Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel



Abstract
1. Introduction
2. Materials and Methods
2.1. Description of the Sentinel-2 and VENµS Dataset
2.2. BRDF Correction
2.3. Spatial Co-Registration and Cloud Masking
2.4. Transformation Models
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
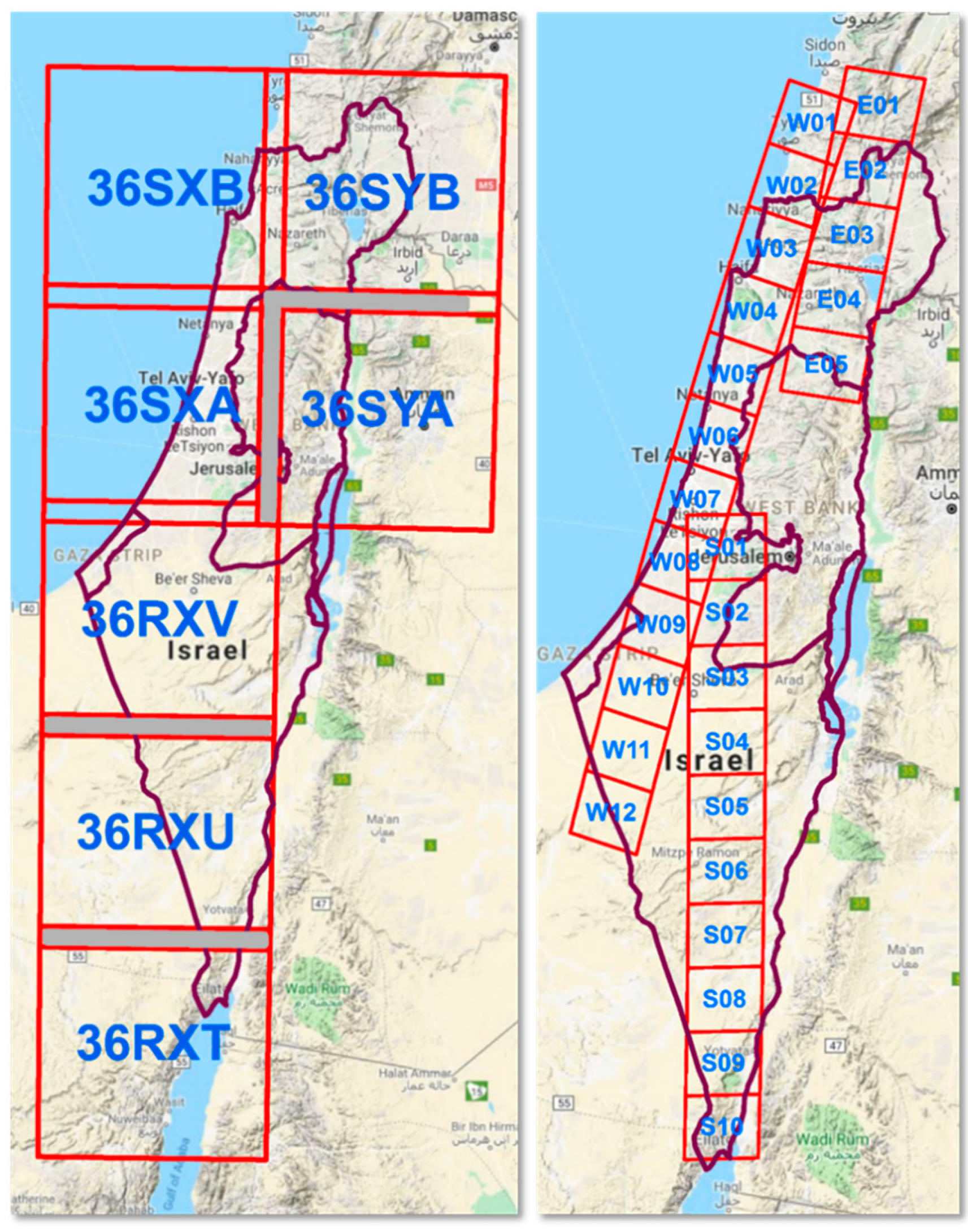
| Image Acquisition Date | VENµS Eastern Strip Tiles * | VENµS Image Western Strip Tiles * | |||||||||||||||
| E01 | E02 | E03 | E04 | E05 | W01 | W2 | W03 | W04 | W05 | W06 | W07 | W08 | W09 | W10 | W11 | W12 | |
| 16 April 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 15 June 2018 | Y | Y | Y | Y | |||||||||||||
| 25 June 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |
| 15 July 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |||
| 25 July 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |
| 04 August 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | ||||||
| 24 August 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 13 September 2018 | Y | Y | Y | Y | Y | Y | Y | ||||||||||
| 13 October 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |
| 12 November 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | ||
| 22 November 2018 | Y | Y | Y | Y | Y | Y | |||||||||||
| Image Acquisition Date | VENµS Image Southern Strip Tiles * | Sentinel-2 Image Tiles * | |||||||||||||||
| S01 | S02 | S03 | S04 | S05 | S06 | S07 | S08 | S09 | S10 | RXT | RXU | RXV | SXA | SXB | SYA | SYB | |
| 16 April 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 15 June 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 25 June 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 15 July 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 25 July 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 04 August 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 24 August 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| 13 September 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |
| 13 October 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |||||||
| 12 November 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | ||||||
| 22 November 2018 | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | |||||
References
- Helder, D.; Markham, B.; Morfitt, R.; Storey, J.; Barsi, J.; Gascon, F.; Clerc, S.; LaFrance, B.; Masek, J.; Roy, D.P.; et al. Observations and Recommendations for the Calibration of Landsat 8 OLI and Sentinel 2 MSI for Improved Data Interoperability. Remote Sens. 2018, 10, 1340. [Google Scholar] [CrossRef]
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar]
- Hansen, M.C.; Loveland, T.R. A review of large area monitoring of land cover change using Landsat data. Remote Sens. Environ. 2012, 122, 66–74. [Google Scholar] [CrossRef]
- Gómez, C.; White, J.C.; Wulder, M.A. Optical remotely sensed time series data for land cover classification: A review. ISPRS J. Photogramm. Remote Sens. 2016, 116, 55–72. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Roy, D.P.; White, J.C.; Hermosilla, T. Land cover 2.0. Int. J. Remote Sens. 2018, 39, 4254–4284. [Google Scholar] [CrossRef]
- Skakun, S.; Vermote, E.; Roger, J.C.; Franch, B. Combined Use of Landsat-8 and Sentinel-2A Images for Winter Crop Mapping and Winter Wheat Yield Assessment at Regional Scale. AIMS Geosci. 2017, 3, 163–186. [Google Scholar] [CrossRef] [PubMed]
- Whitcraft, A.K.; Becker-Reshef, I.; Justice, C.O. A Framework for Defining Spatially Explicit Earth Observation Requirements for a Global Agricultural Monitoring Initiative (GEOGLAM). Remote Sens. 2015, 7, 1461–1481. [Google Scholar] [CrossRef]
- Roy, D.P.; Yan, L. Robust Landsat-based crop time series modelling. Remote Sens. Environ. (In press). [CrossRef]
- Melaas, E.K.; Friedl, M.A.; Zhu, Z. Detecting interannual variation in deciduous broadleaf forest phenology using Landsat TM/ETM+ data. Remote Sens. Environ. 2013, 132, 176–185. [Google Scholar] [CrossRef]
- Hermosilla, T.; Wulder, M.A.; White, J.C.; Coops, N.C.; Hobart, G.W.; Campbell, L.B. Mass data processing of time series Landsat imagery: Pixels to data products for forest monitoring. Int. J. Digit. Earth 2016, 9, 1035–1054. [Google Scholar] [CrossRef]
- Loveland, T.R.; Dwyer, J.L. Landsat: Building a strong future. Remote Sens. Environ. 2012, 122, 22–29. [Google Scholar] [CrossRef]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Shelestov, A.; Lavreniuk, M.; Kussul, N.; Novikov, A.; Skakun, S. Exploring Google Earth Engine Platform for Big Data Processing: Classification of Multi-Temporal Satellite Imagery for Crop Mapping. Front. Earth Sci. 2017, 5, 17. [Google Scholar] [CrossRef]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- Flood, N. Continuity of Reflectance Data between Landsat-7 ETM+ and Landsat-8 OLI, for Both Top-of-Atmosphere and Surface Reflectance: A Study in the Australian Landscape. Remote Sens. 2014, 6, 7952–7970. [Google Scholar] [CrossRef]
- Flood, N. Comparing Sentinel-2A and Landsat 7 and 8 using surface reflectance over Australia. Remote Sens. 2017, 9, 659. [Google Scholar] [CrossRef]
- Zhang, H.K.; Roy, D.P.; Yan, L.; Li, Z.; Huang, H.; Vermote, E.; Skakun, S.; Roger, J.C. Characterization of Sentinel-2A and Landsat-8 top of atmosphere, surface, and nadir BRDF adjusted reflectance and NDVI differences. Remote Sens. Environ. 2018, 215, 482–494. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.K.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.B.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, Z.; Zhang, H.K. Adjustment of Sentinel-2 Multi-Spectral Instrument (MSI) Red-Edge Band Reflectance to Nadir BRDF Adjusted Reflectance (NBAR) and Quantification of Red-Edge Band BRDF Effects. Remote Sens. 2017, 9, 1325. [Google Scholar]
- Li, P.; Jiang, L.; Feng, Z. Cross-Comparison of Vegetation Indices Derived from Landsat-7 Enhanced Thematic Mapper Plus (ETM+) and Landsat-8 Operational Land Imager (OLI) Sensors. Remote Sens. 2014, 6, 310–329. [Google Scholar] [CrossRef]
- Arekhi, M.; Goksel, C.; Sanli, F.B.; Senel, G. Comparative Evaluation of the Spectral and Spatial Consistency of Sentinel-2 and Landsat-8 OLI Data for Igneada Longos Forest. ISPRS Int. J. Geo Inf. 2019, 8, 56. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- Mandanici, E.; Bitelli, G. Preliminary Comparison of Sentinel-2 and Landsat 8 Imagery for a Combined Use. Remote Sens. 2016, 8, 1014. [Google Scholar] [CrossRef]
- Dedieu, G.; Karnieli, A.; Hagolle, O.; Jeanjean, H.; Cabot, F.; Ferrier, P.; Yaniv, Y. VENµS: A Joint French Israeli Earth Observation Scientific Mission with High Spatial and Temporal Resolution Capabilities. In Proceedings of the 2nd International Symposium on Recent Advances in Qualitative Remote Sensing, Torrent, Spain, 25–29 September2006; pp. 517–521. [Google Scholar]
- Herscovitz, J.; Karnieli, A. VENµS program: Broad and New Horizons for Super-Spectral Imaging and Electric Propulsion Missions for a Small Satellite. In Proceedings of the AIAA/USU Conference on Small Satellites, Coming Attractions, SSC08-III-1, Logan, CO, USA, 10–13 August 2008. [Google Scholar]
- Herrmann, I.; Pimstein, A.; Karnieli, A.; Cohen, Y.; Alchanatis, V.; Bonfil, D.J. LAI assessment of wheat and potato crops by VENμS and Sentinel-2 bands. Remote Sens. Environ. 2011, 115, 2141–2151. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A multi-temporal method for cloud detection, applied to FORMOSAT-2, VENμS, LANDSAT and SENTINEL-2 images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef]
- Drusch, M.; Del Bello, U.; Carlier, S.; Colin, O.; Fernandez, V.; Gascon, F.; Hoersch, B.; Isola, C.; Laberinti, P.; Martimort, P.; et al. Sentinel-2: ESA’s Optical High-Resolution Mission for GMES Operational Services. Remote Sens. Environ. 2012, 120, 25–36. [Google Scholar] [CrossRef]
- Roujean, J.L.; Leroy, M.; Deschamps, P.Y. A Bidirectional Reflectance Model of the Earth’s Surface for the Correction of Remote Sensing Data. J. Geophys. Res. 1992, 97, 20455–20468. [Google Scholar] [CrossRef]
- Claverie, M.; Vermote, E.; Franch, B.; He, T.; Hagolle, O.; Kadiri, M.; Masek, J. Evaluation of Medium Spatial Resolution BRDF-Adjustment Techniques Using Multi-Angular SPOT4 (Take5) Acquisitions. Remote Sens. 2015, 7, 12057–12075. [Google Scholar] [CrossRef]
- Strahler, A.H.; Lucht, W.; Schaaf, C.B.; Tsang, T.; Gao, F.; Li, X.; Muller, J.-P.; Lewis, P.; Barnsley, M.J. MODIS BRDF Albedo Product: Algorithm Theoretical Basis Document Version 5.0. MODIS Doc. 1999, 23, 42–47. [Google Scholar]
- Cook, R.D. Detection of Influential Observation in Linear Regression. Technometrics 1977, 19, 15–18. [Google Scholar]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.W.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The Spectral Image Processing System (SIPS)—Interactive Visualization and Analysis of Imaging Spectrometer Data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Li, S.; Ganguly, S.; Dungan, J.L.; Wang, W.; Nemani, R.R. Sentinel-2 MSI Radiometric Characterization and Cross-Calibration with Landsat-8 OLI. Adv. Remote Sens. 2017, 06, 147–159. [Google Scholar] [CrossRef]
- Rozenstein, O.; Haymann, N.; Kaplan, G.; Tanny, J. Estimating cotton water consumption using a time series of Sentinel-2 imagery. Agric. Water Manag. 2018, 207, 44–52. [Google Scholar] [CrossRef]









| VENμS | Sentinel-2 | ||||||
|---|---|---|---|---|---|---|---|
| Central Wavelength (nm) | Band Width (nm) | Spatial Resolution (m) | Central Wavelength (nm) | Band Width (nm) | Spatial Resolution (m) | ||
| Band 3 (Blue) | 492 | 40 | 10 | Band 2 (Blue) | 490 | 65 | 10 |
| Band (Green) | 555 | 40 | 10 | Band 3 (Green) | 560 | 35 | 10 |
| Band 7 (Red) | 666 | 40 | 10 | Band 4 (Red) | 665 | 30 | 10 |
| Band 8 (Red-edge-1) | 702 | 40 | 10 | Band 5 (Red-edge-1) | 705 | 15 | 20 |
| Band 9 (Red-edge-2) | 741 | 40 | 10 | Band 6 (Red-edge-2) | 740 | 15 | 20 |
| Band 10 (Red-edge-3) | 782 | 30 | 10 | Band 7 (Red-edge-3) | 783 | 20 | 20 |
| Band 11 (NIR) | 861 | 16 | 10 | Band 8 (Broad NIR) | 842 | 115 | 10 |
| Band 8A (Narrow NIR) | 865 | 20 | 20 | ||||
| Bands | Reference | |||
|---|---|---|---|---|
| Blue | 0.0774 | 0.0079 | 0.0372 | [20] |
| Green | 0.1306 | 0.0178 | 0.058 | |
| Red | 0.169 | 0.0227 | 0.0574 | |
| NIR | 0.3093 | 0.033 | 0.1535 | |
| Red-edge 1 | 0.2085 | 0.0256 | 0.0845 | [22] |
| Red-edge 2 | 0.2316 | 0.0273 | 0.1003 | |
| Red-edge 3 | 0.2599 | 0.0294 | 0.1197 |
| 10 m | 20 m | |||
|---|---|---|---|---|
| Number of Tie-Points Per Image Pair | RMSE | Number of Tie-Points Per Image Pair | RMSE | |
| Minimum * | 15 | 0.14 | 7 | 0.07 |
| Maximum | 454 | 0.49 | 182 | 0.43 |
| Average | 150 | 0.27 | 40 | 0.17 |
| Training Pixels | Validation Pixels | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Bands | Training Points (Outlier Excluded) | Outliers | Vegetation Pixels | Non-Vegetation Pixels | Validation Points (Outlier Excluded) | Outliers | Vegetation Pixels | Non-Vegetation Pixels | |
| 10 m | Blue (490 nm) | 704,853 | 28,709 (3.9%) | 251,523 | 453,330 | 78,599 | 10,599 (11.9%) | 30,954 | 47,645 |
| Green (560 nm) | 707,191 | 26,371 (3.6%) | 254,378 | 452,813 | 79,270 | 9,928 (11.1%) | 32,365 | 46,905 | |
| Red (665 nm) | 691,747 | 41,815 (5.7%) | 246,404 | 445,343 | 77,564 | 11,634 (13%) | 31,708 | 45,856 | |
| NIR (842 nm) | 707,058 | 26,504 (3.6%) | 247,627 | 459,431 | 73,135 | 16,063 (18%) | 28,044 | 45,091 | |
| 20 m | Red-edge 1 (705 nm) | 698,320 | 35,242 (4.8%) | 252,604 | 445,716 | 77,093 | 12,105 (13.6%) | 31,916 | 45,177 |
| Red-edge 2 (740 nm) | 703,819 | 29,743 (4.1%) | 250,359 | 453,460 | 75,072 | 14,126 (15.8%) | 30,116 | 44,956 | |
| Red-edge 3 (783 nm) | 704,302 | 29,260 (4%) | 247,121 | 457,181 | 73,681 | 15,517 (17.4%) | 28,299 | 45,382 | |
| NIR (865 nm) | 706,113 | 27,449 (3.7%) | 247,107 | 459,006 | 72,597 | 16,601 (18.6%) | 27,734 | 44,863 | |
| Bands (Central Wavelength) | Slope | ME for Slope * | Intercept | ME for Intercept * | |
|---|---|---|---|---|---|
| 10 m | Blue (490 nm) | 1.0307 | 0.0010 | 0.0194 | 0.0001 |
| Green (560 nm) | 1.0035 | 0.0009 | 0.0271 | 0.0002 | |
| Red (665 nm) | 0.9588 | 0.0007 | 0.0287 | 0.0002 | |
| NIR (842 nm) | 0.8082 | 0.0013 | 0.0768 | 0.0005 | |
| 20m | Red-edge 1 (705 nm) | 0.9589 | 0.0009 | 0.0481 | 0.0002 |
| Red-edge 2 (740 nm) | 0.8632 | 0.0012 | 0.0648 | 0.0004 | |
| Red-edge 3 (783 nm) | 0.8347 | 0.0013 | 0.0796 | 0.0004 | |
| NIR (865 nm) | 0.7841 | 0.0013 | 0.0980 | 0.0005 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manivasagam, V.S.; Kaplan, G.; Rozenstein, O. Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel. Remote Sens. 2019, 11, 1710. https://doi.org/10.3390/rs11141710
Manivasagam VS, Kaplan G, Rozenstein O. Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel. Remote Sensing. 2019; 11(14):1710. https://doi.org/10.3390/rs11141710
Chicago/Turabian StyleManivasagam, V.S., Gregoriy Kaplan, and Offer Rozenstein. 2019. "Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel" Remote Sensing 11, no. 14: 1710. https://doi.org/10.3390/rs11141710
APA StyleManivasagam, V. S., Kaplan, G., & Rozenstein, O. (2019). Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel. Remote Sensing, 11(14), 1710. https://doi.org/10.3390/rs11141710