Global Earthquake Response with Imaging Geodesy: Recent Examples from the USGS NEIC


Abstract
1. Introduction
2. Background: Geodesy and Operational Earthquake Response at the NEIC
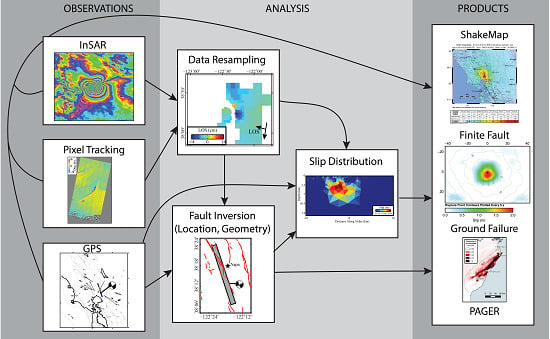
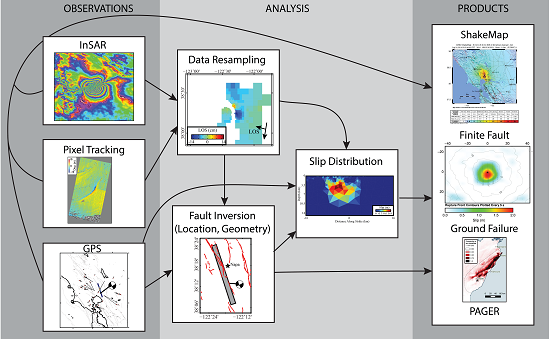
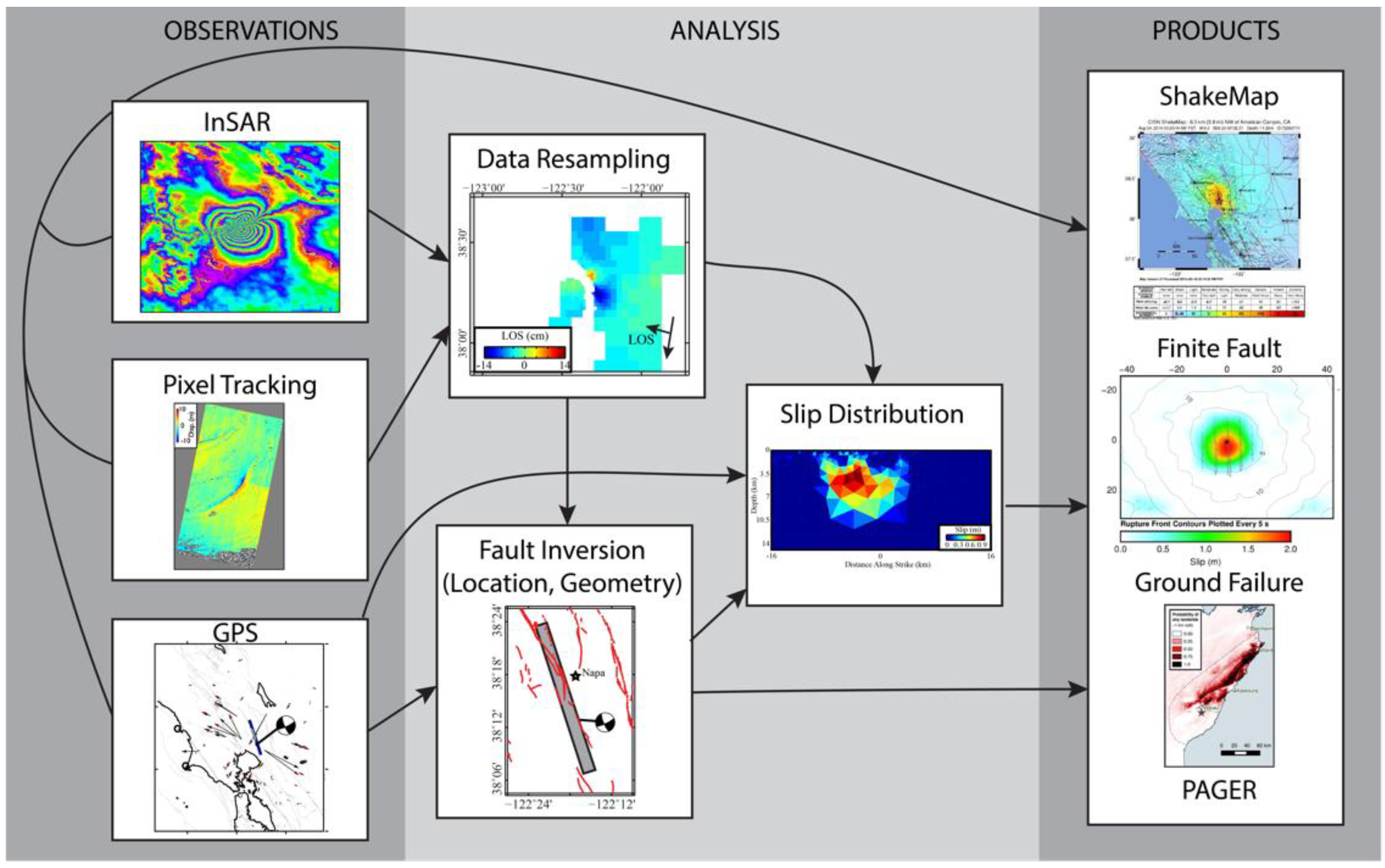
3. Geodetic Response Workflow: Under the Hood
4. Case Studies
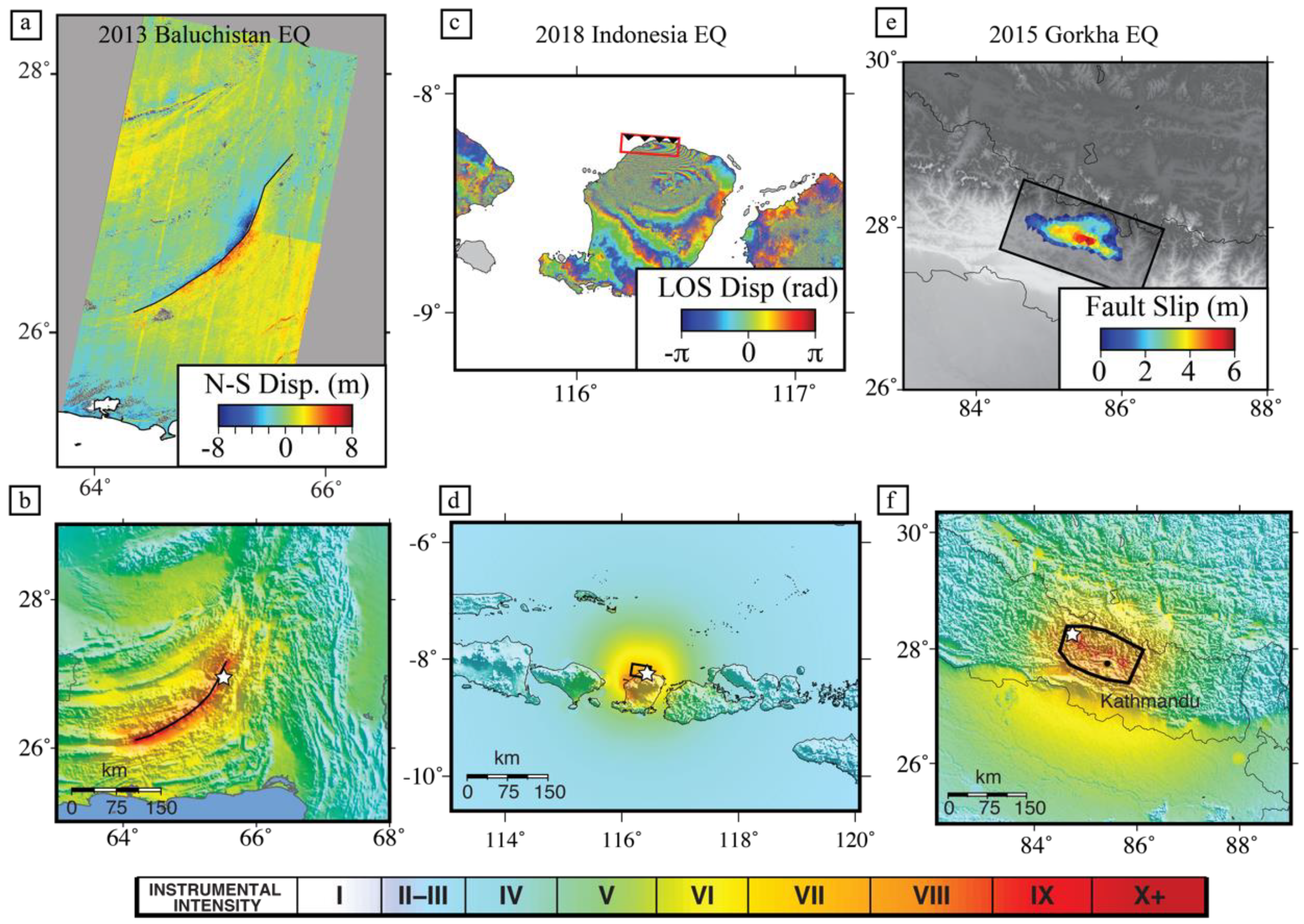
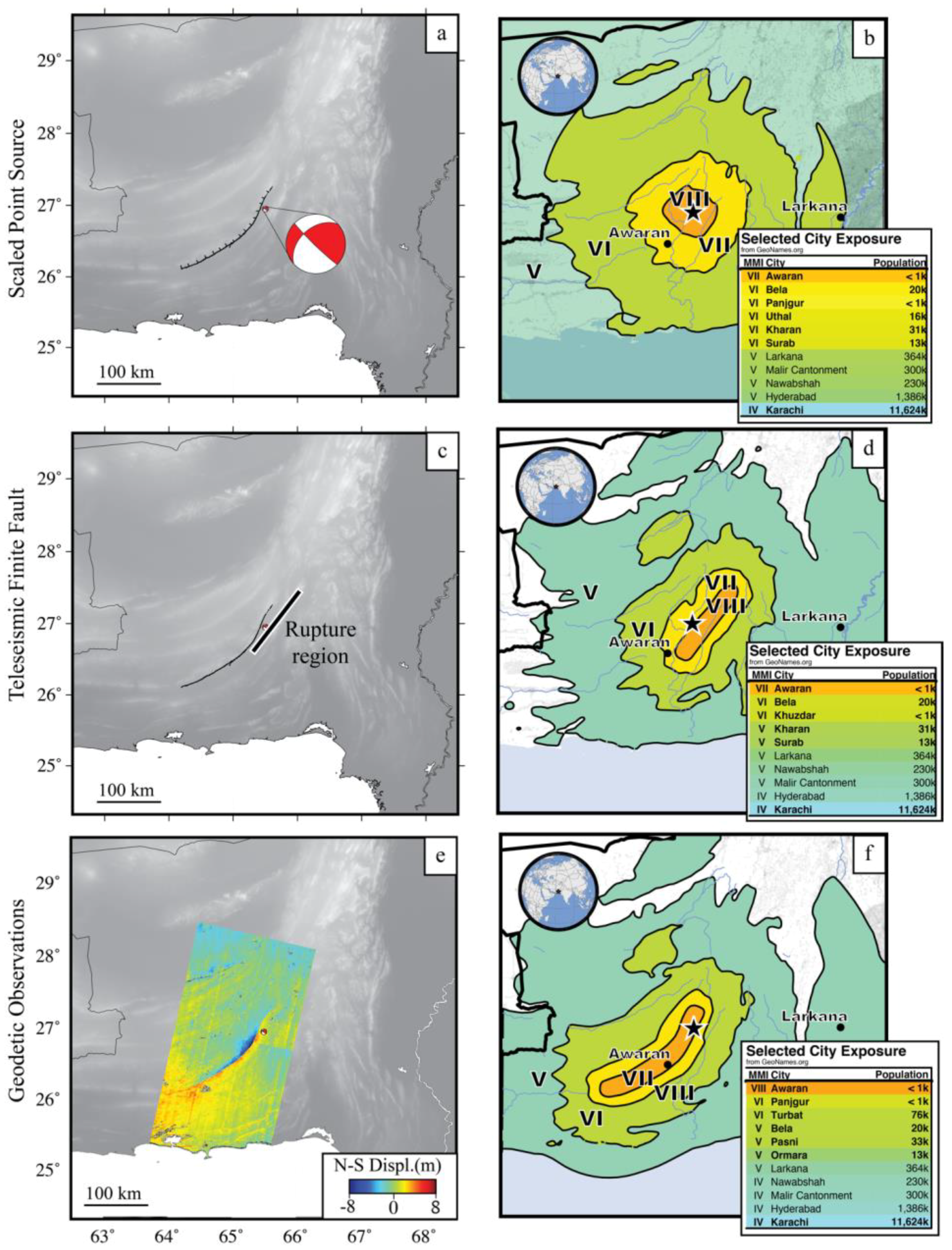
4.1. The 2013 Mw7.7 Baluchistan, Pakistan Earthquake
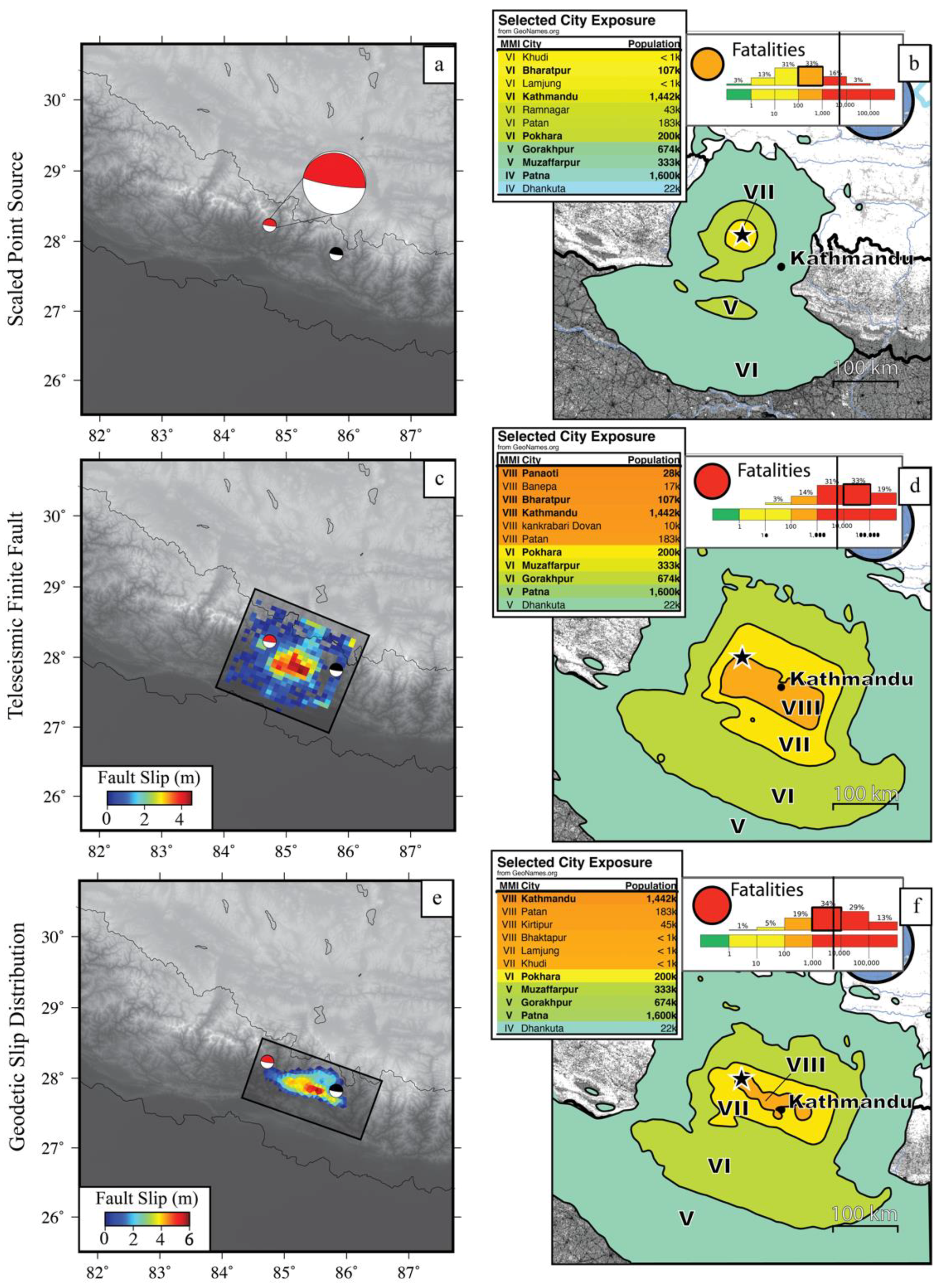
4.2. The 2015 Mw7.8 Gorkha, Nepal Earthquake
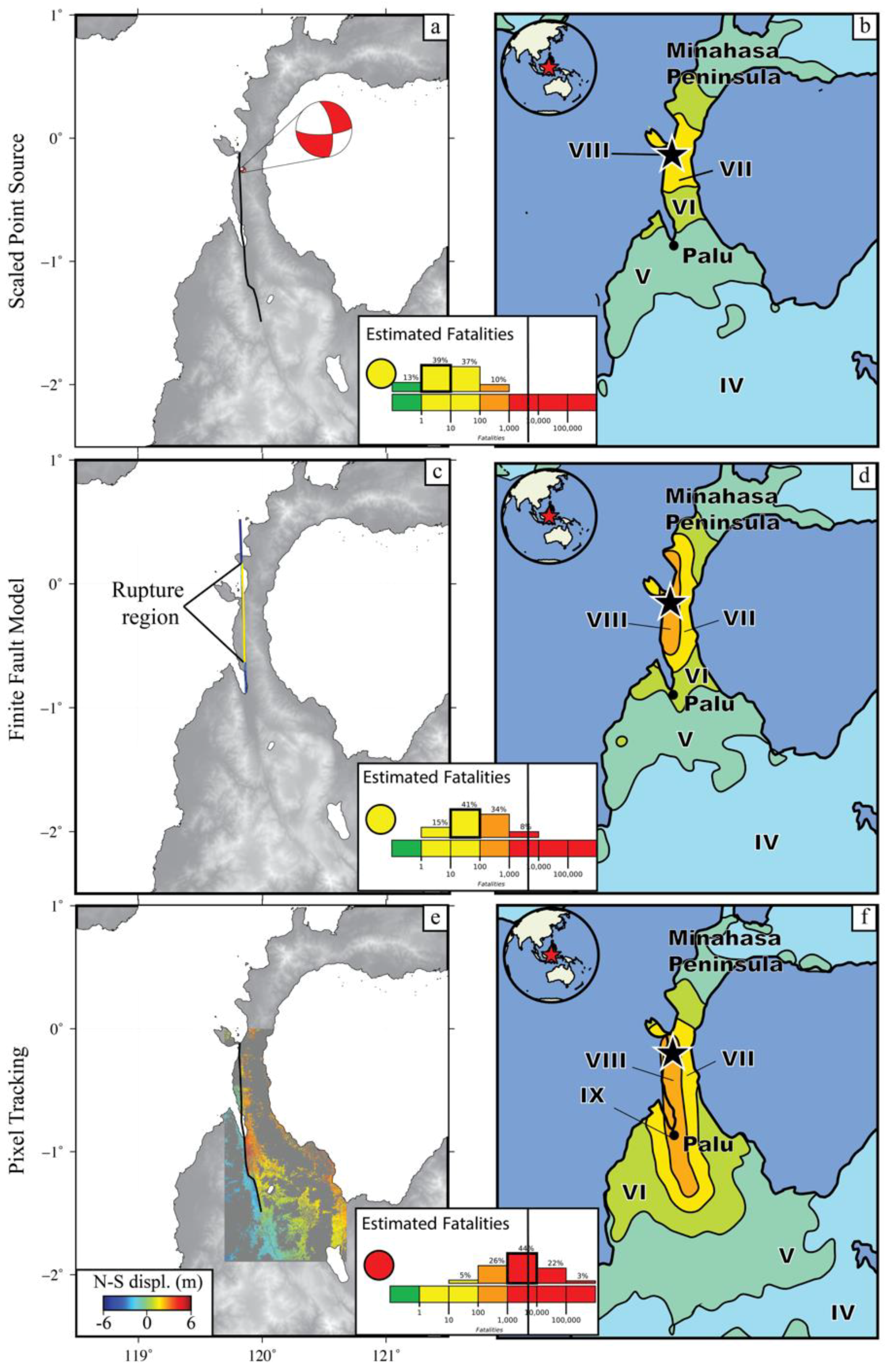
4.3. The 2018 Mw7.5 Palu, Indonesia Earthquake
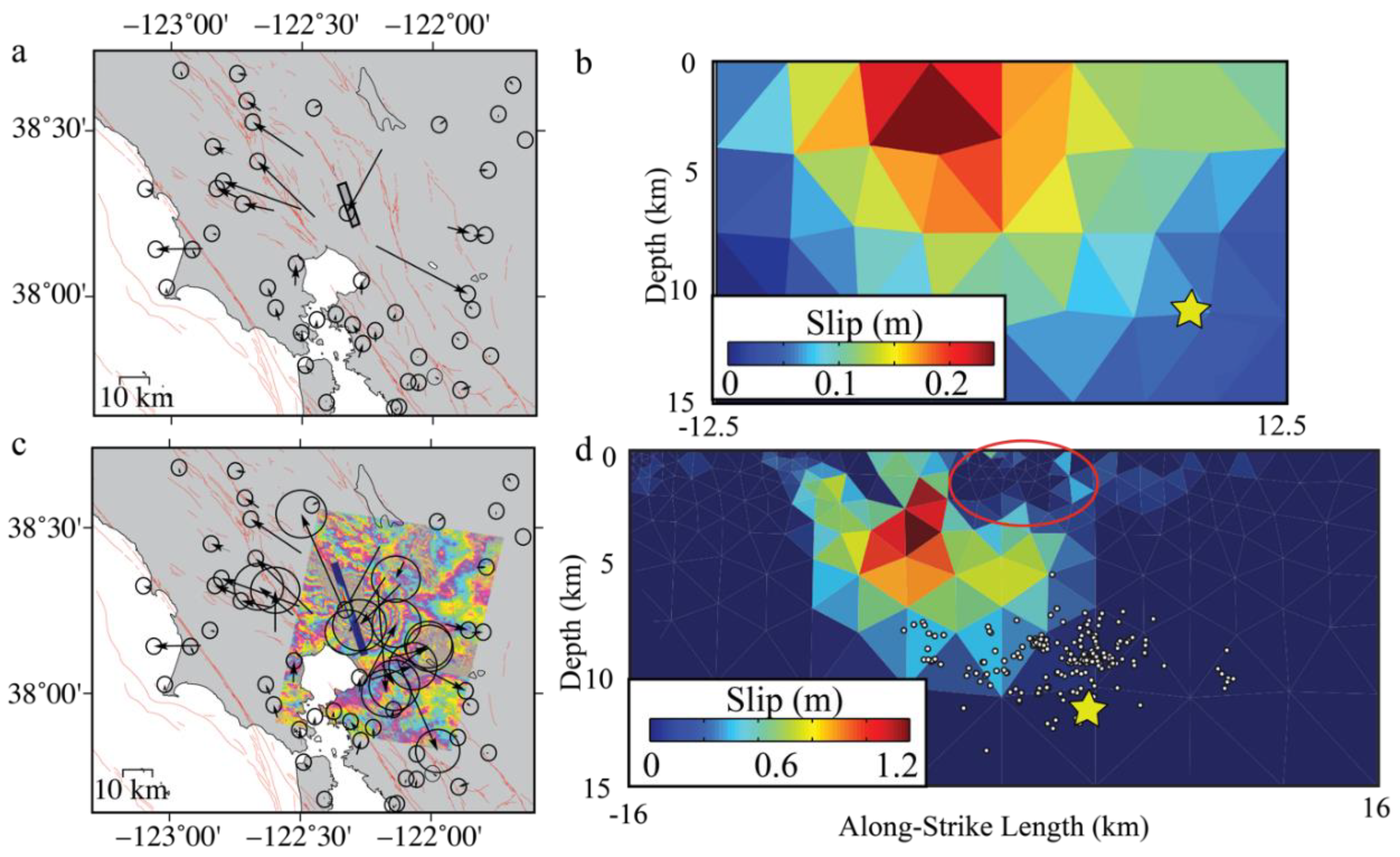
4.4. The 2014 Mw6.0 South Napa, California Earthquake
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hayes, G.P. Rapid source characterization of the 2011 Mw 9.0 off the Pacific coast of Tohoku Earthquake. Earth Planets Space 2011, 63, 529–534. [Google Scholar] [CrossRef]
- Wald, D.J.; Jaiswal, K.S.; Marano, K.D.; Bausch, D. Earthquake Impact Scale. Nat. Hazards Rev. 2011, 12, 125–139. [Google Scholar] [CrossRef]
- Wald, D.J.; Quitoriano, V.; Heaton, T.H.; Kanamori, H.; Scrivner, C.W.; Worden, C.B. TriNet “ShakeMaps”: Rapid Generation of Peak Ground Motion and Intensity Maps for Earthquakes in Southern California. Earthq. Spectra 1999, 15, 537–555. [Google Scholar] [CrossRef]
- Wald, D.J.; Jaiswal, K.S.; Marano, K.D.; Bausch, D.B.; Hearne, M.G. PAGER—Rapid Assessment of an Earthquake’s Impact; USGS Fact Sheet; U.S. Geological Survey: Reston, VA, USA, 2010.
- Allstadt, K.E.; Thompson, E.M.; Hearne, M.; Jessee, M.A.N.; Zhu, J.; Wald, D.J.; Tanyas, H. Integrating landslide and liquefaction hazard and loss estimates with existing USGS real-time earthquake information products. In Proceedings of the 16th World Conference on Earthquake Engineering, Santiago, Chile, 9–13 January 2017. [Google Scholar]
- van der Elst, N.J.; Page, M.T. Nonparametric Aftershock Forecasts Based on Similar Sequences in the Past. Seismol. Res. Lett. 2018, 89, 145–152. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Murray, J.R.; Yun, S.-H.; Svarc, J.L.; Samsonov, S.V.; Fielding, E.J.; Brooks, B.A.; Milillo, P. Geodetic Constraints on the 2014 M 6.0 South Napa Earthquake. Seismol. Res. Lett. 2015, 86, 335–343. [Google Scholar] [CrossRef]
- Brocher, T.M.; Baltay, A.S.; Hardebeck, J.L.; Pollitz, F.F.; Murray, J.R.; Llenos, A.L.; Schwartz, D.P.; Blair, J.L.; Ponti, D.J.; Lienkaemper, J.J.; et al. The M6. 0 24 August 2014 South Napa Earthquake. Seismol. Res. Lett. 2015, 86, 309–326. [Google Scholar]
- Elliott, J.R.; Walters, R.J.; Wright, T.J. The role of space-based observation in understanding and responding to active tectonics and earthquakes. Nat. Commun. 2016, 7, 13844. [Google Scholar] [CrossRef] [PubMed]
- Funning, G.J.; Garcia, A. A systematic study of earthquake detectability using Sentinel-1 Interferometric Wide-Swath data. Geophys. J. Int. 2019, 216, 332–349. [Google Scholar] [CrossRef]
- Hayes, G.P.; Briggs, R.W.; Barnhart, W.D.; Yeck, W.L.; McNamara, D.E.; Wald, D.J.; Nealy, J.L.; Benz, H.M.; Gold, R.D.; Jaiswal, K.S.; et al. Rapid Characterization of the 2015 Mw 7.8 Gorkha, Nepal, Earthquake Sequence and Its Seismotectonic Context. Seismol. Res. Lett. 2015, 86, 1557–1567. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Hayes, G.P.; Samsonov, S.V.; Fielding, E.J.; Seidman, L.E. Breaking the oceanic lithosphere of a subducting slab: The 2013 Khash, Iran earthquake. Geophys. Res. Lett. 2014, 41, 32–36. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Hayes, G.P.; Briggs, R.W.; Gold, R.D.; Bilham, R. Ball-and-socket tectonic rotation during the 2013 Balochistan earthquake. Earth Planet. Sci. Lett. 2014, 403, 210–216. [Google Scholar] [CrossRef]
- Hayes, G.P.; Herman, M.W.; Barnhart, W.D.; Furlong, K.P.; Riquelme, S.; Benz, H.M.; Bergman, E.; Barrientos, S.; Earle, P.S.; Samsonov, S. Continuing megathrust earthquake potential in Chile after the 2014 Iquique earthquake. Nature 2014, 512, 295–299. [Google Scholar] [CrossRef] [PubMed]
- McNamara, D.E.; Yeck, W.L.; Barnhart, W.D.; Schulte-Pelkum, V.; Bergman, E.; Adhikari, L.B.; Dixit, A.; Hough, S.E.; Benz, H.M.; Earle, P.S. Source modeling of the 2015 Mw 7.8 Nepal (Gorkha) earthquake sequence: Implications for geodynamics and earthquake hazards. Tectonophysics 2017, 714–715, 21–30. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Murray, J.R.; Briggs, R.W.; Gomez, F.; Miles, C.P.J.; Svarc, J.; Riquelme, S.; Stressler, B.J. Coseismic slip and early afterslip of the 2015 Illapel, Chile, earthquake: Implications for frictional heterogeneity and coastal uplift. J. Geophys. Res. Solid Earth 2016, 121, 6172–6191. [Google Scholar] [CrossRef]
- Herman, M.W.; Nealy, J.L.; Yeck, W.L.; Barnhart, W.D.; Hayes, G.P.; Furlong, K.P.; Benz, H.M. Integrated geophysical characteristics of the 2015 Illapel, Chile, earthquake. J. Geophys. Res. Solid Earth 2017, 122, 4691–4711. [Google Scholar] [CrossRef]
- Yeck, W.L.; Hayes, G.P.; McNamara, D.E.; Rubinstein, J.L.; Barnhart, W.D.; Earle, P.S.; Benz, H.M. Oklahoma experiences largest earthquake during ongoing regional wastewater injection hazard mitigation efforts. Geophys. Res. Lett. 2017, 44, 711–717. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Yeck, W.L.; McNamara, D.E. Induced earthquake and liquefaction hazards in Oklahoma, USA: Constraints from InSAR. Remote Sens. Environ. 2018, 218, 1–12. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Brengman, C.M.J.; Li, S.; Peterson, K.E. Ramp-flat basement structures of the Zagros Mountains inferred from co-seismic slip and afterslip of the 2017 Mw7.3 Darbandikhan, Iran/Iraq earthquake. Earth Planet. Sci. Lett. 2018, 496, 96–107. [Google Scholar] [CrossRef]
- Nissen, E.; Ghods, A.; Karasözen, E.; Elliott, J.R.; Barnhart, W.D.; Bergman, E.A.; Hayes, G.P.; Jamal-Reyhani, M.; Nemati, M.; Tan, F.; et al. The 12 November 2017 Mw 7.3 Ezgeleh-Sarpolzahab (Iran) Earthquake and Active Tectonics of the Lurestan Arc. J. Geophys. Res. Solid Earth 2019, 124, 2124–2152. [Google Scholar] [CrossRef]
- Guy, M.R.; Patton, J.M.; Fee, J.; Hearne, M.; Martinez, E.; Ketchum, D.; Worden, C.; Quitoriano, V.; Hunter, E.; Smoczyk, G.; et al. National Earthquake Information Center Systems Overview and Integration; Open-File Report; U.S. Geological Survey: Reston, VA, USA, 2015; p. 28.
- Hayes, G.P. The finite, kinematic rupture properties of great-sized earthquakes since 1990. Earth Planet. Sci. Lett. 2017, 468, 94–100. [Google Scholar] [CrossRef]
- Wald, D.J.; Franco, G. Financial Decision-Making Based on Near–Real-Time Earthquake Information. In Proceedings of the 16th World Conference on Earthquake Engineering, Santiago, Chile, 9–13 January 2017. [Google Scholar]
- Worden, C.B.; Wald, D.J. Shakemap Manual Online: Technical Manual, User’s Guide, and Software Guide; U.S. Geological Survey: Reston, VA, USA, 2016.
- Wald, D.J.; Allen, T.I. Topographic Slope as a Proxy for Seismic Site Conditions and Amplification. Bull. Seismol. Soc. Am. 2007, 97, 1379–1395. [Google Scholar] [CrossRef]
- Worden, C.B.; Gerstenberger, M.C.; Rhoades, D.A.; Wald, D.J. Probabilistic Relationships between Ground-Motion Parameters and Modified Mercalli Intensity in California. Bull. Seismol. Soc. Am. 2012, 102, 204–221. [Google Scholar] [CrossRef]
- Thompson, E.M.; Worden, C.B. Estimating Rupture Distances without a RuptureEstimating Rupture Distances without a Rupture. Bull. Seismol. Soc. Am. 2018, 108, 371–379. [Google Scholar] [CrossRef]
- Avouac, J.-P.; Ayoub, F.; Leprince, S.; Konca, O.; Helmberger, D.V. The 2005, Mw 7.6 Kashmir earthquake: Sub-pixel correlation of ASTER images and seismic waveforms analysis. Earth Planet. Sci. Lett. 2006, 249, 514–528. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M.; Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 MW7.1 Hector Mine Earthquake, California, from space geodetic observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef]
- Funning, G.J.; Parsons, B.; Wright, T.J.; Jackson, J.A.; Fielding, E.J. Surface displacements and source parameters of the 2003 Bam (Iran) earthquake from Envisat advanced synthetic aperture radar imagery. J. Geophys. Res. Solid Earth 2005, 110, 1–23. [Google Scholar] [CrossRef]
- Hamling, I.J.; Hreinsdóttir, S.; Clark, K.; Elliott, J.; Liang, C.; Fielding, E.; Litchfield, N.; Villamor, P.; Wallace, L.; Wright, T.J.; et al. Complex multifault rupture during the 2016 Mw 7.8 Kaikōura earthquake, New Zealand. Science 2017, 356, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Massonnet, D.; Rossi, M.; Carmona, C.; Adragna, F.; Peltzer, G.; Feigl, K.; Rabaute, T. The displacement field of the Landers earthquake mapped by radar interferometry. Nature 1993, 364, 138–142. [Google Scholar] [CrossRef]
- Avouac, J.-P.; Ayoub, F.; Wei, S.; Ampuero, J.-P.; Meng, L.; Leprince, S.; Jolivet, R.; Duputel, Z.; Helmberger, D. The 2013, Mw 7.7 Balochistan earthquake, energetic strike-slip reactivation of a thrust fault. Earth Planet. Sci. Lett. 2014, 391, 128–134. [Google Scholar] [CrossRef]
- Simons, M.; Fialko, Y.; Rivera, L. Coseismic Deformation from the 1999 Mw 7.1 Hector Mine, California, Earthquake as Inferred from InSAR and GPS Observations. Bull. Seismol. Soc. Am. 2002, 92, 1390–1402. [Google Scholar] [CrossRef]
- Sudhaus, H.; Jónsson, S. Source model for the 1997 Zirkuh earthquake (MW = 7.2) in Iran derived from JERS and ERS InSAR observations. Geophys. J. Int. 2011, 185, 676–692. [Google Scholar] [CrossRef]
- Owen, S.E.; Fielding, E.J.; Yun, S.H.; Yue, H.; Polet, J.; Riel, B.V.; Liang, C.; Huang, M.H.; Webb, F.; Simons, M.; et al. The Advanced Rapid Imaging and Analysis (ARIA) Project’s Response to the April 25, 2015 M7.8 Nepal Earthquake: Rapid Measurements and Models for Science and Situational Awareness. In Proceedings of the AGU Fall Meeting, San Francisco, CA, USA, 14–18 December 2015. [Google Scholar]
- Barnhart, W.D.; Lohman, R.B.; Mellors, R.J. Active accommodation of plate convergence in Southern Iran: Earthquake locations, triggered aseismic slip, and regional strain rates. J. Geophys. Res. Solid Earth 2013, 118, 5699–5711. [Google Scholar] [CrossRef]
- Ferreira, A.M.G.; Weston, J.; Funning, G.J. Global compilation of interferometric synthetic aperture radar earthquake source models: 2. Effects of 3-D Earth structure. J. Geophys. Res. Solid Earth 2011, 116, 1–21. [Google Scholar] [CrossRef]
- Lohman, R.B.; Simons, M. Locations of selected small earthquakes in the Zagros mountains. Geochem. Geophys. Geosystems 2005, 6, 1–10. [Google Scholar] [CrossRef]
- Weston, J.; Ferreira, A.M.G.; Funning, G.J. Global compilation of interferometric synthetic aperture radar earthquake source models: 1. Comparisons with seismic catalogs. J. Geophys. Res. Solid Earth 2011, 116, 1–20. [Google Scholar] [CrossRef]
- Langbein, J.; Murray, J.R.; Snyder, H.A. Coseismic and Initial Postseismic Deformation from the 2004 Parkfield, California, Earthquake, Observed by Global Positioning System, Electronic Distance Meter, Creepmeters, and Borehole Strainmeters. Bull. Seismol. Soc. Am. 2006, 96, S304–S320. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.C.; Kremer, C. Harnessing the GPS data explosion for interdisciplinary science. Eos Trans. Am. Geophys. Union 2018, 99. [Google Scholar] [CrossRef]
- Báez, J.C.; Leyton, F.; Troncoso, C.; del Campo, F.; Bevis, M.; Vigny, C.; Moreno, M.; Simons, M.; Kendrick, E.; Parra, H.; et al. The Chilean GNSS Network: Current Status and Progress toward Early Warning Applications. Seismol. Res. Lett. 2018, 89, 1546–1554. [Google Scholar] [CrossRef]
- Rosen, P.A.; Gurrola, E.; Sacco, G.F.; Zebker, H. The InSAR scientific computing environment. In Proceedings of the EUSAR 2012; 9th European Conference on Synthetic Aperture Radar, Nuremberg, Germany, 23–26 April 2012; pp. 730–733. [Google Scholar]
- Sandwell, D.; Mellors, R.; Tong, X.; Wei, M.; Wessel, P. Open radar interferometry software for mapping surface Deformation. Eos Trans. Am. Geophys. Union 2011, 92, 234. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Peltzer, G.; Simons, M. Updated repeat orbit interferometry package released. Eos Trans. Am. Geophys. Union 2004, 85, 47. [Google Scholar] [CrossRef]
- Lohman, R.B.; Simons, M. Some thoughts on the use of InSAR data to constrain models of surface deformation: Noise structure and data downsampling. Geochem. Geophys. Geosystems 2005, 6, 1–12. [Google Scholar] [CrossRef]
- Lohman, R.B.; Barnhart, W.D. Evaluation of earthquake triggering during the 2005-2008 earthquake sequence on Qeshm Island, Iran. J. Geophys. Res. Solid Earth 2010, 115, 1–13. [Google Scholar] [CrossRef]
- Sambridge, M. Geophysical inversion with a neighbourhood algorithm—I. Searching a parameter space. Geophys. J. Int. 1999, 138, 479–494. [Google Scholar] [CrossRef]
- Hayes, G.P.; Moore, G.L.; Portner, D.E.; Hearne, M.; Flamme, H.; Furtney, M.; Smoczyk, G.M. Slab2, a comprehensive subduction zone geometry model. Science 2018, 362, 58–61. [Google Scholar] [CrossRef] [PubMed]
- Plesch, A.; Shaw, J.H.; Benson, C.; Bryant, W.A.; Carena, S.; Cooke, M.; Dolan, J.; Fuis, G.; Gath, E.; Grant, L.; et al. Community Fault Model (CFM) for Southern CaliforniaCommunity Fault Model (CFM) for Southern California. Bull. Seismol. Soc. Am. 2007, 97, 1793–1802. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Lohman, R.B. Automated fault model discretization for inversions for coseismic slip distributions. J. Geophys. Res. Solid Earth 2010, 115, 1–17. [Google Scholar] [CrossRef]
- Jolivet, R.; Duputel, Z.; Riel, B.; Simons, M.; Rivera, L.; Minson, S.E.; Zhang, H.; Aivazis, M.A.G.; Ayoub, F.; Leprince, S.; et al. The 2013 Mw 7.7 Balochistan Earthquake: Seismic Potential of an Accretionary Wedge. Bull. Seismol. Soc. Am. 2014, 104, 1020–1030. [Google Scholar] [CrossRef]
- Barnhart, W.D.; Briggs, R.W.; Reitman, N.G.; Gold, R.D.; Hayes, G.P. Evidence for slip partitioning and bimodal slip behavior on a single fault: Surface slip characteristics of the 2013 Mw7.7 Balochistan, Pakistan earthquake. Earth Planet. Sci. Lett. 2015, 420, 1–11. [Google Scholar] [CrossRef]
- Gold, R.D.; Reitman, N.G.; Briggs, R.W.; Barnhart, W.D.; Hayes, G.P.; Wilson, E. On- and off-fault deformation associated with the September 2013 Mw 7.7 Balochistan earthquake: Implications for geologic slip rate measurements. Tectonophysics 2015, 660, 65–78. [Google Scholar] [CrossRef]
- Elliott, J.R.; Jolivet, R.; González, P.J.; Avouac, J.-P.; Hollingsworth, J.; Searle, M.P.; Stevens, V.L. Himalayan megathrust geometry and relation to topography revealed by the Gorkha earthquake. Nat. Geosci. 2016, 9, 174–180. [Google Scholar] [CrossRef]
- Galetzka, J.; Melgar, D.; Genrich, J.F.; Geng, J.; Owen, S.; Lindsey, E.O.; Xu, X.; Bock, Y.; Avouac, J.-P.; Adhikari, L.B.; et al. Slip puise and resonance of the Kathmandu basin during the 2015 Gorkha earthquake, Nepal. Science 2015, 349, 1091–1095. [Google Scholar] [CrossRef] [PubMed]
- Lindsey, E.O.; Natsuaki, R.; Xu, X.; Shimada, M.; Hashimoto, M.; Melgar, D.; Sandwell, D.T. Line-of-sight displacement from ALOS-2 interferometry: Mw 7.8 Gorkha Earthquake and Mw 7.3 aftershock. Geophys. Res. Lett. 2015, 42. [Google Scholar] [CrossRef]
- Bao, H.; Ampuero, J.-P.; Meng, L.; Fielding, E.J.; Liang, C.; Milliner, C.W.D.; Feng, T.; Huang, H. Early and persistent supershear rupture of the 2018 magnitude 7.5 Palu earthquake. Nat. Geosci. 2019, 12, 200–205. [Google Scholar] [CrossRef]
- Socquet, A.; Hollingsworth, J.; Pathier, E.; Bouchon, M. Evidence of supershear during the 2018 magnitude 7.5 Palu earthquake from space geodesy. Nat. Geosci. 2019, 12, 192–199. [Google Scholar] [CrossRef]
- Baltay, A.S.; Boatwright, J. Ground-Motion Observations of the 2014 South Napa Earthquake. Seismol. Res. Lett. 2015, 86, 355–360. [Google Scholar] [CrossRef]
- Dreger, D.S.; Huang, M.-H.; Rodgers, A.; Taira, T.; Wooddell, K. Kinematic Finite-Source Model for the 24 August 2014 South Napa, California, Earthquake from Joint Inversion of Seismic, GPS, and InSAR Data. Seismol. Res. Lett. 2015, 86, 327–334. [Google Scholar] [CrossRef]
- Hudnut, K.W.; Brocher, T.M.; Prentice, C.S.; Boatwright, J.; Brooks, B.A.; Aagaard, B.T.; Blair, J.L.; Fletcher, J.P.B.; Erdem, J.; Wicks, C., Jr.; et al. Key recovery factors for the August 24, 2014, South Napa Earthquake; Open-File Report; U.S. Geological Survey: Reston, VA, USA, 2014.
- Brooks, B.A.; Minson, S.E.; Glennie, C.L.; Nevitt, J.M.; Dawson, T.; Rubin, R.; Ericksen, T.L.; Lockner, D.; Hudnut, K.; Langenheim, V.; et al. Buried shallow fault slip from the South Napa earthquake revealed by near-field geodesy. Sci. Adv. 2017, 3, e1700525. [Google Scholar] [CrossRef]
- Lienkaemper, J.J.; DeLong, S.B.; Domrose, C.J.; Rosa, C.M. Afterslip Behavior following the 2014 M 6.0 South Napa Earthquake with Implications for Afterslip Forecasting on Other Seismogenic Faults. Seismol. Res. Lett. 2016, 87, 609–619. [Google Scholar] [CrossRef]
- Wei, S.; Barbot, S.; Graves, R.; Lienkaemper, J.J.; Wang, T.; Hudnut, K.; Fu, Y.; Helmberger, D. The 2014 Mw 6.1 South Napa Earthquake: A Unilateral Rupture with Shallow Asperity and Rapid Afterslip. Seismol. Res. Lett. 2015, 86, 344–354. [Google Scholar] [CrossRef]
- Grapenthin, R.; Johanson, I.; Allen, R.M. The 2014 Mw 6.0 Napa earthquake, California: Observations from real-time GPS-enhanced earthquake early warning. Geophys. Res. Lett. 2014, 41, 8269–8276. [Google Scholar] [CrossRef]
- Yun, S.-H.; Hudnut, K.; Owen, S.; Webb, F.; Simons, M.; Sacco, P.; Gurrola, E.; Manipon, G.; Liang, C.; Fielding, E.; et al. Rapid Damage Mapping for the 2015 Mw 7.8 Gorkha Earthquake Using Synthetic Aperture Radar Data from COSMO–SkyMed and ALOS-2 Satellites. Seismol. Res. Lett. 2015, 86, 1549–1556. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. New, improved version of generic mapping tools released. Eos Trans. Am. Geophys. Union 1998, 79, 579. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Date | Longitude | Latitude | Mw | Data | Time |
|---|---|---|---|---|---|---|
| Iran | 9 April 2013 | 51.593 | 28.428 | 6.4 | InSAR | 14d 14h |
| Iran [12] | 16 April 2013 | 61.996 | 28.033 | 7.7 | InSAR | 01d 03h |
| Iran | 11 May 2013 | 57.77 | 26.56 | 6.1 | InSAR | 08d 00h |
| New Zealand | 21 July 2013 | 174.337 | −41.704 | 6.5 | GPS | - |
| New Zealand | 16 August 2013 | 174.152 | −41.734 | 6.5 | GPS | - |
| Pakistan [13] | 24 September 2013 | 65.501 | 26.951 | 7.7 | Optical | 01d 23h |
| New Zealand | 19 Jannuary 2014 | 175.814 | −40.66 | 6.1 | GPS | - |
| California, U.S. | 10 March 2014 | −125.134 | 40.829 | 6.8 | GPS | - |
| California, U.S. | 28 March 2014 | −117.916 | 33.932 | 5.1 | GPS | - |
| Chile [14] | 1 April 2014 | −70.796 | −19.61 | 8.2 | InSAR, GPS | 02d 10h |
| Chile [14] | 3 April 2014 | −70.493 | −20.571 | 7.7 | InSAR | 01d 07h |
| Iran | 17 August 2014 | 47.695 | 32.703 | 6.2 | InSAR | 07d 12h |
| California, U.S. [7,8] | 24 August 2014 | −122.312 | 38.215 | 6.0 | InSAR, GPS | 02d 16h |
| Nepal [11,15] | 25 April 2015 | 84.731 | 28.23 | 7.8 | InSAR, GPS | 03d 06h |
| Nepal [11,15] | 12 May 2015 | 86.066 | 27.809 | 7.3 | InSAR | 04d 11h |
| Chile [16,17] | 16 September 2015 | −71.674 | −31.573 | 8.3 | InSAR, GPS | 00d 11h |
| Japan | 15 April 2016 | 130.754 | 32.791 | 7.0 | InSAR | 00d 23h |
| Australia | 20 May 2016 | 129.884 | −25.566 | 6.0 | InSAR | 05d 02h |
| Italy | 24 August 2016 | 13.188 | 42.723 | 6.2 | InSAR | 02d 02h |
| Oklahoma, U.S. [18,19] | 3 September 2016 | −96.929 | 36.425 | 5.8 | InSAR | 05d 12h |
| Italy | 26 October 2016 | 13.067 | 42.956 | 6.1 | InSAR | 00d 21h |
| Italy | 30 October 2016 | 13.096 | 42.862 | 6.6 | InSAR | 00d 22h |
| Oklahoma, U.S. [19] | 7 November 2016 | −96.803 | 35.991 | 5.0 | InSAR | 00d 22h |
| New Zealand | 13 November 2016 | 173.054 | −42.737 | 7.8 | InSAR | 01d 20h |
| Idaho, U.S. | 2 September 2017 | −111.449 | 42.647 | 5.3 | InSAR | 07d 01h |
| Mexico | 19 September 2017 | −98.489 | 18.55 | 7.1 | InSAR, GPS | 00d 06h |
| Mexico | 23 September 2017 | −95.078 | 16.626 | 6.1 | InSAR | 01d 23h |
| Iran [20,21] | 12 November 2017 | 45.959 | 34.911 | 7.3 | InSAR | 04d 21h |
| Mexico Papua New Guinea | 16 February 2018 25 February 2018 | −97.979 142.754 | 16.386 −6.07 | 7.2 7.5 | InSAR InSAR | 00d 01h 00d 21h |
| Indonesia | 5 August 2018 | 116.438 | −8.258 | 6.9 | InSAR | 00d 10h |
| Alaska, U.S. | 12 August 2018 | −145.3 | 69.562 | 6.3 | InSAR | 03d 07h |
| Alaska, U.S. | 12 August 2018 | −144.36 | 69.52 | 6.1 | InSAR | 03d 01h |
| Indonesia | 19 August 2018 | 116.627 | −8.319 | 6.9 | InSAR | 00d 20h |
| Palu, Indonesia | 28 September 2018 | 119.846 | −0.256 | 7.5 | Optical, InSAR | 03d 16h |
| Alaska, U.S. | 30 November 2018 | −149.955 | 61.346 | 7.1 | InSAR, GPS | 03d 23h |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barnhart, W.D.; Hayes, G.P.; Wald, D.J. Global Earthquake Response with Imaging Geodesy: Recent Examples from the USGS NEIC. Remote Sens. 2019, 11, 1357. https://doi.org/10.3390/rs11111357
Barnhart WD, Hayes GP, Wald DJ. Global Earthquake Response with Imaging Geodesy: Recent Examples from the USGS NEIC. Remote Sensing. 2019; 11(11):1357. https://doi.org/10.3390/rs11111357
Chicago/Turabian StyleBarnhart, William D., Gavin P. Hayes, and David J. Wald. 2019. "Global Earthquake Response with Imaging Geodesy: Recent Examples from the USGS NEIC" Remote Sensing 11, no. 11: 1357. https://doi.org/10.3390/rs11111357
APA StyleBarnhart, W. D., Hayes, G. P., & Wald, D. J. (2019). Global Earthquake Response with Imaging Geodesy: Recent Examples from the USGS NEIC. Remote Sensing, 11(11), 1357. https://doi.org/10.3390/rs11111357