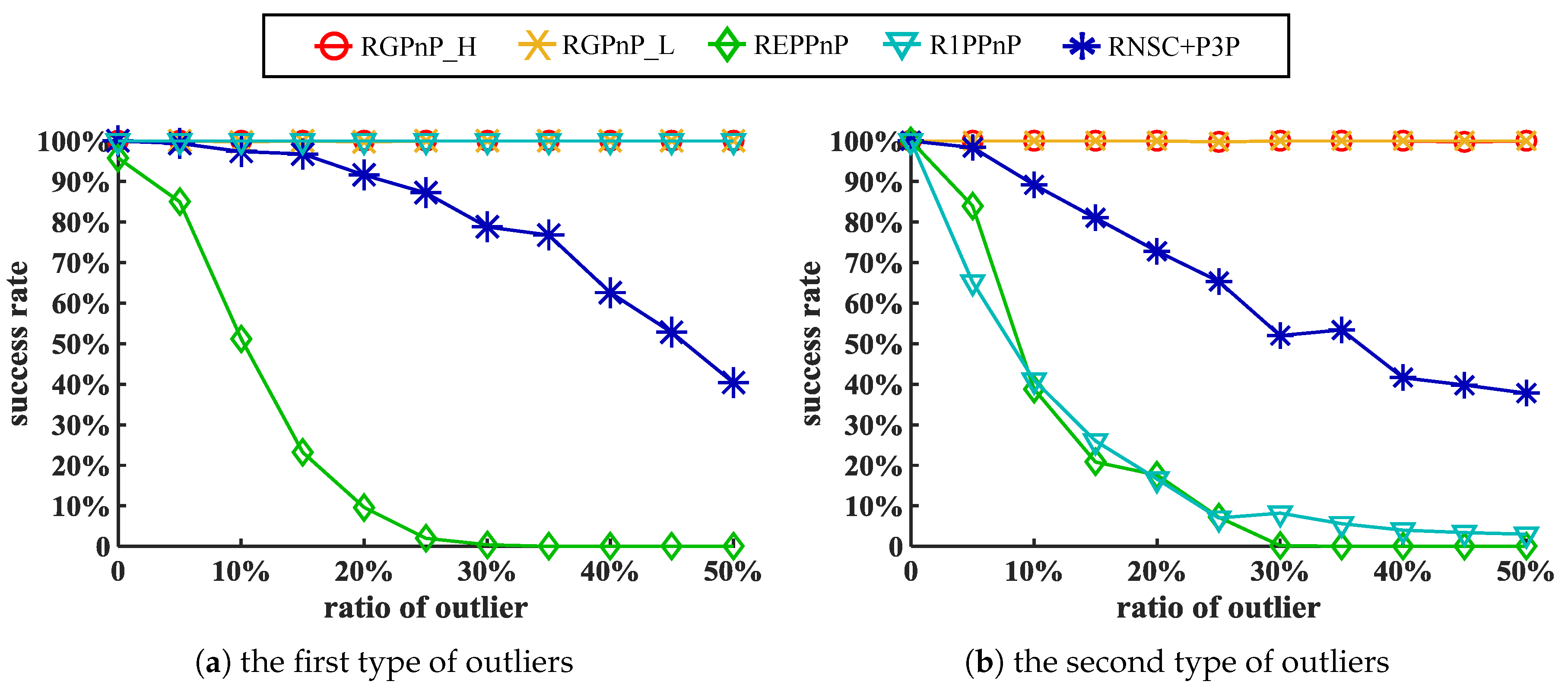
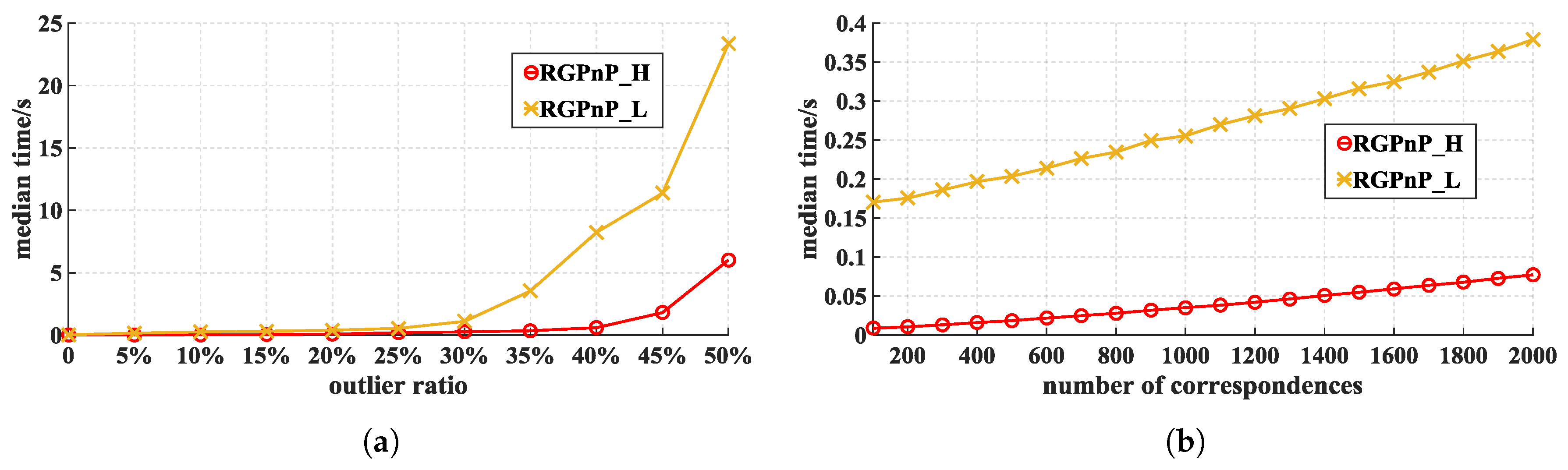
4.1. Experiments with Synthetic Data
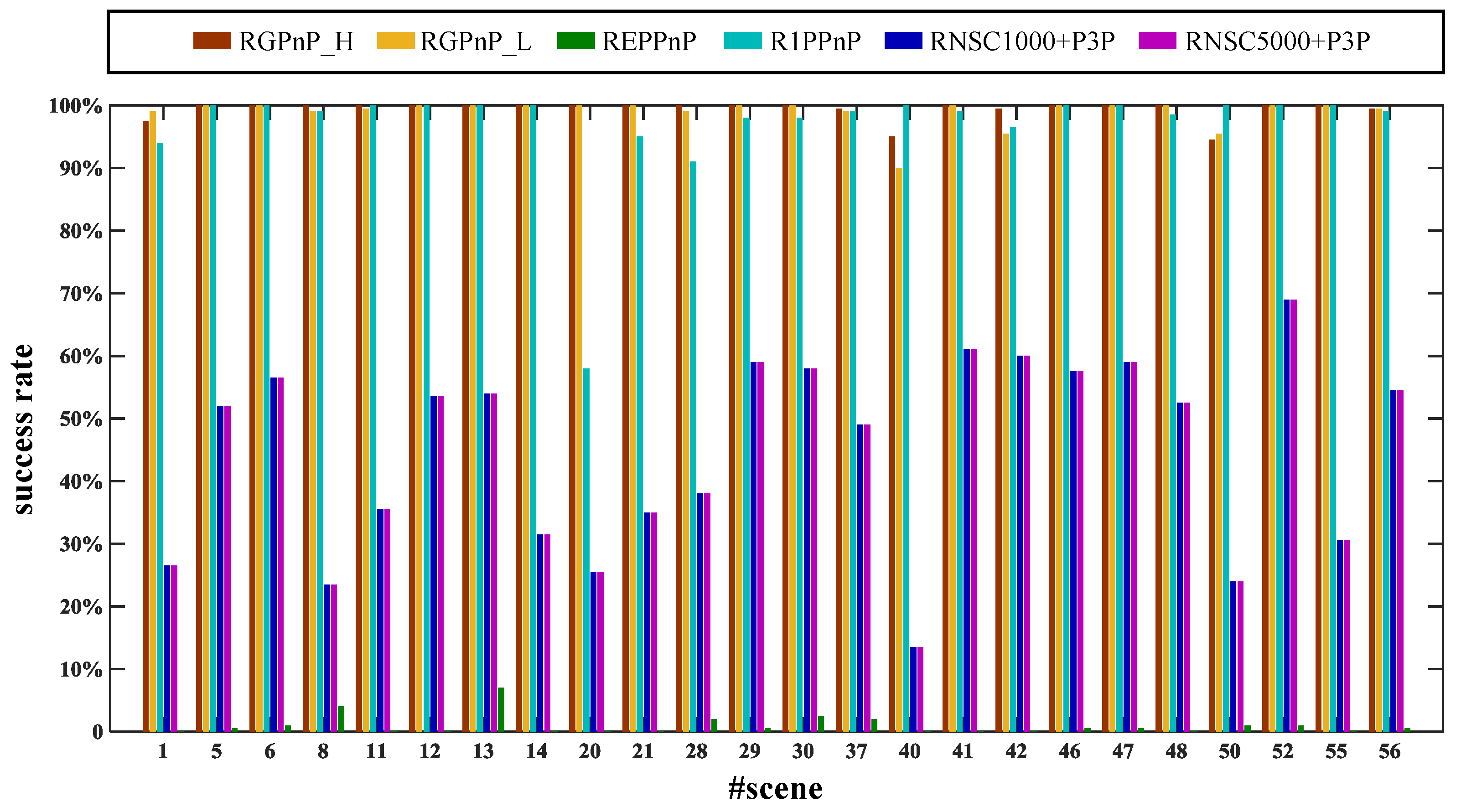
4.2. Experiments with Real-World Data
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Campbell, D.J.; Petersson, L.; Kneip, L.; Li, H. Globally-Optimal Inlier Set Maximisation for Camera Pose and Correspondence Estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2018. [Google Scholar] [CrossRef] [PubMed]
- Grigorescu, S.M.; Macesanu, G.; Cocias, T.T.; Puiu, D.; Moldoveanu, F. Robust Camera Pose and Scene Structure Analysis for Service Robotics. Robot. Auton. Syst. 2011, 59, 899–909. [Google Scholar] [CrossRef]
- Putra, E.Y.; Wahyudi, A.K.; Dumingan, C. A proposed combination of photogrammetry, Augmented Reality and Virtual Reality Headset for heritage visualisation. In Proceedings of the 2016 International Conference on Informatics and Computing (ICIC), Mataram, Indonesia, 28–29 October 2016; pp. 43–48. [Google Scholar]
- Autran, C.; Guéna, F. 3D reconstruction of a disappeared museum. In Proceedings of the 2014 International Conference on Virtual Systems Multimedia (VSMM), Hong Kong, China, 9–12 December 2014; pp. 6–11. [Google Scholar]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An Accurate O(n) Solution to the PnP Problem. Int. J. Comput. Vis. 2009, 81, 155–166. [Google Scholar] [CrossRef]
- Taira, H.; Okutomi, M.; Sattler, T.; Cimpoi, M.; Pollefeys, M.; Sivic, J.; Pajdla, T.; Torii, A. InLoc: Indoor Visual Localization with Dense Matching and View Synthesis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 7199–7209. [Google Scholar]
- Sattler, T.; Leibe, B.; Kobbelt, L. Efficient and Effective Prioritized Matching for Large-Scale Image-Based Localization. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1744–1756. [Google Scholar] [CrossRef] [PubMed]
- Guidi, G.; Beraldin, J.; Atzeni, C. High-accuracy 3D modeling of cultural heritage: the digitizing of Donatello’s “Maddalena”. IEEE Trans. Image Process. 2004, 13, 370–380. [Google Scholar] [CrossRef] [PubMed]
- Hess, M.; Petrovic, V.; Meyer, D.; Rissolo, D.; Kuester, F. Fusion of multimodal three-dimensional data for comprehensive digital documentation of cultural heritage sites. In Proceedings of the 2015 Digital Heritage, Granada, Spain, 28 September–2 October 2015; Volume 2, pp. 595–602. [Google Scholar] [CrossRef]
- Marchand, E.; Uchiyama, H.; Spindler, F. Pose Estimation for Augmented Reality: A Hands-On Survey. IEEE Trans. Vis. Comput. Graph. 2016, 22, 2633–2651. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Zhang, T.; Jayender, J. Re-weighting and 1-Point RANSAC-Base PnP Solution to Handle Outliers. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 3022–3033. [Google Scholar] [CrossRef] [PubMed]
- Svarm, L.; Enqvist, O.; Kahl, F.; Oskarsson, M. City-Scale Localization for Cameras with Known Vertical Direction. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1455–1461. [Google Scholar] [CrossRef] [PubMed]
- Enqvist, O.; Kahl, F. Robust Optimal Pose Estimation. In Proceedings of the 10th European Conference on Computer Vision (ECCV), Marseille, France, 12–18 October 2008; pp. 141–153. [Google Scholar]
- Enqvist, O.; Ask, E.; Kahl, F.; Astrom, K. Robust Fitting for Multiple View Geometry. In Proceedings of the 12th European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; pp. 738–751. [Google Scholar]
- Wilcox, R. Introduction to Robust Estimation and Hypothesis Testing, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 1997. [Google Scholar]
- Speciale, P.; Paudel, D.P.; Oswald, M.R.; Kroeger, T.; Gool, L.V.; Pollefeys, M. Consensus Maximization with Linear Matrix Inequality Constraints. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, Hi, USA, 21–26 July 2017; pp. 5048–5056. [Google Scholar]
- Chin, T.; Suter, D.; Medioni, G.; Dickinson, S. The Maximum Consensus Problem: Recent Algorithmic Advances; Morgan & Claypool Publishers: San Rafael, CA, USA, 2017. [Google Scholar]
- Cai, Z.; Chin, T.J.; Le, H.; Suter, D. Deterministic Consensus Maximization with Biconvex Programming. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 685–700. [Google Scholar]
- Chin, T.J.; Cai, Z.; Neumann, F. Robust fitting in computer vision: Easy or hard? In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 701–716. [Google Scholar]
- Enqvist, O.; Ask, E.; Kahl, F.; Astrom, K. Tractable Algorithms for Robust Model Estimation. Int. J. Comput. Vis. 2015, 112, 115–129. [Google Scholar] [CrossRef]
- Erickson, J.; Har-Peled, S.; Mount, D.M. On the Least Median Square Problem. Discret. Comput. Geom. 2006, 36, 593–607. [Google Scholar] [CrossRef]
- Bold, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Hartley, R.; Trumpf, J.; Dai, Y.; Li, H. Rotation Averaging. Int. J. Comput. Vis. 2013, 103, 267–305. [Google Scholar] [CrossRef]
- Zheng, Y.; Kuang, Y.; Sugimoto, S.; Åström, K.; Okutomi, M. Revisiting the PnP Problem: A Fast, General and Optimal Solution. In Proceedings of the 2013 IEEE International Conference on Computer Vision (ICCV), Sydney, NSW, Australia, 1–8 December 2013; pp. 2344–2351. [Google Scholar]
- Kneip, L.; Li, H.; Seo, Y. UPnP: An Optimal O(n) Solution to the Absolute Pose Problem with Universal Applicability. In Proceedings of the 13th European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 127–142. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Raguram, R.; Chum, O.; Pollefeys, M.; Matas, J.; Frahm, J. USAC: A Universal Framework for Random Sample Consensus. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 2022–2038. [Google Scholar] [CrossRef] [PubMed]
- Li, H. Consensus set maximization with guaranteed global optimality for robust geometry estimation. In Proceedings of the IEEE 12th International Conference on Computer Vision (ICCV), Kyoto, Japan, 29 September–2 October 2009; pp. 1074–1080. [Google Scholar]
- Ferraz, L.; Binefa, X.; Moreno-Noguer, F. Very Fast Solution to the PnP Problem with Algebraic Outlier Rejection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014; pp. 501–508. [Google Scholar]
- Camposeco, F.; Sattler, T.; Cohen, A.; Geiger, A.; Pollefeys, M. Toroidal Constraints for Two-Point Localization Under High Outlier Ratios. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 September 2017; pp. 4545–4553. [Google Scholar]
- Larsson, V.; Fredriksson, J.; Toft, C.; Kahl, F. Outlier Rejection for Absolute Pose Estimation with Known Orientation. In Proceedings of the British Machine Vision Conference, York, UK, 19–22 September 2016. [Google Scholar]
- Olsson, C.; Kahl, F.; Oskarsson, M. Branch-and-Bound Methods for Euclidean Registration Problems. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 783–794. [Google Scholar] [CrossRef] [PubMed]
- Briales, J.; Gonzalez-Jimenez, J. Convex Global 3D Registration with Lagrangian Duality. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 September 2017; pp. 4960–4969. [Google Scholar]
- Hartley, R.I.; Kahl, F. Global Optimization Through Rotation Space Search. Int. J. Comput. Vis. 2009, 82, 64–79. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. (T-PAMI) 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Hartley, R. The 3D–3D Registration Problem Revisited. In Proceedings of the IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–8. [Google Scholar]
- Parra Bustos, A.; Chin, T.; Eriksson, A.; Li, H.; Suter, D. Fast Rotation Search with Stereographic Projections for 3D Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2227–2240. [Google Scholar] [CrossRef] [PubMed]
- Straub, J.; Campbell, T.; How, J.P.; Fisher, J.W. Efficient Global Point Cloud Alignment Using Bayesian Nonparametric Mixtures. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 September 2017; pp. 2403–2412. [Google Scholar]
- Ke, T.; Roumeliotis, S.I. An Efficient Algebraic Solution to the Perspective-Three-Point Problem. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 September 2017; pp. 7225–7233. [Google Scholar]
- Chin, T.; Purkait, P.; Eriksson, A.; Suter, D. Efficient Globally Optimal Consensus Maximisation with Tree Search. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 758–772. [Google Scholar] [CrossRef] [PubMed]
- Huynh, D.Q. Metrics for 3D Rotations: Comparison and Analysis. J. Math. Imaging Vis. 2009, 35, 155–164. [Google Scholar] [CrossRef]
- Aanæs, H.; Dahl, A.L.; Steenstrup Pedersen, K. Interesting Interest Points. Int. J. Comput. Vis. 2012, 97, 18–35. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Li, X.; Wang, M.; Knoll, A.; Chen, G.; Song, Z. A Novel Method for the Absolute Pose Problem with Pairwise Constraints. Remote Sens. 2019, 11, 3007. https://doi.org/10.3390/rs11243007
Liu Y, Li X, Wang M, Knoll A, Chen G, Song Z. A Novel Method for the Absolute Pose Problem with Pairwise Constraints. Remote Sensing. 2019; 11(24):3007. https://doi.org/10.3390/rs11243007
Chicago/Turabian StyleLiu, Yinlong, Xuechen Li, Manning Wang, Alois Knoll, Guang Chen, and Zhijian Song. 2019. "A Novel Method for the Absolute Pose Problem with Pairwise Constraints" Remote Sensing 11, no. 24: 3007. https://doi.org/10.3390/rs11243007
APA StyleLiu, Y., Li, X., Wang, M., Knoll, A., Chen, G., & Song, Z. (2019). A Novel Method for the Absolute Pose Problem with Pairwise Constraints. Remote Sensing, 11(24), 3007. https://doi.org/10.3390/rs11243007