Author Contributions
Conceptualization, J.L.C., D.L.W.; methodology, J.L.C., D.L.W., R.E.W., G.L., B.T.; software, J.L.C., H.M., B.T.; validation, B.T., H.M., J.L.C.; formal analysis, J.L.C., D.L.W.; investigation, J.L.C., D.L.W.; resources, D.L.W., R.E.W.; data curation, J.L.C., H.M.; writing—original draft preparation, J.L.C., D.L.W., H.M., G.L., B.T., R.E.W.; writing—J.L.C., D.L.W., H.M., G.L., B.T., R.E.W.; visualization, J.L.C., D.L.W., H.M.; supervision, D.L.W., R.E.W.; project administration, D.L.W., R.E.W.; funding acquisition, D.L.W., R.E.W.
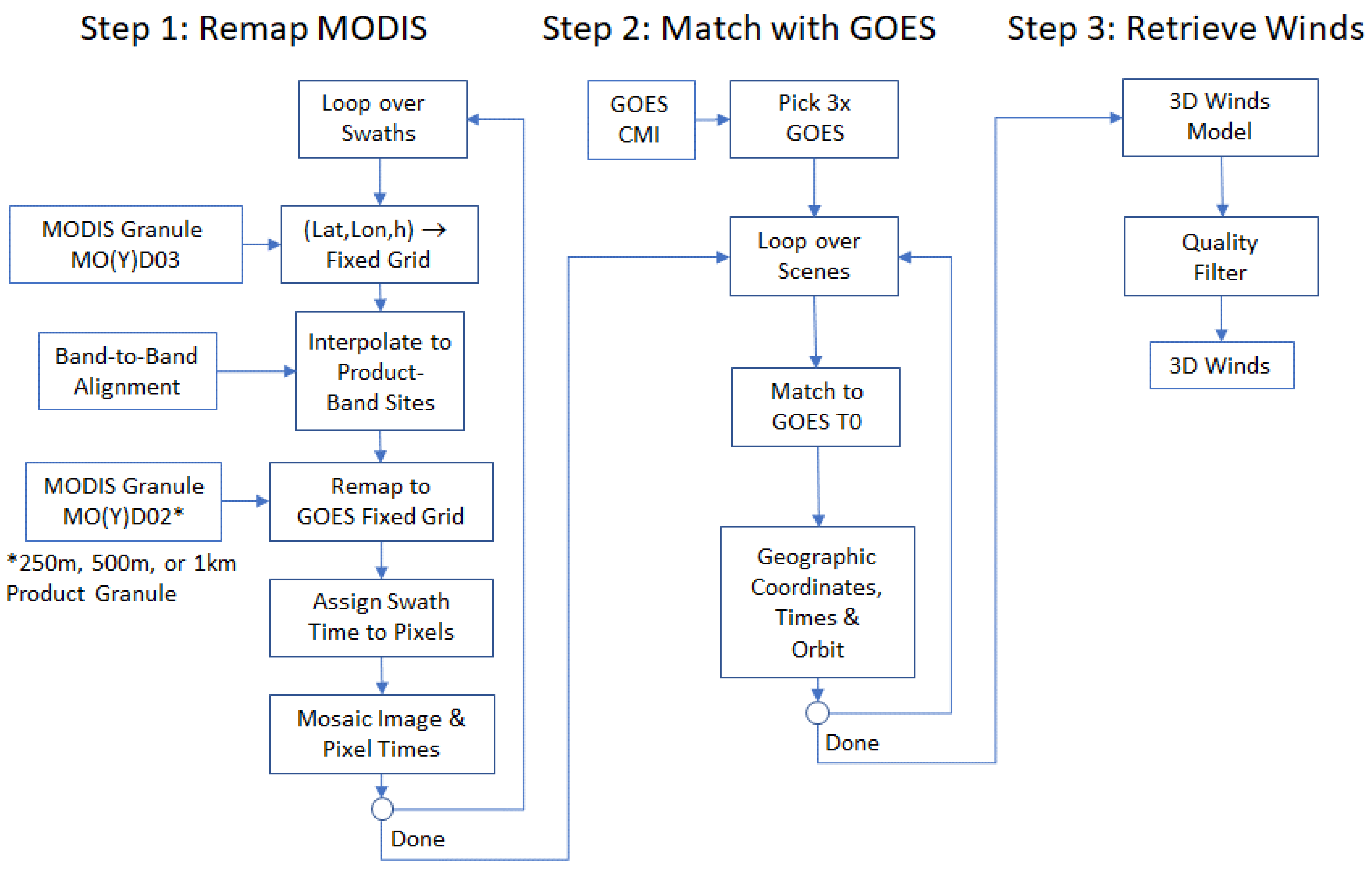
Figure 1.
Creation of a 3D-winds dataset is a three-step process. Step 1 remaps a moderate resolution imaging spectroradiometer (MODIS) L1b granule into the fixed-grid projection of the advanced baseline imager (ABI). Step 2 matches features common to a triplet of GOES cloud and moisture imagery (CMI) or radiances and the remapped MODIS granule to measure disparities between apparent geographical positions, which are affected by both atmospheric motion and parallax. Step 3 interprets the observed disparities as atmospheric motion vectors (AMVs) with vertical height assignments.
Figure 1.
Creation of a 3D-winds dataset is a three-step process. Step 1 remaps a moderate resolution imaging spectroradiometer (MODIS) L1b granule into the fixed-grid projection of the advanced baseline imager (ABI). Step 2 matches features common to a triplet of GOES cloud and moisture imagery (CMI) or radiances and the remapped MODIS granule to measure disparities between apparent geographical positions, which are affected by both atmospheric motion and parallax. Step 3 interprets the observed disparities as atmospheric motion vectors (AMVs) with vertical height assignments.
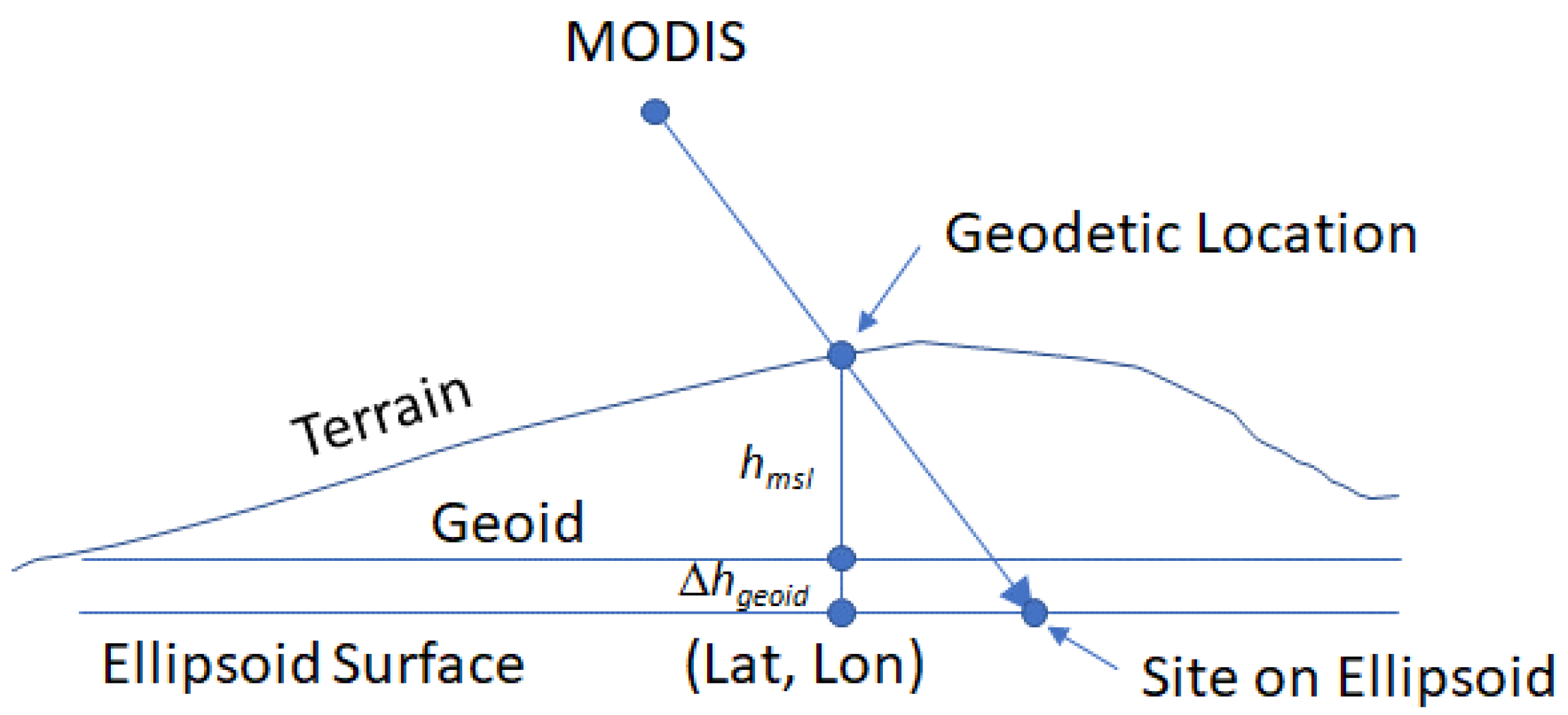
Figure 2.
MODIS pixel geographic coordinates represent the geodetic location where the line-of-sight pierces the terrain surface. We recalculate the geographic coordinates to represent where the line-of-sight pierces the WGS-84 ellipsoid considering the terrain height above the geoid (i.e., mean sea level) and the height of the geoid above the ellipsoid (gravity model).
Figure 2.
MODIS pixel geographic coordinates represent the geodetic location where the line-of-sight pierces the terrain surface. We recalculate the geographic coordinates to represent where the line-of-sight pierces the WGS-84 ellipsoid considering the terrain height above the geoid (i.e., mean sea level) and the height of the geoid above the ellipsoid (gravity model).
Figure 3.
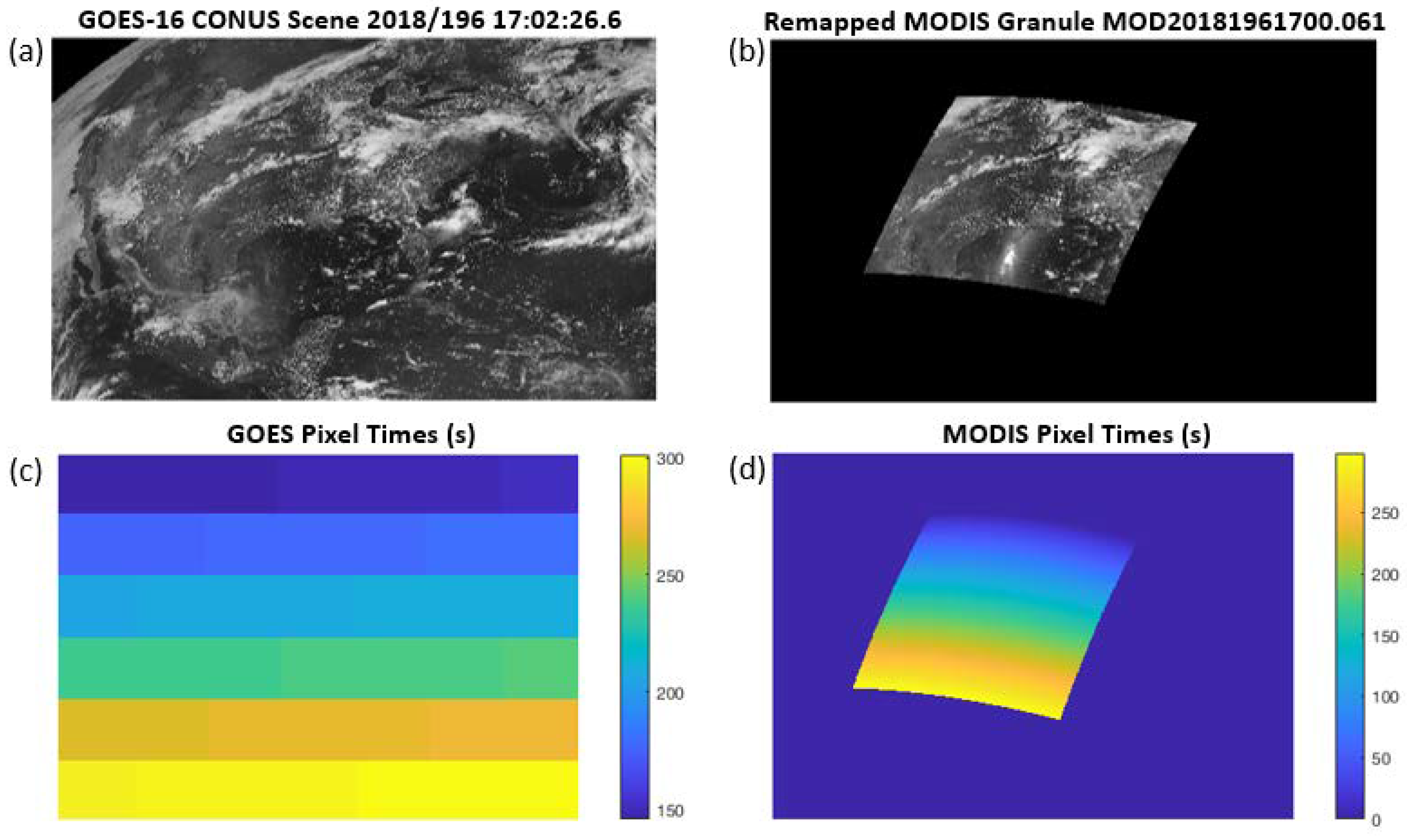
MODIS radiances are remapped along with their time tags to form fixed-grid mosaics in the same geometry as GOES ABI. An ABI scan model provides the time tags for the ABI pixels in each scene. At the upper left (a) is the B02 GOES-16 cloud and moisture imagery (CMI) for the CONUS scene and at the upper right (b) is the matching MODIS granule remapped to the ABI fixed grid. Their respective time models are shown on the bottom row (c,d). A common time epoch is used, which is the time of the first center-of-scan in the MODIS granule (about one second after the granule’s product time in this case). The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
Figure 3.
MODIS radiances are remapped along with their time tags to form fixed-grid mosaics in the same geometry as GOES ABI. An ABI scan model provides the time tags for the ABI pixels in each scene. At the upper left (a) is the B02 GOES-16 cloud and moisture imagery (CMI) for the CONUS scene and at the upper right (b) is the matching MODIS granule remapped to the ABI fixed grid. Their respective time models are shown on the bottom row (c,d). A common time epoch is used, which is the time of the first center-of-scan in the MODIS granule (about one second after the granule’s product time in this case). The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
Figure 4.
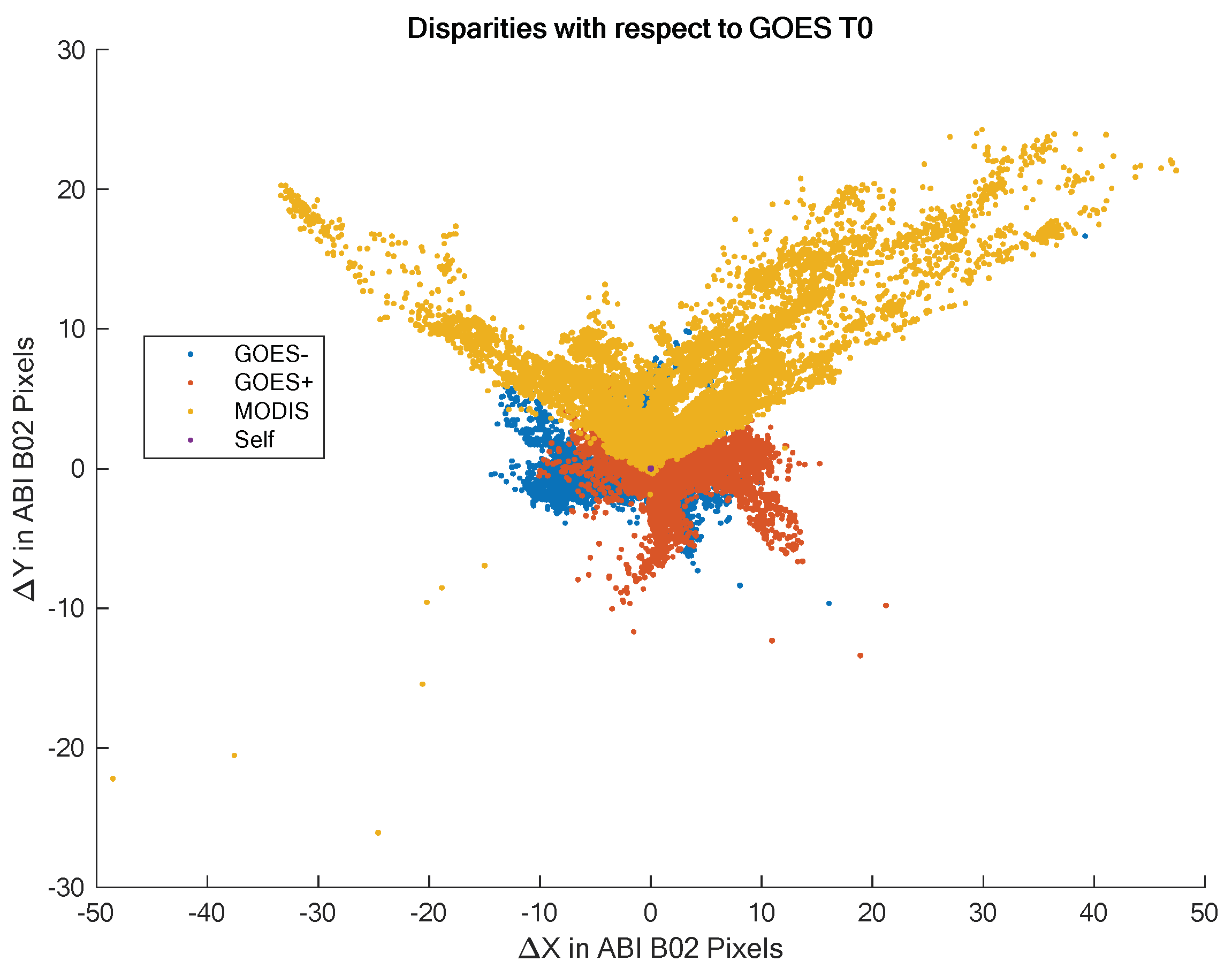
Disparities between matched features in GOES ABI scene T0 and the other images measure a combination of motion and parallax. Disparities are measured along the fixed grid axes (+X − east, +Y − north) in units of ABI B02 pixels. The legend identifies the match from GOES ABI T0 to T0 − Δt (“GOES−”), T0 + Δt (“GOES+”), MODIS, and to itself (“Self”). The characteristic wing pattern seen in the MODIS disparities with respect to the central image of the GOES triplet is due to the large MODIS scan angle at either end of its swath. The self matches (or autocorrelations) are tightly clustered at the origin. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
Figure 4.
Disparities between matched features in GOES ABI scene T0 and the other images measure a combination of motion and parallax. Disparities are measured along the fixed grid axes (+X − east, +Y − north) in units of ABI B02 pixels. The legend identifies the match from GOES ABI T0 to T0 − Δt (“GOES−”), T0 + Δt (“GOES+”), MODIS, and to itself (“Self”). The characteristic wing pattern seen in the MODIS disparities with respect to the central image of the GOES triplet is due to the large MODIS scan angle at either end of its swath. The self matches (or autocorrelations) are tightly clustered at the origin. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
Figure 5.
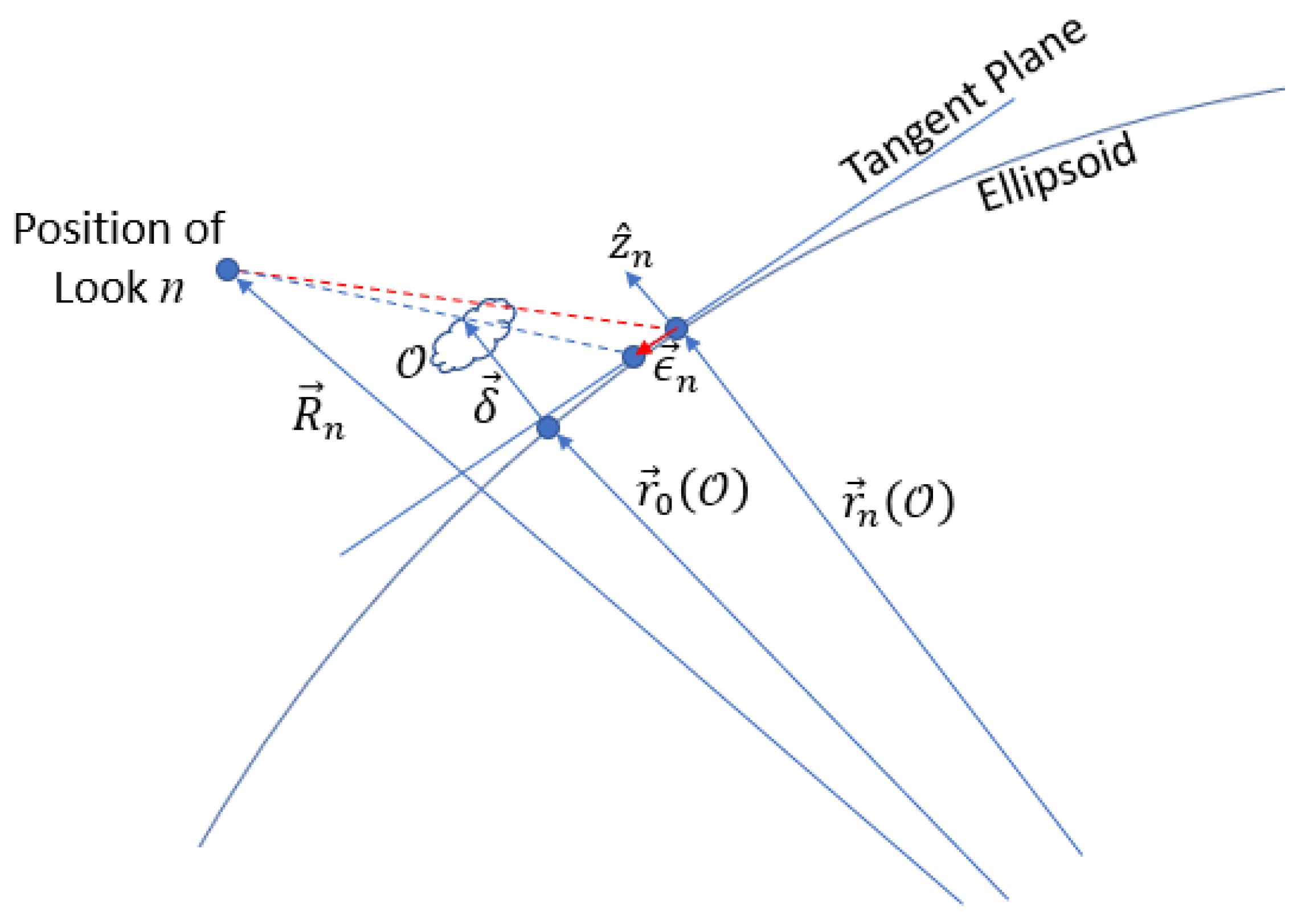
The MISR-GOES 3D-winds retrieval model is reused for MODIS and GOES. The n = 0 reference image provides a template for the feature with nominal location where it projects onto the ellipsoid as seen from camera look n = 0. The ellipsoid location of the matched feature in n ≠ 0 is determined from the measured disparity between n ≠ 0 and n = 0. The model minimizes the weighted sum of the squares across all looks of the calculated differences Each measures the difference in the tangent plane for n ≠ 0 between where the model places the feature and where it was actually found. The minimization uses five model states for each retrieval and the problem is solved by iterative refinement of the states until converged because the problem is slightly nonlinear. Three position states describe the displacement of the template from its nominal location on the ellipsoid at the assigned time tag for the template. The vertical component of is the height assignment. Two more states describe the motion of the template (wind) so that its instanteous displacement is , where is an AMV describing horizontal motion.
Figure 5.
The MISR-GOES 3D-winds retrieval model is reused for MODIS and GOES. The n = 0 reference image provides a template for the feature with nominal location where it projects onto the ellipsoid as seen from camera look n = 0. The ellipsoid location of the matched feature in n ≠ 0 is determined from the measured disparity between n ≠ 0 and n = 0. The model minimizes the weighted sum of the squares across all looks of the calculated differences Each measures the difference in the tangent plane for n ≠ 0 between where the model places the feature and where it was actually found. The minimization uses five model states for each retrieval and the problem is solved by iterative refinement of the states until converged because the problem is slightly nonlinear. Three position states describe the displacement of the template from its nominal location on the ellipsoid at the assigned time tag for the template. The vertical component of is the height assignment. Two more states describe the motion of the template (wind) so that its instanteous displacement is , where is an AMV describing horizontal motion.

Figure 6.
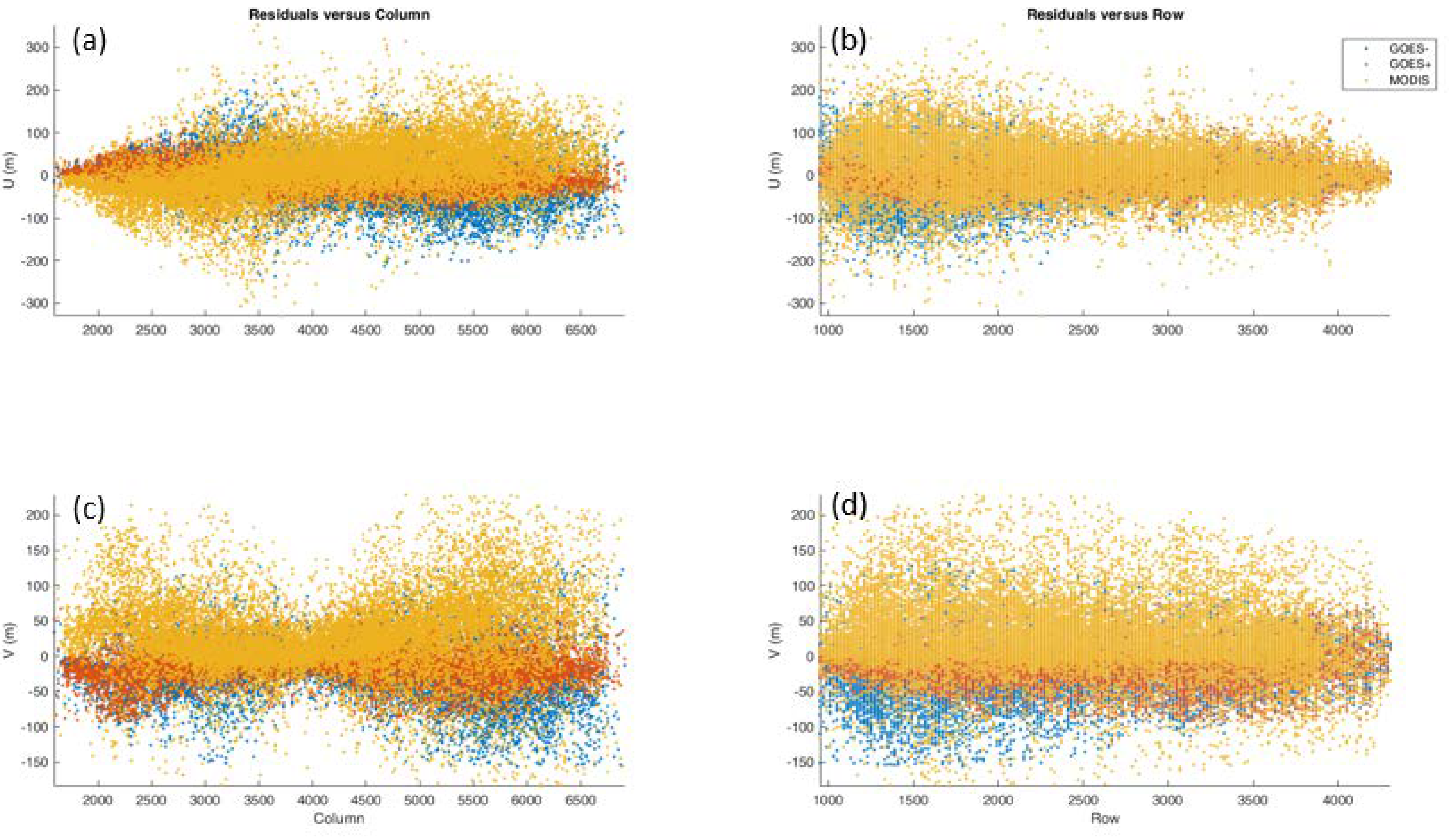
Residual disparities after applying the 3D-winds retrieval model in the tangent plane are plotted by image column in (a,c) or row in (b,d). The legend identifies the matches used in the retrievals: i.e., from GOES ABI T0 to T0 − Δt (“GOES−”), T0 + Δt (“GOES+”), and MODIS. Residuals are less than 0.5 ABI B02 pixel, which is 500 m at the subsatellite point. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
Figure 6.
Residual disparities after applying the 3D-winds retrieval model in the tangent plane are plotted by image column in (a,c) or row in (b,d). The legend identifies the matches used in the retrievals: i.e., from GOES ABI T0 to T0 − Δt (“GOES−”), T0 + Δt (“GOES+”), and MODIS. Residuals are less than 0.5 ABI B02 pixel, which is 500 m at the subsatellite point. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2.
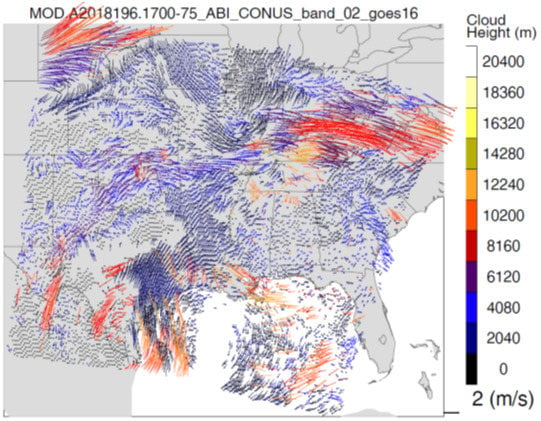
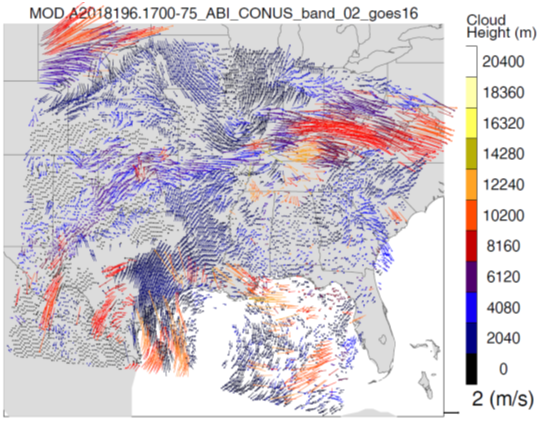
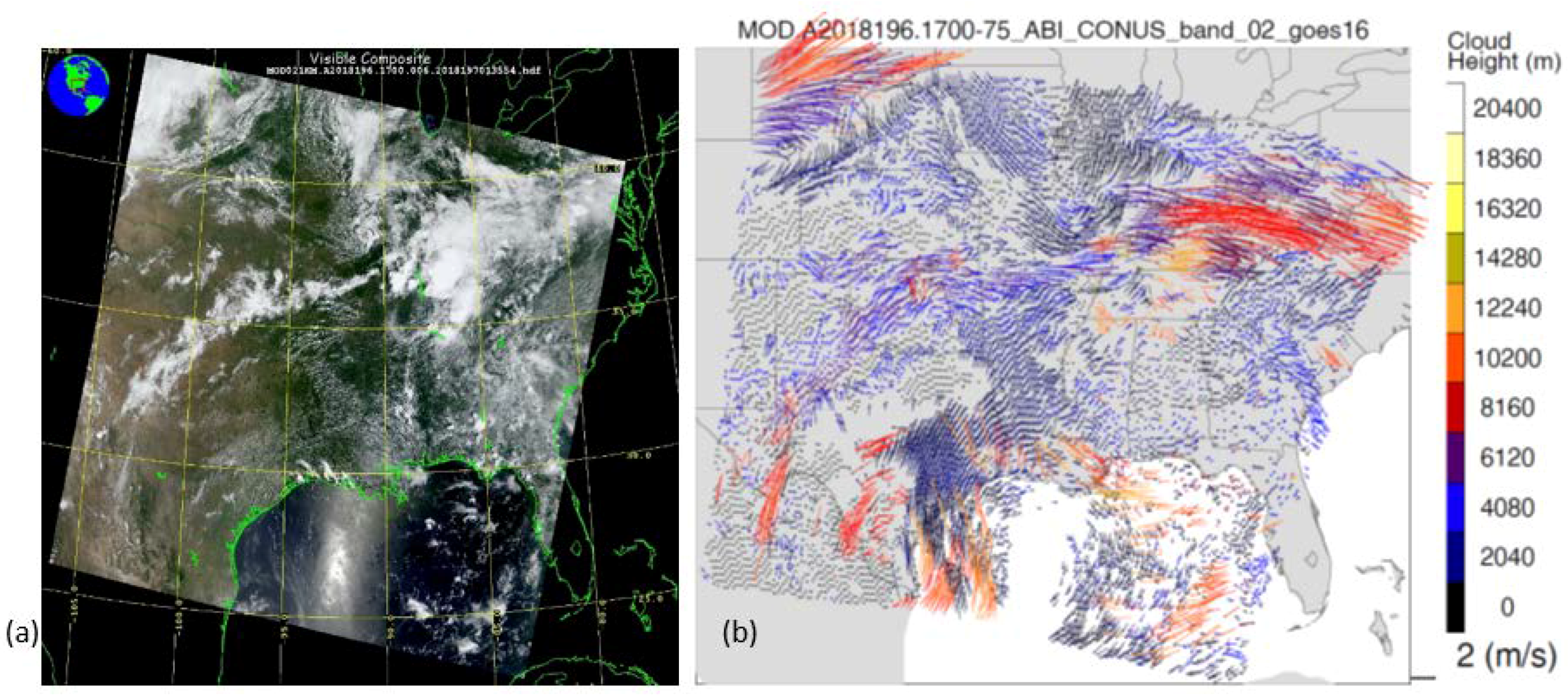
Figure 7.
Retrieved 3D-winds states describe the horizontal wind velocities and their pattern heights. Vector lengths in the righthand panel (b) are scaled in proportion to wind speed (length scale shows a 2 m/s wind speed) and color-coded according to assigned height (color bar shows height scale). The MODIS true-color composite is shown in the left-hand panel (a) for context. Sun glint is apparent in the MODIS composite, which is not found in the GOES imagery because of the difference in viewing geometry between low Earth orbit (LEO) and geostationary Earth orbit (GEO) satellites. The algorithm is unsuccessful in finding matches in the glint region. Any anomalous retrievals (typically << 1%) may be filtered out in a post-processing step or an assimilation quality control test. The case shown is MODIS granule MOD2018196.1700.061 (MODIS band 1) paired with GOES-16 CONUS ABI Band 2. (Note: retrieval sites are thinned 2:1 in each direction for clarity.).
Figure 7.
Retrieved 3D-winds states describe the horizontal wind velocities and their pattern heights. Vector lengths in the righthand panel (b) are scaled in proportion to wind speed (length scale shows a 2 m/s wind speed) and color-coded according to assigned height (color bar shows height scale). The MODIS true-color composite is shown in the left-hand panel (a) for context. Sun glint is apparent in the MODIS composite, which is not found in the GOES imagery because of the difference in viewing geometry between low Earth orbit (LEO) and geostationary Earth orbit (GEO) satellites. The algorithm is unsuccessful in finding matches in the glint region. Any anomalous retrievals (typically << 1%) may be filtered out in a post-processing step or an assimilation quality control test. The case shown is MODIS granule MOD2018196.1700.061 (MODIS band 1) paired with GOES-16 CONUS ABI Band 2. (Note: retrieval sites are thinned 2:1 in each direction for clarity.).
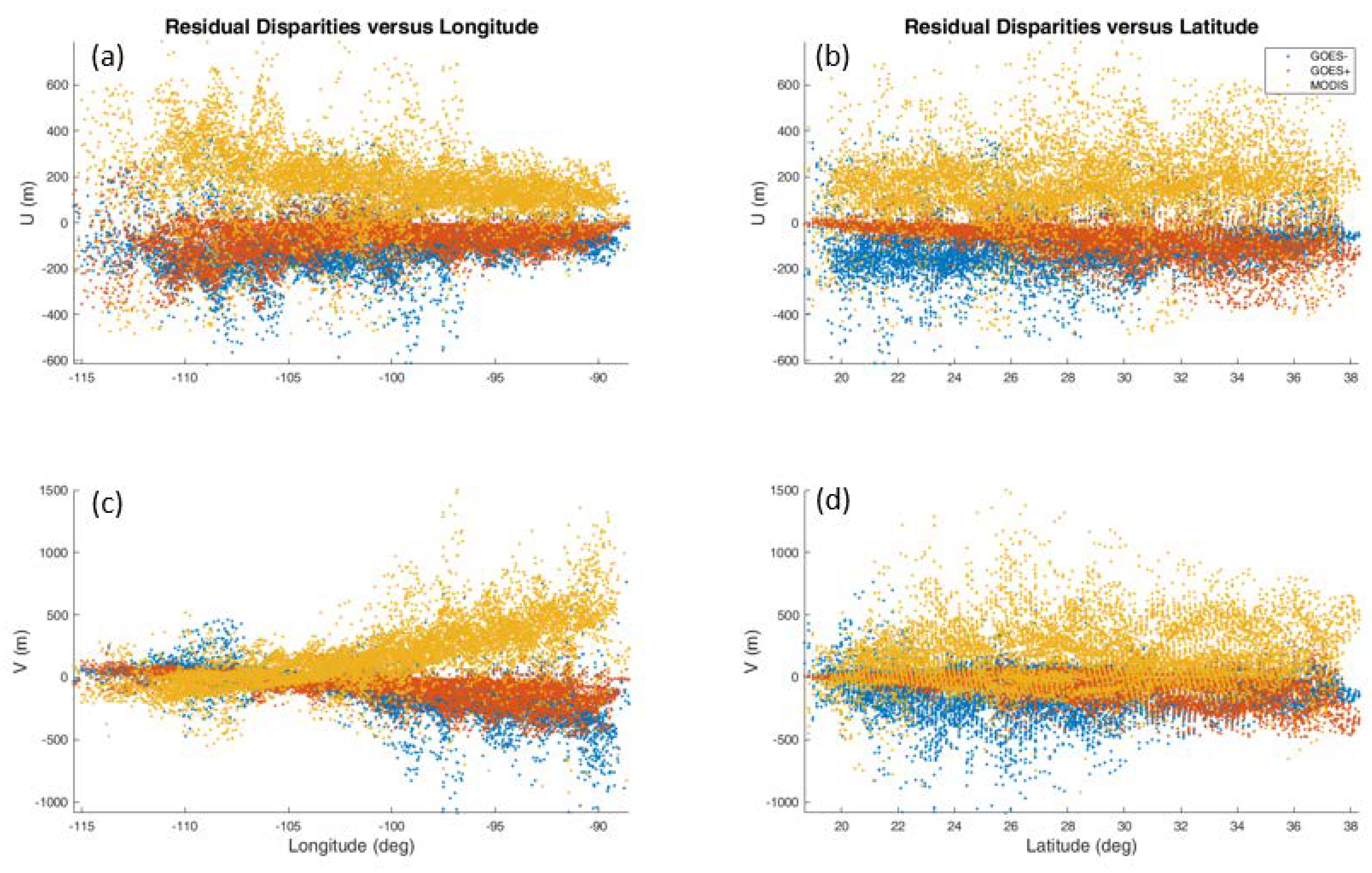
Figure 8.
Residual disparities in the tangent plane after retrievals without correcting for band-to-band registration (BBR) offsets (versus longitude (a,c) and latitude (b,d)). The case shown is MODIS granule MYD2019057.2000.061 (Band 31) paired with GOES-16 CONUS ABI band 14.
Figure 8.
Residual disparities in the tangent plane after retrievals without correcting for band-to-band registration (BBR) offsets (versus longitude (a,c) and latitude (b,d)). The case shown is MODIS granule MYD2019057.2000.061 (Band 31) paired with GOES-16 CONUS ABI band 14.
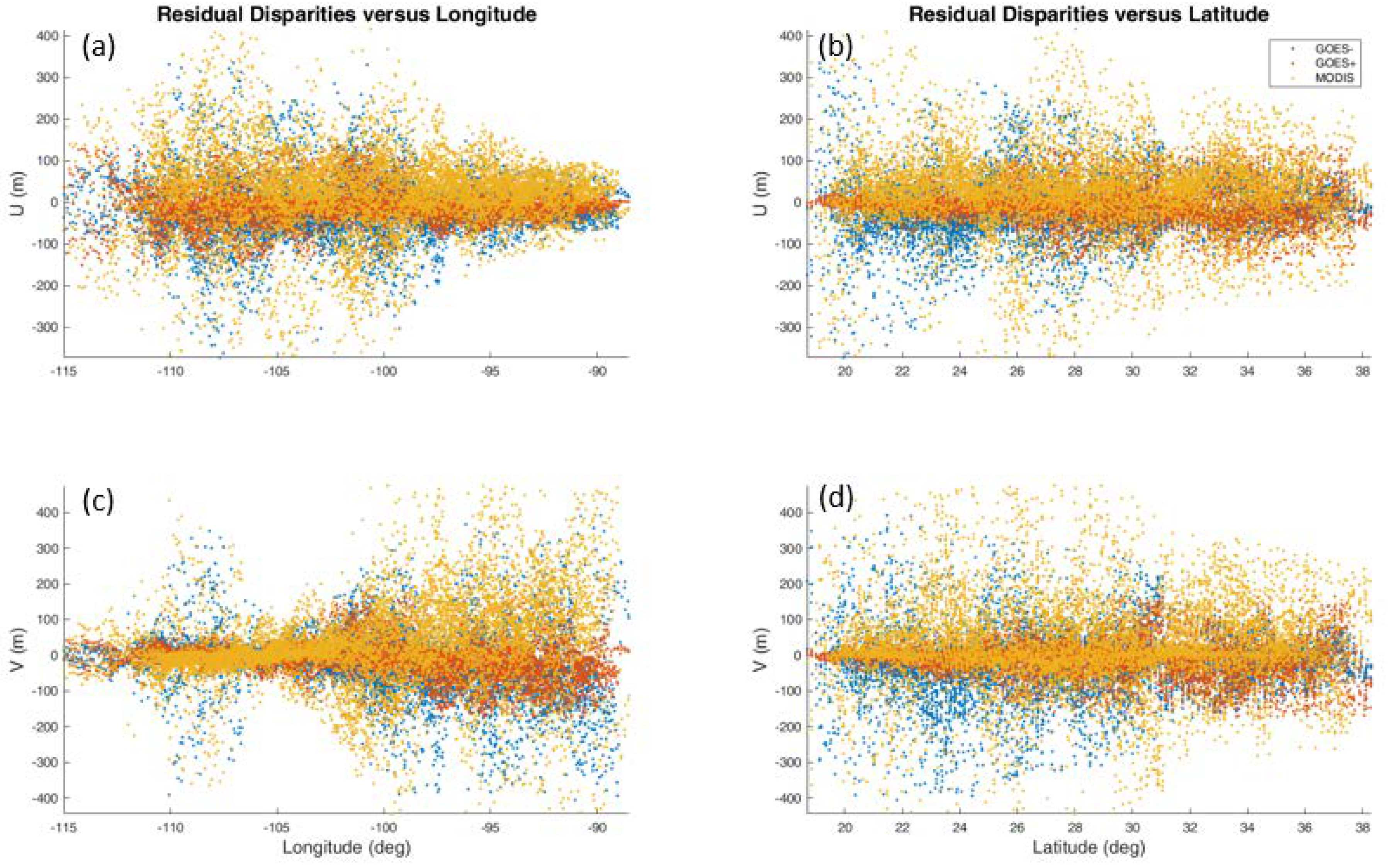
Figure 9.
Residual disparities in the tangent plane after retrievals after correcting for the BBR offsets (versus longitude (a,c) and latitude (b,d)). The case shown is MODIS granule MYD2019057.2000.061 (band 31) paired with GOES-16 CONUS ABI band 14. For context, the ground footprint of an ABI band 14 pixel is 2 km at the subsatellite point
Figure 9.
Residual disparities in the tangent plane after retrievals after correcting for the BBR offsets (versus longitude (a,c) and latitude (b,d)). The case shown is MODIS granule MYD2019057.2000.061 (band 31) paired with GOES-16 CONUS ABI band 14. For context, the ground footprint of an ABI band 14 pixel is 2 km at the subsatellite point
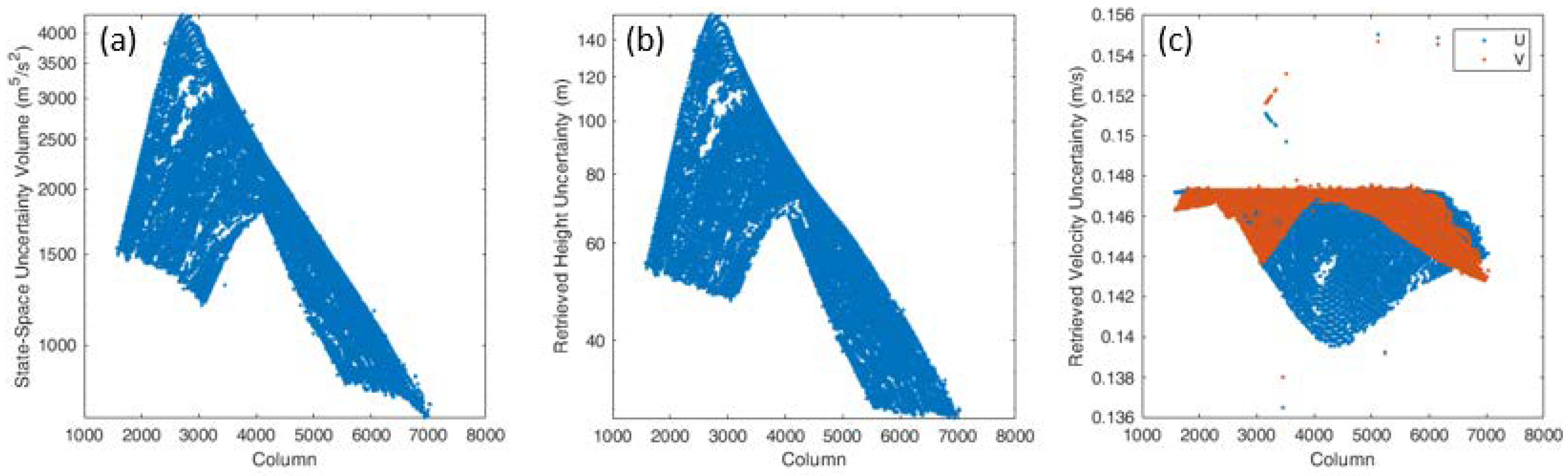
Figure 10.
The state-space uncertainty volume (a) and state standard errors (b,c) are estimated from the covariance matrix from the retrieval performed at each site. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2. Some out-of-family covariances are calculated when the retrieved parallax corrections to site locations place a retrieved site at an inappropriate location. These retrievals are generally filtered out in later quality screening.
Figure 10.
The state-space uncertainty volume (a) and state standard errors (b,c) are estimated from the covariance matrix from the retrieval performed at each site. The case shown is MODIS granule MOD2018196.1700.061 (MODIS Band 1) paired with GOES-16 CONUS ABI Band 2. Some out-of-family covariances are calculated when the retrieved parallax corrections to site locations place a retrieved site at an inappropriate location. These retrievals are generally filtered out in later quality screening.
Figure 11.
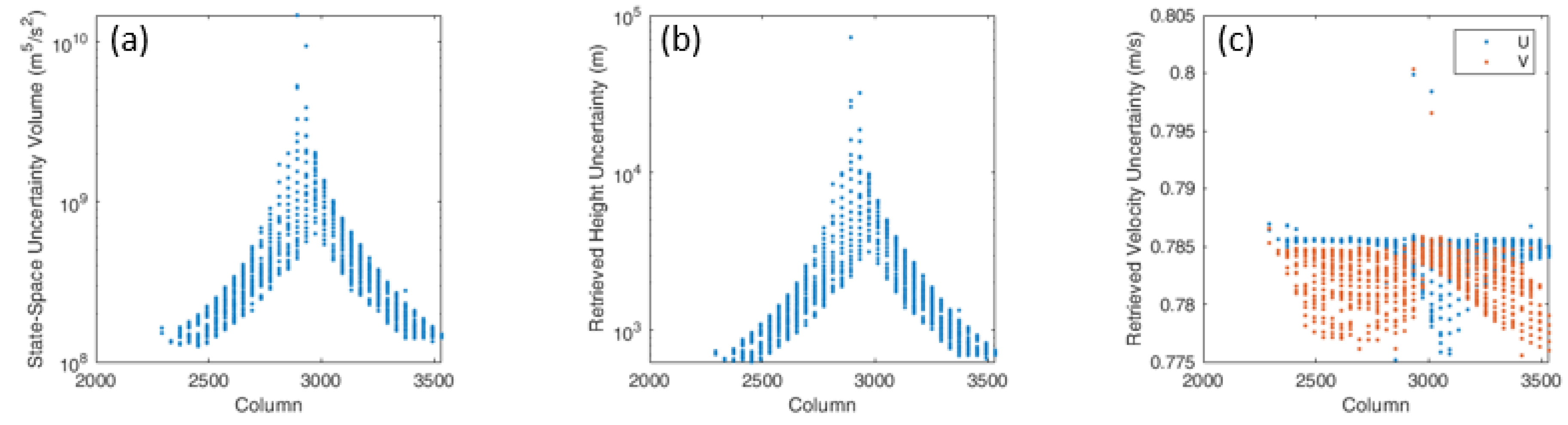
The state-space uncertainty volume (a) and state standard errors (b,c) depend on the geometry of the LEO satellite with respect to the GEO satellite. The state-space uncertainty volume and standard error for the retrieved height become infinite in the singular geometry. The case shown is MOD2019057.1510.061 (MODIS Band 31) paired with GOES-16 Full Disk Band 14. The height uncertainties are larger than those with MODIS Band 1 paired with ABI Band 2 to begin with due to the larger pixel footprint of the IR channels (four times larger in comparison to the finest resolution) and asymptotically approach infinity as the singular geometry is approached. The longer refresh time for a Full Disk scene compared to a CONUS scene will reduce the velocity uncertainties; but real-world features can change shape over longer periods of time, which is an error not represented here.
Figure 11.
The state-space uncertainty volume (a) and state standard errors (b,c) depend on the geometry of the LEO satellite with respect to the GEO satellite. The state-space uncertainty volume and standard error for the retrieved height become infinite in the singular geometry. The case shown is MOD2019057.1510.061 (MODIS Band 31) paired with GOES-16 Full Disk Band 14. The height uncertainties are larger than those with MODIS Band 1 paired with ABI Band 2 to begin with due to the larger pixel footprint of the IR channels (four times larger in comparison to the finest resolution) and asymptotically approach infinity as the singular geometry is approached. The longer refresh time for a Full Disk scene compared to a CONUS scene will reduce the velocity uncertainties; but real-world features can change shape over longer periods of time, which is an error not represented here.
Figure 12.
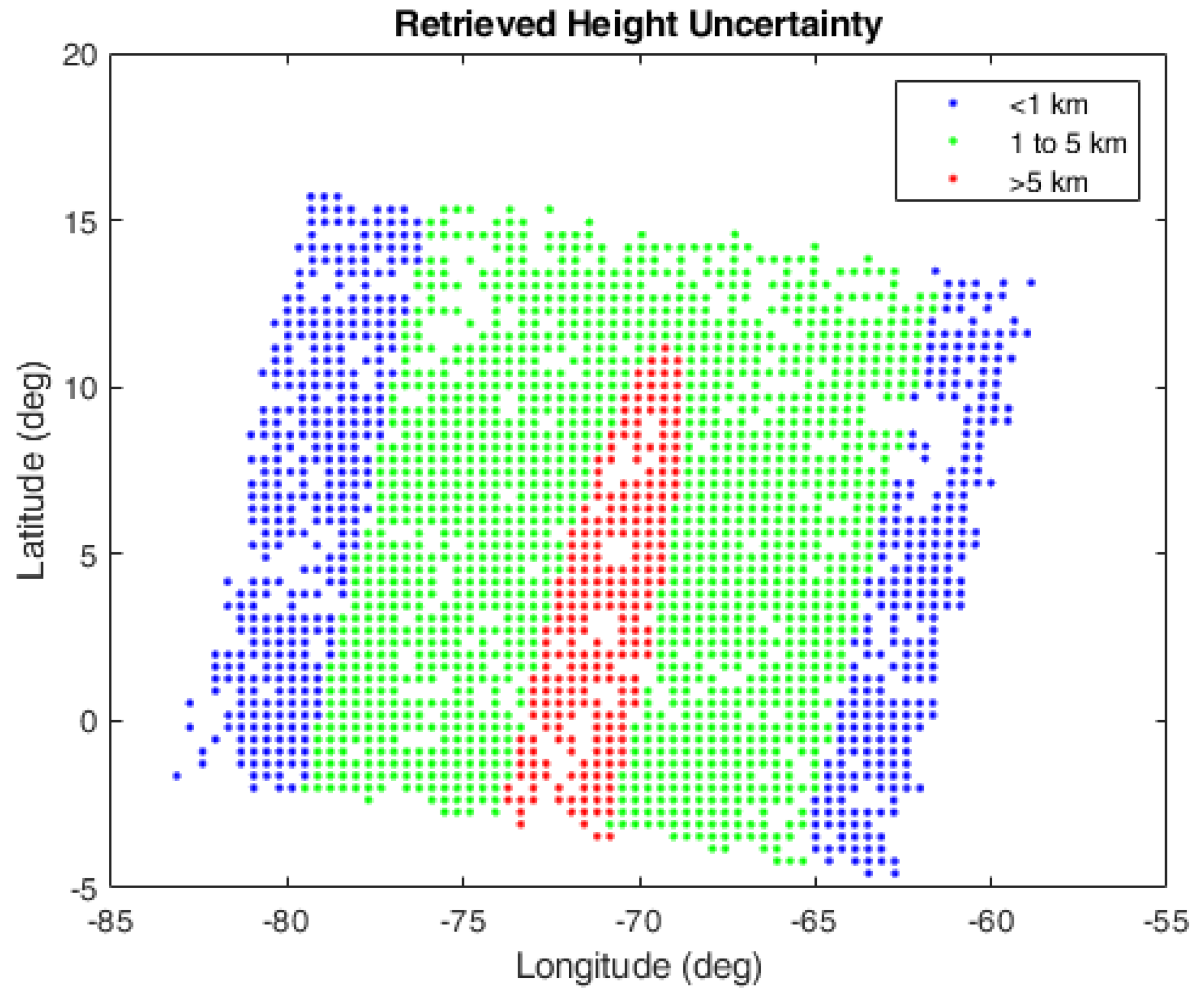
The geographic distribution of retrieved height uncertainty becomes very large when crossing the equator near the GOES subsatellite point, which is where the MODIS scan can be exactly parallel to that of GOES and height becomes unobservable. The case shown is MOD2019057.1510.061 (MODIS Band 31) paired with GOES-16 Full Disk Band 14.
Figure 12.
The geographic distribution of retrieved height uncertainty becomes very large when crossing the equator near the GOES subsatellite point, which is where the MODIS scan can be exactly parallel to that of GOES and height becomes unobservable. The case shown is MOD2019057.1510.061 (MODIS Band 31) paired with GOES-16 Full Disk Band 14.
Figure 13.
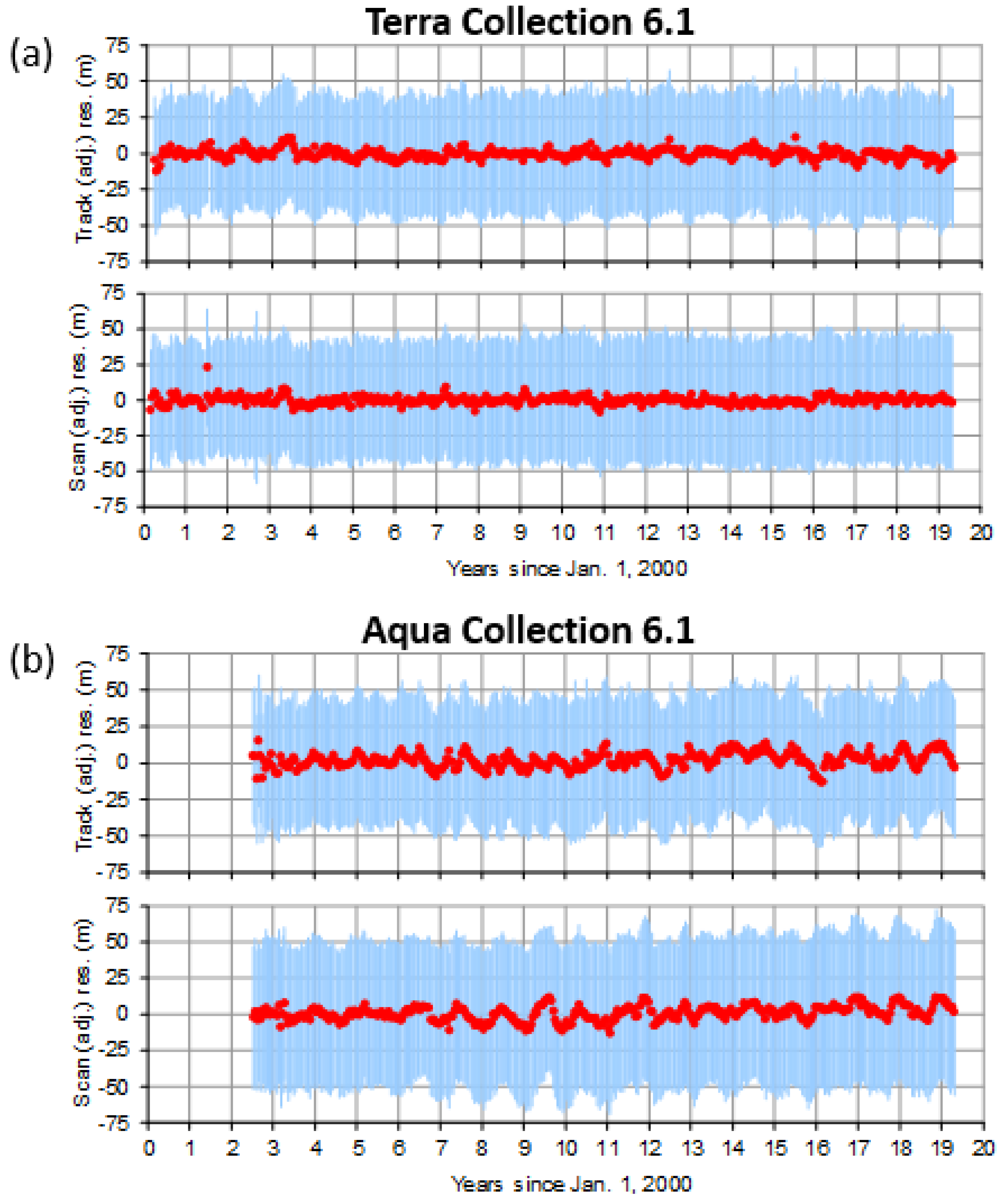
MODIS band 1 measured geolocation error is remarkably stable across all of collection 6.1 for both Terra (a) and Aqua (b). Each point plotted is the sample mean with one-sigma error bars for a 16-day sample of geolocation errors measured using ground control points. The geolocation error has been adjusted to a subsatellite-point equivalent distance and only the daylight portion of the orbit for each satellite is used since MODIS band 1 is a reflective channel.
Figure 13.
MODIS band 1 measured geolocation error is remarkably stable across all of collection 6.1 for both Terra (a) and Aqua (b). Each point plotted is the sample mean with one-sigma error bars for a 16-day sample of geolocation errors measured using ground control points. The geolocation error has been adjusted to a subsatellite-point equivalent distance and only the daylight portion of the orbit for each satellite is used since MODIS band 1 is a reflective channel.
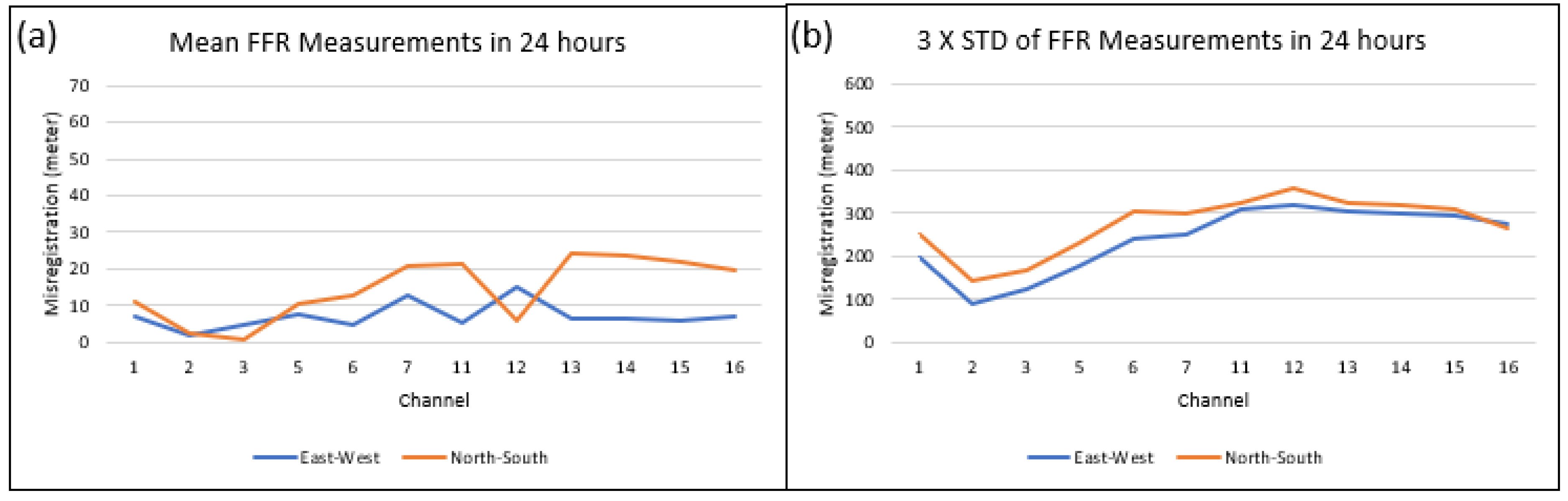
Figure 14.
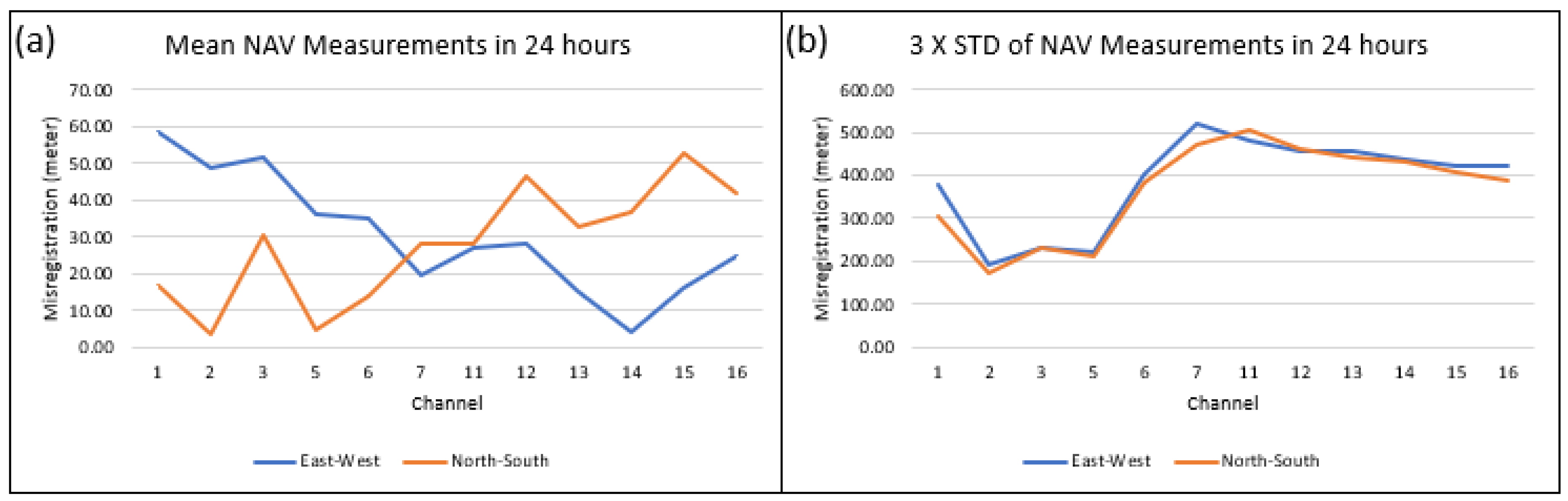
The mean (a) and 3 times standard deviation (b) of navigation error of a 24-hour period (June 1st 18:00 UTC to June 2nd 17:59 UTC 2019) for GOES-16. The misregistration is converted to nadir equivalent distance from the angular space of the fixed grid projection.
Figure 14.
The mean (a) and 3 times standard deviation (b) of navigation error of a 24-hour period (June 1st 18:00 UTC to June 2nd 17:59 UTC 2019) for GOES-16. The misregistration is converted to nadir equivalent distance from the angular space of the fixed grid projection.
Figure 15.
The mean (a) and three times standard deviation (b) of frame-to-frame error of a 24-hour period (June 1st 18:00 UTC to June 2nd 17:59 UTC 2019) for GOES-16. The misregistration is converted to nadir equivalent distance from the angular space of the fixed grid projection.
Figure 15.
The mean (a) and three times standard deviation (b) of frame-to-frame error of a 24-hour period (June 1st 18:00 UTC to June 2nd 17:59 UTC 2019) for GOES-16. The misregistration is converted to nadir equivalent distance from the angular space of the fixed grid projection.
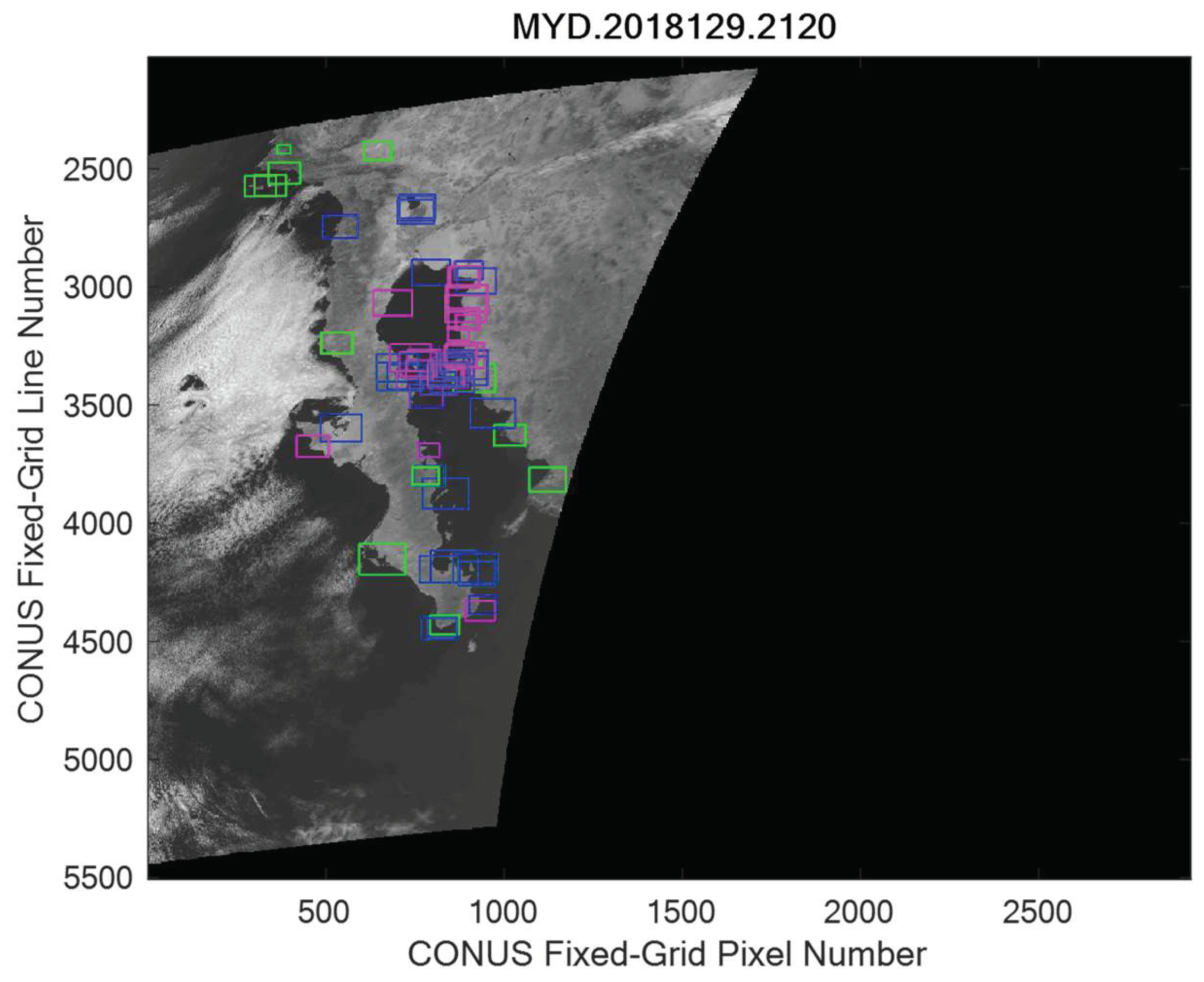
Figure 16.
The performance assessment tool set (IPATS) Landsat 8 templates can measure any residual geometric error in the remapped MODIS granule. The outlines are color-coded in accordance with the normalized cross correlation (NCC) peak value (magenta > 0.95, blue > 0.9, and green > 0.5).
Figure 16.
The performance assessment tool set (IPATS) Landsat 8 templates can measure any residual geometric error in the remapped MODIS granule. The outlines are color-coded in accordance with the normalized cross correlation (NCC) peak value (magenta > 0.95, blue > 0.9, and green > 0.5).
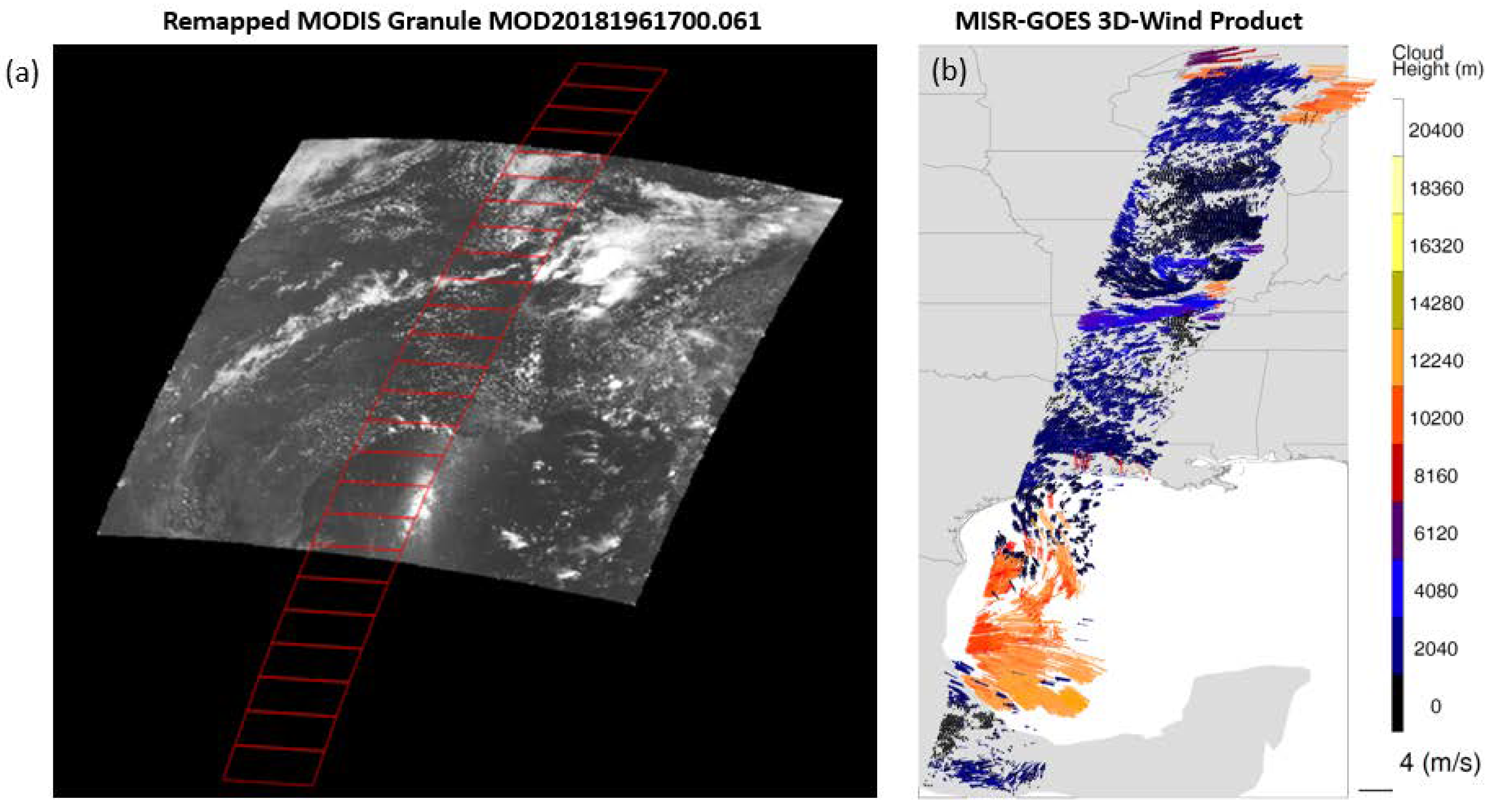
Figure 17.
A MODIS granule that has been remapped into the GOES ABI fixed-grid projection is overlaid with red boxes at the left (a) showing the blocks in the MISR path intersecting the granule. The MISR-GOES 3D-wind product is shown at the right (b). The MODIS granule is MOD2018196.1700.061 (MODIS Band 1) and is simultaneous with MISR Path 24, Orbit 98797. (Note: retrieval sites are thinned 4:1 in each direction for clarity).
Figure 17.
A MODIS granule that has been remapped into the GOES ABI fixed-grid projection is overlaid with red boxes at the left (a) showing the blocks in the MISR path intersecting the granule. The MISR-GOES 3D-wind product is shown at the right (b). The MODIS granule is MOD2018196.1700.061 (MODIS Band 1) and is simultaneous with MISR Path 24, Orbit 98797. (Note: retrieval sites are thinned 4:1 in each direction for clarity).
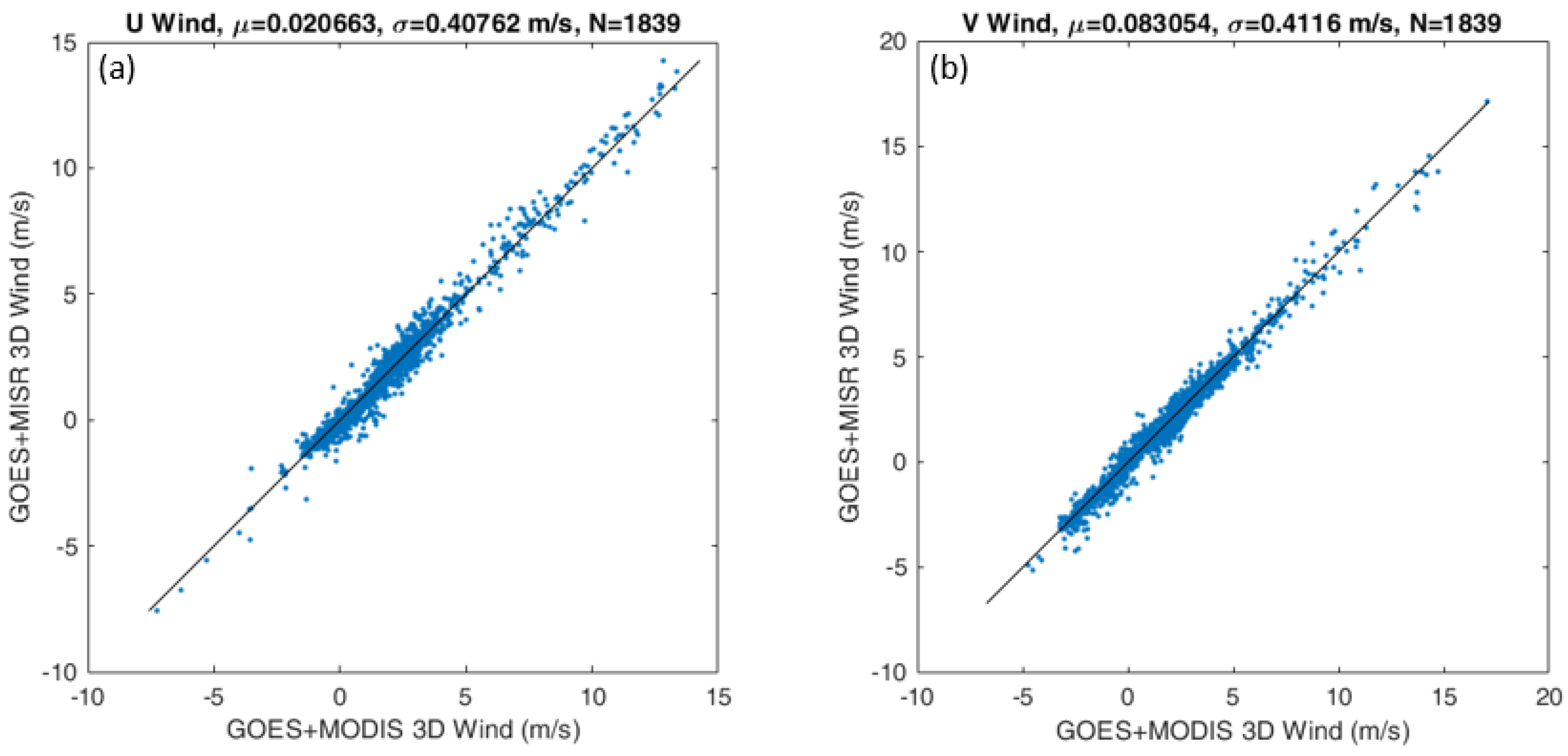
Figure 18.
Retrieved winds from MODIS and GOES are compared to retrievals from MISR and GOES in the U (+East) and V (+North) directions on the tangent plane to the WGS84 ellipsoid in (a) and (b) respectively. The diagonal line is the perfect match, and robust statistics (mean μ and standard deviation σ, over sample size N) are computed over the retrieval differences. The Median Absolute Difference (MAD) filter technique is used with a six-sigma threshold to edit out spurious pairings then the regular mean and standard deviation are computed over the remaining population. The MODIS granule is MOD2018196.1700.061 (MODIS Band 1) and is simultaneous with MISR Path 24, Orbit 98797.
Figure 18.
Retrieved winds from MODIS and GOES are compared to retrievals from MISR and GOES in the U (+East) and V (+North) directions on the tangent plane to the WGS84 ellipsoid in (a) and (b) respectively. The diagonal line is the perfect match, and robust statistics (mean μ and standard deviation σ, over sample size N) are computed over the retrieval differences. The Median Absolute Difference (MAD) filter technique is used with a six-sigma threshold to edit out spurious pairings then the regular mean and standard deviation are computed over the remaining population. The MODIS granule is MOD2018196.1700.061 (MODIS Band 1) and is simultaneous with MISR Path 24, Orbit 98797.
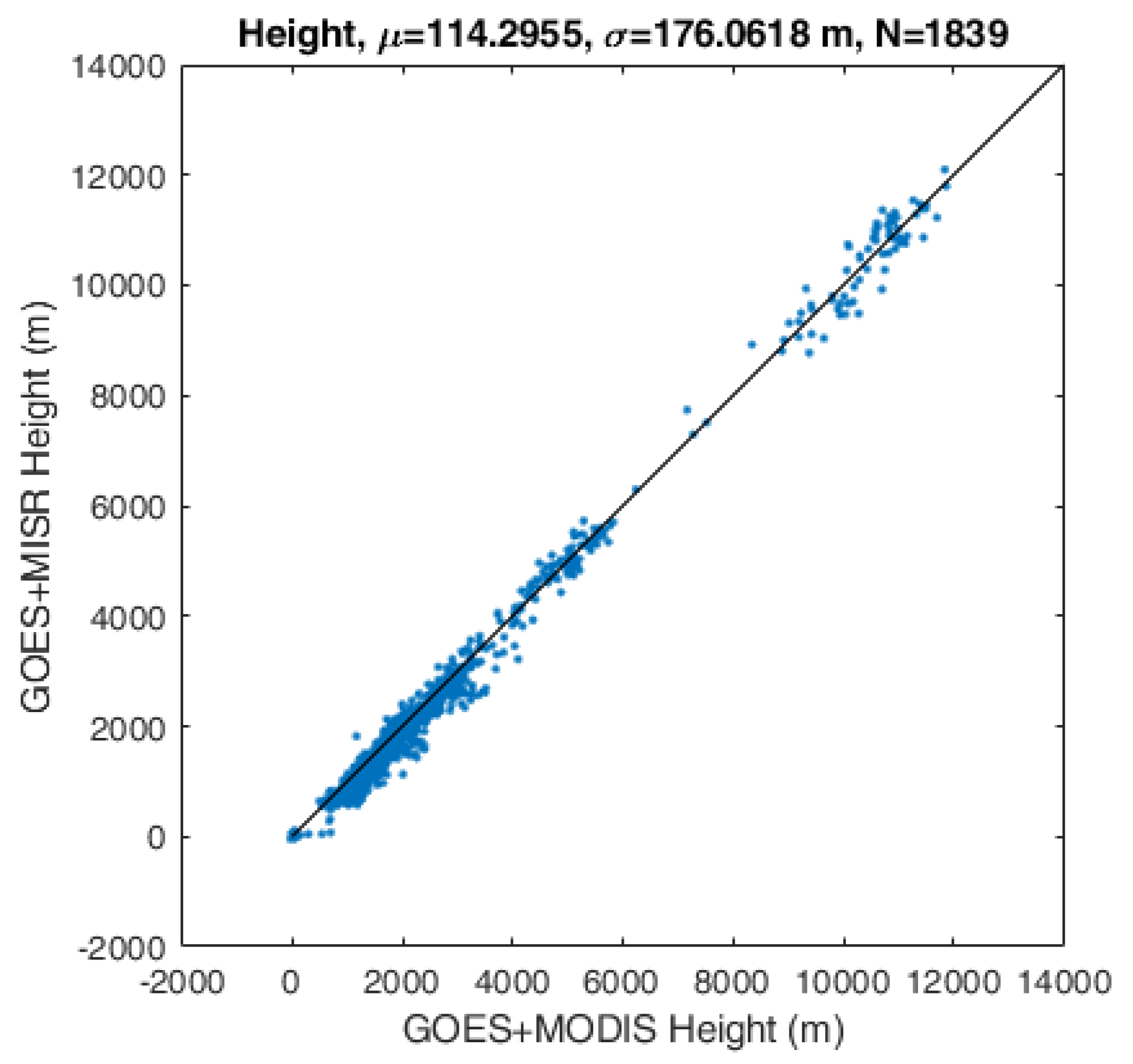
Figure 19.
Jointly retrieved wind heights are compared between the MODIS-GOES and MISR-GOES cases with robust statistic on their differences (mean μ and standard deviation σ, over sample size N). The heights are with respect to the WGS84 ellipsoid. The MODIS granule is MOD2018196.1700.061 and is simultaneous with MISR Path 24, Orbit 98797.
Figure 19.
Jointly retrieved wind heights are compared between the MODIS-GOES and MISR-GOES cases with robust statistic on their differences (mean μ and standard deviation σ, over sample size N). The heights are with respect to the WGS84 ellipsoid. The MODIS granule is MOD2018196.1700.061 and is simultaneous with MISR Path 24, Orbit 98797.
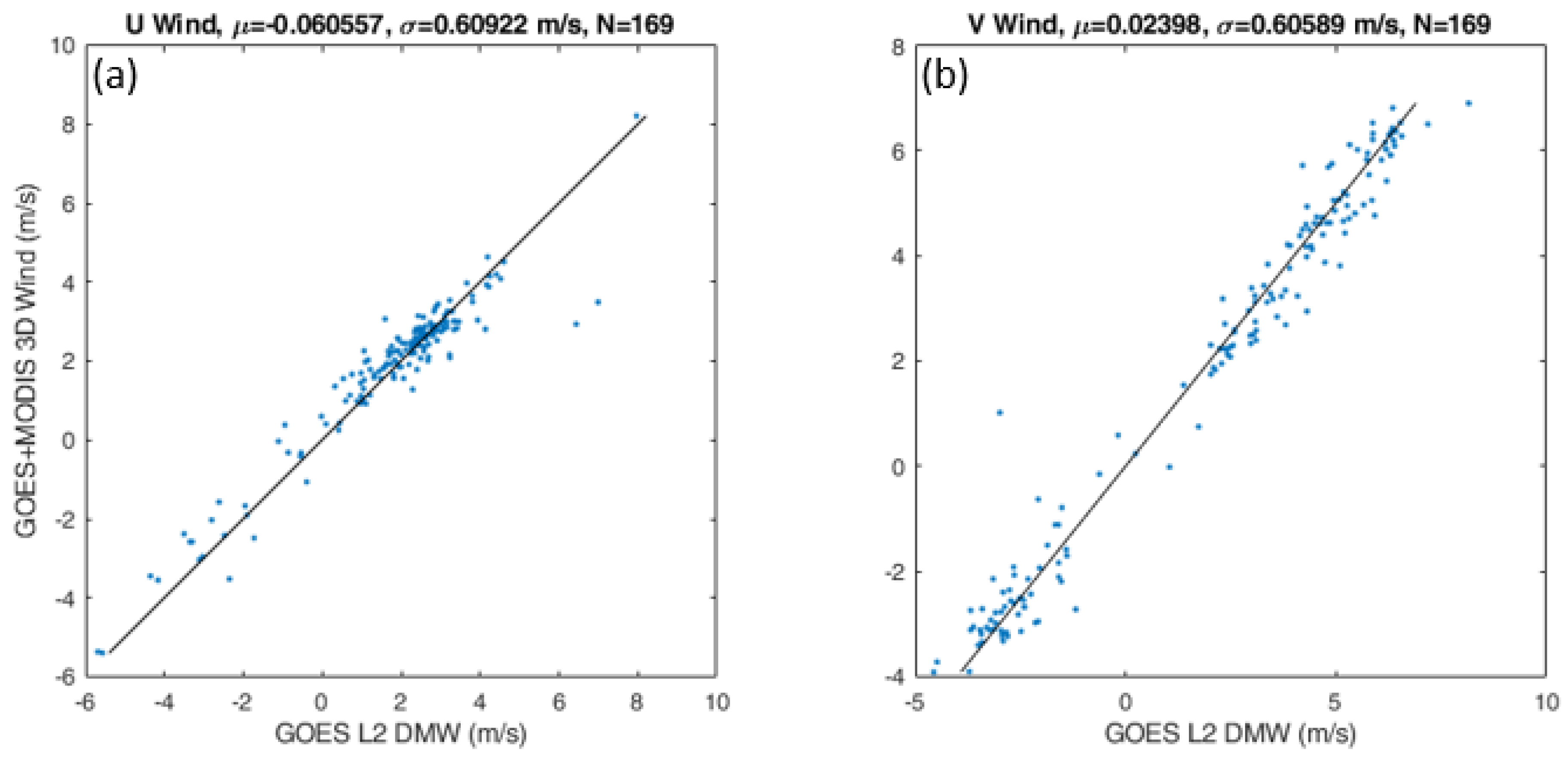
Figure 20.
Retrieved MODIS-GOES winds are compared with the NOAA operational derived motion wind (DMW) product along the U axis (a) and V axis (b). The diagonal line is the perfect match, and the statistics are computed over the retrieval differences (mean μ and standard deviation σ, over sample size N). The MODIS granule is MOD2018196.1700.061 and the DMW product is for ABI band 2 and the CONUS scene with product time 2018/196 17:02.
Figure 20.
Retrieved MODIS-GOES winds are compared with the NOAA operational derived motion wind (DMW) product along the U axis (a) and V axis (b). The diagonal line is the perfect match, and the statistics are computed over the retrieval differences (mean μ and standard deviation σ, over sample size N). The MODIS granule is MOD2018196.1700.061 and the DMW product is for ABI band 2 and the CONUS scene with product time 2018/196 17:02.
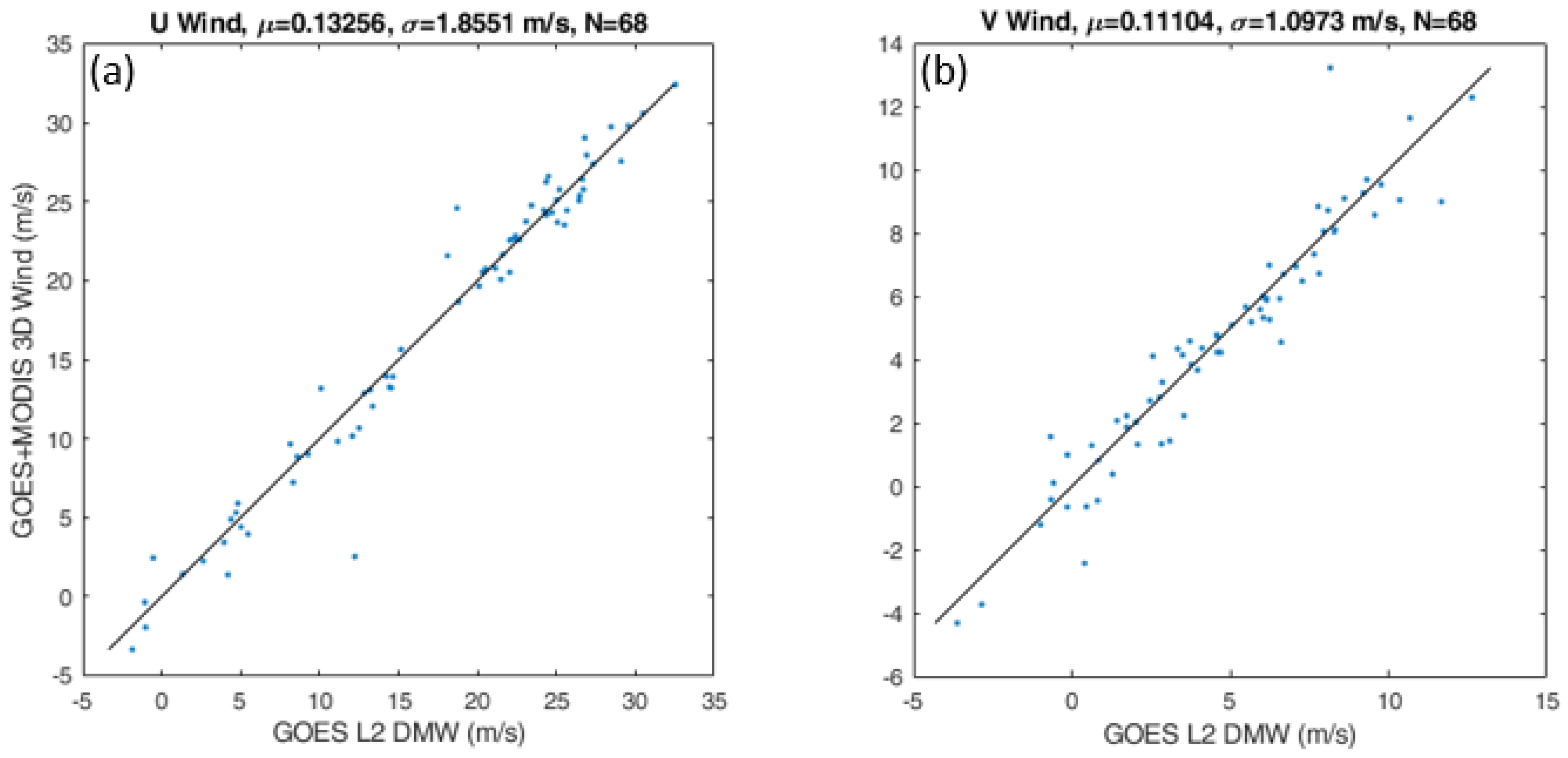
Figure 21.
Retrieved MODIS-GOES winds are compared with the NOAA operational DMW product for an IR case along the U axis (a) and V axis (b). The diagonal line is the perfect match, and the statistics are computed over the retrieval differences (mean μ and standard deviation σ, over sample size N). The MODIS granule is MOD2019057.2000.061 and the DMW product is for ABI band 14 and the CONUS scene with product time 2019/057 20:02.
Figure 21.
Retrieved MODIS-GOES winds are compared with the NOAA operational DMW product for an IR case along the U axis (a) and V axis (b). The diagonal line is the perfect match, and the statistics are computed over the retrieval differences (mean μ and standard deviation σ, over sample size N). The MODIS granule is MOD2019057.2000.061 and the DMW product is for ABI band 14 and the CONUS scene with product time 2019/057 20:02.
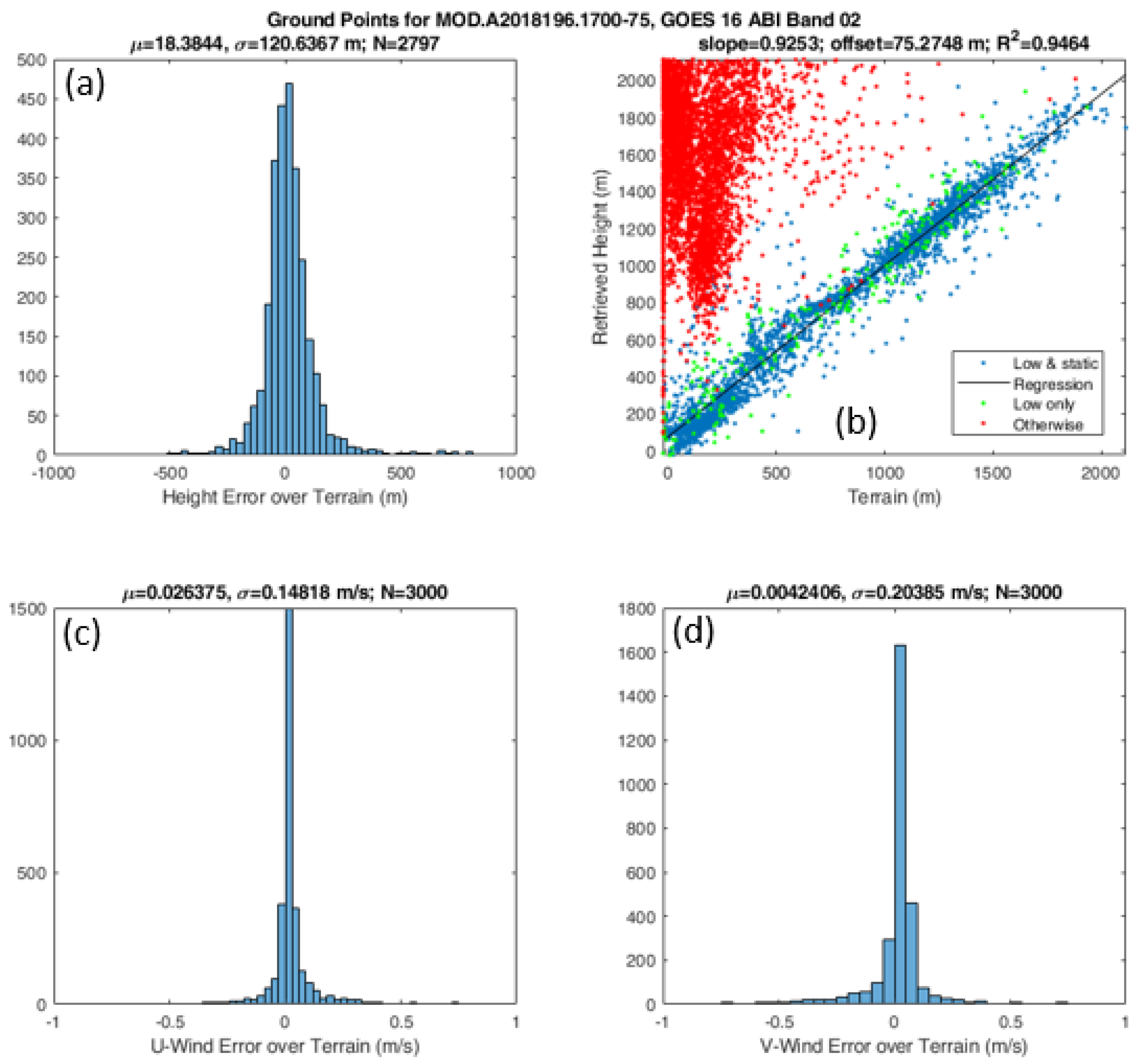
Figure 22.
Clear-sky ground retrievals from the MODIS-GOES 3D-winds show the accuracies of retrieved heights (a) and velocities (c,d). The mean μ and standard deviation σ over sample size N are computed for each histogram and the regression parameters (b) for retrieved height versus terrain height are reported for the ground-point class (“Low and static”). The MODIS granule is MOD2018196.1700.061 (MODIS band 1).
Figure 22.
Clear-sky ground retrievals from the MODIS-GOES 3D-winds show the accuracies of retrieved heights (a) and velocities (c,d). The mean μ and standard deviation σ over sample size N are computed for each histogram and the regression parameters (b) for retrieved height versus terrain height are reported for the ground-point class (“Low and static”). The MODIS granule is MOD2018196.1700.061 (MODIS band 1).
Figure 23.
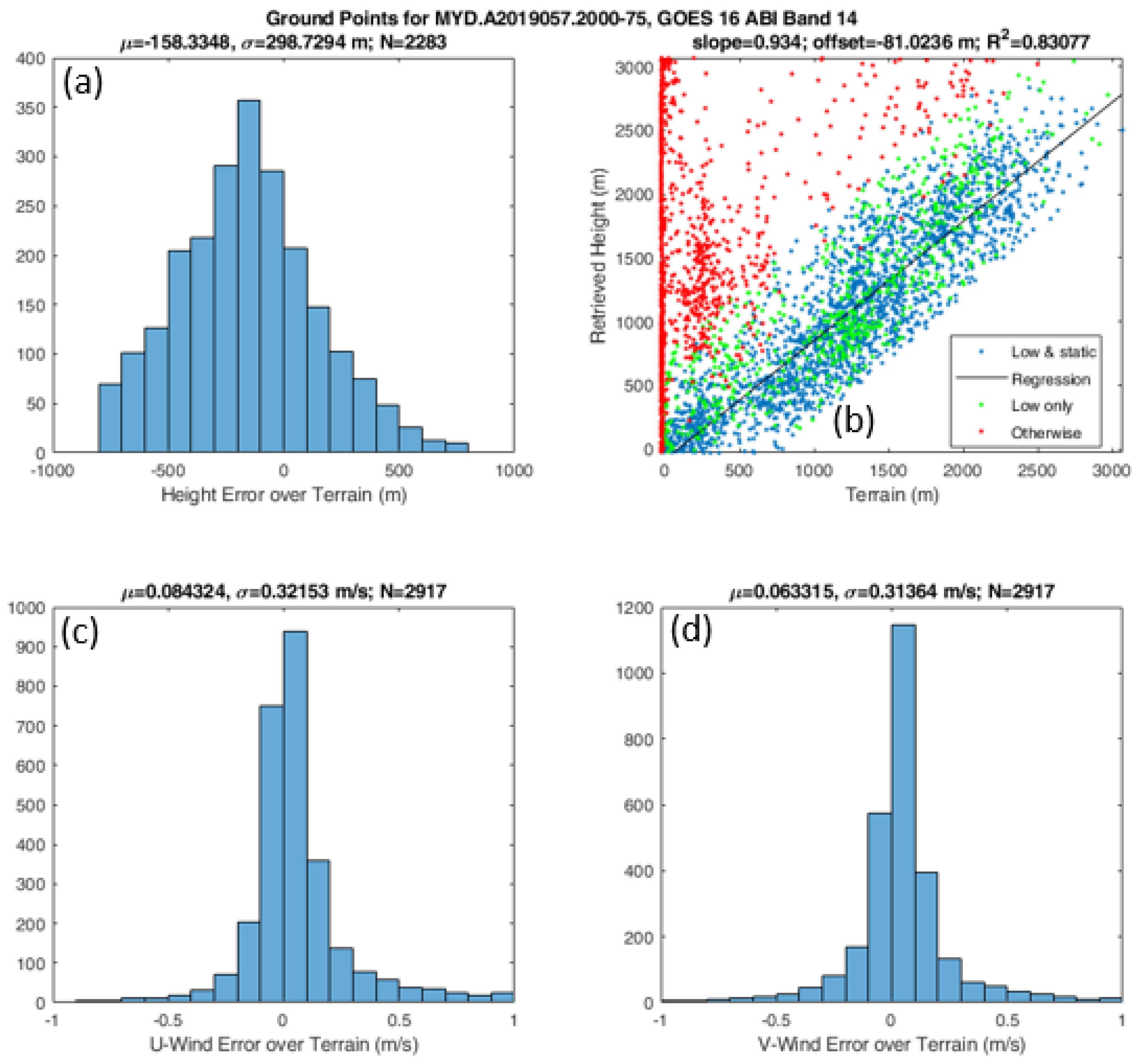
Clear-sky ground retrievals from the MODIS-GOES 3D-winds show the accuracies of retrieved heights (a) and velocities (c,d) for an infrared (IR) case. The mean μ and standard deviation σ over sample size N are computed for each histogram and the regression parameters (b) for retrieved height versus terrain height are reported for the ground-point class (“Low and static”). The MODIS granule is MOD2019057.2000.061 paired with ABI Band 14, CONUS scene time 2019/057 20:02.
Figure 23.
Clear-sky ground retrievals from the MODIS-GOES 3D-winds show the accuracies of retrieved heights (a) and velocities (c,d) for an infrared (IR) case. The mean μ and standard deviation σ over sample size N are computed for each histogram and the regression parameters (b) for retrieved height versus terrain height are reported for the ground-point class (“Low and static”). The MODIS granule is MOD2019057.2000.061 paired with ABI Band 14, CONUS scene time 2019/057 20:02.
Figure 24.
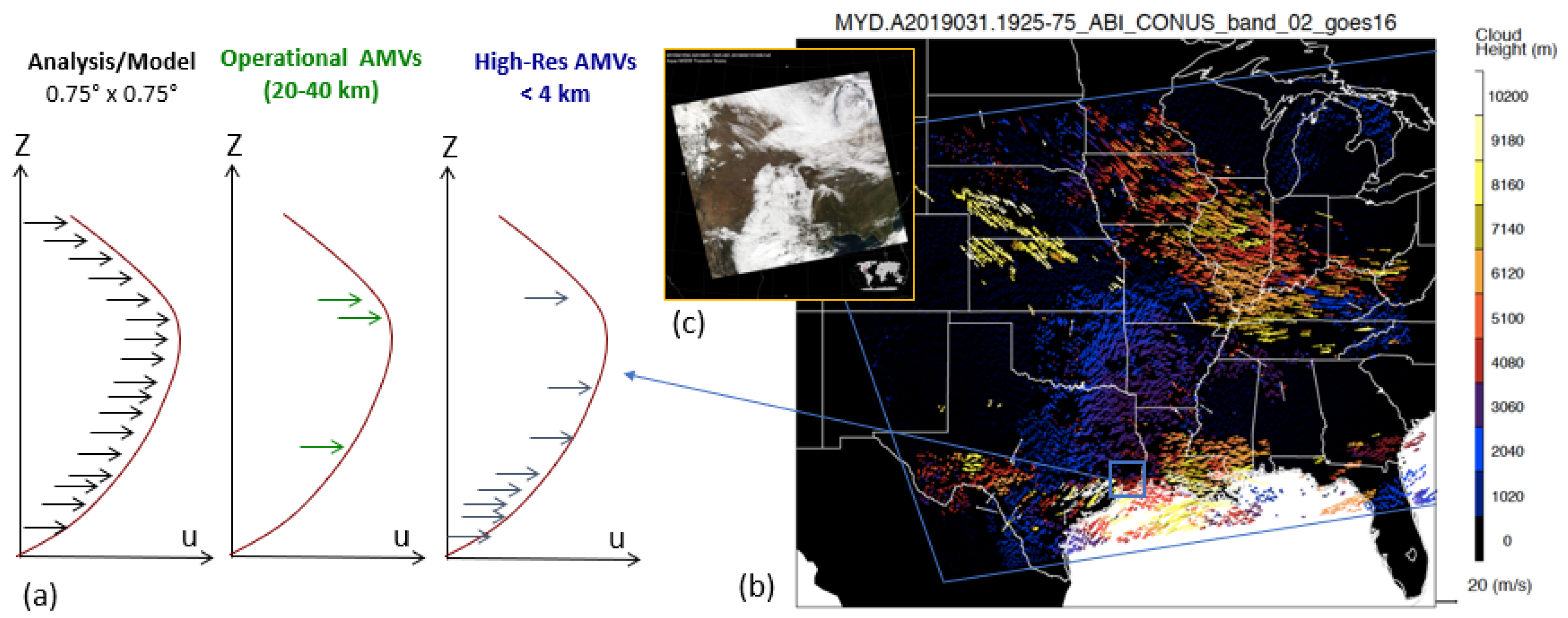
(a) Illustration of the improvement from high-resolution (<4 km) AMVs in representing a quasi-3D synoptic flow. Compared to conventional AMV retrievals at a coarser resolution, the high-resolution algorithm provides more vertical levels of AMVs that can be assimilated in the NWP system. (b) AMVs at 2 km horizontal resolution from the MODIS-GOES retrieval on January 31, 2019 when a cold Arctic system dipped down to CONUS and created severe winter storms in most of the northern states (c). The height of wind vectors is color coded and shows a range of AMV heights from the surface to ~11 km. The blue lines indicate the borders of MODIS image granule in this case (as shown in the embedded image).
Figure 24.
(a) Illustration of the improvement from high-resolution (<4 km) AMVs in representing a quasi-3D synoptic flow. Compared to conventional AMV retrievals at a coarser resolution, the high-resolution algorithm provides more vertical levels of AMVs that can be assimilated in the NWP system. (b) AMVs at 2 km horizontal resolution from the MODIS-GOES retrieval on January 31, 2019 when a cold Arctic system dipped down to CONUS and created severe winter storms in most of the northern states (c). The height of wind vectors is color coded and shows a range of AMV heights from the surface to ~11 km. The blue lines indicate the borders of MODIS image granule in this case (as shown in the embedded image).
Figure 25.
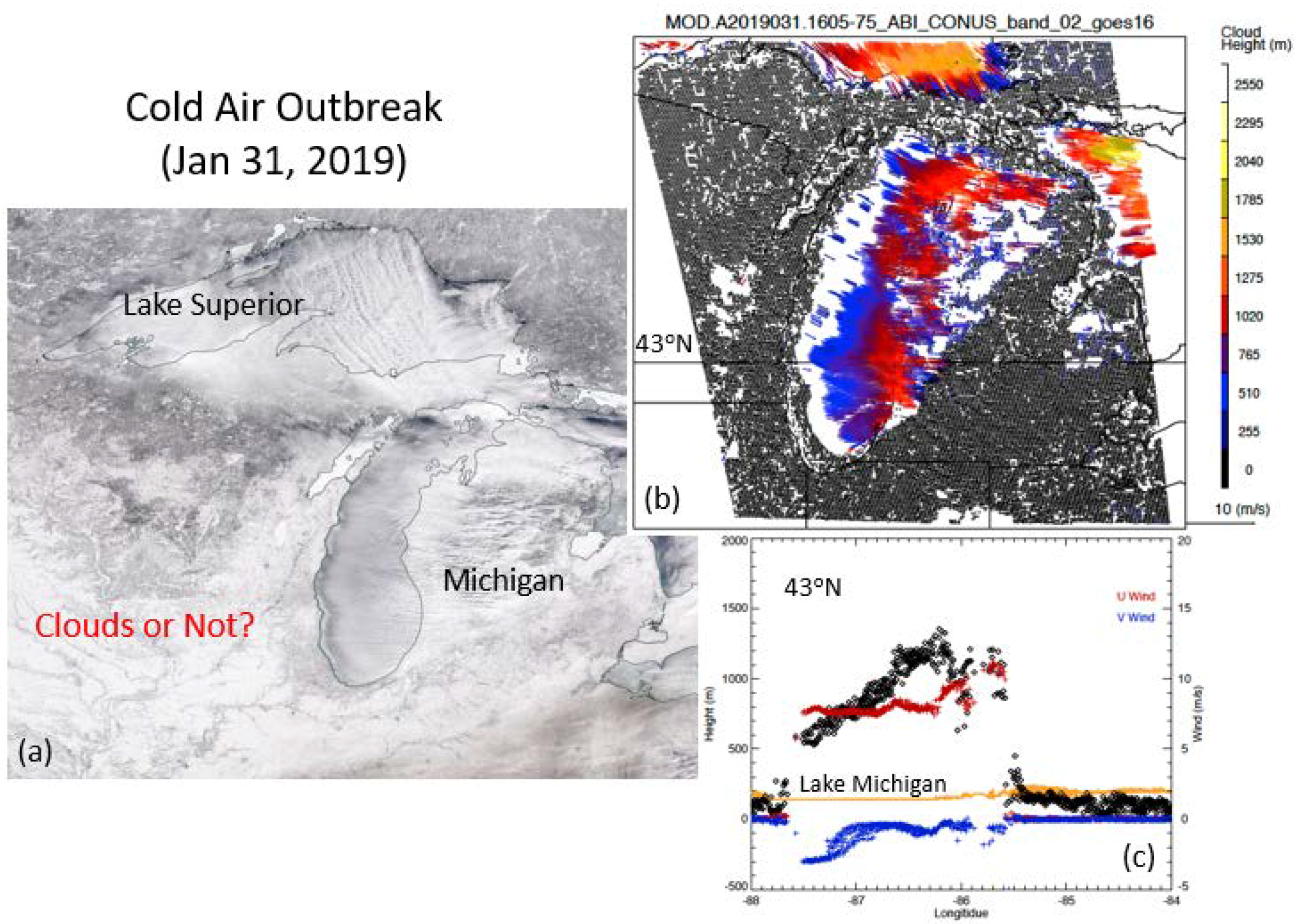
PBL cloud streets are readily seen from the cold air outbreak (CAO) event (
a) over Lakes Superior and Michigan (shown at larger scale in
Figure 24).
The bottom-right panel (
c) is a cross-section of the full set of retrievals (
b) at 43° N latitude where terrain height is in orange and the stereo height is in black, showing PBL clouds rising in height from 400 m to 1100 m over Lake Michigan, as cold air blows over the relatively warmer water. Heavy snow often occurs downstream from the lake, as a result of the so-called ‘lake effect’.
Figure 25.
PBL cloud streets are readily seen from the cold air outbreak (CAO) event (
a) over Lakes Superior and Michigan (shown at larger scale in
Figure 24).
The bottom-right panel (
c) is a cross-section of the full set of retrievals (
b) at 43° N latitude where terrain height is in orange and the stereo height is in black, showing PBL clouds rising in height from 400 m to 1100 m over Lake Michigan, as cold air blows over the relatively warmer water. Heavy snow often occurs downstream from the lake, as a result of the so-called ‘lake effect’.
Figure 26.
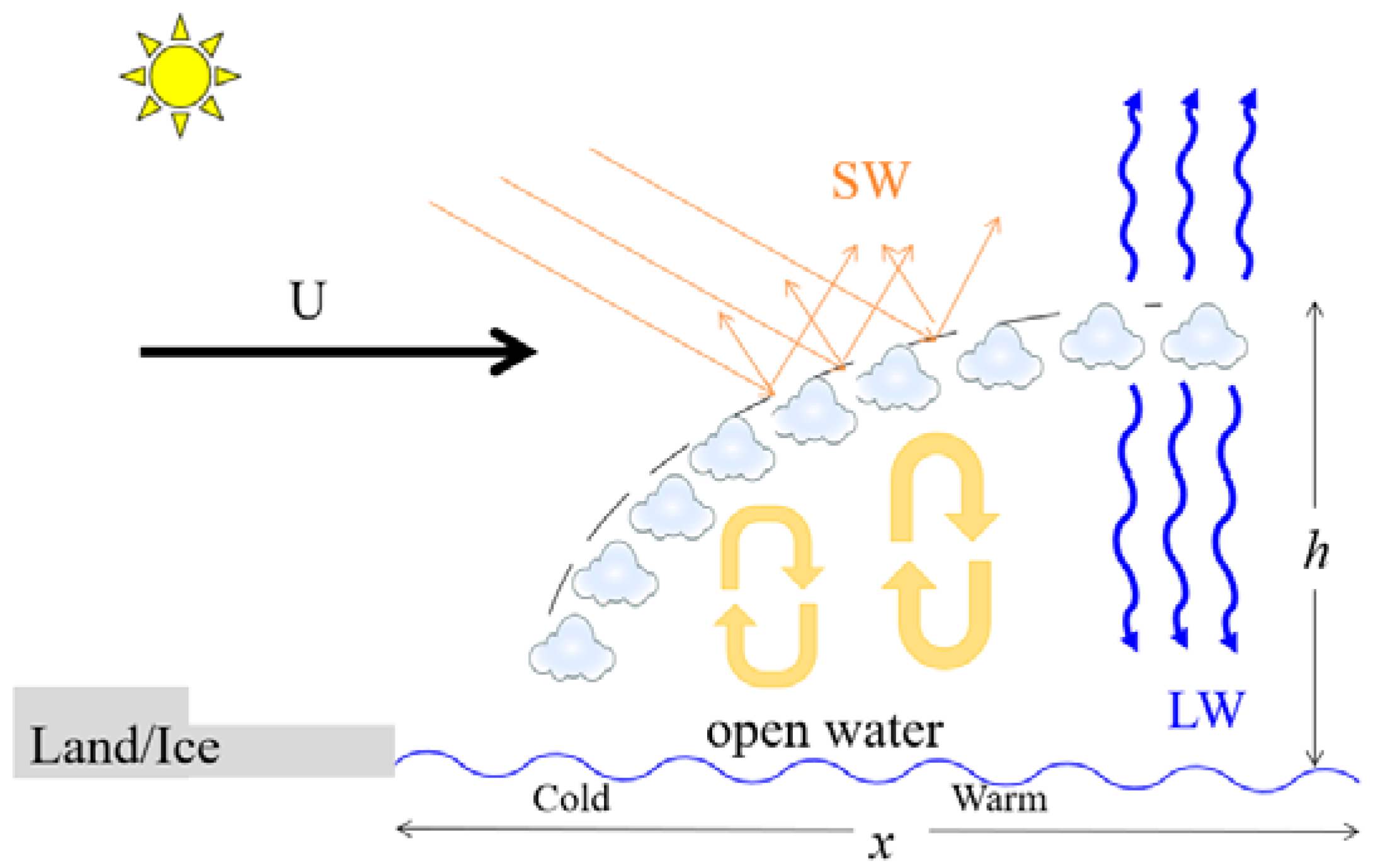
A schematic diagram to illustrate interactions between cold air and warmer water in producing a rising boundary-layer top over open water during the CAO event.
Figure 26.
A schematic diagram to illustrate interactions between cold air and warmer water in producing a rising boundary-layer top over open water during the CAO event.
Figure 27.
As in
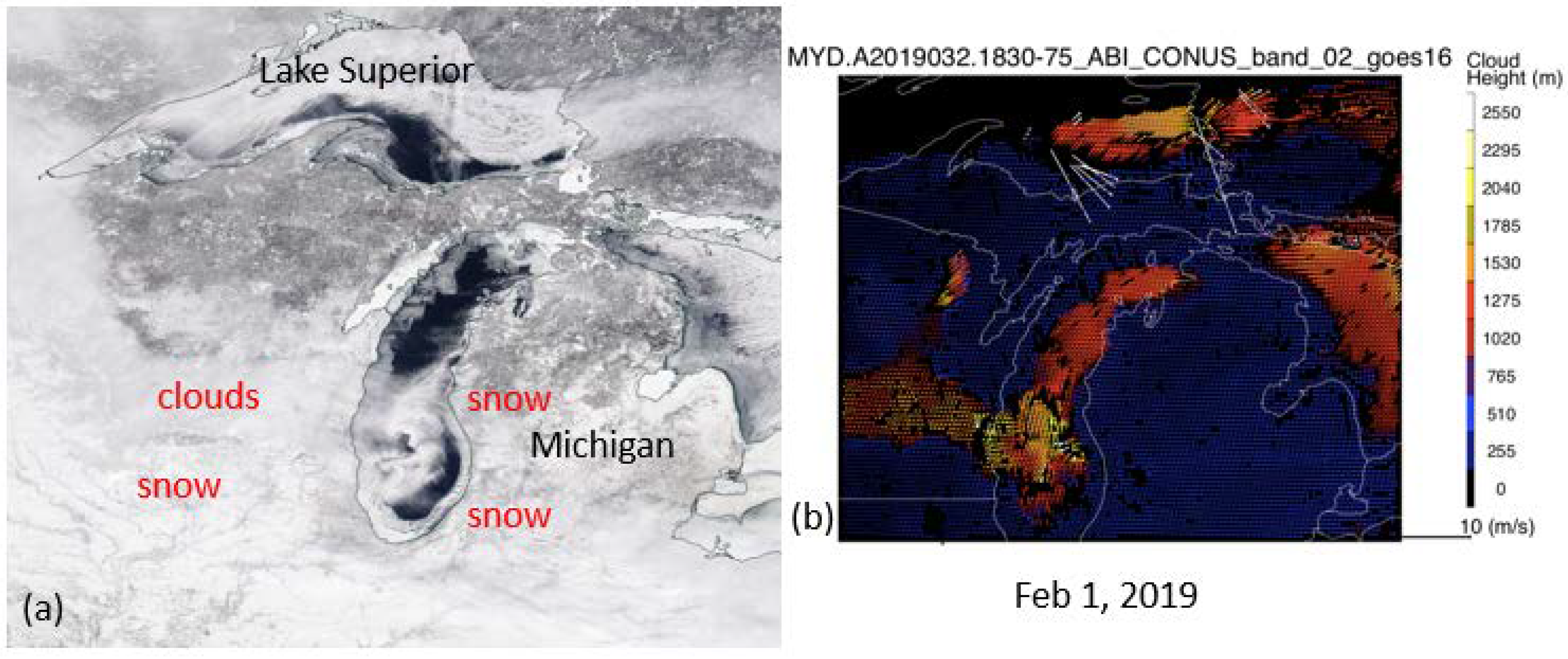
Figure 25 but for Feb.1, 2019 when the winds over Lake Michigan (
a) changed their direction drastically and the PBL clouds were aloft at the approximately same altitude (
b).
Figure 27.
As in
Figure 25 but for Feb.1, 2019 when the winds over Lake Michigan (
a) changed their direction drastically and the PBL clouds were aloft at the approximately same altitude (
b).
Figure 28.
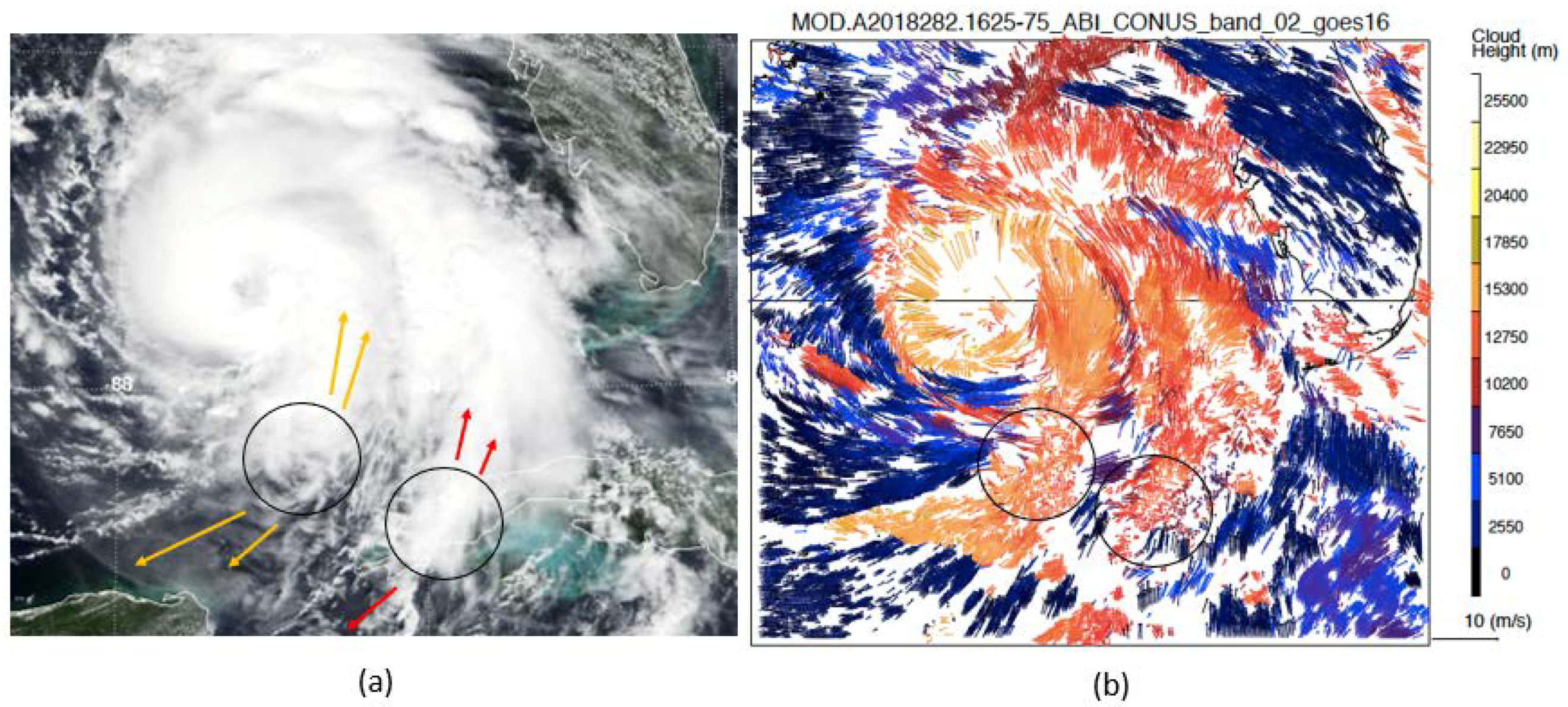
(a) MODIS image of Hurricane Michael on October 9, 2018 with the circles indicating deep convective zones and the arrows for wind direction. (b) Retrieved AMVs from ABI band 2 with height in color. The circles highlight small AMV wind speeds at high altitudes.
Figure 28.
(a) MODIS image of Hurricane Michael on October 9, 2018 with the circles indicating deep convective zones and the arrows for wind direction. (b) Retrieved AMVs from ABI band 2 with height in color. The circles highlight small AMV wind speeds at high altitudes.
Figure 29.
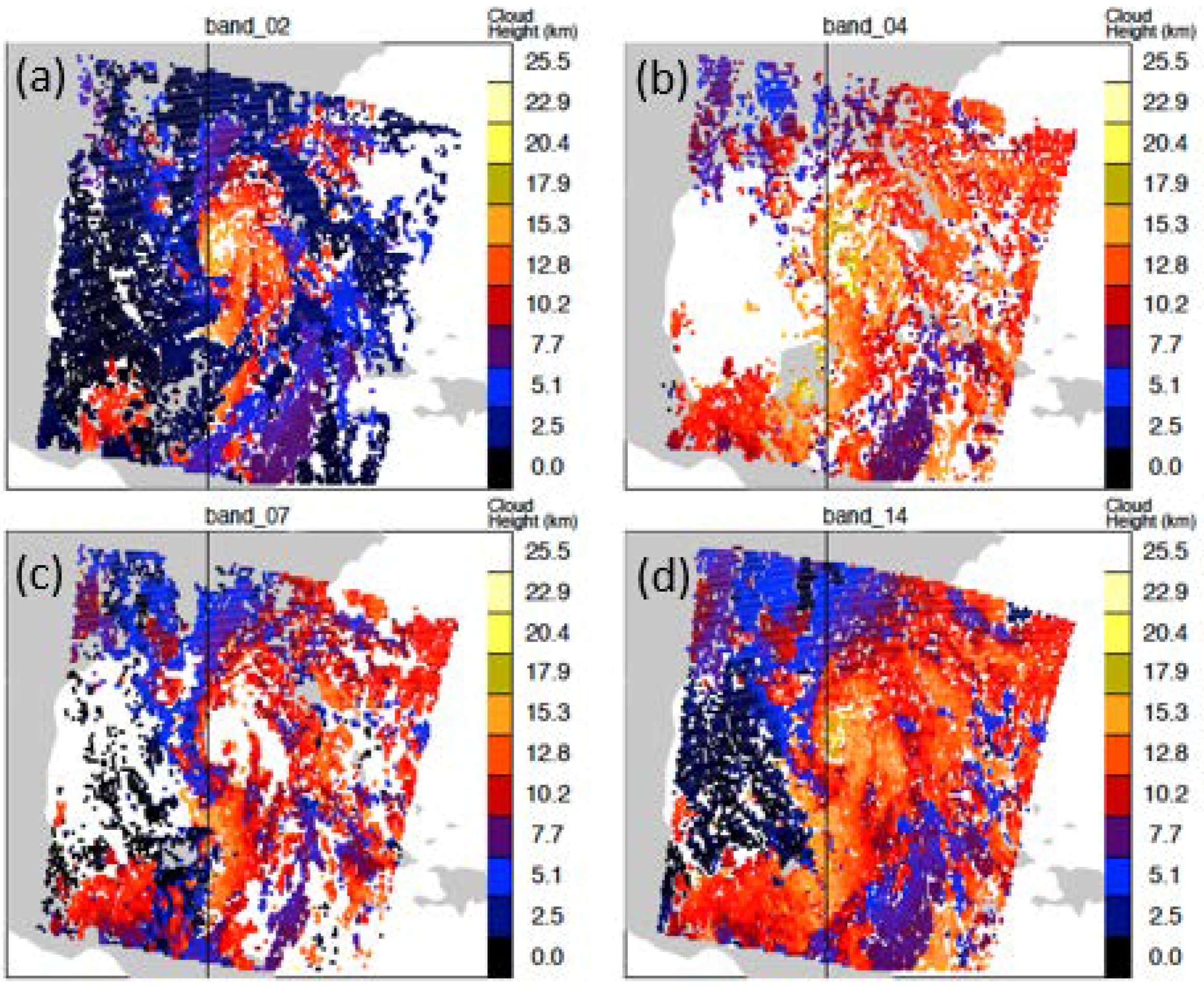
Distributions of the AMV height retrieval (chip size 32 × 32 km) for the four spectral bands (ABI bands 2, 4, 7, and 14 in panels (a–d) respectively). The vertical line is 87.5° W longitude.
Figure 29.
Distributions of the AMV height retrieval (chip size 32 × 32 km) for the four spectral bands (ABI bands 2, 4, 7, and 14 in panels (a–d) respectively). The vertical line is 87.5° W longitude.
Figure 30.
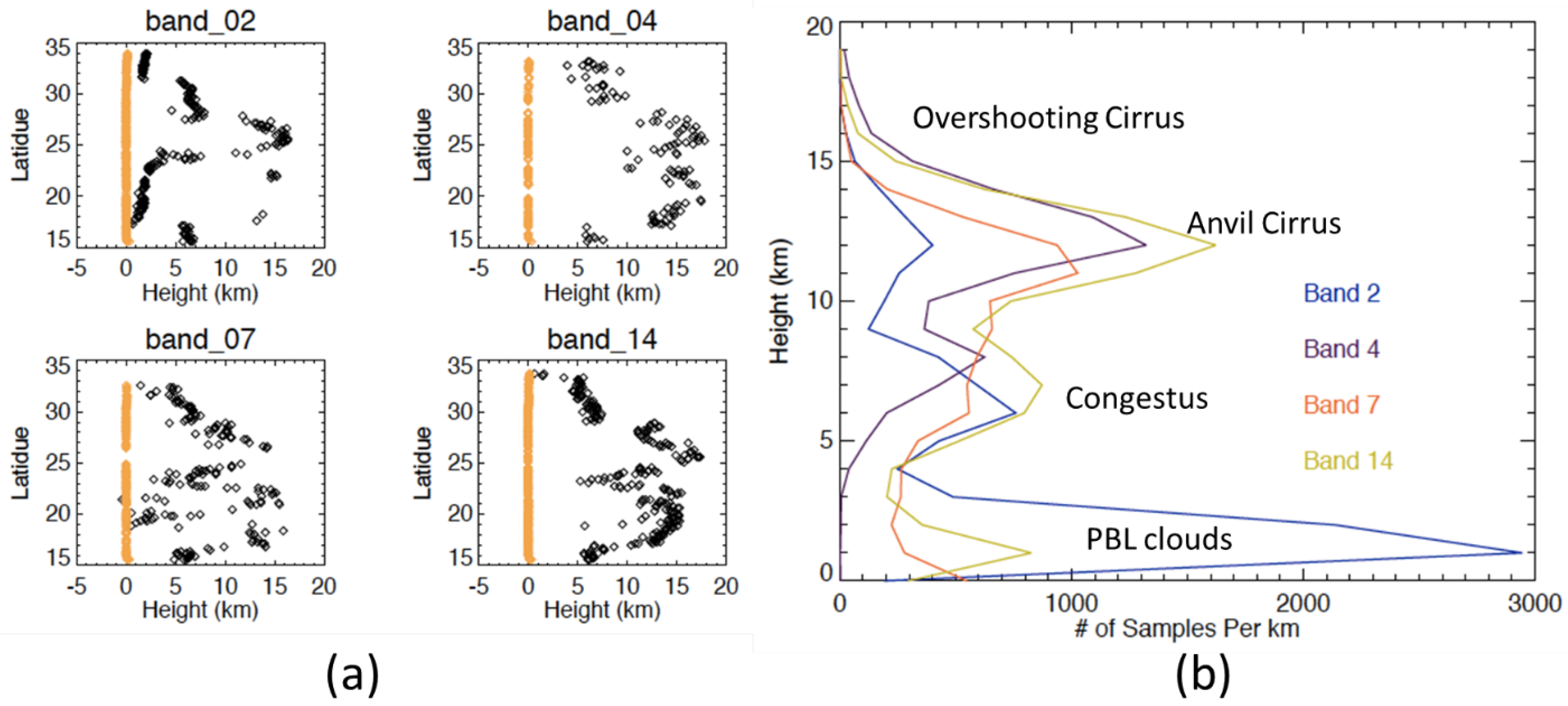
(a) Stereo height retrievals along 87.5° W longitude for the four spectral bands. The surface height is in orange. (b) Vertical distributions of the AMV stereo heights derived from the four spectral bands for the entire granule. All height retrievals are from chip size 32 × 32 km.
Figure 30.
(a) Stereo height retrievals along 87.5° W longitude for the four spectral bands. The surface height is in orange. (b) Vertical distributions of the AMV stereo heights derived from the four spectral bands for the entire granule. All height retrievals are from chip size 32 × 32 km.
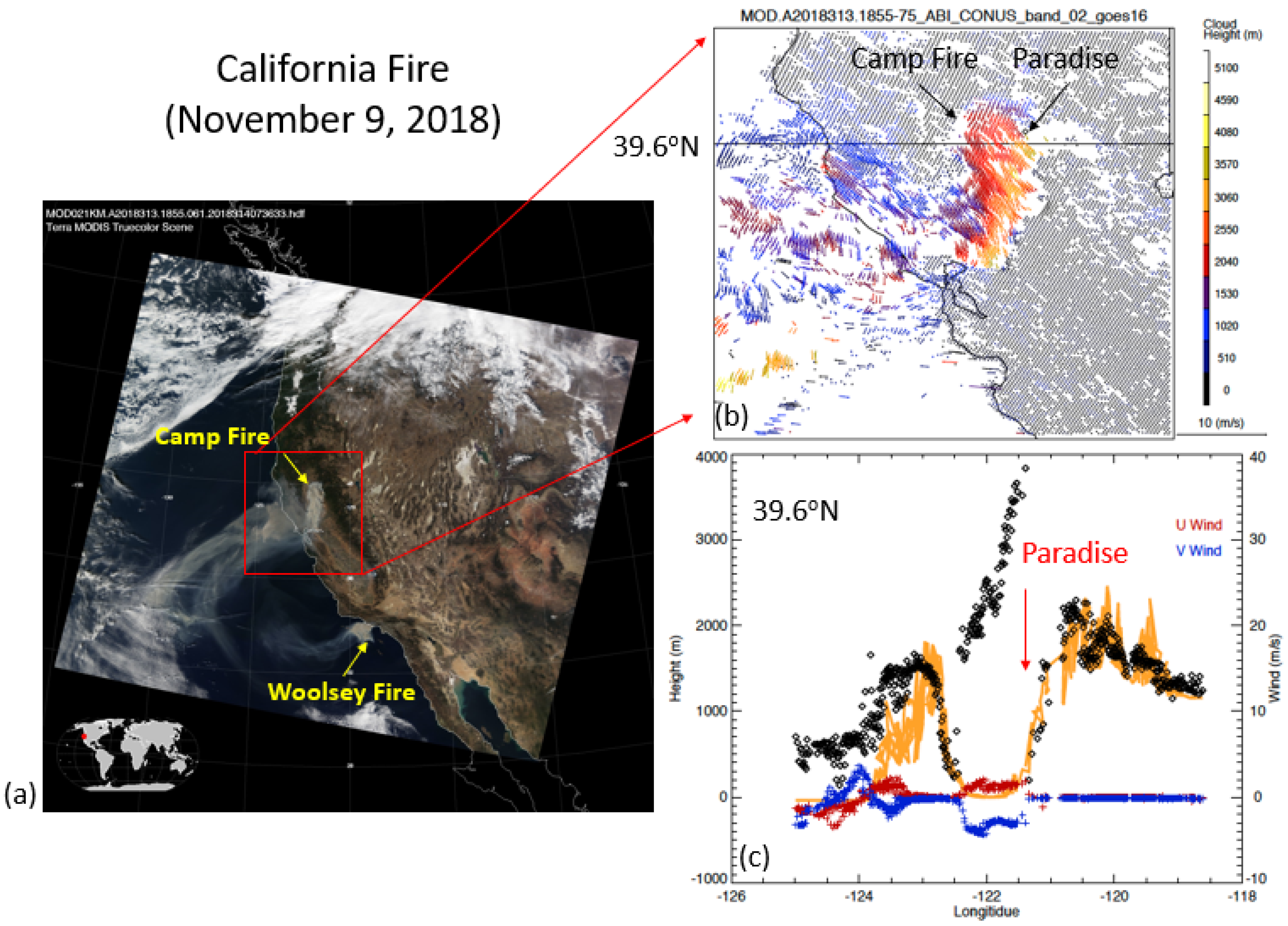
Figure 31.
(a) California camp fire and Woolsey fire as seen by Aqua/MODIS on November 9th. (b) The MODIS-GOES AMV and height retrievals over the northern California, and the cross-section (c) at a latitude of 39.6° N. The AMV vectors in the map are colored by their height above terrain. In the 39.6° N cross section, the terrain height is in orange whereas the 3D-wind stereo height is in black.
Figure 31.
(a) California camp fire and Woolsey fire as seen by Aqua/MODIS on November 9th. (b) The MODIS-GOES AMV and height retrievals over the northern California, and the cross-section (c) at a latitude of 39.6° N. The AMV vectors in the map are colored by their height above terrain. In the 39.6° N cross section, the terrain height is in orange whereas the 3D-wind stereo height is in black.
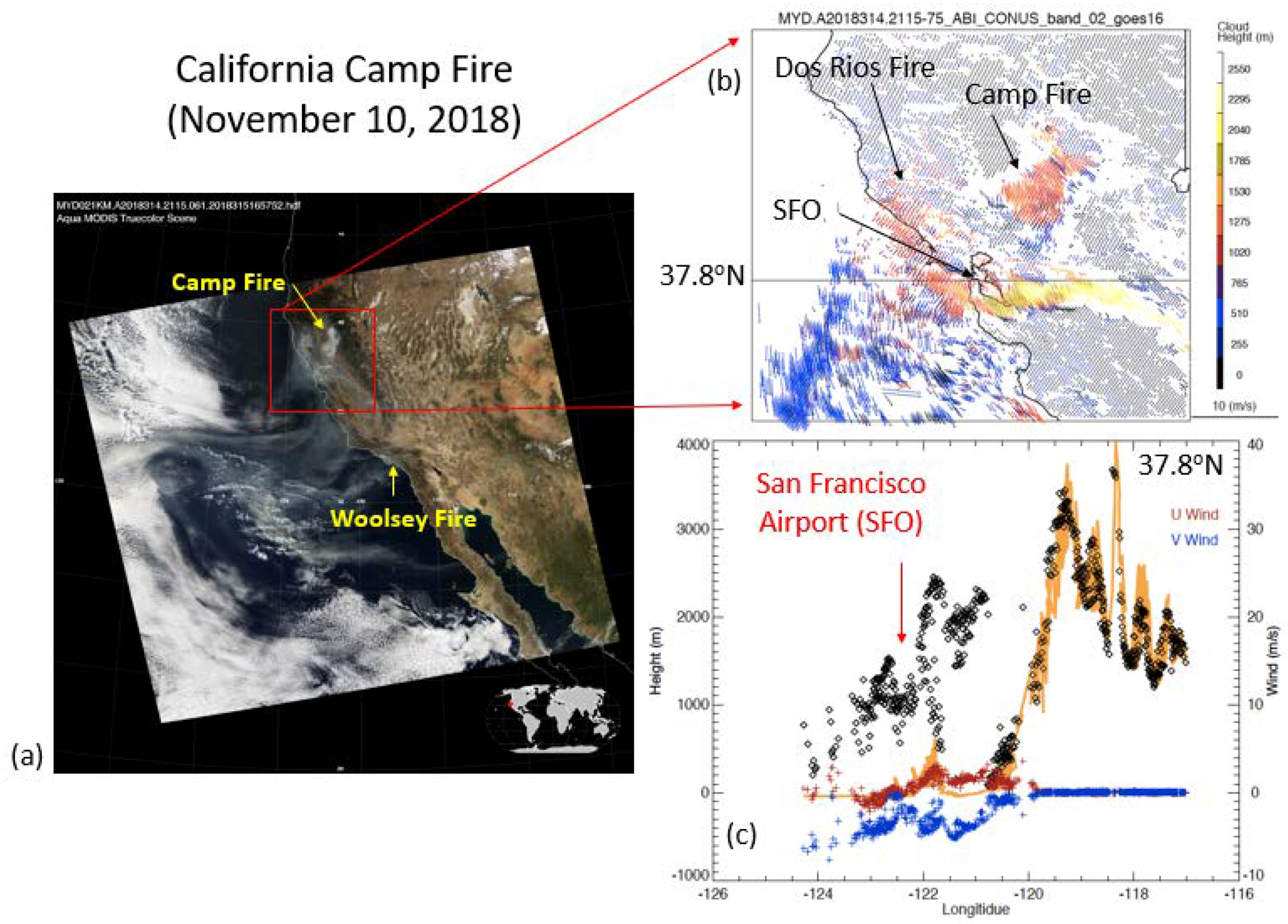
Figure 32.
California camp fire and Woolsey fires (
a) are shown as in
Figure 31 but for November 10th. The cross-section (
c) of the full set of retrievals (
b) is at the latitude of SFO (37.8° N).
Figure 32.
California camp fire and Woolsey fires (
a) are shown as in
Figure 31 but for November 10th. The cross-section (
c) of the full set of retrievals (
b) is at the latitude of SFO (37.8° N).
Table 1.
Moderate resolution imaging spectroradiometer (MODIS) offers many close spectral matches with the advanced baseline imager (ABI) channels.
Table 1.
Moderate resolution imaging spectroradiometer (MODIS) offers many close spectral matches with the advanced baseline imager (ABI) channels.
| ABI Band | Wavelength (μm) | Spatial Resolution (m) | MODIS Band | Wavelength (μm) | Spatial Resolution (m) |
|---|
| 1 | 0.45–0.49 | 1000 | 3 | 0.459–0.479 | 500 |
| 2 | 0.59–0.69 | 500 | 1 | 0.620–0.670 | 250 |
| 3 | 0.846–0.885 | 1000 | 2
16 | 0.841–0.876
0.862–0.877 | 250
1000 |
| 4 | 1.371–1.386 | 1000 | 26 | 1.360–1.390 | 1000 |
| 5 | 1.58–1.64 | 1000 | 6 | 1.628–1.652 | 500 |
| 6 | 2.225–2.275 | 2000 | 7 | 2.105–2.155 | 500 |
| 7 | 3.80–4.0 | 2000 | 21,22 | 3.929–3.989 | 1000 |
| 8 | 5.77–6.6 | 2000 | - | - | - |
| 9 | 6.75–7.15 | 2000 | 27 | 6.535–6.895 | 1000 |
| 10 | 7.24–7.44 | 2000 | 28 | 7.175–7.475 | 1000 |
| 11 | 8.3–8.7 | 2000 | 29 | 8.4–8.7 | 1000 |
| 12 | 9.42–9.8 | 2000 | 30 | 9.58–9.88 | 1000 |
| 13 | 10.1–10.6 | 2000 | - | - | - |
| 14 | 10.8–11.6 | 2000 | 31 | 10.780–11.280 | 1000 |
| 15 | 11.8–12.8 | 2000 | 32 | 11.770–12.270 | 1000 |
| 16 | 13.0–13.6 | 2000 | 33 | 13.185–13.485 | 1000 |
Table 2.
MODIS band-to-band registration (BBR) offsets in kilometers with respect to MODIS band 1 for 2017.
Table 2.
MODIS band-to-band registration (BBR) offsets in kilometers with respect to MODIS band 1 for 2017.
| MODIS Band | Aqua Along-Scan (km) | Aqua Along-Track (km) | Terra Along-Scan (km) | Terra Along-Track (km) |
|---|
| 2 | −0.0033 | −0.0075 | −0.0033 | −0.0083 |
| 3 | 0.0279 | −0.0184 | 0.0264 | 0.0226 |
| 6 | −0.2084 | 0.2725 | −0.0577 | −0.0562 |
| 7 | −0.2007 | 0.4058 | −0.0141 | −0.0409 |
| 22 | −0.2317 | 0.2186 | −0.0473 | −0.1131 |
| 26 | −0.2043 | 0.3278 | 0.0749 | −0.0643 |
| 27 | −0.1766 | 0.2928 | −0.1103 | 0.0038 |
| 28 | −0.1946 | 0.3136 | −0.0765 | 0.0163 |
| 29 | −0.2034 | 0.3253 | −0.0443 | 0.0267 |
| 30 | −0.2310 | 0.3466 | −0.0484 | 0.0506 |
| 31 | −0.2467 | 0.1923 | 0.0137 | −0.0406 |
| 32 | −0.1805 | 0.2103 | 0.1238 | −0.0425 |
| 33 | −0.2770 | 0.3527 | −0.0208 | 0.0432 |
Table 3.
ABI channels and the corresponding Landsat channels utilized for Navigation (NAV) measurements. The ABI non-window IR channels are excluded from the NAV measurements (and not included in this table) because they cannot see the ground and so cannot be compared with Landsat chips
Table 3.
ABI channels and the corresponding Landsat channels utilized for Navigation (NAV) measurements. The ABI non-window IR channels are excluded from the NAV measurements (and not included in this table) because they cannot see the ground and so cannot be compared with Landsat chips
| ABI Channel | ABI Wavelength (μm) | ABI Nadir Resolution (km) | Landsat 8 Band | Landsat 8 Wavelength (μm) | Landsat 8 Spatial Resolution (m) |
|---|
| 1 | 0.45–0.49 | 1 | 2 | 0.45–0.51 | 30 |
| 2 | 0.59–0.69 | 0.5 | 4 | 0.64–0.67 | 30 |
| 3 | 0.846–0.885 | 1 | 5 | 0.85–0.88 | 30 |
| 5 | 1.58–1.64 | 1 | 6 | 1.57–1.65 | 30 |
| 6 | 2.225–2.275 | 2 | 7 | 2.11–2.29 | 30 |
| 7 | 3.80–4.00 | 2 | 10 | 10.60–11.19 | 100 |
| 11 | 8.3–8.7 | 2 |
| 13 | 10.1–10.6 | 2 |
| 14 | 10.8–11.6 | 2 |
| 15 | 11.8–12.8 | 2 | 11 | 11.50–12.51 | 100 |
| 16 | 13.0–13.6 | 2 |
Table 4.
AMV Quality (i.e., consistency) for the hurricane Michael retrievals.
Table 4.
AMV Quality (i.e., consistency) for the hurricane Michael retrievals.
| Chip Size (km) | Band 2 | Band 4 | Band 7 | Band 14 |
|---|
| 8 × 8 | 93% | 22% | 21% | 22% |
| 16 × 16 | 97% | 95% | 92% | 95% |
| 32 × 32 | 99% | 99% | 99% | 99% |

 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}