1. Introduction
As a new multi-purpose data acquisition platform, unmanned aerial vehicles (UAV) can quickly acquire remote sensing information about land resources, and are being applied more and more widely. Remote sensing technology based on UAV is mainly applied in many fields, such as forest fire monitoring [
1,
2], oil, gas and mineral exploration and production [
3], meteorological research [
4,
5], and farmland and pasture management [
6,
7,
8,
9]. However, the remote sensing images can be susceptible to environmental conditions at the time of data acquisition [
10,
11]. Such as sensor noise, atmospheric scattering and absorption, all of these will introduce noises and errors into remote sensing images [
12]. On the other hand, the images obtained by the sensor are stored in the form of digital numbers (DNs), which is not the true meaning of surface reflectance. It is not a direct measure of reflectance, which will change with illumination condition and consistency of sensor [
13,
14]. Therefore, the radiometric calibration of remote sensor is the precondition and key to the quantification of remote sensing information [
15], because it converts DNs to physical units of reflectance, and makes quantitative analysis data from different sensors or times of the day possible [
16].
With the study of radiation calibration, many methods have been developed. Most researchers used the empirical line method (ELM) to calibrate remote sensing data to surface reflectance, assuming that the relationship between them is linear, and established linear calibration equations by using the calibration targets to convert DNs to reflectance for each sensor band [
17,
18,
19,
20,
21,
22,
23]. Some of them used two calibration targets of different gray levels and developed a workflow to calibrate the imagery [
18,
19,
20], while others used more targets to improve the calibration accuracy [
22]. However, some researchers found that the relationship between DNs and surface reflectance is not always linear, and they used a nonlinear model which conforms to the objective principles of physics to establish the regression equation [
15,
24,
25,
26]. For example, Lei et al. used the power transformation relation of visible bands and the linear transformation relation of NIR bands to fit the radiometric calibration model [
15]. Additionally, Wang et al. found that the relationship between image raw DNs and surface reflectance in their experiment is not linear but exponential, and they used the natural log-transformed reflectance value and DNs to build the empirical line calibration equation [
24]. In these studies, whether linear or nonlinear methods, all of these methods calibrated each band separately. However, the regularity that the reflectance of ground object changes with wavelength is very valuable information. The spectral curve of the ground object is the embodiment of the structure and morphology of the ground object [
27,
28]. The curve formed by the reflectance of each band of the image should be consistent with the real spectral curve of the ground object, which is very prominent in the application of hyperspectral and multispectral remote sensing, such as spectral matching ground object recognition and spectral similarity classification [
29,
30,
31,
32,
33,
34]. With the continuous progress of hyperspectral and multispectral technology, the number of spectral channels increases gradually. If spectral regularity can be applied to radiation calibration, the accuracy of radiation calibration will be improved.
This paper presents a method that was named Spectral Angle Constraint Method (SACM). This method comprehensively analyzes the spectral characteristics of various typical features of multi-spectral images, combines the characteristic information of spectral reflectance, and then adds the constraint equation of spectral information. The radiation calibration model was optimized by using the consistency condition of spectral information, so as to improve its precision.
The objective of this study is to establish a radiometric calibration method, which can comprehensively consider the spectral and radiation information, so as to improve the precision of calibration. The paper has the following structure and organization. First, the proposed calculation process of the radiometric calibration is discussed and deduced in
Section 2. The study area, the instruments used in the experiment, and the process of data acquisition are described in
Section 3.
Section 4 presents the results and precision of the radiometric calibration. Then the results achieved are analyzed and validated in
Section 5, as well as a case to validate the SACM has advantages in agricultural application. Finally, in
Section 6, we summarize our research results and look forward to the future work.
2. Methodology
According to the empirical line method, DNs recorded by sensor and reflectance of ground targets had a direct relationship as:
where
ρ is the reflectance of ground targets,
and
are the calibration coefficients of each camera channel, which are used to correct the influence of sensor noise, atmospheric scattering, and absorption.
However, for multi-spectral images, each ground target contains information of multiple channels, which form the reference reflectance vector:
Corresponding, the result of calibration constitute the predicted reflectance vector:
If the calibration is accurate, then according to the spectral angle equation,
and
has the relationship as:
Combined with Equations (2), (3), and (4), the relationship of each band can be obtained as follows:
All the above sum terms are square terms, if the equation is true, then each sum term is zero, and the relationship of each band can be represented by the following equation:
Then the spectral angle constraint was constructed as:
Assuming that n sample points are involved in modeling, and each sample point is a vector composed of m bands, then the calibration coefficients of each band have the relationship as:
where
represent the reflectance of i-th band of the j-th sample point, and
represent the DN value of i-th band of the j-th sample point.
According to Equation (8), let matrix
and
represent the following formula:
Then the relation between
and
can be expressed by the following formula:
Thus, the radiometric calibration equation of each band can be converted into the form of Equation (11), making full use of the information of all bands.
where
are known values, which were calculated by
. Then all of the sample points can construct a set of equations like Equation (11), and through the least squares to solve the calibration coefficients
, and
can be obtained in the same way.
To verify the validity of the method in this paper, the experiment will be divided into two parts: firstly, a variety of ground targets were selected as samples, and the empirical line method (ELM) and spectral Angle constraint method (SACM) were used for experiments, and then evaluate the calibration precision of two methods, as well as analyze the advantages and disadvantages of SACM. Secondly, in order to further analyze the applicability of the SACM, separate experiments were conducted on different spectral constraint targets, and the modeling effects of different ground targets were compared and analyzed to discuss the application scope of the method in this paper.
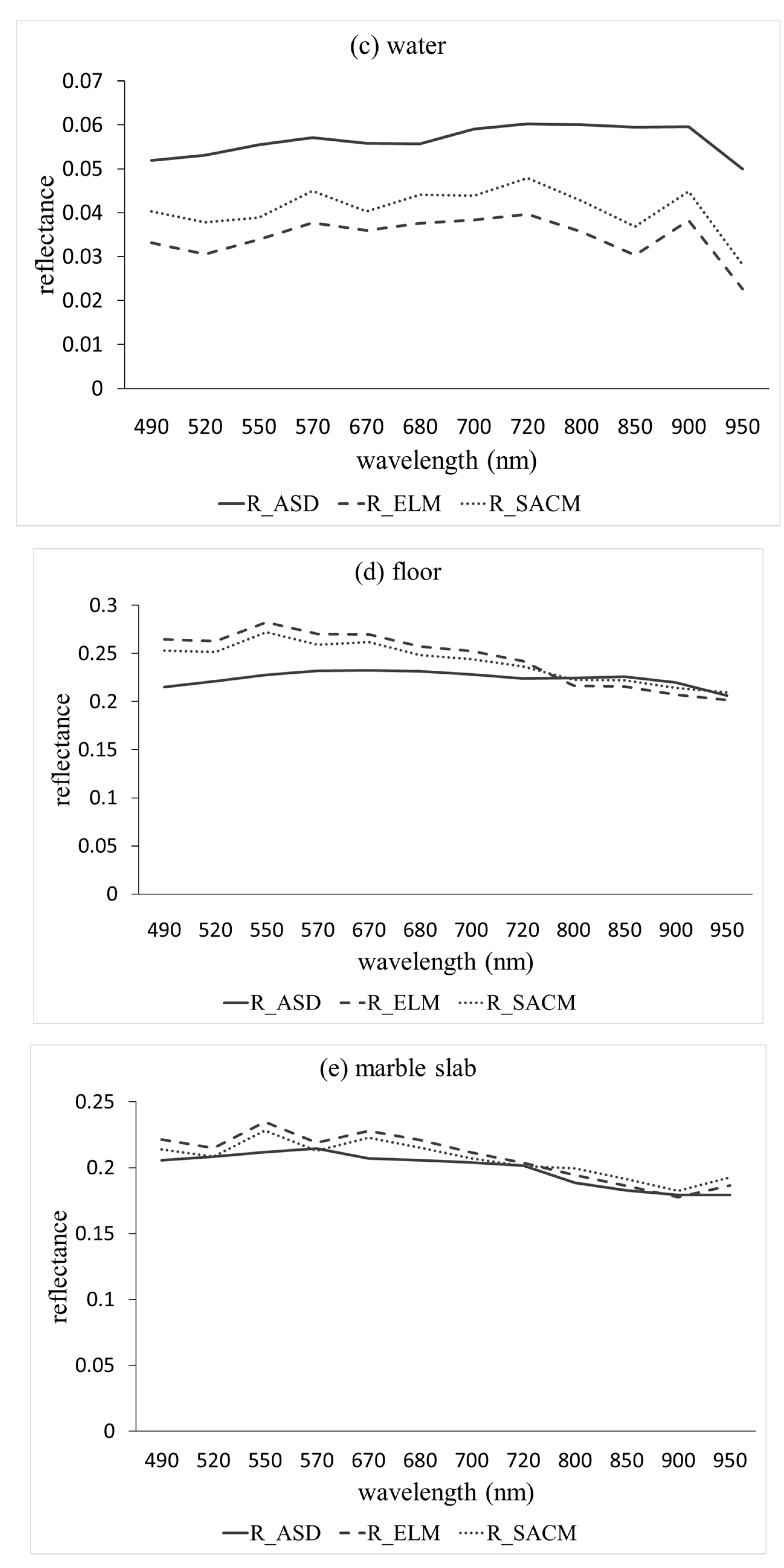
4. Results
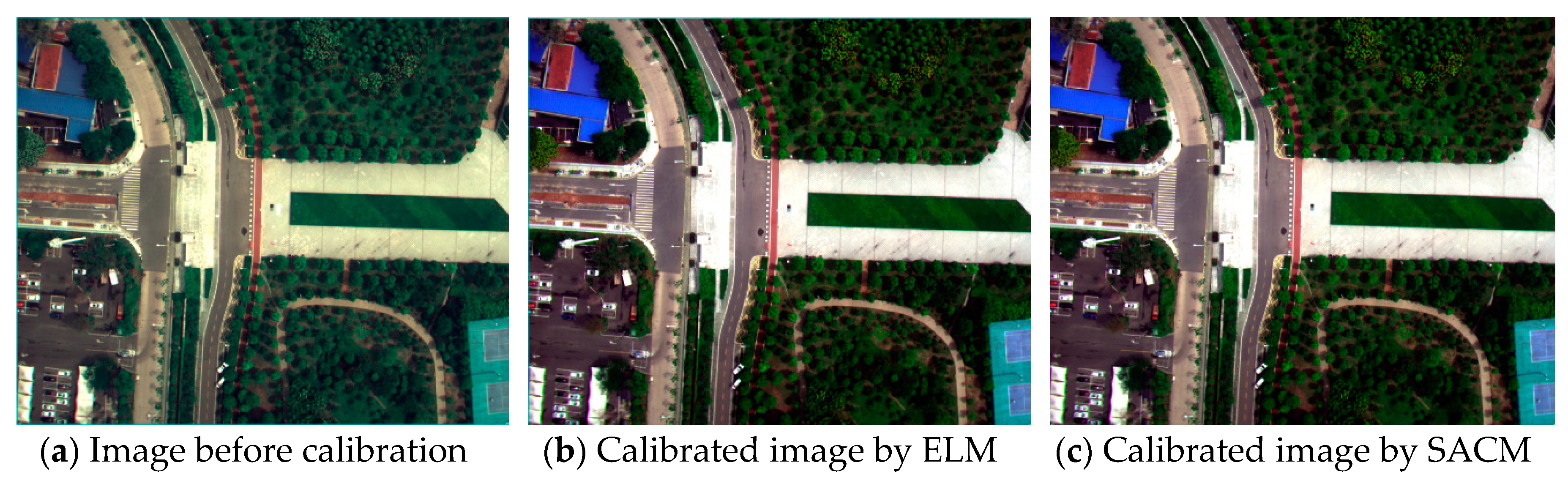
Figure 8 shows the images before and after radiometric calibration by using ELM and SACM, and the calibration coefficients of each band are shown in
Table 5. Compare these three images, both of the two methods can improve the image quality if looking at the visual outcome. The brightness level of images in
Figure 8b,c are obviously higher than that in
Figure 8a, and it can be seen from the comparison results of the three images, there is obvious aberration in the blue and green bands before calibration, thus resulting in the image having a yellowish color. After radiometric calibration, this phenomenon can be eliminated effectively by both two methods.
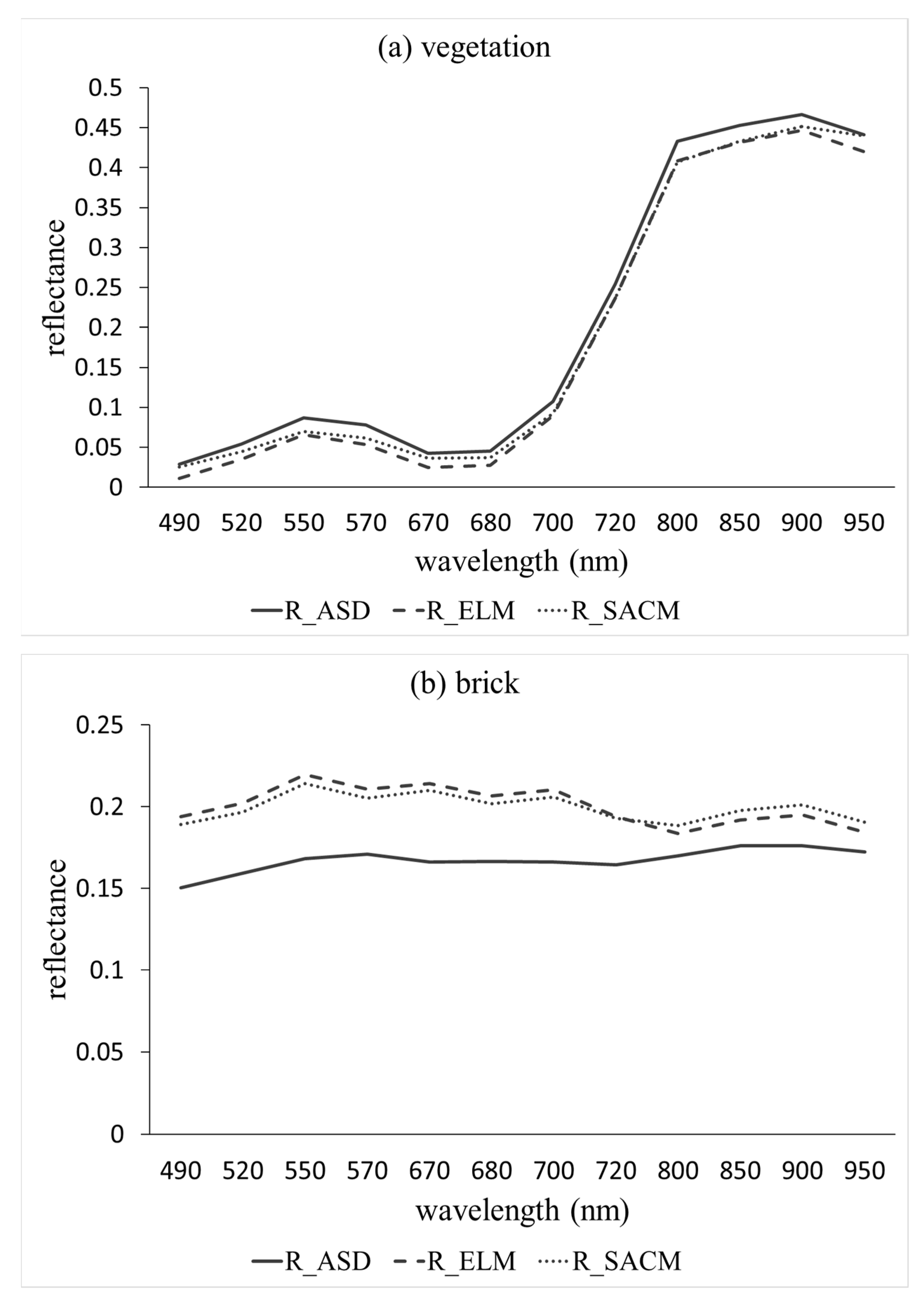
The precision of ELM and SACM were evaluated by comparing reference reflectance collected by spectroradiometer at ground level for the validation samples, and some examples were shown in
Figure 9. For these samples, reflectance derived from UAV image using two radiometric calibration methods behaved similar and close to ground-measured reflectance. And it easy to find that the absolute error of each band is within 0.05 for all ground targets. By comparing the results of the two methods, the reflectance obtained by SACM is closer to the ground-measured reflectance than that obtained by ELM in most bands, especially in the visible bands.
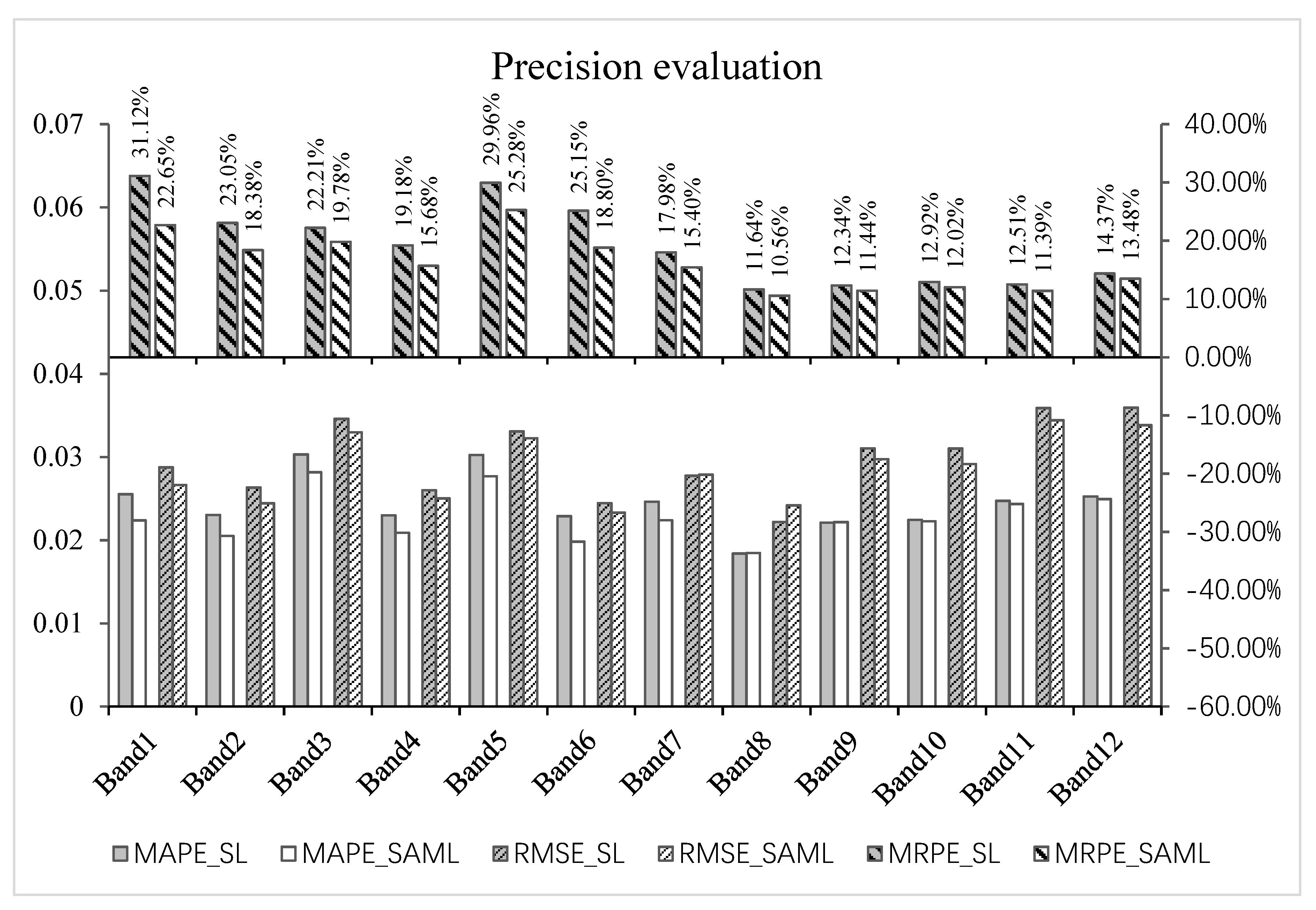
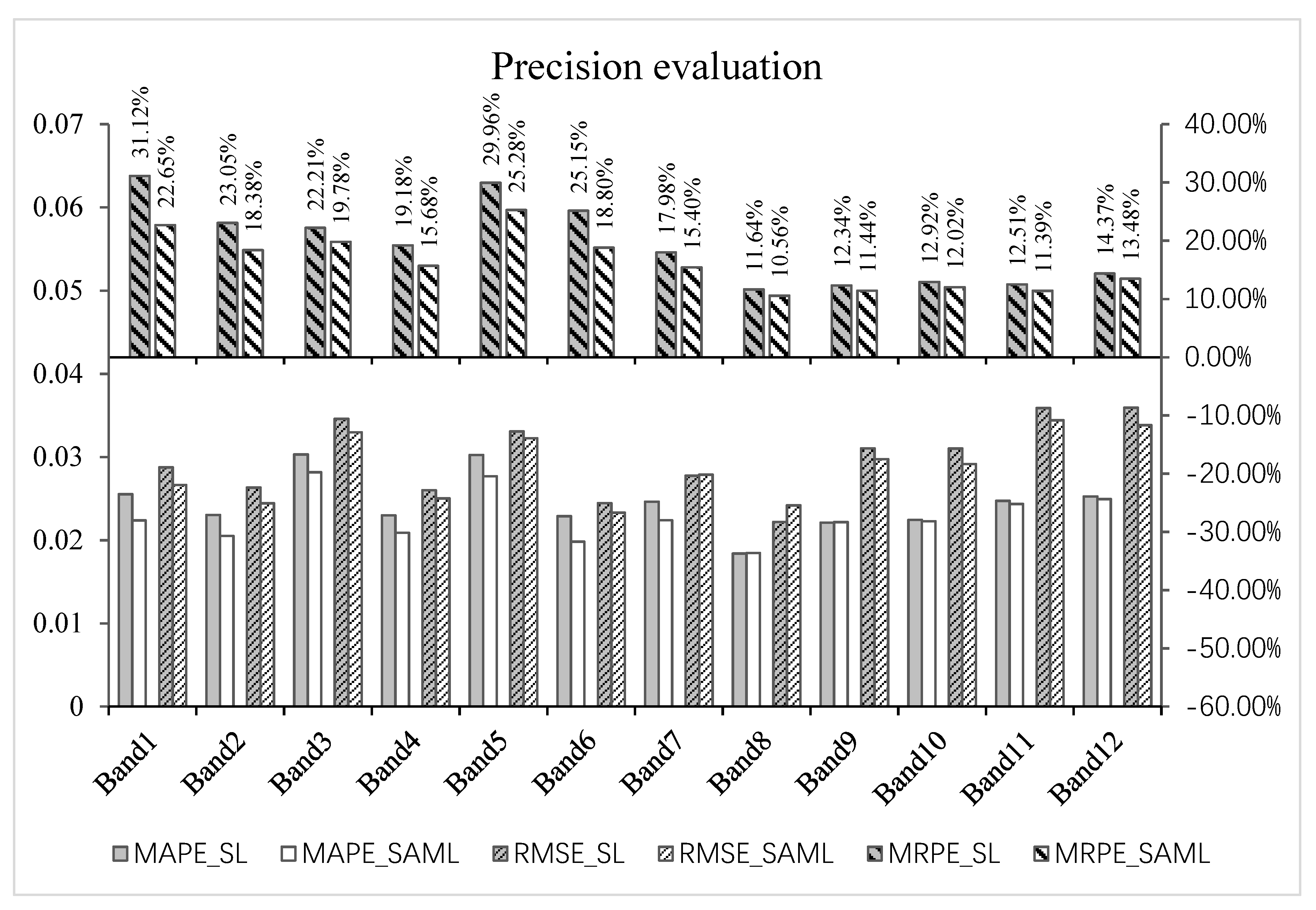
In order to evaluate the advantages and disadvantages of the two methods, the precision results of all the verified samples were statistically analyzed, and the Mean Absolute Error (MAE), Mean Relative Percent Error (MRPE) and Root Mean Square Error (RMSE) were used for evaluation. The equations of evaluation indicators are shown in
Table 6, and the results are shown in
Figure 10. As can be seen from
Figure 10, comparing with ELM, the method proposed in this paper can improve the precision of the radiometric calibration, especially in the range of visible band, which can improve the precision obviously, with the improvement range of MRPE being more than 3% of each band. However, in the range of near-infrared band, SACM has a limited effect on the improvement of accuracy, and the precision of MRPE is basically within 1%. The precision of MAE behaved similar to that of MRPE, with obvious improvement in the visible range and limited improvement in the near-infrared band. Except bands with central wavelength of 700 nm and 720 nm, the RMSE of SACM in other bands is smaller than that of ELM, indicating that the overall precision has been improved. The results of MAE, MRPE and RMSE show that the SACM, which was proposed in this paper can realize the radiometric calibration of UAV remote sensing, and has certain advantages in radiometric calibration precision compared with the ELM.
In the formulas, represents the reflectance derived by ELM or SACM, represents the reflectance obtained by spectroradiometer, and represents the number of samples.
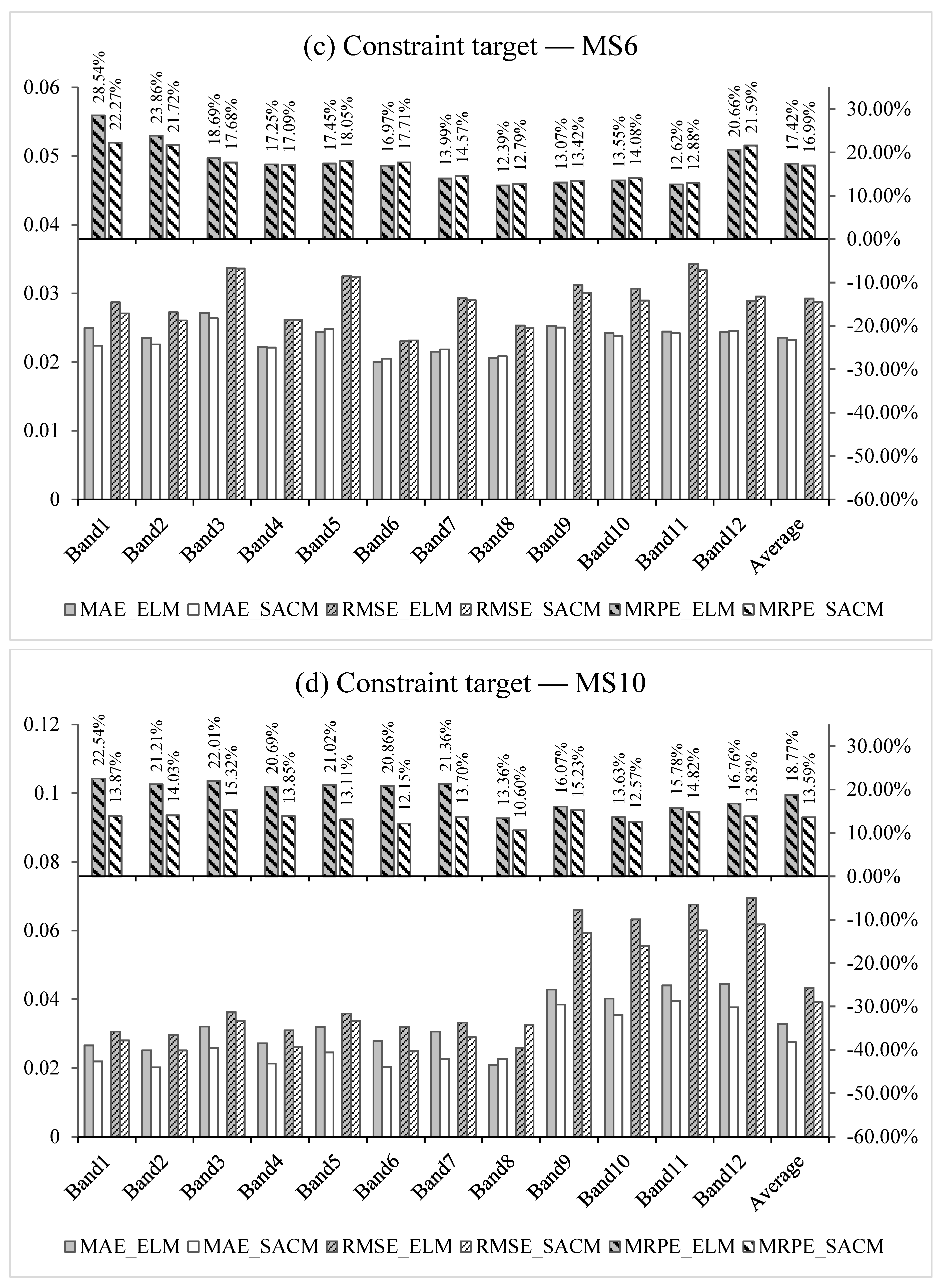
In order to further analyze the applicability of the SACM, separate experiments were conducted on different spectral constraint targets, and MAE, MRPE, and RMSE were used to verify the precision of samples, the results are shown in
Figure 11, and the average errors of all bands is shown in
Table 7. It can be seen in
Figure 11a–c and
Table 7, the radiometric calibration precision of the ELM and SACM behave similar. The calibration precision of SACM is slightly better than that of ELM in some bands, while slightly lower in other bands, and the average error of the two methods are basically consistent. However, when using vegetation for constraint modeling, SACM has great advantages in calibration precision, as shown in
Figure 11d and
Table 7. The average error of this method is about 5% higher than that of the ELM, and for each band, the MRPE of this method is smaller than that of the ELM. Besides, except the 8th band, the MAE and RMSE of other bands are better than that of the ELM. This result seems to show that in practical applications, the use of vegetation constraint modeling will be conducive to improve the precision of radiation calibration, and it also shows that the method proposed in this paper is more suitable for multi-vegetation coverage areas.
5. Discussion
The spectral angle constraint method proposed in this paper is different from other remote sensing radiometric calibration methods of UAV. It makes full use of the spectral information of ground targets, so that the radiometric calibration process is no longer an independent calibration between each band, but combines the information of all bands to calibrate, which improves the precision of radiometric calibration. With the increase of spectral bands, the information between spectral bands will also increase. This method can make full use of the information of all bands, so for hyperspectral images, the method can provide more information in radiometric calibration, which is more conducive to improving the accuracy of radiation calibration. According to the results of separate experiments on different spectral constraint targets, the use of vegetation constraint modeling can greatly improve the precision of radiation calibration, while the results of other targets constraint modeling show that the precision of two methods is basically consistent. As can be seen from
Figure 7, the form of vegetation spectral curve fluctuates greatly, while that of other ground targets is relatively flat. By using the standard deviation (STD) to evaluate the flatness of the spectral curve shape. The smaller the standard deviation is, the flatter the spectral curve of the ground object is. As can be seen from
Table 8, with the increase of the standard deviation, the better the effect of using this target for constraint modeling is. Thus, it can be speculated that the ground targets with obvious fluctuation in the reflectance curves have a better effect of radiometric calibration using SACM.
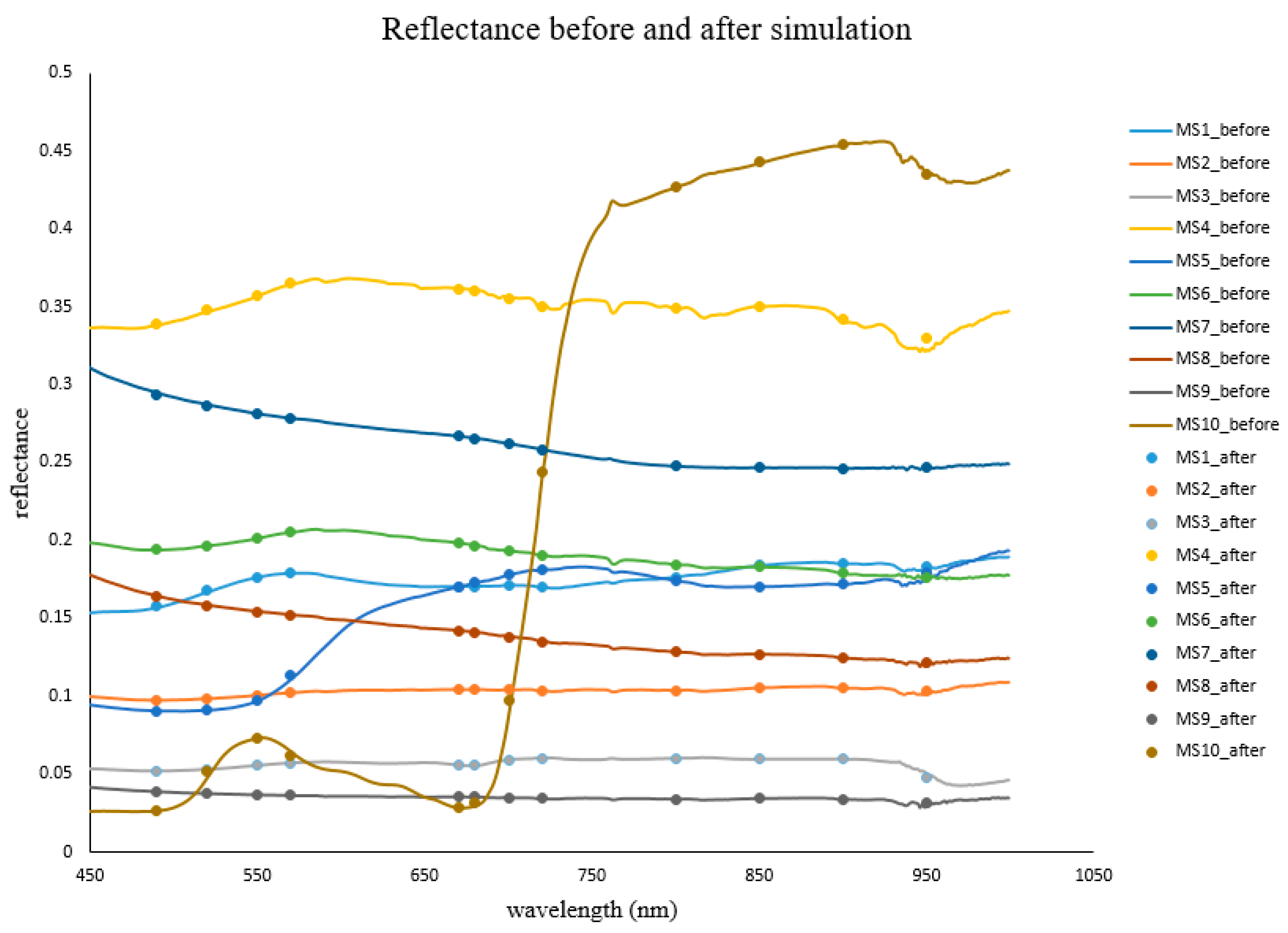
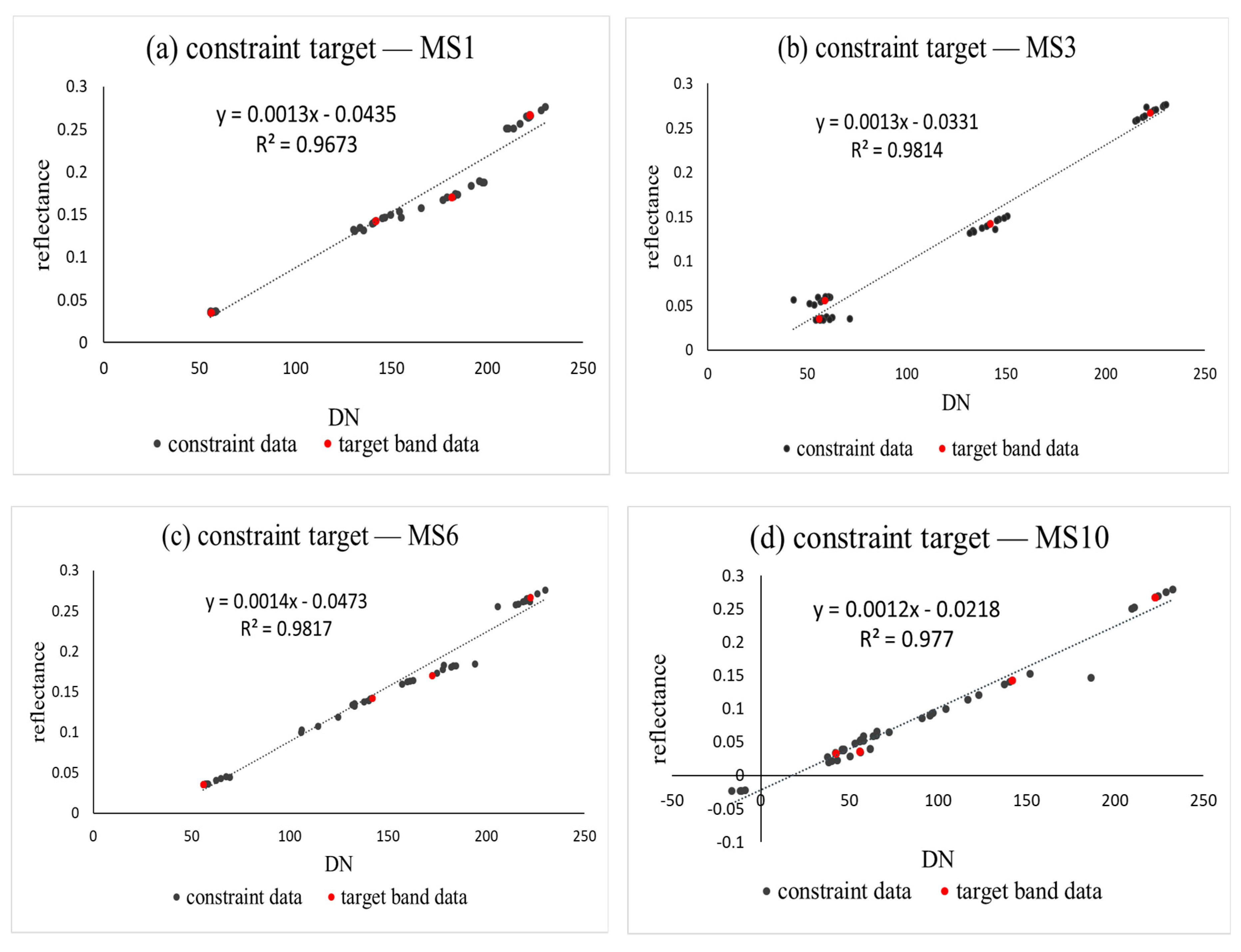
From the method in this paper, the essence is to establish a connection between the data of other bands and the target band according to Formula (10), and then generate constraint data according to Formula (11), so as to increase the amount of data used for the least squares solution. As shown in
Figure 12, when the method of this paper is adopted, the number of data originally used for least squares solution increases from several to dozens. It can be found from
Figure 12 that the constraint modeling is carried out by using ground targets with obvious fluctuation of spectral curves, can expand the range of modeling data. In the
Figure 12a–c, it can be seen that, after the constraint, the essence is to interpolate the original sample points, which results in no improvement of calibration precision. While in
Figure 12d, after vegetation constraints, the range of modeling data is not only interpolated within the original range of sample points, but also stretched, which expands the applicability of the model, and finally improves the radiation calibration precision after the constraint.
The above results show that use vegetation for constraint modeling work better than others. For many vegetation area, we can easily obtain the vegetation reflectance spectra. However, for non-vegetation-covered areas, to get vegetation reflectance spectra is difficult, and the calibration accuracy of the method in this paper is basically the same as that of the empirical linear method, but the calibration process is too complex, which restricted the application of this method, so in these areas the empirical linear method may be used for the calibration. Therefore, the method proposed in this paper is more applicable to areas with multiple vegetation coverage. For agricultural remote sensing, the method in this paper may be of great value because it focuses on crops. Therefore, the method proposed in this paper can improve the accuracy of radiometric calibration in agricultural remote sensing, thus affecting the application of agricultural remote sensing. In order to verify this conjecture, the agricultural data of EZhou was used for the experiment. Firstly, the surface reflectance data and LAI data were used to build the inversion model according to the vegetation index method [
35,
36,
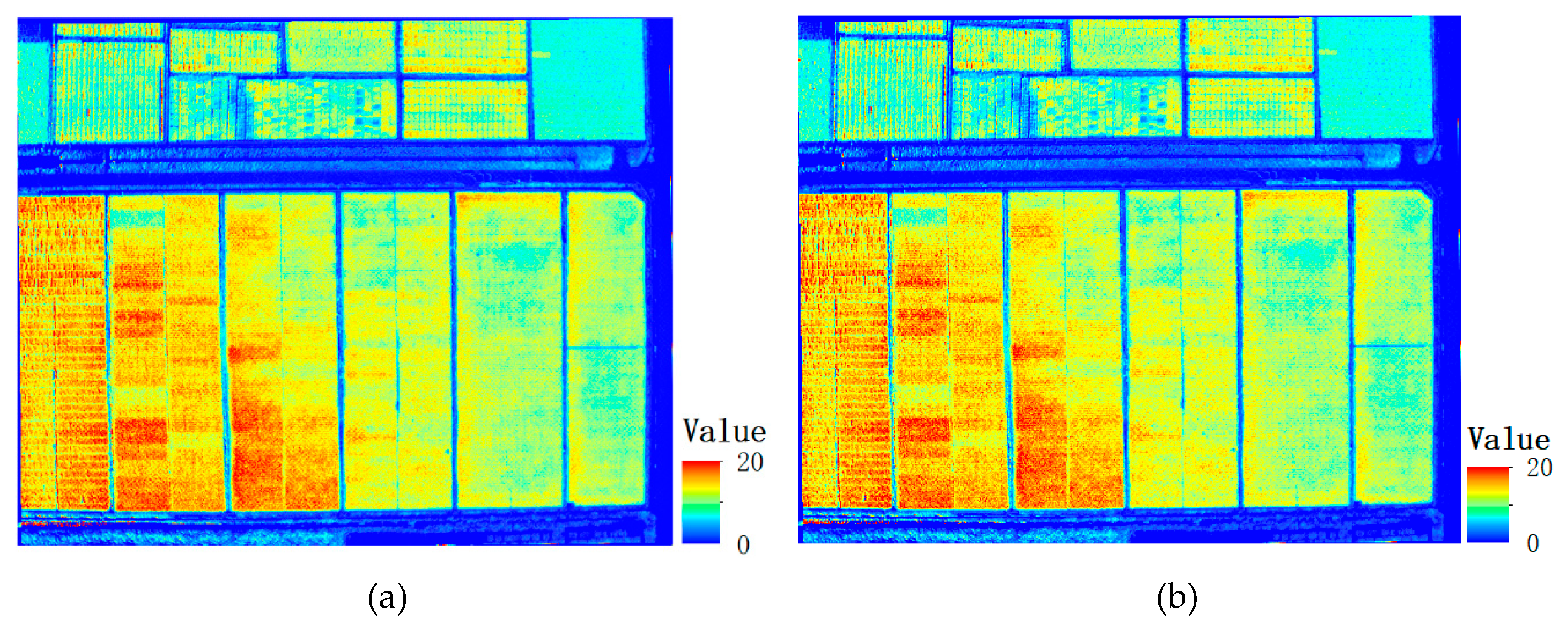
37]. Then, the UAV image was calibrated by the empirical linear method and the spectral Angle constraint method respectively, and the calibrated images were used to verify the inversion accuracy of the model. LAI images obtained by the two methods are shown in
Figure 13, and their inversion accuracy is represented by the relative error of verification points (as shown in
Figure 14).
As can be seen from the inversion results in
Figure 14, the precision of image data after radiometric calibration with SACM in inversion LAI has been improved to a certain extent, and the relative accuracy of most verification points has been improved, with the average accuracy increased from 27% to 22%. Additionally, the standard deviation of the ELM is 0.1655, while that of the SACM is 0.1498. It can be seen from the results of standard deviation that after calibration by SACM, the precision of inversion can be improved and the results of inversion can be more stable and reliable. The above experiments also confirmed that the method proposed in this paper can be more widely used in agricultural remote sensing.
6. Conclusions
The spectral angle constraint method proposed in this paper, by introducing the spectral angle constraint condition, makes full use of the information of each band of the multi-spectral image, and considers the spectral regulation of the ground targets, so that the radiometric calibration process, which was originally solved independently for each band, can be solved as a whole. Through the research of this paper, it is shown that applying the spectral regulation of ground targets to the radiometric calibration process of UAV image can improve the accuracy of radiometric calibration. Additionally, the effect of different ground targets by using SACM show great difference. When vegetation is used for constraint modeling, the accuracy of radiation calibration can be greatly improved, while other ground targets are used for constraint modeling, the calibration accuracy of ELM and SACM is basically the same. Therefore, the method in this paper will have a great application prospect when it focuses on the reflectance information of vegetation, and its application effect in agricultural remote sensing will be very significant.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}