Bathymetry of Northwest Greenland Using “Ocean Melting Greenland” (OMG) High-Resolution Airborne Gravity and Other Data



Abstract
1. Introduction
2. Data and Methods
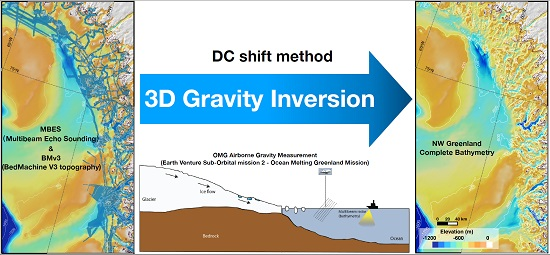
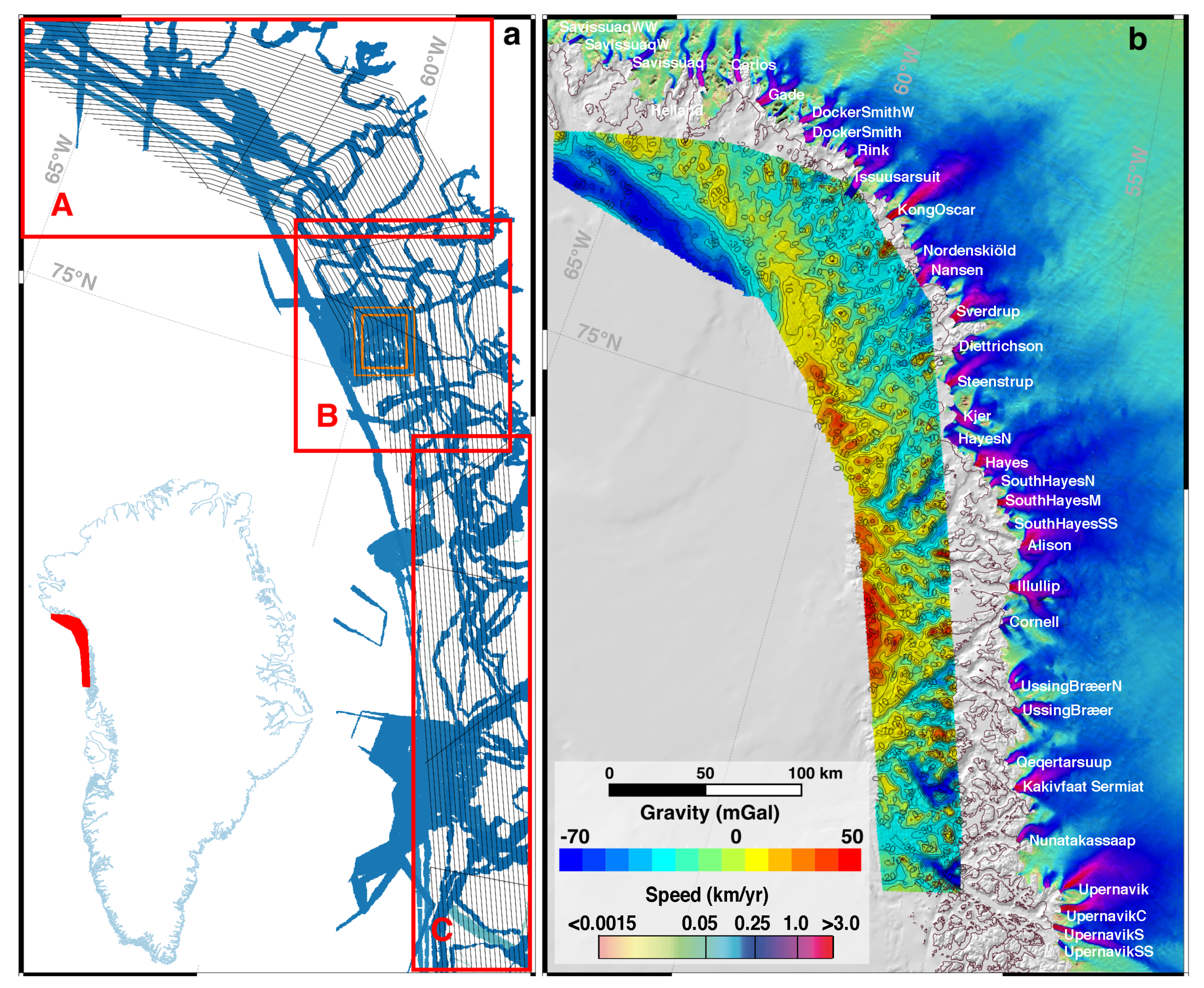
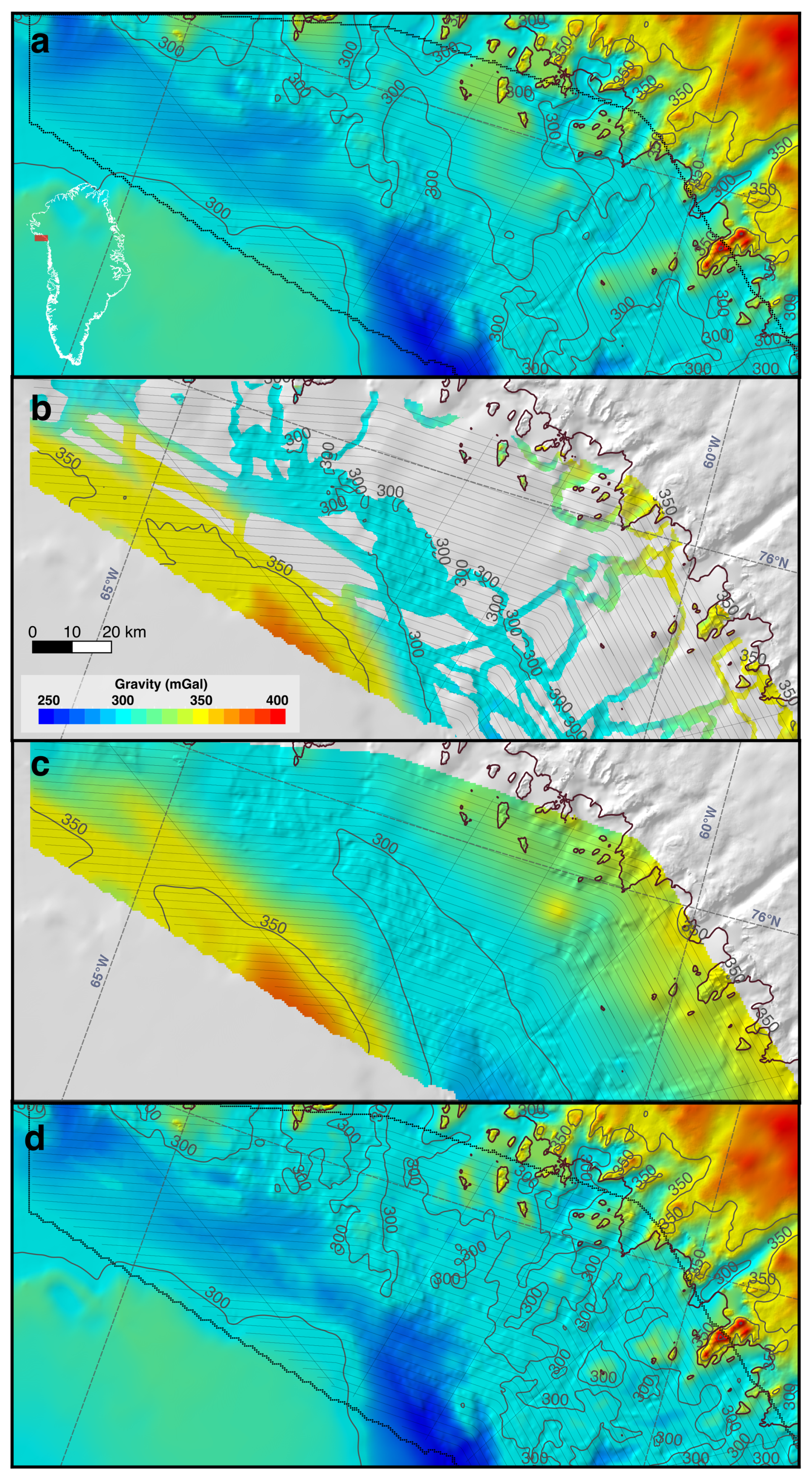
2.1. Airborne Gravity Data
2.2. Multibeam Echo Sounding Data
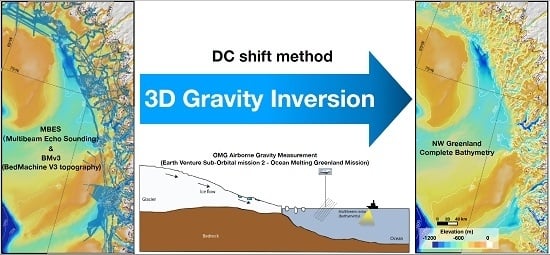
2.3. Inversion Methods
2.4. Error in Bed Elevation
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rignot, E.; Velicogna, I.; Van Den Broeke, M.R.; Monaghan, A.; Lenaerts, J. Acceleration of the contribution of the Greenland and Antarctic ice sheets to sea level rise. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Shepherd, A.; Ivins, E.R.; Geruo, A.; Barletta, V.R.; Bentley, M.J.; Bettadpur, S.; Briggs, K.H.; Bromwich, D.H.; Forsberg, R.; Galin, N.; et al. A Reconciled Estimate of Ice-Sheet Mass Balance. Science 2012, 338, 1183–1189. [Google Scholar] [CrossRef]
- Van den Broeke, M.R.; Enderlin, E.M.; Howat, I.M.; Kuipers Munneke, P.; Noël, B.P.Y.; van de Berg, W.J.; van Meijgaard, E.; Wouters, B. On the recent contribution of the Greenland ice sheet to sea level change. Cryosphere 2016, 10, 1933–1946. [Google Scholar] [CrossRef]
- McMillan, M.; Leeson, A.; Shepherd, A.; Briggs, K.; Armitage, T.; Hogg, A.; Munneke, P.K.; Broeke, M.V.D.; Noël, B.; Berg, W.J.V.D.; et al. A high resolution record of Greenland mass balance. Geophys. Res. Lett. 2016, 7002–7010. [Google Scholar] [CrossRef]
- Velicogna, I.; Sutterley, T.C.; Van Den Broeke, M.R. Regional acceleration in ice mass loss from Greenland and Antarctica using GRACE time-variable gravity data. Geophys. Res. Lett. 2014, 41, 8130–8137. [Google Scholar] [CrossRef]
- Rignot, E.; Kanagaratnam, P. Changes in the Velocity Structure of the Greenland Ice Sheet. Science 2006, 311, 986–990. [Google Scholar] [CrossRef] [PubMed]
- Holland, D.M.; Thomas, R.H.; de Young, B.; Ribergaard, M.H.; Lyberth, B. Acceleration of Jakobshavn Isbræ triggered by warm subsurface ocean waters. Nat. Geosci. 2008, 1, 659–664. [Google Scholar] [CrossRef]
- Motyka, R.J.; Truffer, M.; Fahnestock, M.; Mortensen, J.; Rysgaard, S.; Howat, I. Submarine melting of the 1985 Jakobshavn Isbræ floating tongue and the triggering of the current retreat. J. Geophys. Res. Earth Surf. 2011, 116. [Google Scholar] [CrossRef]
- Rignot, E.; Fenty, I.; Menemenlis, D.; Xu, Y. Spreading of warm ocean waters around Greenland as a possible cause for glacier acceleration. Ann. Glaciol. 2012, 53, 257–266. [Google Scholar] [CrossRef]
- Murray, T.; Scharrer, K.; James, T.D.; Dye, S.R.; Hanna, E.; Booth, A.D.; Selmes, N.; Luckman, A.; Hughes, A.L.C.; Cook, S.; et al. Ocean regulation hypothesis for glacier dynamics in southeast Greenland and implications for ice sheet mass changes. J. Geophys. Res. Earth Surf. 2010, 115. [Google Scholar] [CrossRef]
- Straneo, F.; Sutherland, D.A.; Holland, D.; Gladish, C.; Hamilton, G.S.; Johnson, H.L.; Rignot, E.; Xu, Y.; Koppes, M. Characteristics of ocean waters reaching greenland’s glaciers. Ann. Glaciol. 2012, 53, 202–210. [Google Scholar] [CrossRef]
- Straneo, F.; Heimbach, P. North Atlantic warming and the retreat of Greenland’s outlet glaciers. Nature 2013, 504, 36–43. [Google Scholar] [CrossRef] [PubMed]
- Morlighem, M.; Rignot, E.; Mouginot, J.; Seroussi, H.; Larour, E. Deeply incised submarine glacial valleys beneath the Greenland ice sheet. Nat. Geosci. 2014, 7, 18–22. [Google Scholar] [CrossRef]
- Fenty, I.; Willis, J.; Khazendar, A.; Dinardo, S.; Forsberg, R.; Fukumori, I.; Holland, D.; Jakobsson, M.; Moller, D.; Morison, J.; et al. Oceans Melting Greenland: Early Results from NASA’s Ocean-Ice Mission in Greenland. Oceanography 2016, 29, 72–83. [Google Scholar] [CrossRef]
- Morlighem, M.; Rignot, E.; Willis, J. Improving Bed Topography Mapping of Greenland Glaciers Using NASA’s Oceans Melting Greenland (OMG) Data. Oceanography 2016, 29, 62–71. [Google Scholar] [CrossRef]
- Jakobsson, M.; Mayer, L.; Coakley, B.; Dowdeswell, J.A.; Forbes, S.; Fridman, B.; Hodnesdal, H.; Noormets, R.; Pedersen, R.; Rebesco, M.; et al. The International Bathymetric Chart of the Arctic Ocean (IBCAO) Version 3.0. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef]
- Morlighem, M.; Williams, C.N.; Rignot, E.; An, L.; Arndt, J.E.; Bamber, J.L.; Catania, G.; Chauché, N.; Dowdeswell, J.A.; Dorschel, B.; et al. BedMachine v3: Complete Bed Topography and Ocean Bathymetry Mapping of Greenland from Multibeam Echo Sounding Combined with Mass Conservation. Geophys. Res. Lett. 2017, 44, 11051–11061. [Google Scholar] [CrossRef] [PubMed]
- Greenbaum, J.S.; Blankenship, D.D.; Young, D.A.; Richter, T.G.; Roberts, J.L.; Aitken, A.R.A.; Legresy, B.; Schroeder, D.M.; Warner, R.C.; van Ommen, T.D.; et al. Ocean access to a cavity beneath Totten Glacier in East Antarctica. Nat. Geosci. 2015, 8, 294–298. [Google Scholar] [CrossRef]
- Gourlet, P.; Rignot, E.; Rivera, A.; Casassa, G. Ice thickness of the northern half of the Patagonia Icefields of South America from high-resolution airborne gravity surveys. Geophys. Res. Lett. 2016, 43, 241–249. [Google Scholar] [CrossRef]
- An, L.; Rignot, E.; Elieff, S.; Morlighem, M.; Millan, R.; Mouginot, J.; Holland, D.M.; Holland, D.; Paden, J. Bed elevation of Jakobshavn Isbrae, West Greenland, from high-resolution airborne gravity and other data. Geophys. Res. Lett. 2017, 44, 3728–3736. [Google Scholar] [CrossRef]
- Millan, R.; Rignot, E.; Mouginot, J.; Wood, M.; Bjørk, A.A.; Morlighem, M. Vulnerability of Southeast Greenland Glaciers to Warm Atlantic Water from Operation IceBridge and Ocean Melting Greenland Data. Geophys. Res. Lett. 2018, 45, 2688–2696. [Google Scholar] [CrossRef] [PubMed]
- Argyle, M.; Ferguson, S.; Sander, L.; Sander, S. AIRGrav results: A comparison of airborne gravity survey data. In SEG Technical Program Expanded Abstracts 2000; Society of Exploration Geophysicists: Tulsa, OK, USA, 2000; pp. 435–437. [Google Scholar]
- Sander, S.; Argyle, M.; Elieff, S.; Ferguson, S.; Lavoie, V.; Sander, L. The AIRGrav airborne gravity system. CSEG Rec. 2005, 30, 32–36. [Google Scholar]
- OMG Mission. Conductivity, Temperature and Depth (CTD) Data from the Ocean Survey, Verion 0.1; OMG SDS: Pasadena, CA, USA, 2016. [Google Scholar]
- Chen, C.; Millero, F.J. Speed of sound in seawater at high pressures. J. Acoust. Soc. Am. 1977, 62, 1129–1135. [Google Scholar] [CrossRef]
- Parker, R. The rapid calcuation of potential anomalies. Geophys. J. 1973, 31, 447–455. [Google Scholar] [CrossRef]
- Tinto, K.J.; Bell, R.E. Progressive unpinning of Thwaites Glacier from newly identified offshore ridge: Constraints from aerogravity. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Muto, A.; Anandakrishnan, S.; Alley, R.B. Subglacial bathymetry and sediment layer distribution beneath the Pine Island Glacier ice shelf, West Antarctica, modeled using aerogravity and autonomous underwater vehicle data. Ann. Glaciol. 2013, 54, 27–32. [Google Scholar] [CrossRef]
- Wood, M.; Rignot, E.; Fenty, I.; Menemenlis, D.; Millan, R.; Morlighem, M.; Mouginot, J.; Seroussi, H. Ocean-induced melt triggers glacier retreat in Northwest Greenland. Geophys. Res. Lett. 2018, 45, 8334–8342. [Google Scholar] [CrossRef]
- Syvitski, J.; Burrell, D.; Skei, J. Fjords: Processes and Products; Springer: New York, NY, USA, 1987. [Google Scholar]
- Dowdeswell, J.; Whittington, R.; Marienfeld, P. The origin of massive diamicton facies by iceberg rafting and scouring, Scoresby Sund, East Greenland. Sedimentology 1994, 41, 21–35. [Google Scholar] [CrossRef]
- Dowdeswell, J.A.; Batchelor, C.L.; Hogan, K.A.; Schenke, H.W. Nordvestfjord: A major East Greenland fjord system. Geol. Soc. Lond. Mem. 2016, 46, 43–44. [Google Scholar] [CrossRef]
- Hjelstuen, B.O.; Kjennbakken, H.; Bleikli, V.; Ersland, R.A.; Kvilhaug, S.; Euler, C.; Alvheim, S. Fjord stratigraphy and processes—Evidence from the NE Atlantic Fensfjorden system. J. Quat. Sci. 2013, 28, 421–432. [Google Scholar] [CrossRef]
- Batcherlor, C.L.; Dowdeswell, J.A.; Rignot, E. Submarine landforms reveal varying rates and styles of deglaciation in North-West Greenland fjords. Mar. Geol. 2017, 402, 60–80. [Google Scholar] [CrossRef]
- Slabon, P.; Dorschel, B.; Jokat, W.; Myklebust, R.; Hebbeln, D.; Gebhardt, C. Greenland ice sheet retreat history in the northeast Baffin Bay based on high-resolution bathymetry. Quat. Sci. Rev. 2016, 154, 182–198. [Google Scholar] [CrossRef]
- Rignot, E.; Fenty, I.; Xu, Y.; Cai, C.; Velicogna, I.; Cofaigh, C.; Dowdeswell, J.A.; Weinrebe, W.; Catania, G.; Duncan, D. Bathymetry data reveal glaciers vulnerable to ice-ocean interaction in Uummannaq and Vaigat glacial fjords, west Greenland. Geophys. Res. Lett. 2016, 43, 2667–2674. [Google Scholar] [CrossRef]
- Pedersen, M.; Weng, W.L.; Keulen, N.; Kokfelt, T.F. A new seamless digital 1:500,000 scale geological map of Greenland. Geol. Surv. Den. Greenl. Bull. 2013, 28, 65–68. [Google Scholar]
- Batchelor, C.L.; Dowdeswell, J.A. Lateral shear-moraines and lateral marginal-moraines of palaeo-ice streams. Quat. Sci. Rev. 2016, 151, 1–26. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
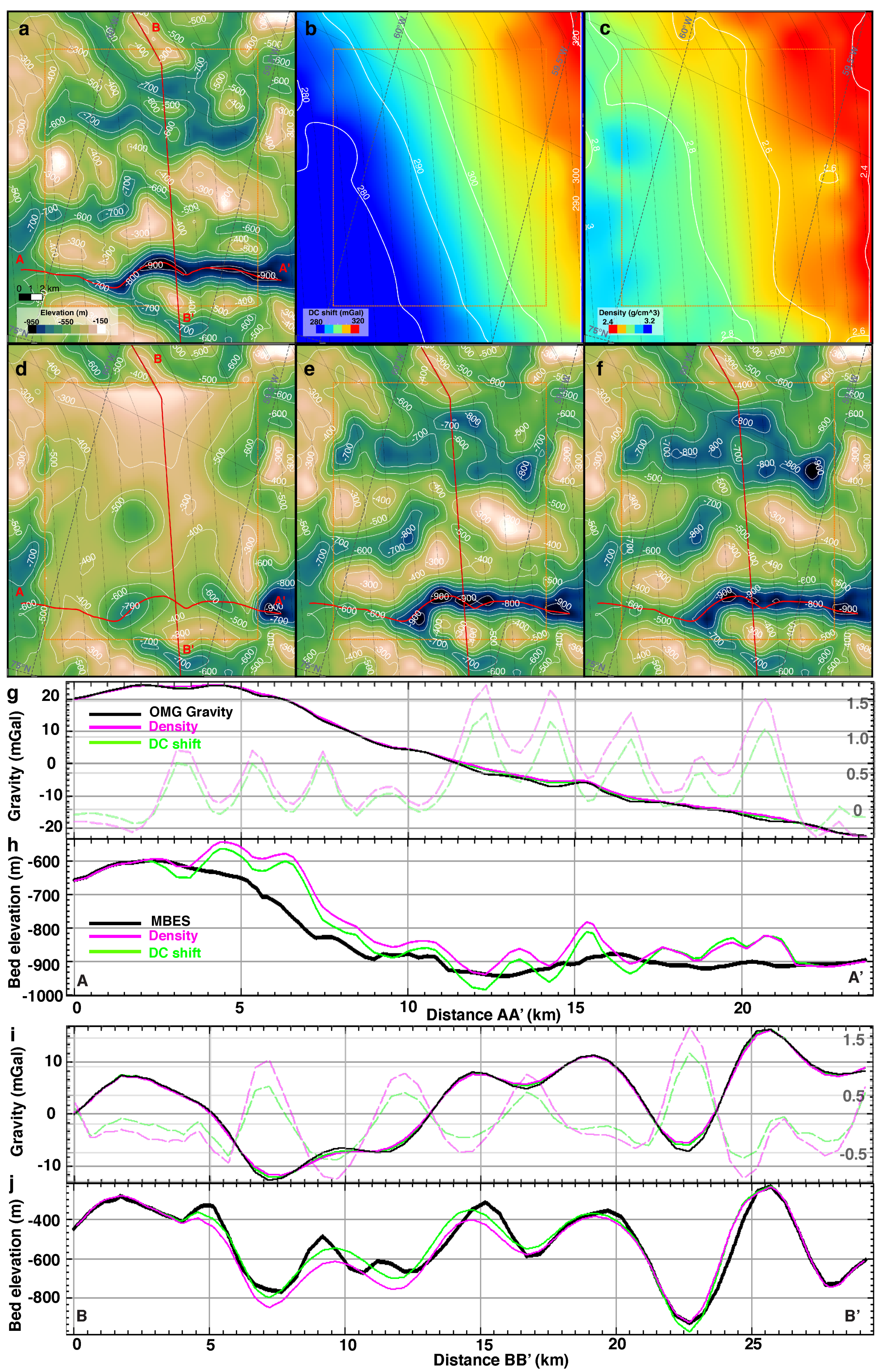
| Profile | Inversion | Mean (m) ± Standard Deviation (m) |
|---|---|---|
| A-A | DC shift | 32.7 ±46.4 |
| A-A | Density | 50.5 ± 47.4 |
| B-B | DC shift | 2.7 ± 39.0 |
| B-B | Density | −20.5 ± 49.6 |
| Total | DC shift | −13.1 ± 62.1 |
| Total | Density | −41.2 ± 67.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, L.; Rignot, E.; Millan, R.; Tinto, K.; Willis, J. Bathymetry of Northwest Greenland Using “Ocean Melting Greenland” (OMG) High-Resolution Airborne Gravity and Other Data. Remote Sens. 2019, 11, 131. https://doi.org/10.3390/rs11020131
An L, Rignot E, Millan R, Tinto K, Willis J. Bathymetry of Northwest Greenland Using “Ocean Melting Greenland” (OMG) High-Resolution Airborne Gravity and Other Data. Remote Sensing. 2019; 11(2):131. https://doi.org/10.3390/rs11020131
Chicago/Turabian StyleAn, Lu, Eric Rignot, Romain Millan, Kirsty Tinto, and Josh Willis. 2019. "Bathymetry of Northwest Greenland Using “Ocean Melting Greenland” (OMG) High-Resolution Airborne Gravity and Other Data" Remote Sensing 11, no. 2: 131. https://doi.org/10.3390/rs11020131
APA StyleAn, L., Rignot, E., Millan, R., Tinto, K., & Willis, J. (2019). Bathymetry of Northwest Greenland Using “Ocean Melting Greenland” (OMG) High-Resolution Airborne Gravity and Other Data. Remote Sensing, 11(2), 131. https://doi.org/10.3390/rs11020131