The Potential for Discriminating Microphysical Processes in Numerical Weather Forecasts Using Airborne Polarimetric Radio Occultations

 , , ,
, , ,  and
and
Abstract
1. Introduction
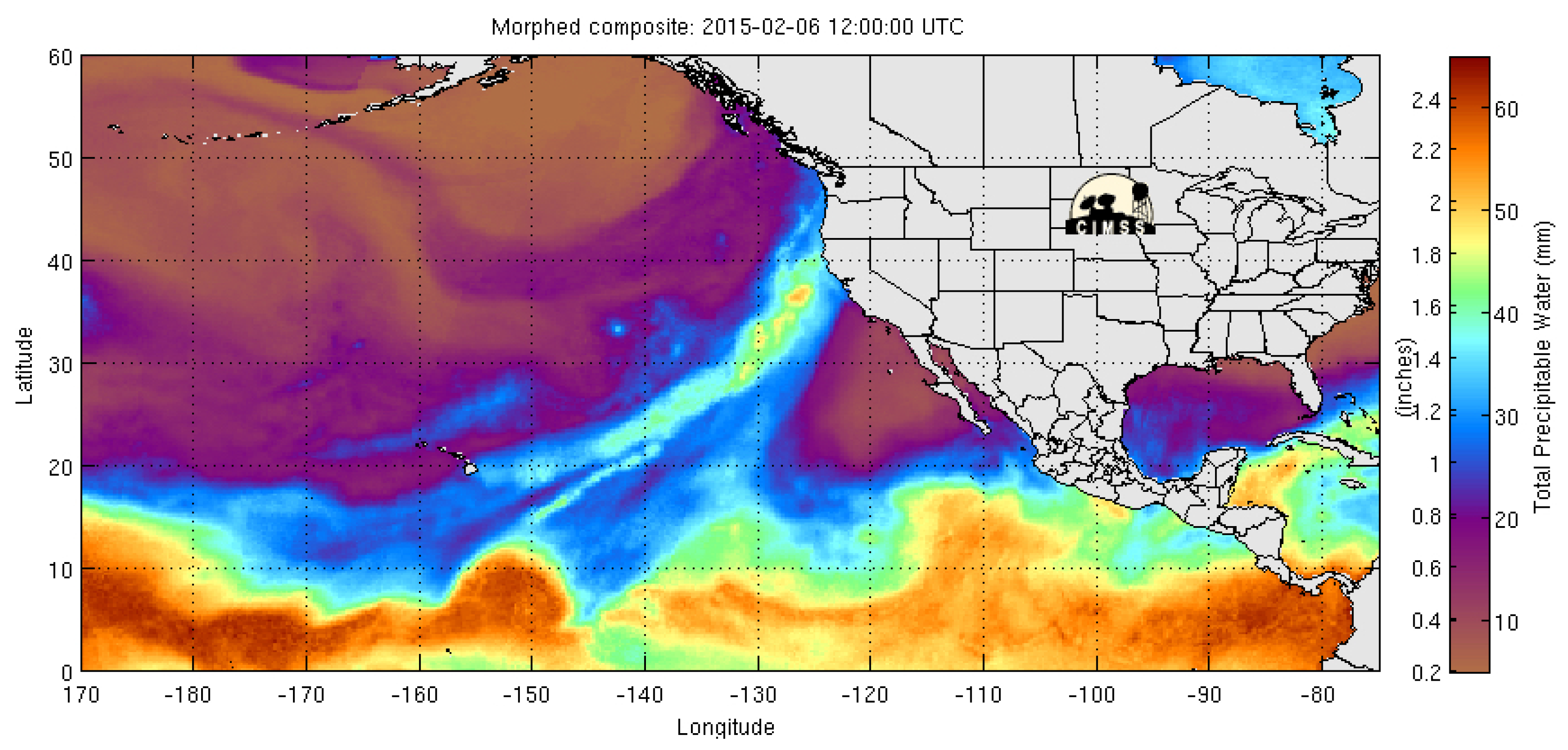
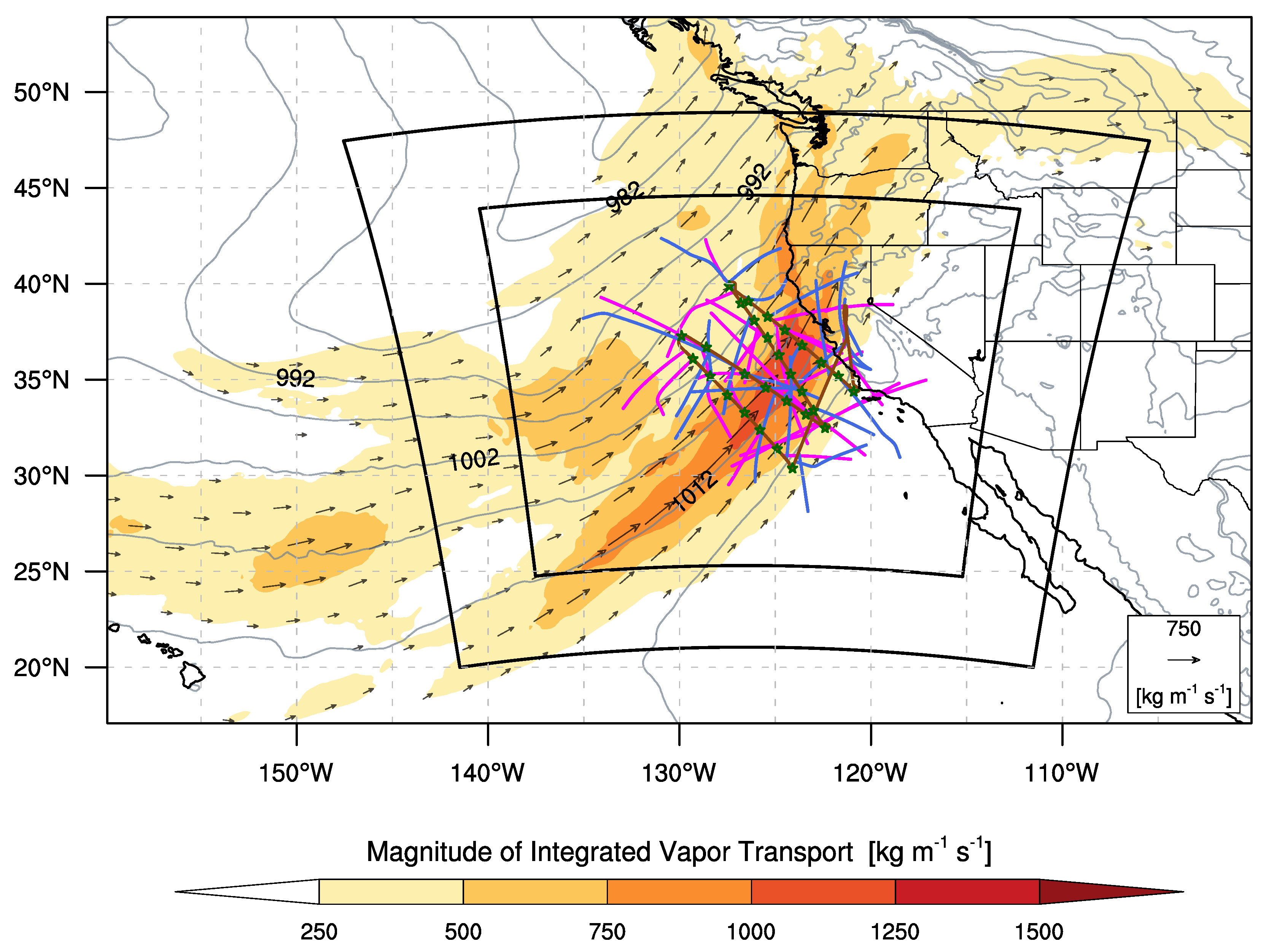
2. Atmospheric River Case Study
3. Materials and Methods
3.1. Numerical Modeling Experiments
3.2. Analysis of Numerical Experiments
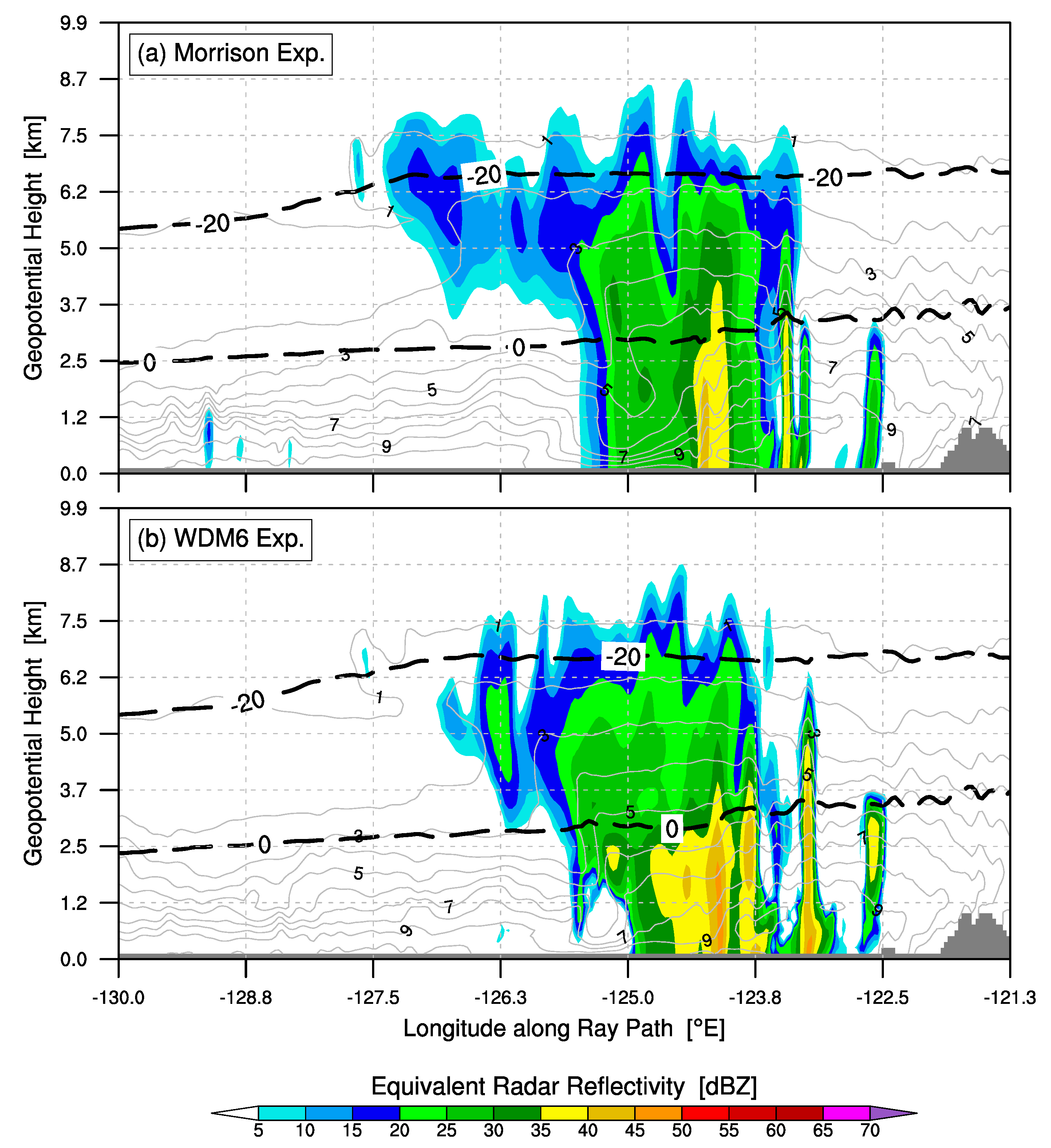
3.2.1. Equivalent Radar Reflectivity
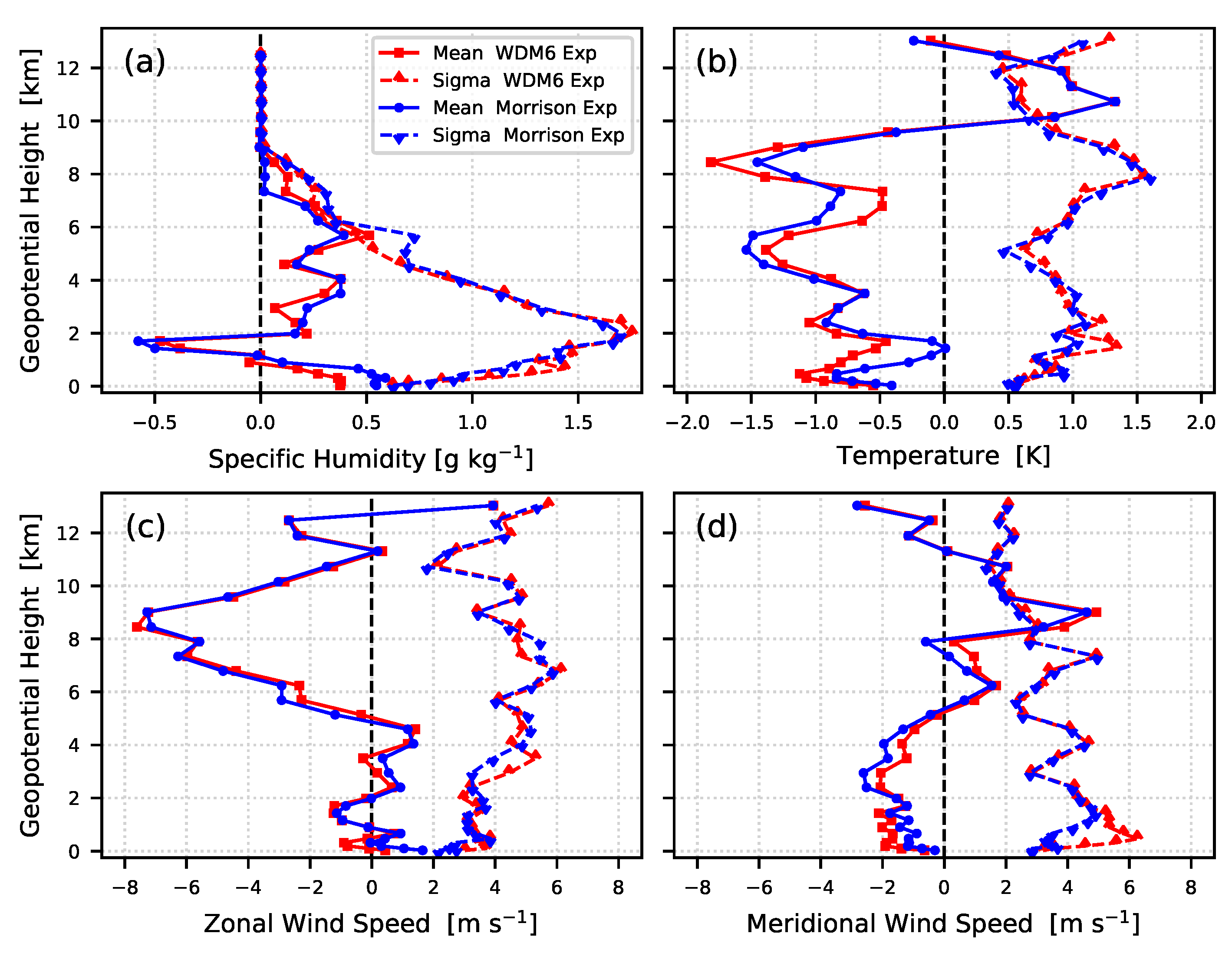
3.2.2. Comparison with Dropsonde Observations
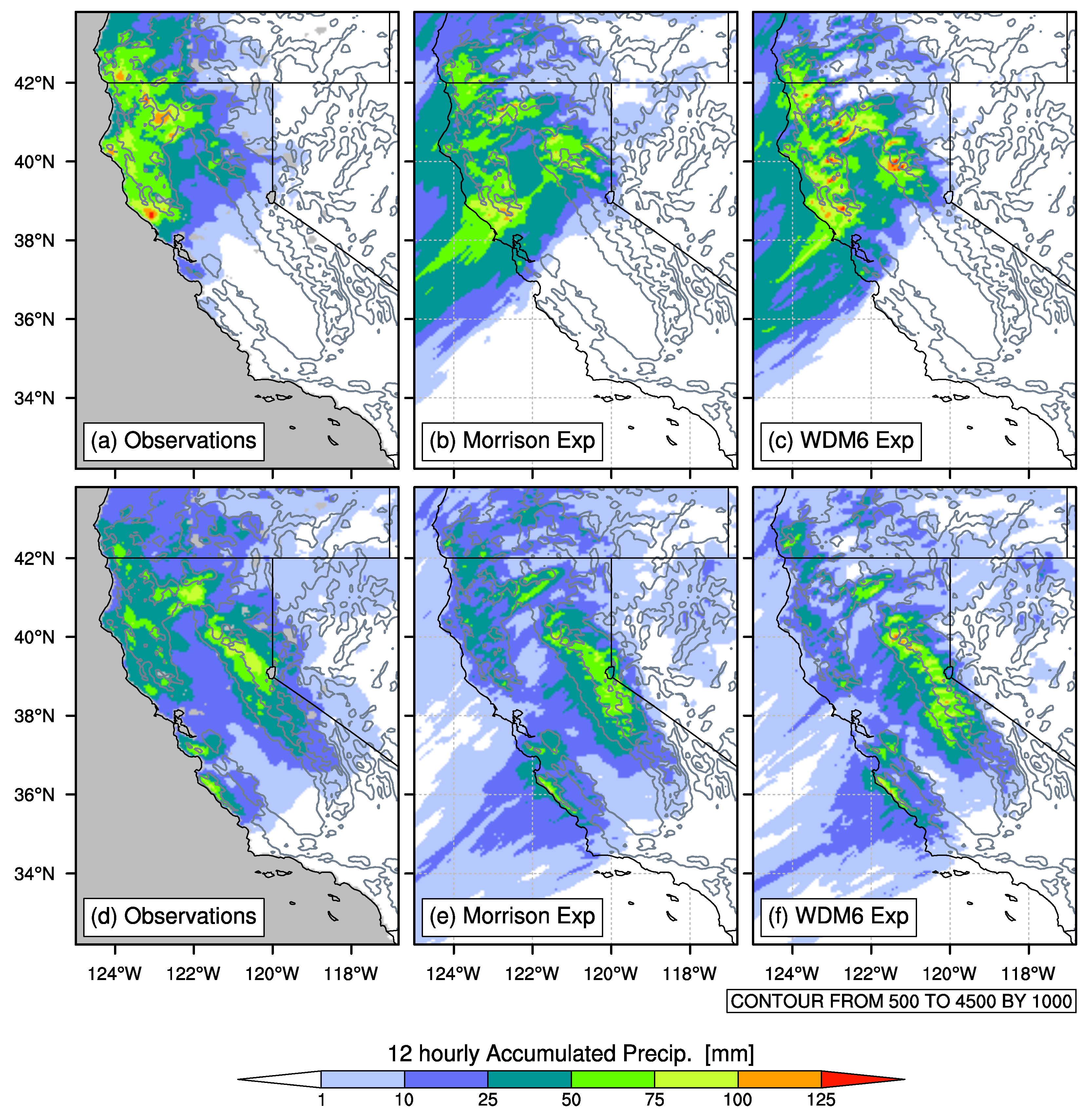
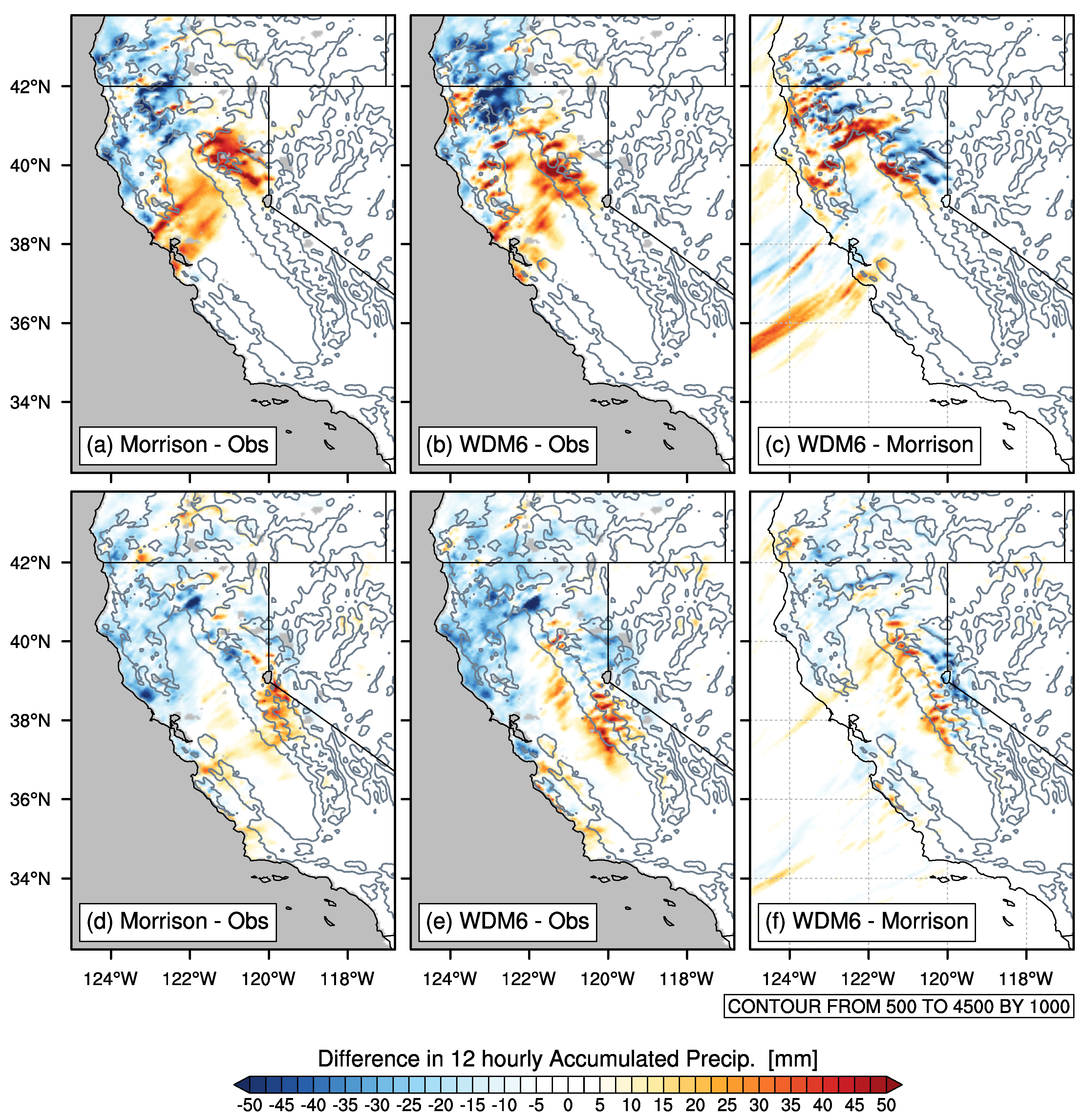
3.2.3. Accumulated Precipitation
3.3. Polarimetric Simulation Method
3.3.1. Refractivity Effects of Vapor, Liquid Water, and Ice
3.3.2. Simulation of Polarimetric Effects
3.3.3. Raytracing Simulation of Polarimetric Delay
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bae, S.Y.; Hong, S.Y.; Tao, W.K. Development of a Single-Moment Cloud Microphysics Scheme with Prognostic Hail for the Weather Research and Forecasting (WRF) Model. Asia-Pac. J. Atmos. Sci. 2019, 55, 233–245. [Google Scholar] [CrossRef]
- Morrison, H.; Thompson, G.; Tatarskii, V. Impact of Cloud Microphysics on the Development of Trailing Stratiform Precipitation in a Simulated Squall Line: Comparison of One- and Two-Moment Schemes. Mon. Weather Rev. 2009, 137, 991–1007. [Google Scholar] [CrossRef]
- Lim, K.; Hong, S. Development of an Effective Double-Moment Cloud Microphysics Scheme with Prognostic Cloud Condensation Nuclei (CCN) for Weather and Climate Models. Mon. Weather Rev. 2010, 138, 1587–1612. [Google Scholar] [CrossRef]
- Igel, A.L.; Igel, M.R.; van den Heever, S.C. Make It a Double? Sobering Results from Simulations Using Single-Moment Microphysics Schemes. J. Atmos. Sci. 2014, 72, 910–925. [Google Scholar] [CrossRef]
- Willis, P.T. Functional Fits to Some Observed Drop Size Distributions and Parameterization of Rain. J. Atmos. Sci. 1984, 41, 1648–1661. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y.; Zhang, L.; Hao, X.; Lei, H.; Zheng, H. Validation of GPM Precipitation Products by Comparison with Ground-Based Parsivel Disdrometers over Jianghuai Region. Water 2019, 11, 1260. [Google Scholar] [CrossRef]
- Kumjian, M.R.; Martinkus, C.P.; Prat, O.P.; Collis, S.; Van Lier-Walqui, M.; Morrison, H.C. A moment-based polarimetric radar forward operator for rain microphysics. J. Appl. Meteorol. Climatol. 2019, 58, 113–130. [Google Scholar] [CrossRef]
- Villarini, G.; Krajewski, W.F. Review of the Different Sources of Uncertainty in Single Polarization Radar-Based Estimates of Rainfall. Surv. Geophys. 2010, 31, 107–129. [Google Scholar] [CrossRef]
- Lang, T.J.; Rutledge, S.A.; Cifelli, R. Polarimetric Radar Observations of Convection in Northwestern Mexico during the North American Monsoon Experiment. J. Hydrometeorol. 2010, 11, 1345–1357. [Google Scholar] [CrossRef][Green Version]
- Bringi, V.N.; Williams, C.R.; Thurai, M.; May, P.T. Using Dual-Polarized Radar and Dual-Frequency Profiler for DSD Characterization: A Case Study from Darwin, Australia. J. Atmos. Ocean. Technol. 2009, 26, 2107–2122. [Google Scholar] [CrossRef]
- Kain, J.S.; Xue, M.; Coniglio, M.C.; Weiss, S.J.; Kong, F.; Jensen, T.L.; Brown, B.G.; Gao, J.; Brewster, K.; Thomas, K.W.; et al. Assessing Advances in the Assimilation of Radar Data and Other Mesoscale Observations within a Collaborative Forecasting–Research Environment. Weather Forecast. 2010, 25, 1510–1521. [Google Scholar] [CrossRef]
- Jankov, I.; Bao, J.W.; Neiman, P.J.; Schultz, P.J.; Yuan, H.; White, A.B. Evaluation and Comparison of Microphysical Algorithms in ARW-WRF Model Simulations of Atmospheric River Events Affecting the California Coast. J. Hydrometeorol. 2009, 10, 847–870. [Google Scholar] [CrossRef]
- Starzec, M.; Mullendore, G.L.; Kucera, P.A. Using radar reflectivity to evaluate the vertical structure of forecast convection. J. Appl. Meteorol. Climatol. 2018, 57, 2835–2849. [Google Scholar] [CrossRef]
- Brown, B.R.; Bell, M.M.; Frambach, A.J. Validation of simulated hurricane drop size distributions using polarimetric radar. Geophys. Res. Lett. 2016, 43, 910–917. [Google Scholar] [CrossRef]
- Cardellach, E.; Tomás, S.; Oliveras, S.; Padullés, R.; Rius, A.; De La Torre-Juárez, M.; Turk, F.J.; Ao, C.O.; Kursinski, E.R.; Schreiner, B.; et al. Sensitivity of PAZ LEO polarimetric GNSS radio-occultation experiment to precipitation events. IEEE Trans. Geosci. Remote Sens. 2015, 53, 190–206. [Google Scholar] [CrossRef]
- Kursinski, E.; Hajj, G.; Bertiger, W.; Leroy, S.; Meehan, T.; Romans, L.; Schofield, J.; McCleese, D.; Melbourne, W.; Thornton, C.; et al. Initial results of radio occultation observations of Earth’s atmosphere using the Global Positioning System. Science 1996, 271, 1107–1110. [Google Scholar] [CrossRef]
- Kursinski, E.R.; Hajj, G.A.; Schofield, J.T.; Linfield, R.P.; Hardy, K.R. Observing Earth’s atmosphere with radio occultation measurements using the Global Positioning System. J. Geophys. Res. Atmos. 1997, 102, 23429–23465. [Google Scholar] [CrossRef]
- Hajj, G.A.; Kursinski, E.R.; Romans, L.J.; Bertiger, W.I.; Leroy, S.S. A Technical Description of Atmospheric Sounding by GPS. System 2002, 64, 451–469. [Google Scholar] [CrossRef]
- Vorob’ev, V. Estimation of the accuracy of the atmospheric refractive index recovery from Doppler shift measurements at frequencies used in the NAVSTAR system. Atmos. Ocean. Phys. 1994, 29, 602–609. [Google Scholar]
- Solheim, F.S.; Vivekanandan, J.; Ware, R.H.; Rocken, C. Propagation delays induced in GPS signals by dry air, water vapor, hydrometeors, and other particulates. J. Geophys. Res. Atmos. 1999, 104, 9663–9670. [Google Scholar] [CrossRef]
- Ho, S.P.; Anthes, R.A.; Ao, C.O.; Healy, S.; Horanyi, A.; Hunt, D.; Mannucci, A.J.; Pedatella, N.; Randel, W.J.; Simmons, A.; et al. The COSMIC/FORMOSAT-3 Radio Occultation Mission after 12 years: Accomplishments, Remaining Challenges, and Potential Impacts of COSMIC-2. Bull. Am. Meteorol. Soc. 2019. [Google Scholar] [CrossRef]
- Ao, C.O.; Waliser, D.E.; Chan, S.K.; Li, J.L.; Tian, B.; Xie, F.; Mannucci, A.J. Planetary boundary layer heights from GPS radio occultation refractivity and humidity profiles. J. Geophys. Res. Atmos. 2012, 117, 1–18. [Google Scholar] [CrossRef]
- Wang, L.; Alexander, M. Global estimates of gravity wave parameters from GPS radio occultation temperature data. J. Geophys. Res. Atmos. 2010, 115. [Google Scholar] [CrossRef]
- Healy, S.B. Forecast impact experiment with GPS radio occultation measurements. Geophys. Res. Lett. 2005, 32, L03804. [Google Scholar] [CrossRef]
- Cucurull, L.; Derber, J.C. Operational Implementation of COSMIC Observations into NCEP’s Global Data Assimilation System. Weather Forecast. 2008, 23, 702–711. [Google Scholar] [CrossRef]
- Cardellach, E.; Padullés, R.; Tomás, S.; Turk, F.J.; Ao, C.O.; de la Torre-Juárez, M. Probability of intense precipitation from polarimetric GNSS radio occultation observations. Q. J. R. Meteorol. Soc. 2018, 144, 206–220. [Google Scholar] [CrossRef]
- Padullés, R.; Cardellach, E.; De La Torre Juárez, M.; Tomás, S.; Turk, F.J.; Oliveras, S.; Ao, C.O.; Rius, A. Atmospheric polarimetric effects on GNSS radio occultations: The ROHP-PAZ field campaign. Atmos. Chem. Phys. 2016, 16, 635–649. [Google Scholar] [CrossRef]
- Cardellach, E.; Oliveras, S.; Rius, A.; Tomás, S.; Ao, C.O.; Franklin, G.W.; Iijima, B.A.; Kuang, D.; Meehan, T.K.; Padullés, R.; et al. Sensing Heavy Precipitation With GNSS Polarimetric Radio Occultations. Geophys. Res. Lett. 2019, 46, 1024–1031. [Google Scholar] [CrossRef]
- Haase, J.S.; Murphy, B.J.; Muradyan, P.; Nievinski, F.G.; Larson, K.M.; Garrison, J.L.; Wang, K.N. First results from an airborne GPS radio occultation system for atmospheric profiling. Geophys. Res. Lett. 2014, 41, 1759–1765. [Google Scholar] [CrossRef]
- Murphy, B.J.; Haase, J.S.; Muradyan, P.; Garrison, J.L.; Wang, K.N. Airborne GPS radio occultation refractivity profiles observed in tropical storm environments. J. Geophys. Res. Atmos. 2015, 120, 1690–1709. [Google Scholar] [CrossRef]
- Xie, F.; Adhikari, L.; Haase, J.S.; Murphy, B.; Wang, K.N.; Garrison, J.L. Sensitivity of airborne radio occultation to tropospheric properties over ocean and land. Atmos. Meas. Tech. 2018, 11, 763–780. [Google Scholar] [CrossRef]
- Chen, X.M.; Chen, S.H.; Haase, J.S.; Murphy, B.J.; Wang, K.N.; Garrison, J.L.; Chen, S.Y.; Huang, C.Y.; Adhikari, L.; Xie, F. The Impact of Airborne Radio Occultation Observations on the Simulation of Hurricane Karl (2010). Mon. Weather Rev. 2018, 146, 329–350. [Google Scholar] [CrossRef]
- Sokolovskiy, S.; Kuo, Y.H.; Wang, W. Evaluation of a linear phase observation operator with CHAMP radio occultation data and high-resolution regional analysis. Mon. Weather Rev. 2005, 133, 3053–3059. [Google Scholar] [CrossRef]
- Chen, S.Y.; Huang, C.Y.; Kuo, Y.H.; Guo, Y.R.; Sokolovskiy, S.; Stract, A.B. Assimilation of GPS Refractivity from FORMOSAT-3 / COSMIC Using a Nonlocal Operator with WRF 3DVAR and Its Impact on the Prediction of a Typhoon Event. Terr. Atmos. Ocean. Sci. 2009, 20, 133–154. [Google Scholar] [CrossRef]
- Ralph, F.M.; Neiman, P.J.; Wick, G.A. Satellite and CALJET aircraft observations of atmospheric rivers over the eastern North Pacific Ocean during the winter of 1997/98. Mon. Weather Rev. 2004, 132, 1721–1745. [Google Scholar] [CrossRef]
- Neiman, P.J.; Ralph, F.M.; Wick, G.A.; Lundquist, J.D.; Dettinger, M.D. Meteorological characteristics and overland precipitation impacts of atmospheric rivers affecting the West Coast of North America based on eight years of SSM/I satellite observations. J. Hydrometeorol. 2008, 9, 22–47. [Google Scholar] [CrossRef]
- Zhu, Y.; Newell, R.E. A Proposed Algorithm for Moisture Fluxes from Atmospheric Rivers. Mon. Weather Rev. 1998, 126, 725–735. [Google Scholar] [CrossRef]
- Guan, B.; Waliser, D.E. Detection of atmospheric rivers: Evaluation and application of an algorithm for global studies. J. Geophys. Res. Atmos. 2015, 120, 12514–12535. [Google Scholar] [CrossRef]
- Lavers, D.A.; Allan, R.P.; Wood, E.F.; Villarini, G.; Brayshaw, D.J.; Wade, A.J. Winter floods in Britain are connected to atmospheric rivers. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Viale, M.; Nuñez, M.N. Climatology of winter orographic precipitation over the subtropical central Andes and associated synoptic and regional characteristics. J. Hydrometeorol. 2018, 12, 481–507. [Google Scholar] [CrossRef]
- Ralph, F.M.; Rutz, J.J.; Cordeira, J.M.; Dettinger, M.; Anderson, M.; Reynolds, D.; Schick, L.J.; Smallcomb, C. A scale to characterize the strength and impacts of atmospheric rivers. Bull. Am. Meteorol. Soc. 2019, 100, 269–289. [Google Scholar] [CrossRef]
- Ralph, F.M.; Neiman, P.J.; Wick, G.A.; Gutman, S.I.; Dettinger, M.D.; Cayan, D.R.; White, A.B. Flooding on California’s Russian River: Role of atmospheric rivers. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- White, A.B.; Moore, B.J.; Gottas, D.J.; Neiman, P.J. Winter storm conditions leading to excessive runoff above California’s Oroville Dam during January and February 2017. Bull. Am. Meteorol. Soc. 2019, 100, 55–70. [Google Scholar] [CrossRef]
- Ralph, F.M.; Neiman, P.J.; Kingsmill, D.E.; Persson, P.O.G.; White, A.B.; Strem, E.T.; Andrews, E.D.; Antweiler, R.C. The impact of a prominent rain shadow on flooding in California’s Santa Cruz Mountains: A CALJET case study and sensitivity to the ENSO cycle. J. Hydrometeorol. 2003, 4, 1243–1264. [Google Scholar] [CrossRef]
- Dettinger, M.D.; Ralph, F.M.; Hughes, M.; Das, T.; Neiman, P.; Cox, D.; Estes, G.; Reynolds, D.; Hartman, R.; Cayan, D.; et al. Design and quantification of an extreme winter storm scenario for emergency preparedness and planning exercises in California. Nat. Hazards 2012, 60, 1085–1111. [Google Scholar] [CrossRef]
- Dettinger, M.D.; Ralph, F.M.; Das, T.; Neiman, P.J.; Cayan, D.R. Atmospheric Rivers, Floods and the Water Resources of California. Water 2011, 3, 445–478. [Google Scholar] [CrossRef]
- Guan, B.; Molotch, N.P.; Waliser, D.E.; Fetzer, E.J.; Neiman, P.J. Extreme snowfall events linked to atmospheric rivers and surface air temperature via satellite measurements. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Rutz, J.J.; Steenburgh, W.J.; Ralph, F.M. Climatological characteristics of atmospheric rivers and their inland penetration over the western United States. Mon. Weather Rev. 2014, 142, 905–921. [Google Scholar] [CrossRef]
- Martner, B.E.; Yuter, S.E.; White, A.B.; Matrosov, S.Y.; Kingsmill, D.E.; Ralph, F.M. Raindrop size distributions and rain characteristics in California coastal rainfall for periods with and without a radar bright band. J. Hydrometeorol. 2008, 9, 408–425. [Google Scholar] [CrossRef]
- Behringer, D.; Chiao, S. Numerical Investigations of Atmospheric Rivers and the Rain Shadow over the Santa Clara Valley. Atmosphere 2019, 10, 114. [Google Scholar] [CrossRef]
- Skamarock, W.C.; Klemp, J.B.; Dudhia, J.; Gill, D.O.; Barker, D.M.; Wang, W.; Powers, J.G. A Description of the Advanced Research WRF Version 3. NCAR Technical Note-475+ STR; Technical Report; National Center For Atmospheric Research: Boulder, CO, USA, 2008. [Google Scholar]
- Martin, A.; Ralph, F.M.; Demirdjian, R.; DeHaan, L.; Weihs, R.; Helly, J.; Reynolds, D.; Iacobellis, S. Evaluation of Atmospheric River Predictions by the WRF Model Using Aircraft and Regional Mesonet Observations of Orographic Precipitation and Its Forcing. J. Hydrometeorol. 2018, 19, 1097–1113. [Google Scholar] [CrossRef]
- Ralph, F.M.; Prather, K.A.; Cayan, D.; Spackman, J.R.; Demott, P.; Dettinger, M.; Fairall, C.; Leung, R.; Rosenfeld, D.; Rutledge, S.; et al. Calwater field studies designed to quantify the roles of atmospheric rivers and aerosols in modulating U.S. West Coast Precipitation in a changing climate. Bull. Am. Meteorol. Soc. 2016, 97, 1209–1228. [Google Scholar] [CrossRef]
- Lin, Y.; Mitchell, K.E. The NCEP Stage II/IV hourly precipitation analyses: Development and applications. In Proceedings of the 19th American Meteorological Society Conference on Hydrology, San Diego, CA, USA, 9–13 January 2005; Paper 1.2. pp. 2–5. [Google Scholar]
- Kain, J.S. The Kain–-Fritsch Convective Parameterization: An Update. J. Appl. Meteorol. 2004, 43, 170–181. [Google Scholar] [CrossRef]
- Livneh, B.; Xia, Y.; Mitchell, K.E.; Ek, M.B.; Lettenmaier, D.P. Noah LSM Snow Model Diagnostics and Enhancements. J. Hydrometeorol. 2010, 11, 721–738. [Google Scholar] [CrossRef]
- Hong, S.Y.; Noh, Y.; Dudhia, J. A New Vertical Diffusion Package with an Explicit Treatment of Entrainment Processes. Mon. Weather Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef]
- Jiménez, P.A.; Dudhia, J.; González-Rouco, J.F.; Navarro, J.; Montávez, J.P.; García-Bustamante, E. A Revised Scheme for the WRF Surface Layer Formulation. Mon. Weather Rev. 2012, 140, 898–918. [Google Scholar] [CrossRef]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmospheres: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. Atmos. 1997, 102, 16663–16682. [Google Scholar] [CrossRef]
- Iacono, M.J.; Delamere, J.S.; Mlawer, E.J.; Shephard, M.W.; Clough, S.A.; Collins, W.D. Radiative forcing by long-lived greenhouse gases: Calculations with the AER radiative transfer models. J. Geophys. Res. 2008, 113, D13103. [Google Scholar] [CrossRef]
- Kumar, P.; Kishtawal, C.M.; Pal, P.K. Impact of ECMWF, NCEP, and NCMRWF global model analysis on the WRF model forecast over Indian Region. Theor. Appl. Climatol. 2015. [Google Scholar] [CrossRef]
- Ralph, F.M.; Neiman, P.J.; Rotunno, R. Dropsonde Observations in Low-Level Jets over the Northeastern Pacific Ocean from CALJET-1998 and PACJET-2001: Mean Vertical-Profile and Atmospheric-River Characteristics. Mon. Weather Rev. 2005, 133, 889–910. [Google Scholar] [CrossRef]
- Cardellach, E.; Rius, A.; Cerezo, F.; García-Primo, M.Á.; de la Torre-Juárez, M.; Cucurull, L.; Ector, D. Polarimetric GNSS Radio-Occultations for heavy rain detection. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3841–3844. [Google Scholar]
- Mishchenko, M.I.; Travis, L.D. Capabilities and limitations of a current FORTRAN implementation of the T-matrix method for randomly oriented, rotationally symmetric scatterers. J. Quant. Spectrosc. Radiat. Transf. 1998, 60, 309–324. [Google Scholar] [CrossRef]
- Beard, K.V.; Chuang, C. A new model for the equilibrium shape of raindrops. J. Atmos. Sci. 1987, 44, 1509–1524. [Google Scholar] [CrossRef]
- Padullés, R.; Cardellach, E.; Wang, K.N.; Ao, C.O.; Turk, F.J.; de la Torre-Juárez, M. Assessment of GNSS radio occultation refractivity under heavy precipitation. Atmos. Chem. Phys. 2018, 1–17. [Google Scholar] [CrossRef]
- Montenbruck, O.; Rizos, C.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. Getting a grip on multi-GNSS. GPS World 2013, 24, 44–49. [Google Scholar]
- Xie, F.; Haase, J.S.; Syndergaard, S. Profiling the Atmosphere Using the Airborne GPS Radio Occultation Technique: A Sensitivity Study. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3424–3435. [Google Scholar] [CrossRef]
- Marshall, J.S.; Palmer, W.M.K. The distribution of raindrops with size. J. Meteorol. 1948, 5, 165–166. [Google Scholar] [CrossRef]
- Liebe, H.J.; Hufford, G.A.; Manabe, T. A model for the complex permittivity of water at frequencies below 1 THz. Int. J. Infrared Millim. Waves 1991, 12, 659–675. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar; Principles and Applications; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Ryzhkov, A.V.; Zrnić, D.S.; Gordon, B.A. Polarimetric method for ice water content determination. J. Appl. Meteorol. 1998, 37, 125–134. [Google Scholar] [CrossRef]
- Brown, P.R.; Heymsfield, A.J. The microphysical properties of tropical convective anvil cirrus: A comparison of models and observations. Q. J. R. Meteorol. Soc. 2001, 127, 1535–1550. [Google Scholar] [CrossRef]
- Lu, Y.; Aydin, K.; Clothiaux, E.E.; Verlinde, J. Retrieving cloud ice water content using millimeter- and centimeter-wavelength radar polarimetric observables. J. Appl. Meteorol. Climatol. 2015, 54, 596–604. [Google Scholar] [CrossRef]
- Fan, J.; Liu, Y.C.; Xu, K.M.; North, K.; Collis, S.; Dong, X.; Zhang, G.J.; Chen, Q.; Kollias, P.; Ghan, S.J. Improving representation of convective transport for scale-aware parameterization: 1. Convection and cloud properties simulated with spectral bin and bulk microphysics. J. Geophys. Res. Atmos. 2015, 120, 3485–3509. [Google Scholar] [CrossRef]
- Fan, J.; Wang, Y.; Rosenfeld, D.; Liu, X. Review of aerosol–cloud interactions: Mechanisms, significance, and challenges. J. Atmos. Sci. 2016, 73, 4221–4252. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Lowe, S.; Zuffada, C.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP mission: First assessment of polarimetric scatterometry over land and cryosphere. Remote. Sens. 2017, 9, 362. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Domain 1 | Domain 2 |
|---|---|---|
| Horizontal resolution (km) | 9 | 3 |
| Mesh size (grid points) | 360 × 350 | 736 × 721 |
| Vertical layers (total #) | 45 | 45 |
| Time step (s) | 45 | 15 |
| Cumulus parameterization | Kain-Fritsch | None |
| Longwave radiation | RRTMG | RRTMG |
| Shortwave radiation | RRTMG | RRTMG |
| Land surface model | NOAH | NOAH |
| Planetary boundary layer | YSU | YSU |
| Surface layer | MM5 similarity | MM5 similarity |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murphy, M.J.; Haase, J.S.; Padullés, R.; Chen, S.-H.; Morris, M.A. The Potential for Discriminating Microphysical Processes in Numerical Weather Forecasts Using Airborne Polarimetric Radio Occultations. Remote Sens. 2019, 11, 2268. https://doi.org/10.3390/rs11192268
Murphy MJ, Haase JS, Padullés R, Chen S-H, Morris MA. The Potential for Discriminating Microphysical Processes in Numerical Weather Forecasts Using Airborne Polarimetric Radio Occultations. Remote Sensing. 2019; 11(19):2268. https://doi.org/10.3390/rs11192268
Chicago/Turabian StyleMurphy, Michael J., Jennifer S. Haase, Ramon Padullés, Shu-Hua Chen, and Margaret A. Morris. 2019. "The Potential for Discriminating Microphysical Processes in Numerical Weather Forecasts Using Airborne Polarimetric Radio Occultations" Remote Sensing 11, no. 19: 2268. https://doi.org/10.3390/rs11192268
APA StyleMurphy, M. J., Haase, J. S., Padullés, R., Chen, S.-H., & Morris, M. A. (2019). The Potential for Discriminating Microphysical Processes in Numerical Weather Forecasts Using Airborne Polarimetric Radio Occultations. Remote Sensing, 11(19), 2268. https://doi.org/10.3390/rs11192268